JP2017192207A - 回転電機システムおよび回転電機システムの制御方法 - Google Patents
回転電機システムおよび回転電機システムの制御方法 Download PDFInfo
- Publication number
- JP2017192207A JP2017192207A JP2016080131A JP2016080131A JP2017192207A JP 2017192207 A JP2017192207 A JP 2017192207A JP 2016080131 A JP2016080131 A JP 2016080131A JP 2016080131 A JP2016080131 A JP 2016080131A JP 2017192207 A JP2017192207 A JP 2017192207A
- Authority
- JP
- Japan
- Prior art keywords
- power converter
- value
- voltage
- command value
- voltage command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Control Of Eletrric Generators (AREA)
Abstract
【課題】
直流部を有する交流-交流電力変換器のスイッチング回数を低減することにより高効率化を図る。
【解決手段】
第1の交流−直流電力変換器と、直流側の同極性の端子同士を接続することで前記第1の交流−直流電力変換器に電気的に接続された第2の交流−直流電力変換器と、前記第1の交流−直流電力変換器と前記第2の交流−直流電力変換器間の直流部に設けられた平滑コンデンサと、前記第1の交流−直流電力変換器および前記第2の交流−直流電力変換器を制御する制御装置と、前記第1の電力変換器または前記第2の電力変換器のうち、少なくとも一方の交流側端子に接続され、任意の回転速度で運転される回転機と、を備え、前記制御装置は、前記回転機の回転速度に応じて、前記直流部の電圧値を制御することを特徴とする。
【選択図】 図4
直流部を有する交流-交流電力変換器のスイッチング回数を低減することにより高効率化を図る。
【解決手段】
第1の交流−直流電力変換器と、直流側の同極性の端子同士を接続することで前記第1の交流−直流電力変換器に電気的に接続された第2の交流−直流電力変換器と、前記第1の交流−直流電力変換器と前記第2の交流−直流電力変換器間の直流部に設けられた平滑コンデンサと、前記第1の交流−直流電力変換器および前記第2の交流−直流電力変換器を制御する制御装置と、前記第1の電力変換器または前記第2の電力変換器のうち、少なくとも一方の交流側端子に接続され、任意の回転速度で運転される回転機と、を備え、前記制御装置は、前記回転機の回転速度に応じて、前記直流部の電圧値を制御することを特徴とする。
【選択図】 図4
Description
本発明は、2つの交流−直流電力変換器の互いの直流電圧を共有することで構成される交流−交流電力変換器を用いた回転電機システムに係り、特に、前記電力変換器を構成する半導体スイッチング素子のスイッチング動作を制御する制御装置に関する。
電気的エネルギーの高効率な形態変換方法として、半導体スイッチング素子を用いた電力変換器が注目されている。特に、電圧型電力変換器は、電流の流れを半導体スイッチング素子によって遮断することで、電気的エネルギーを電界エネルギーとしてコンデンサに蓄えたり、化学的な反応エネルギーとして蓄電池に蓄えたりできるため、磁界エネルギーとしてリアクトルに電流を常に通電して電気的エネルギーを蓄える電流型電力変換器と比べ、エネルギー保存時の通電損失が存在せず、効率の点でより優れている。
電力変換器が最も多く用いられる用途は、回転機との組み合わせであり、例えば、物理的な回転運動を電気的エネルギーに変換する発電機は、その回転数に依存した周波数の交流として電力を発生させるため、電力系統を介して電力を消費地へ送電するためには、電力変換器によって商用電力の50Hz、もしくは、60Hzの交流に変換する必要がある。また、逆に、商用電力を利用してモータ等の駆動機で任意の回転運動を得るためにも、電力変換器が不可欠である。
このような任意周波数の交流−交流変換を可能とする電圧型電力変換器で、最も広く用いられている形態は、2つの交流−直流電力変換器の互いの直流電圧を共有することで構成される電圧型電力変換器である。前述の電圧型電力変換器は、共有する直流部の直流電圧を半導体スイッチング素子の導通,非導通を制御することでパルス状の電圧を交流部に発生させ、その時間平均電圧として任意の振幅及び位相の交流電圧を模擬する。これによって、交流端に接続される交流電圧源もしくは回転機に対して、発生させる振幅と位相を調整することで電力の授受を制御し、任意周波数の交流−交流電力変換を実現する。
電力変換器の電力変換効率を高める方法の1つとして、半導体スイッチング素子のスイッチング方法の工夫がある。電力変換器が出力する交流は、相間の電位差が所定の交流電圧を形成すれば良く、三相交流の各相それぞれが、その出力電圧の絶対が最大となる区間、つまり一周期のうちの3分の1の区間、三相のうち一相についてそのスイッチングを固定することで全体のスイッチング回数を低減させ、スイッチングに伴う損失低減を図る二相スイッチングが広く一般に知られている。(特許文献1)
さらに、交流端に出力すべき交流電圧の周期に合わせて、直流側電圧の大きさを周期的に変更させ、交流側電圧の一部を、前述の直流電圧の周期的な変更で代替する方法、つまり、直流電圧の周期的な変更によって、交流側三相のうち、同時に二相のスイッチングを固定することで、二相スイッチングよりさらに効果的にスイッチングに伴う損失低減を図るスイッチング方法が提案されている。(特許文献2)
さらに、交流端に出力すべき交流電圧の周期に合わせて、直流側電圧の大きさを周期的に変更させ、交流側電圧の一部を、前述の直流電圧の周期的な変更で代替する方法、つまり、直流電圧の周期的な変更によって、交流側三相のうち、同時に二相のスイッチングを固定することで、二相スイッチングよりさらに効果的にスイッチングに伴う損失低減を図るスイッチング方法が提案されている。(特許文献2)
特許文献1では、電力系統の三相交流電圧の最大相間電圧に合わせて直流電圧を制御する技術及び電力系統の間で送受する有効電力に基づいて直流電圧を制御する技術が開示されている。しかし、電力系統の電圧安定化のために、有効電力に加えて無効電力の提供を求められる場合があり、電力系統の間で送受する有効電力によって直流電圧を周期的に制御するだけでは、無効電力の送受が実現できない。
また、交流−交流電力変換器の2つの交流端のうち少なくとも一方に回転機が接続した回転電機システムの場合、共有する直流電圧をそれぞれの交流端にパルス状の電圧として出力することで任意の振幅及び位相の交流電圧を出力するため、電力系統の三相交流電圧の最大相間電圧に合わせて直流電圧を制御すると、回転機の極数や巻線比などの電気特性及びその運転状態に依存して、直流電圧が不足する場合が発生する。
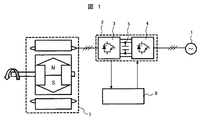
例えば図1に示す、永久磁石型回転電機システムの場合、永久磁石型回転機7の回転速度が大きくなるにつれて、振幅が増加しかつ高周波化する固定子誘起電圧に合わせて電力変換器2の3(回転機側交流直流電力変換器もくしは主発電機側電力変換器)の出力する交流電圧を制御する必要がある。つまり、電力変換器2の直流部平滑コンデンサ5の直流電圧は、永久磁石型回転機7が低速回転域では、電力系統1に合わせて周期的に変更し、高速回転域では永久磁石型回転機7に合わせて周期的に変更する必要がある。
また、図2に示す、二次励磁型回転電機システムの場合、二次励磁回転機8の同期速度近傍では回転子巻線にブラシとスリップリング9を介して励磁電力のみを提供すれば良いため、電力変換器2の3(回転機側交流直流電力変換器もくしは主発電機側電力変換器)の出力する交流電圧は振幅が小さくかつ低周波で良い。一方、すべりが大きい領域では、同期速度からの偏差が大きい程、振幅が大きくかつ高周波の交流電力を出力する必要がある。
このことから、二次励磁回転機8が低速回転域もしくは高速回転域では、二次励磁回転機8に合わせて電力変換器2の直流部平滑コンデンサ5の直流電圧を周期的に変更し、二次励磁回転機8の同期速度近傍の中速回転域では、電力系統1に合わせて周期的に変更する必要がある。
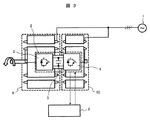
さらに、図3に示す、回転電機システムの場合、それぞれの交流側に二次励磁回転機8,10が接続されるため、図2の二次励磁回転電機システムの場合と同様に、回転数によって合わせるべき交流出力の振幅及び周波数が常に変動する。
本発明は、このような事情を鑑みてなされたものであり、図1〜図3のように、2つの交流−直流電力変換器3,4の互いの直流電圧を共有することで構成される交流−交流電力変換器を用い、前述の交流−交流電力変換器の少なくとも一方の交流端に回転電機が接続した回転電機システムにおいて、直流部の電圧を周期的に変更することで、その交流側の出力の一部を直流部の周期的な変更で代替することで、電力変換効率の点において最適な運転方法を実現する制御装置を提供することを目的とする。
上記目的を達成するために、本発明は、交流−交流電力変換器2を構成する交流−直流電力変換器3,4(以下、電力変換器3を電力変換器(A),電力変換器4を電力変換器(B)としても参照し、信号等もそれぞれどちらの電力変換器に属するかをAもしくはBの添え字によって示すものとする)の半導体スイッチング素子の駆動信号を生成する制御装置において、前述の電力変換器(A),(B)それぞれが担う機能を実現するための出力電圧指令Vk*(A), Vk*(B)(k=u,v,w)を入力として、各AとBの出力電圧指令のうち最大の相間電圧から直流電圧指令を生成する直流電圧指令値生成器(Vdc ref maker)13を備え、かつ、直流電圧指令の生成元となった電力変換器側の駆動信号生成器(PWM)12が、該当する最大電圧相の駆動信号を直流電圧正極側に導通するようにし、かつ、該当する最小電圧相の駆動信号を直流電圧負極側に導通するようにすることを特徴とする制御装置を提供する。
また、本発明は、第1の交流−直流電力変換器と、直流側の同極性の端子同士を接続することで前記第1の交流−直流電力変換器に電気的に接続された第2の交流−直流電力変換器と、前記第1の交流−直流電力変換器と前記第2の交流−直流電力変換器間の直流部に設けられた平滑コンデンサと、前記第1の交流−直流電力変換器および前記第2の交流−直流電力変換器を制御する制御装置と、前記第1の電力変換器または前記第2の電力変換器のうち、少なくとも一方の交流側端子に接続され、任意の回転速度で運転される回転機と、を備え、前記制御装置は、前記回転機の回転速度に応じて、前記直流部の電圧値を制御することを特徴とする。
また、本発明は、直流側の同極性の端子同士を接続することで互いに電気的に接続された2つの交流−直流電力変換器を有する回転電機システムの制御方法であって、回転機の回転速度に応じて、前記2つの交流−直流電力変換器間の直流電圧値を制御することを特徴とする。
本発明によれば、動作時に常に両方の交流端に出力されるべき交流電圧のうちで、最大の相間電圧に対応した電圧に合わせて直流電圧を制御することができ、これによって、どちら一方の交流側の出力の一部を直流部の周期的な変更で代替することで、電力変換効率の点において最適な運転を実現することができる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
以下、本発明に係る制御方式の実施形態について図面を参照しながら詳細に説明する。なお、各図において、共通する部分には同一の符号を付し、重複した説明を省略する。
図1から図3は、本発明が適用される回転電機システムを示す図である。本発明に係る電力変換器2は、Insulated Gate Bipolar Transistor(IGBT)等の半導体スイッチング素子と還流用整流素子であるダイオード素子が逆並列接続された半導体スイッチングユニットが複数ユニット直列接続および並列接続されることで構成される、一般に2レベル変換器や3レベル変換器等の構成をもつ2つの交流−直流電力変換器3,4で構成され、互いの直流部を接続し直流電圧を共有する構成をもち、その交流端の少なくとも一方に回転機が接続される。
直流には無効電力という概念が存在しないため、電力変換器3,4は、それぞれ、交流側の有効電力と無効電力を制御するか、直流側の有効電力と交流側の無効電力を制御するか、の2択となる。つまり、エネルギー保存則から、交流側の有効電力と直流側の有効電力を同時に独立に制御することはできず、一方を制御すると他方は損失その他を加味して一意に決まる。また、電力変換器3,4が同時に共有する直流部の有効電力、つまり、直流部の直流電圧を制御することもできない。
このことから、図1から図3に示した本発明の適用例では、一般的に、電力変換器3と電力変換器4は次の機能的役割分担をする。すなわち、回転機側電力変換器3が交流側の有効電力と無効電力もしくは有効電力に関連する回転機トルクと無効電力を制御し、電力系統側電力変換器4が直流側の有効電力と交流側の無効電力を制御する。
電力変換器3を添え字(A)で、電力変換器4を添え字(B)で参照し、前述の一般的な制御ブロックを図4に示す。図4のブロックでは、図1から図3に図示しない各検出器によって制御に必要な電流や電圧等の電気的特性が検出され、さらに、回転機の回転速度及び位相、電力系統の周波数(回転速度に対応)や位相がフーリエ変換ロジックやフェーズロックドループ回路によって同定され、前述の電気的特性値が、d軸,q軸で表現される直流量として求められているものとする。
まず、前述の一般的な機能分担のための制御ブロックについて説明する。電力変換器3は、交流側の有効電力と無効電力を制御するため、まず、有効電力指令(P*)及び無効電力指令(Q*)と有効電力と無効電力の検出値との差分がそれぞれ有効電力制御器(AC-APR/ATR)及び無効電力制御器(AC-AQR)に入力され、それぞれ有効電流指令(Id*(A))及び無効電流指令(Iq*(A))が算出され、算出された電流指令(Idq*(A))と電流検出値(Idq(A))との差分が電流制御器(AC-ACR)に入力される。
AC-ACRによって電圧指令値(Vdq*)が算出され、適切なdq/αβ変換及びαβ/UVW変換によって三相交流量に戻される。直流電圧の利用率を改善するため、三次調波を加算し、電圧指令値(Vk*(k=u,v,w))が算出される。駆動信号生成装置(PWM)12は、前述の電圧指令値と直流電圧検出値(Vdc)もしくは直流電圧の指令値(Vdc*)を入力として、三角波等の搬送波信号を前述の直流電圧量でスケーリングし、前述の電圧指令値と比較することで、半導体スイッチング素子の駆動信号を生成する。
前述の駆動信号の生成方法は、三角波比較法と呼ばれる方法であり、電圧指令値を直流電圧量(VdcもしくはVdc*)でスケーリングし、搬送波信号と比較しても良い。また、入力となる電圧指令値(Vk*(k=u,v,w))を時間平均的に表現する半導体スイッチング素子の駆動信号を生成する方式であれば任意の方式でも良く、以下に述べる基準によりスイッチング停止期間を設けられる方式であれば、本発明の効果発電に影響は無い。
同様に電力変換器4は、直流側の有効電力(直流電圧)と交流側の無効電力を制御するため、電力変換器3に対するAC-APR/ATRに代えて、直流電圧指令値(Vdc*)と直流電圧検出値(Vdc)の偏差を入力とする直流電圧制御装置(DC-AVR)によって有効電力指令値(Id*(B))が算出される以外は、電力変換器3と同様に制御される。
一般に電力変換器3,4は独立であるため、制御ロジックは異なる演算装置に実装されていても良く、必要な情報を適切に共有できれば良い。このため、それぞれ異なる制御周期で制御しても良い。一般に、電力系統には高調波に関する規程が存在するため、電力系統側電力変換器4の制御周期が回転機側電力変換器3の制御周期に比べて短く設定され、電力系統に出力交流電圧をより高速に制御することで高調波の低減を図ることが多い。
次に、本発明の効果発現に係る制御ブロックと、それに関連する前述の一般的な制御ブロックの修正点について述べる。
直流電圧指令値生成器(Vdc ref maker)13は少なくとも電力変換器3,4の電圧指令値(Vk*(A)(k=u,v,w)及びVk*(B)(k=u,v,w))を入力とし、直流電圧指令値(Vdc*)及び電力変換器3,4に係る駆動信号生成装置PWM(A),PWM(B)12へモードフラグFlag(A),Flag(B)を出力する。Vdc*は式(1)に従って算出される。ここで、Max(…)は引数リストのうち最大値を返す関数とし、Min(…)は引数リストのうち最小値を返す関数である。

さらに、モードフラグFlag(A),Flag(B)は、Vdc*にVk*(A)(k=u,v,w)の最大相間電圧が採用された場合にFlag(A)がセットされ、Vk*(B)(k=u,v,w)の最大相間電圧が採用された場合にFlag(B)がセットされる。
図5に図1に示す永久磁石型回転電機システムにおける直流電圧指令値生成器の動作波形を示す。永久磁石型回転電機システムでは、永久磁石型発電機を制御する電力変換器3側の制御(A)は、回転機の回転子回転速度に応じて生じる誘起電圧に抗して出力を制御するため、電力変換器3が出力する電圧、すなわち、出力電圧指令は回転子速度が大きくなるにつれて、出力3相交流電圧の電圧が大きく、かつ、高周波となる。
一方、系統側との電力授受を制御する電力変換器4側の制御(B)は、大きさと周波数がほぼ一定の系統電圧に合せて出力を制御するため、電力変換器4が出力する電圧、すなわち、出力電圧指令値は、系統に合せた周波数となり、かつ、その大きさはほぼ一定となる。そのため、回転子回転速度に応じて、直流電圧指令を決める電圧指令値が制御(A)に由来するのか、制御(B)に由来するのか決まる。これに応じて、直流電圧指令値生成器(Vdc ref maker)13が出力するモードフラグも変化する。
直流電圧指令値生成器(Vdc ref maker)13によって直流電圧指令値(Vdc*)を設定することから、直流電圧指令値生成器(Vdc ref maker)13は、直流電圧を制御する電力変換器4の制御周期で演算するのが望ましい。また、モードフラグFlag(B)が電力変換器3の駆動信号生成装置(PWM)12に入力されることから、電力変換器4の制御周期数は、電力変換器3の制御周期数の整数倍であり、かつ、同期していることが望ましい。これによって、直流電圧指令値生成機(Vdc ref maker)13が電力変換器3,4と共に同期して指令値更新を実施することができる。
駆動信号生成装置(PWM)12は、直流電圧指令値生成器(Vdc ref maker)13によってモードフラグがセットされた場合、入力である電圧指令値(Vk*(k=u,v,w))のうち、最大電圧相の駆動信号を直流電圧正極側に導通するように該当する相の駆動信号を設定し、かつ、最小電圧相の駆動信号を直流電圧負極側に導通するように該当する相の駆動信号を設定する。
中間の電圧となる相は、前述の三角波比較法による駆動信号生成方法によれば、直流電圧の検出値もしくは指令値によってスケーリングされたキャリア信号と大小比較を実施し、指令値がキャリア信号より大きければ、直流電圧正極側に導通するように該当する相の駆動信号を設定し、逆に指令値がキャリア信号より小さければ、直流電圧負極側に導通するように該当する相の駆動信号を設定する。モードフラグがセットされていない場合は、三相全て、前述の中間の電圧となる相の場合と同様の扱いによって駆動信号を設定しても良く、これは通常のPWM駆動信号を設定するロジックである。また、特許文献1に示される二相スイッチング等によってスイッチング回数を低減することができるロジックを用いても良い。
図6に前述のFlag(A)がセットされた場合の駆動信号生成装置(PWM)12による半導体スイッチング素子の駆動信号の生成概要を示す。例えば、図6中の網掛け部の区間での動作は、入力である電圧指令値(Vk*(k=u,v,w))のうち、u相が区間中の最大電圧相であり、u相上側の半導体スイッチング素子に導通(On)、u相下側の半導体スイッチング素子に非導通(Off)の駆動信号を生成し、u相を直流電圧正極側に導通させる。また、同様にw相が区間中の最小電圧相であり、w相上側の半導体スイッチング素子に非導通(Off)、w相下側の半導体スイッチング素子に導通(On)の駆動信号を生成し、w相を直流電圧負極側に導通させる。
これよってw相-u相の相間電圧は区間中、直流電圧Vdcが出力され、Vdcが直流電圧自動制御装置(DC-AVR)によって直流電圧指令値Vdc*に制御されれば、w相-u相の相間電圧は所定の交流電圧を生成する。さらに、区間中で中間電圧となるv相は、直流電圧Vdcを基準としてVv*を時間平均として出力するように、前述の三角波比較法によって生成した駆動信号で駆動する。これによって、v相−w相の相間電圧,u相−v相の相間電圧は所定の交流電圧となり、相間電圧が三相交流電圧となる電圧出力が得られる。
以上によって、直流電圧を電力変換器3,4の動作に必要とする最大の電圧に追随するように制御し、かつ、出力三相交流電圧の大きい方の電力変換器の交流電圧の出力の一部を直流電圧の周期的な更新によって代用するように、半導体スイッチング素子の駆動信号を生成することで、図6の各区間それぞれにおいて、単一の相のみスイッチング動作させることで、所定の交流電圧を出力することができ、これによって、半導体スイッチング素子のスイッチング回数を低減することで損失を低減し、高効率な電力変換が可能となる。
さらに、直流電圧指令値生成器(Vdc ref maker)13に、直流電圧検出器により検出した直流電圧検出値(Vdc)を入力として追加しても良い。追加した入力の検出値(Vdc)と式(1)によって算出される指令値(Vdc*)の偏差の絶対値が所定の値以上である場合は、モードフラグFlag(A),Flag(B)のどちらもセットしないモードを設けても良い。これによって、電力変換器3,4どちらの駆動信号においても、電圧指令値の最大電圧相の駆動信号を直流電圧正極側に導通するように該当する相の駆動信号を設定し、かつ、最小電圧相の駆動信号を直流電圧負極側に導通するように該当する相の駆動信号を設定することを防止することができる。
これによって、直流電圧の周期的な変更で、交流出力の一部を代替した場合に実現できる交流電圧出力が、通常通り三相ともスイッチング動作させた場合に実現できる交流電圧出力から、大きく乖離し過ぎないようにできる。
また、直流電圧指令値生成器(Vdc ref maker)13に入力される制御(A)と制御(B)の電圧指令値(Vk*(k=u,v,w))によって算出される式(2)の物理量が所定の値より小さい場合に、モードフラグFlag(A),Flag(B)のどちらもセットしないモードを設けても良い。
これによって、一相変調が有効となる電力変換器が3側なのか4側なのかが、回転機の回転子回転速度によって頻繁に入れ換わるチャタリングを抑制でき、制御性能の安定化が望める。
さらに、直流電圧指令値生成器(Vdc ref maker)13に、入力フラグ(Flag)をもたせても良い。追加した入力フラグ(Flag)がセットされていない場合は、モードフラグFlag(A),Flag(B)のどちらもセットせず、かつ、式(1)によって決定される直流電圧指令値(Vdc*)を出力せず、予め定めた値を直流電圧指令値(Vdc*)として出力する。これによって、通常の動作となり、回転電機システムの起動時や直流電圧の周期的な変更で、交流出力の一部を代替した場合に、回転電機システムや周囲の回路に過電流や過電圧など故障誘発する動作に陥る可能性がある場合に通常動作を選択して運転を継続することができる。
図7を用いて、上記で説明した回転電機システムの代表的な制御方法を説明する。なお、制御の詳細については、図4のブロック図に従う。
電力変換器3(交流−直流電力変換器(A))において、交流側の有効電力指令値(P*),無効電力指令値(Q*),有効電力(P),無効電力(Q)を入力値として、有効電流指令値(Id*(A))および有効電流指令値(Iq*(A))を算出する。(ステップS1)
次に、有効電流指令値(Id*(A))および有効電流指令値(Iq*(A))から電流指令値(Idq*(A))を算出し、電流指令値(Idq*(A))および検出したIdq(A)から電圧指令値(Vdq*)(A)を算出する。(ステップS2)
続いて、電圧指令値(Vdq*)(A)から電圧指令値(Vk*(k=u,v,w))(A)を算出する。(ステップS3)
続いて、電圧指令値(Vk*(k=u,v,w))(A)の最大値と最小値の偏差の絶対値を算出する。(ステップS4)
同様に、電力変換器4(交流−直流電力変換器(B))において、直流側の電圧指令値(Vdc*),直流電圧検出値(Vdc),交流側の無効電力指令値(Q*),無効電力(Q)から有効電流指令値(Id*(B))および有効電流指令値(Iq*(B))を算出する。(ステップS5)
有効電流指令値(Id*(B))および有効電流指令値(Iq*(B))から電流指令値(Idq*(B))を算出し、電流指令値(Idq*(B))および検出したIdq(B)から電圧指令値(Vdq*)(B)を算出する。(ステップS6)
続いて、電圧指令値(Vdq*)(B)から電圧指令値(Vk*(k=u,v,w))(B)を算出する。(ステップS7)
続いて、電圧指令値(Vk*(k=u,v,w))(B)の最大値と最小値の偏差の絶対値を算出する。(ステップS8)
次に、電圧指令値(Vk*(k=u,v,w))(A)の最大値と最小値の偏差の絶対値(|ΔV(A)|)と、電圧指令値(Vk*(k=u,v,w))(B)の最大値と最小値の偏差の絶対値(|ΔV(B)|)を比較し大きい方を算出する。(ステップS9)
前述の算出値と直流側の電圧検出値(Vdc)との大小を比較する。(ステップS10)
また、電圧指令値(Vk*(k=u,v,w))(A)の最大値と最小値の偏差の絶対値(|ΔV(A)|)と、電圧指令値(Vk*(k=u,v,w))(B)の最大値と最小値の偏差の絶対値(|ΔV(B)|)の偏差の絶対値を算出する。(ステップS11)
そして、前述の算出値と設定値(所定値)との大小を比較する。(ステップS12)
ステップS10とステップS12の出力の理論積(ステップS13)が真の場合にステップS14へ移行し、絶対値(|ΔV(k)(k=A or B)|)の大きい方の交流−直流電力変換器の半導体スイッチング素子に対して、電圧指令値(Vk*(k=u,v,w))の最大値に該当する相の駆動信号を直流電圧正極側と導通させ、最小値に該当する相の駆動信号を直流電圧負極側と導通させる。(ステップS14)
一方、前述以外の場合にステップS15へ移行し、ふたつの電力変換器(交流−直流電力変換器(A)および交流−直流電力変換器(B))の三相全てをスイッチング駆動させる。(ステップS15)
以上、本発明の効果を発現するための直流電圧指令値生成器(Vdc ref maker)13の機能について詳述した。検出値や指令値に対する適切なフィルタ要素(遅れ要素)やホールド機能、各種リミッタ等は詳述しないが、通常の電力変換器を適切に制御するための機能要素を排除するものでない。
次に、有効電流指令値(Id*(A))および有効電流指令値(Iq*(A))から電流指令値(Idq*(A))を算出し、電流指令値(Idq*(A))および検出したIdq(A)から電圧指令値(Vdq*)(A)を算出する。(ステップS2)
続いて、電圧指令値(Vdq*)(A)から電圧指令値(Vk*(k=u,v,w))(A)を算出する。(ステップS3)
続いて、電圧指令値(Vk*(k=u,v,w))(A)の最大値と最小値の偏差の絶対値を算出する。(ステップS4)
同様に、電力変換器4(交流−直流電力変換器(B))において、直流側の電圧指令値(Vdc*),直流電圧検出値(Vdc),交流側の無効電力指令値(Q*),無効電力(Q)から有効電流指令値(Id*(B))および有効電流指令値(Iq*(B))を算出する。(ステップS5)
有効電流指令値(Id*(B))および有効電流指令値(Iq*(B))から電流指令値(Idq*(B))を算出し、電流指令値(Idq*(B))および検出したIdq(B)から電圧指令値(Vdq*)(B)を算出する。(ステップS6)
続いて、電圧指令値(Vdq*)(B)から電圧指令値(Vk*(k=u,v,w))(B)を算出する。(ステップS7)
続いて、電圧指令値(Vk*(k=u,v,w))(B)の最大値と最小値の偏差の絶対値を算出する。(ステップS8)
次に、電圧指令値(Vk*(k=u,v,w))(A)の最大値と最小値の偏差の絶対値(|ΔV(A)|)と、電圧指令値(Vk*(k=u,v,w))(B)の最大値と最小値の偏差の絶対値(|ΔV(B)|)を比較し大きい方を算出する。(ステップS9)
前述の算出値と直流側の電圧検出値(Vdc)との大小を比較する。(ステップS10)
また、電圧指令値(Vk*(k=u,v,w))(A)の最大値と最小値の偏差の絶対値(|ΔV(A)|)と、電圧指令値(Vk*(k=u,v,w))(B)の最大値と最小値の偏差の絶対値(|ΔV(B)|)の偏差の絶対値を算出する。(ステップS11)
そして、前述の算出値と設定値(所定値)との大小を比較する。(ステップS12)
ステップS10とステップS12の出力の理論積(ステップS13)が真の場合にステップS14へ移行し、絶対値(|ΔV(k)(k=A or B)|)の大きい方の交流−直流電力変換器の半導体スイッチング素子に対して、電圧指令値(Vk*(k=u,v,w))の最大値に該当する相の駆動信号を直流電圧正極側と導通させ、最小値に該当する相の駆動信号を直流電圧負極側と導通させる。(ステップS14)
一方、前述以外の場合にステップS15へ移行し、ふたつの電力変換器(交流−直流電力変換器(A)および交流−直流電力変換器(B))の三相全てをスイッチング駆動させる。(ステップS15)
以上、本発明の効果を発現するための直流電圧指令値生成器(Vdc ref maker)13の機能について詳述した。検出値や指令値に対する適切なフィルタ要素(遅れ要素)やホールド機能、各種リミッタ等は詳述しないが、通常の電力変換器を適切に制御するための機能要素を排除するものでない。
なお、本発明は上記した実施例に限定されるものではなく、様々な変形例が含まれる。例えば、上記した実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
1…電力系統
2…電力変換器
3…回転機側交流直流電力変換器(A)もくしは主発電機側電力変換器(A)
4…電力系統側交流直流電力変換器(B)もしくは補助発電機側電力変換器(B)
5…直流部平滑コンデンサ
6…電力変換器制御装置
7…永久磁石型回転機
8…二次励磁型回転機もしくは主発電機
9…ブラシとスリップリング
10…補助発電機(二次励磁型回転機)
11…三次高調波加算器
12…駆動信号生成装置(PWM)
13…直流電圧指令値生成器(Vdc ref maker)
Vdc…直流部平滑コンデンサ電圧検出装置及び電圧検出値
Id…有効電流
Iq…無効電流
DC-AVR…直流電圧自動制御装置
AC-ACR…自動電流制御装置
AC-APR…自動有効電力制御装置
AC-AQR…自動無効電力制御装置
SW Sig…半導体スイッチング素子の駆動信号
P…有効電力
Q…無効電力
*(上付き添え字)…それぞれ対応する物理量の指令値。
2…電力変換器
3…回転機側交流直流電力変換器(A)もくしは主発電機側電力変換器(A)
4…電力系統側交流直流電力変換器(B)もしくは補助発電機側電力変換器(B)
5…直流部平滑コンデンサ
6…電力変換器制御装置
7…永久磁石型回転機
8…二次励磁型回転機もしくは主発電機
9…ブラシとスリップリング
10…補助発電機(二次励磁型回転機)
11…三次高調波加算器
12…駆動信号生成装置(PWM)
13…直流電圧指令値生成器(Vdc ref maker)
Vdc…直流部平滑コンデンサ電圧検出装置及び電圧検出値
Id…有効電流
Iq…無効電流
DC-AVR…直流電圧自動制御装置
AC-ACR…自動電流制御装置
AC-APR…自動有効電力制御装置
AC-AQR…自動無効電力制御装置
SW Sig…半導体スイッチング素子の駆動信号
P…有効電力
Q…無効電力
*(上付き添え字)…それぞれ対応する物理量の指令値。
Claims (12)
- 第1の交流−直流電力変換器と、
直流側の同極性の端子同士を接続することで前記第1の交流−直流電力変換器に電気的に接続された第2の交流−直流電力変換器と、
前記第1の交流−直流電力変換器と前記第2の交流−直流電力変換器間の直流部に設けられた平滑コンデンサと、
前記第1の交流−直流電力変換器および前記第2の交流−直流電力変換器を制御する制御装置と、
前記第1の電力変換器または前記第2の電力変換器のうち、少なくとも一方の交流側端子に接続され、任意の回転速度で運転される回転機と、を備え、
前記制御装置は、前記回転機の回転速度に応じて、前記直流部の電圧値を制御することを特徴とする回転電機システム。 - 請求項1に記載の回転電機システムであって、
少なくとも前記第1の電力変換器の三相電圧指令値と前記第2の電力変換器の三相電圧指令値を入力とし、前記第1の電力変換器の三相電圧指令値の最大値と最小値の偏差の絶対値と、前記第2の電力変換器の三相電圧指令値の最大値と最小値の偏差の絶対値とを比較し、絶対値の大きい方の電力変換器の直流電圧を直流電圧指令値とする直流電圧指令値生成器と、
前記第1の電力変換器の半導体スイッチング素子の駆動信号を生成する第1の駆動信号生成器と、
前記第2の電力変換器の半導体スイッチング素子の駆動信号を生成する第2の駆動信号生成器と、を備え、
前記制御装置は、前記直流電圧指令値に基づき、前記絶対値の大きい方の電力変換器の半導体スイッチング素子に対し、三相電圧指令値の最大値に該当する相の駆動信号を直流電圧正極側と導通するように出力し、かつ、三相電圧指令値の最小値に該当する相の駆動信号を直流電圧負極側と導通するように出力することを特徴とする回転電機システム。 - 請求項2に記載の回転電機システムであって、
前記直流電圧指令値生成器は、検出器により検出した前記直流部の直流電圧検出値と前記直流電圧指令値とを比較し、前記直流電圧指令値が前記直流電圧検出値よりも大きい場合、前記第1の電力変換器および前記第2の電力変換器の三相全てがスイッチング駆動されるようにそれぞれの半導体スイッチング素子を制御することを特徴とする回転電機システム。 - 請求項3に記載の回転電機システムであって、
前記直流電圧指令値生成器は、前記第1の電力変換器の三相電圧指令値の最大値と最小値の偏差の絶対値と、前記第2の電力変換器の三相電圧指令値の最大値と最小値の偏差の絶対値との偏差の絶対値と、予め設定した所定値を比較し、その偏差の絶対値が前述の所定値よりも小さい場合に、前記第1の電力変換器および前記第2の電力変換器の三相全てがスイッチング駆動されるようにそれぞれの半導体スイッチング素子を制御することを特徴とする回転電機システム。 - 請求項2から4のいずれか1項に記載の回転電機システムであって、
前記第1の電力変換器および前記第2の電力変換器のうち、直流電圧を制御する一方の電力変換器の制御周波数が直流電圧の制御に関与しない他方の電力変換器の制御周波数の整数倍であり、かつ、前記第1の電力変換器および前記第2の電力変換器の制御周期が同期しており、
前記直流電圧指令値生成器は、前記直流電圧を制御する電力変換器の制御周波数に基づき制御されることを特徴とする回転電機システム。 - 請求項1から5のいずれか1項に記載の回転電機システムであって、
前記回転機は、永久磁石型回転機または二次励起回転機のいずれかであることを特徴とする回転電機システム。 - 直流側の同極性の端子同士を接続することで互いに電気的に接続された2つの交流−直流電力変換器を有する回転電機システムの制御方法であって、
回転機の回転速度に応じて、前記2つの交流−直流電力変換器間の直流電圧値を制御することを特徴とする回転電機システムの制御方法。 - 請求項7に記載の回転電機システムの制御方法であって、
前記2つの交流−直流電力変換器の三相電圧指令値を入力し、一方の電力変換器の三相電圧指令値の最大値と最小値の偏差の絶対値と、他方の電力変換器の三相電圧指令値の最大値と最小値の偏差の絶対値とを比較し、絶対値の大きい方の電力変換器の直流電圧を直流電圧指令値とし、
前記直流電圧指令値に基づき、前記絶対値の大きい方の電力変換器の半導体スイッチング素子に対し、三相電圧指令値の最大値に該当する相の駆動信号を直流電圧正極側と導通するように出力し、かつ、三相電圧指令値の最小値に該当する相の駆動信号を直流電圧負極側と導通するように出力することを特徴とする回転電機システムの制御方法。 - 請求項8に記載の回転電機システムの制御方法であって、
検出器により検出した直流電圧検出値と前記直流電圧指令値とを比較し、前記直流電圧指令値が前記直流電圧検出値よりも大きい場合、前記2つの交流−直流電力変換器の三相全てがスイッチング駆動されるように制御することを特徴とする回転電機システムの制御方法。 - 請求項9に記載の回転電機システムの制御方法であって、
前記第1の電力変換器の三相電圧指令値の最大値と最小値の偏差の絶対値と、前記第2の電力変換器の三相電圧指令値の最大値と最小値の偏差の絶対値との偏差の絶対値と、予め設定した所定値を比較し、その偏差の絶対値が前述の所定値よりも小さい場合に、前記2つの交流−直流電力変換器の三相全てがスイッチング駆動されるように制御することを特徴とする回転電機システムの制御方法。 - 請求項8から10のいずれか1項に記載の回転電機システムの制御方法であって、
前記2つの交流−直流電力変換器のうち、直流電圧を制御する一方の電力変換器の制御周波数が直流電圧の制御に関与しない他方の電力変換器の制御周波数の整数倍であり、かつ、前記2つの交流−直流電力変換器の制御周期が同期しており、
前記直流電圧を制御する電力変換器の制御周波数に基づき制御することを特徴とする回転電機システムの制御方法。 - 請求項7から11のいずれか1項に記載の回転電機システムの制御方法であって、
前記回転機は、永久磁石型回転機または二次励起回転機のいずれかであることを特徴とする回転電機システムの制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016080131A JP2017192207A (ja) | 2016-04-13 | 2016-04-13 | 回転電機システムおよび回転電機システムの制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016080131A JP2017192207A (ja) | 2016-04-13 | 2016-04-13 | 回転電機システムおよび回転電機システムの制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017192207A true JP2017192207A (ja) | 2017-10-19 |
Family
ID=60085130
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016080131A Pending JP2017192207A (ja) | 2016-04-13 | 2016-04-13 | 回転電機システムおよび回転電機システムの制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017192207A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110943664A (zh) * | 2019-11-06 | 2020-03-31 | 东南大学 | 一种基于双层定位的五桥臂双动子初级永磁直线电机模型预测电流控制方法 |
| CN114337467A (zh) * | 2021-12-23 | 2022-04-12 | 昂宝电子(上海)有限公司 | 用于调整电机转速的方法及计算机存储介质 |
-
2016
- 2016-04-13 JP JP2016080131A patent/JP2017192207A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110943664A (zh) * | 2019-11-06 | 2020-03-31 | 东南大学 | 一种基于双层定位的五桥臂双动子初级永磁直线电机模型预测电流控制方法 |
| CN110943664B (zh) * | 2019-11-06 | 2021-07-20 | 东南大学 | 一种基于双层定位的五桥臂双动子初级永磁直线电机模型预测电流控制方法 |
| CN114337467A (zh) * | 2021-12-23 | 2022-04-12 | 昂宝电子(上海)有限公司 | 用于调整电机转速的方法及计算机存储介质 |
| CN114337467B (zh) * | 2021-12-23 | 2024-01-12 | 昂宝电子(上海)有限公司 | 用于调整电机转速的方法及计算机存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111434028B (zh) | 旋转电机控制装置 | |
| RU2525863C1 (ru) | Система преобразования мощности | |
| JP5862125B2 (ja) | 電力変換装置の制御装置 | |
| US9531317B2 (en) | Power conversion apparatus, power conversion method, and motor system | |
| US10483899B2 (en) | Modulation scheme for multiphase machines | |
| US8941350B2 (en) | Power conversion apparatus, power conversion method, motor system, and two-phase induction motor | |
| JP7135604B2 (ja) | 回転電機制御装置 | |
| JP6428491B2 (ja) | 回転電機の制御装置 | |
| KR102009512B1 (ko) | 3상 인버터의 옵셋 전압 생성 장치 및 방법 | |
| US10056826B2 (en) | Direct-current power supply device for controlling at frequency being 3N times frequency of three-phase alternating current and refrigeration-cycle applied device including the same | |
| JP2014003783A (ja) | 電力変換器制御装置および多重巻線型電動機駆動装置 | |
| CN107710596B (zh) | 旋转电机控制装置 | |
| JP2018098872A (ja) | 回転電機の制御装置、及び、回転電機システム | |
| JP7169595B2 (ja) | 回転電機制御装置 | |
| WO2014141441A1 (ja) | 電流形電力変換装置 | |
| US9543849B2 (en) | Power conversion apparatus, power conversion method, motor system, and three-phase motor | |
| JP2017192207A (ja) | 回転電機システムおよび回転電機システムの制御方法 | |
| JP2016220324A (ja) | マトリクスコンバータ、発電システム、制御装置および制御方法 | |
| JP2012070497A (ja) | インバータ装置及び制御方法 | |
| JP6203418B2 (ja) | 電力変換装置およびその制御方法、電動パワーステアリングの制御装置 | |
| KR102269005B1 (ko) | 발전기 시스템 | |
| WO2019038814A1 (ja) | 電力変換装置および電動パワーステアリング装置 | |
| US11482963B2 (en) | Inverter control device | |
| KR101972874B1 (ko) | 전동기 구동 제어 장치 및 전동기 구동 제어 방법 | |
| JP2014054037A (ja) | 一相変調式の可変速モータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190123 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191203 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200602 |