JP2017191033A - Mimoレーダ装置及び車両 - Google Patents
Mimoレーダ装置及び車両 Download PDFInfo
- Publication number
- JP2017191033A JP2017191033A JP2016081205A JP2016081205A JP2017191033A JP 2017191033 A JP2017191033 A JP 2017191033A JP 2016081205 A JP2016081205 A JP 2016081205A JP 2016081205 A JP2016081205 A JP 2016081205A JP 2017191033 A JP2017191033 A JP 2017191033A
- Authority
- JP
- Japan
- Prior art keywords
- radar apparatus
- antenna
- array antenna
- mimo radar
- mimo
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000013598 vector Substances 0.000 claims description 49
- 239000011159 matrix material Substances 0.000 claims description 31
- 230000005540 biological transmission Effects 0.000 description 35
- 238000000034 method Methods 0.000 description 15
- 238000010586 diagram Methods 0.000 description 9
- 230000014509 gene expression Effects 0.000 description 9
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 3
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 3
- 239000004810 polytetrafluoroethylene Substances 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 230000009466 transformation Effects 0.000 description 3
- 230000003321 amplification Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 230000001151 other effect Effects 0.000 description 2
- 230000017105 transposition Effects 0.000 description 2
- 238000003491 array Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- -1 polytetrafluoroethylene Polymers 0.000 description 1
- 230000008707 rearrangement Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/03—Details of HF subsystems specially adapted therefor, e.g. common to transmitter and receiver
- G01S7/032—Constructional details for solid-state radar subsystems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/27—Adaptation for use in or on movable bodies
- H01Q1/32—Adaptation for use in or on road or rail vehicles
- H01Q1/3208—Adaptation for use in or on road or rail vehicles characterised by the application wherein the antenna is used
- H01Q1/3233—Adaptation for use in or on road or rail vehicles characterised by the application wherein the antenna is used particular used as part of a sensor or in a security system, e.g. for automotive radar, navigation systems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q21/00—Antenna arrays or systems
- H01Q21/0006—Particular feeding systems
- H01Q21/0025—Modular arrays
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q21/00—Antenna arrays or systems
- H01Q21/06—Arrays of individually energised antenna units similarly polarised and spaced apart
- H01Q21/08—Arrays of individually energised antenna units similarly polarised and spaced apart the units being spaced along or adjacent to a rectilinear path
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q21/00—Antenna arrays or systems
- H01Q21/28—Combinations of substantially independent non-interacting antenna units or systems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q5/00—Arrangements for simultaneous operation of antennas on two or more different wavebands, e.g. dual-band or multi-band arrangements
- H01Q5/40—Imbricated or interleaved structures; Combined or electromagnetically coupled arrangements, e.g. comprising two or more non-connected fed radiating elements
- H01Q5/42—Imbricated or interleaved structures; Combined or electromagnetically coupled arrangements, e.g. comprising two or more non-connected fed radiating elements using two or more imbricated arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93272—Sensor installation details in the back of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93274—Sensor installation details on the side of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93275—Sensor installation details in the bumper area
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Computer Security & Cryptography (AREA)
- Variable-Direction Aerials And Aerial Arrays (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
【解決手段】L個(L≧2)の複数のアンテナ素子が第1のルールにより一方向に配置される第1のアレーアンテナと、M個(M≧2)の複数のアンテナ素子が第2のルールにより前記第1のアレーアンテナと同一の方向に配置されるとともに当該複数のアンテナ素子の内、少なくとも2つのアンテナ素子が当該第1のアレーアンテナを挟んで設けられる第2のアレーアンテナと、を備える、MIMOレーダ装置が提供される。
【選択図】図1
Description
1.本開示の実施の形態
1.1.MIMOレーダ装置の構成例
1.2.MIMOレーダ装置の動作例
1.3.MIMOレーダ装置の変形例
2.まとめ
[1.1.MIMOレーダ装置の構成例]
まず、図面を参照しながら本開示の実施の形態に係るMIMOレーダ装置の構成例を説明する。
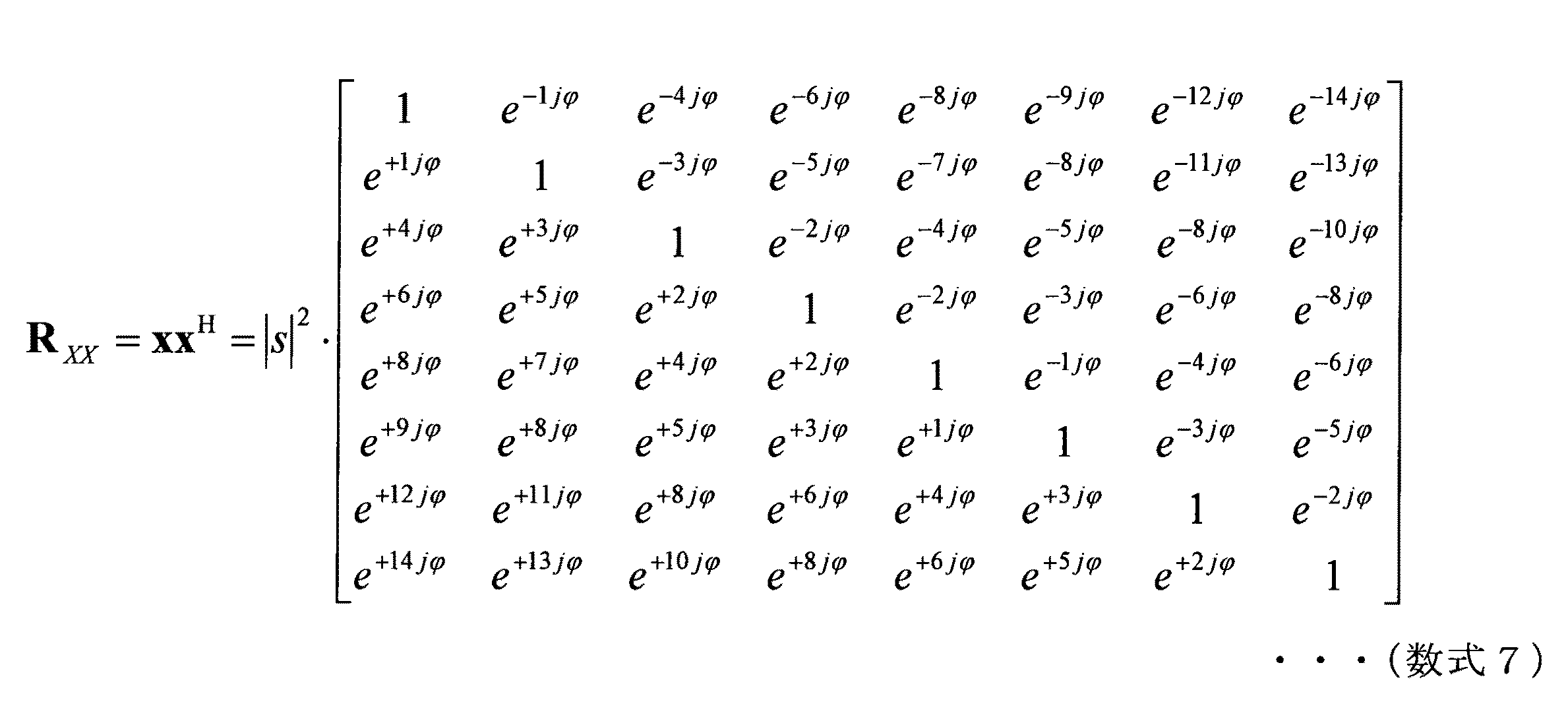
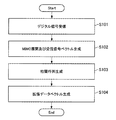
図4は、本開示の実施の形態に係るMIMOレーダ装置1の動作例を説明する流れ図である。図4に示したのは、本開示の実施の形態に係るMIMOレーダ装置1が備えている信号処理装置100の動作例である。以下、図4を用いて本開示の実施の形態に係るMIMOレーダ装置1の動作例について説明する。
続いて、本開示の実施の形態に係るMIMOレーダ装置1の変形例を説明する。
以上説明したように、本開示の実施の形態によれば、複数のアンテナ素子からなり、完全ゴロム定規、等間隔、2レベルNested Arrayなどの所定のルールによって当該アンテナ素子が配置される第1のアレーアンテナと、複数のアンテナ素子からなり、当該複数のアンテナ素子の内、少なくとも2つのアンテナ素子が当該第1のアレーアンテナを挟んで設けられる第2のアレーアンテナと、を備える、MIMOレーダ装置が提供される。
(1)
L個(L≧2)の複数のアンテナ素子が第1のルールにより一方向に配置される第1のアレーアンテナと、
M個(M≧2)の複数のアンテナ素子が第2のルールにより前記第1のアレーアンテナと同一の方向に配置されるとともに当該複数のアンテナ素子の内、少なくとも2つのアンテナ素子が当該第1のアレーアンテナを挟んで設けられる第2のアレーアンテナと、
を備える、MIMOレーダ装置。
(2)
前記第1のルールは、完全ゴロム定規の位置に従って配置されることである、前記(1)に記載のMIMOレーダ装置。
(3)
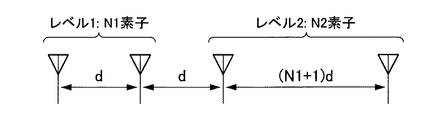
前記第1のルールは、2レベルNested Arrayに従って配置されることである、前記(1)に記載のMIMOレーダ装置。
(4)
前記第1のルールは、等間隔に配置されることである、前記(1)に記載のMIMOレーダ装置。
(5)
前記第2のルールは、前記第1のアレーアンテナを挟むアンテナ素子の間隔に上限が設けられることである、前記(1)〜(4)のいずれかに記載のMIMOレーダ装置。
(6)
前記上限は、前記第1のアレーアンテナまたは前記第2のアレーアンテナが等間隔にアンテナ素子を設けた場合と等価となるための上限である、前記(5)に記載のMIMOレーダ装置。
(7)
前記第1のアレーアンテナまたは前記第2のアレーアンテナのいずれかがレーダ信号を送信し、他方がレーダエコー信号を受信する、前記(1)〜(6)のいずれかに記載のMIMOレーダ装置。
(8)
受信した前記レーダエコー信号に対する信号処理を行う信号処理部をさらに備える、前記(7)に記載のMIMOレーダ装置。
(9)
前記信号処理部は、前記レーダエコー信号からL×M個のMIMO展開された受信信号ベクトルを生成する展開部と、
前記展開部が生成した受信信号ベクトルから、L×M行、L×M列の相関行列を生成する相関行列生成部と、
前記相関行列の要素を拡張データベクトルにマッピングする拡張データ生成部と、
を含む、前記(8)に記載のMIMOレーダ装置。
(10)
第1のアレーアンテナに含まれるL個(L≧2)の複数のアンテナ素子のアンテナ端子が一辺に設けられ、第2のアレーアンテナに含まれるM個(M≧2)の複数のアンテナ素子のアンテナ端子が、前記一辺に直交する両側の辺に設けられる信号処理装置を備える、MIMOレーダ装置。
(11)
前記(1)〜(10)のいずれかに記載のMIMOレーダ装置を備える、車両。
10 受信アレーアンテナ
20 送信アレーアンテナ
Claims (11)
- L個(L≧2)の複数のアンテナ素子が第1のルールにより一方向に配置される第1のアレーアンテナと、
M個(M≧2)の複数のアンテナ素子が第2のルールにより前記第1のアレーアンテナと同一の方向に配置されるとともに当該複数のアンテナ素子の内、少なくとも2つのアンテナ素子が当該第1のアレーアンテナを挟んで設けられる第2のアレーアンテナと、
を備える、MIMOレーダ装置。 - 前記第1のルールは、完全ゴロム定規の位置に従って配置されることである、請求項1に記載のMIMOレーダ装置。
- 前記第1のルールは、2レベルNested Arrayに従って配置されることである、請求項1に記載のMIMOレーダ装置。
- 前記第1のルールは、等間隔に配置されることである、請求項1に記載のMIMOレーダ装置。
- 前記第2のルールは、前記第1のアレーアンテナを挟むアンテナ素子の間隔に上限が設けられることである、請求項1に記載のMIMOレーダ装置。
- 前記上限は、前記第1のアレーアンテナまたは前記第2のアレーアンテナが等間隔にアンテナ素子を設けた場合と等価となるための上限である、請求項5に記載のMIMOレーダ装置。
- 前記第1のアレーアンテナまたは前記第2のアレーアンテナのいずれかがレーダ信号を送信し、他方がレーダエコー信号を受信する、請求項1に記載のMIMOレーダ装置。
- 受信した前記レーダエコー信号に対する信号処理を行う信号処理部をさらに備える、請求項7に記載のMIMOレーダ装置。
- 前記信号処理部は、前記レーダエコー信号からL×M個のMIMO展開された受信信号ベクトルを生成する展開部と、
前記展開部が生成した受信信号ベクトルから、L×M行、L×M列の相関行列を生成する相関行列生成部と、
前記相関行列の要素を拡張データベクトルにマッピングする拡張データ生成部と、
を含む、請求項8に記載のMIMOレーダ装置。 - 第1のアレーアンテナに含まれるL個(L≧2)の複数のアンテナ素子のアンテナ端子が一辺に設けられ、第2のアレーアンテナに含まれるM(M≧2)個の複数のアンテナ素子のアンテナ端子が、前記一辺に直交する両側の辺に設けられる信号処理装置を備える、MIMOレーダ装置。
- 請求項1に記載のMIMOレーダ装置を備える、車両。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081205A JP6801214B2 (ja) | 2016-04-14 | 2016-04-14 | Mimoレーダ装置及び車両 |
| CN202111081396.3A CN113608173B (zh) | 2016-04-14 | 2017-04-07 | Mimo雷达装置和车辆 |
| EP17719019.6A EP3443617A1 (en) | 2016-04-14 | 2017-04-07 | Mimo radar device and vehicle |
| PCT/JP2017/014576 WO2017179515A1 (en) | 2016-04-14 | 2017-04-07 | Mimo radar device and vehicle |
| CN201780013487.9A CN108701907B (zh) | 2016-04-14 | 2017-04-07 | Mimo雷达装置、车辆及天线系统 |
| US16/078,772 US10942268B2 (en) | 2016-04-14 | 2017-04-07 | MIMO radar device and vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081205A JP6801214B2 (ja) | 2016-04-14 | 2016-04-14 | Mimoレーダ装置及び車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017191033A true JP2017191033A (ja) | 2017-10-19 |
| JP6801214B2 JP6801214B2 (ja) | 2020-12-16 |
Family
ID=58609937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016081205A Expired - Fee Related JP6801214B2 (ja) | 2016-04-14 | 2016-04-14 | Mimoレーダ装置及び車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10942268B2 (ja) |
| EP (1) | EP3443617A1 (ja) |
| JP (1) | JP6801214B2 (ja) |
| CN (2) | CN108701907B (ja) |
| WO (1) | WO2017179515A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020020697A (ja) * | 2018-08-01 | 2020-02-06 | 株式会社デンソーテン | 到来方向推定装置及び到来方向推定方法 |
| CN111278089A (zh) * | 2019-01-08 | 2020-06-12 | 维沃移动通信有限公司 | 一种天线面板控制方法、终端设备及网络侧设备 |
| US11069987B2 (en) | 2018-06-07 | 2021-07-20 | Denso Ten Limited | Radar device |
| JP2021139762A (ja) * | 2020-03-05 | 2021-09-16 | 株式会社東芝 | レーダ装置及び送受信方法 |
| JP7545568B2 (ja) | 2020-07-29 | 2024-09-04 | ヴァレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハー | レーダシステム、レーダシステムのためのアンテナアレイ、少なくとも1つのレーダシステムを備える車両、及び少なくとも1つのレーダシステムを操作するための方法 |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3545334B1 (en) * | 2016-12-05 | 2024-12-04 | Echodyne Corp. | Antenna subsystem with analog beam-steering transmit array and digital beam-forming receive array |
| US11879989B2 (en) | 2016-12-05 | 2024-01-23 | Echodyne Corp. | Antenna subsystem with analog beam-steering transmit array and sparse hybrid analog and digital beam-steering receive array |
| WO2018196001A1 (en) * | 2017-04-28 | 2018-11-01 | SZ DJI Technology Co., Ltd. | Sensing assembly for autonomous driving |
| US10670712B2 (en) * | 2018-01-04 | 2020-06-02 | Analog Devices, Inc. | Methods and apparatus for a MIMO radar |
| CN108445478A (zh) * | 2018-03-23 | 2018-08-24 | 加特兰微电子科技(上海)有限公司 | 一种车用毫米波角雷达系统 |
| CN108196255A (zh) * | 2018-03-23 | 2018-06-22 | 加特兰微电子科技(上海)有限公司 | 一种车用毫米波雷达系统 |
| KR102099388B1 (ko) * | 2018-05-08 | 2020-04-09 | 서울대학교산학협력단 | 안테나 어레이 외삽을 이용한 레이더 수신신호의 도착방향 추정 방법 및 장치 |
| DE102018124503A1 (de) * | 2018-10-04 | 2020-04-09 | HELLA GmbH & Co. KGaA | Radarsystem für ein Fahrzeug |
| SG11202111694WA (en) | 2019-04-26 | 2021-11-29 | Beijing Xiaomi Mobile Software Co Ltd | Antenna panel application method, apparatus and storage medium |
| JP2020179808A (ja) * | 2019-04-26 | 2020-11-05 | トヨタ自動車株式会社 | 車両制御装置 |
| JP7012903B2 (ja) * | 2019-05-17 | 2022-01-28 | 三菱電機株式会社 | アンテナ装置及びレーダ装置 |
| US10812154B1 (en) | 2019-10-22 | 2020-10-20 | Semiconductor Components Industries, Llc | MIMO radar with receive antenna multiplexing |
| DE102019133977A1 (de) * | 2019-12-11 | 2021-06-17 | Valeo Schalter Und Sensoren Gmbh | Verfahren zur Ermittlung von wenigstens einer Objektinformation wenigstens eines Objektes, das mit einem Radarsystem erfasst wird und Radarsystem |
| DE102020119934A1 (de) | 2020-07-29 | 2022-02-03 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Betreiben eines Radarsystems, Radarsystem und Fahrzeug mit wenigstens einem Radarsystem |
| IL278386B (en) * | 2020-10-29 | 2022-07-01 | Navigicom Ltd | System and method for determining location data |
| CN112834988B (zh) * | 2021-02-08 | 2023-02-17 | 上海保隆汽车科技股份有限公司 | 一种车载mimo雷达天线布局结构 |
| CN113437467B (zh) * | 2021-06-16 | 2023-01-31 | 重庆市计量质量检测研究院 | 一种应用于5g通讯的车载mimo天线阵列 |
| IL289661A (en) * | 2022-01-06 | 2023-08-01 | Arbe Robotics Ltd | Extended virtual array with mimo car radar |
| US11545746B1 (en) * | 2022-03-18 | 2023-01-03 | UTVATE Corporation | Antenna lattice with unequal spacing for single-panel full-duplex satellite user terminals |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007286033A (ja) * | 2006-03-23 | 2007-11-01 | Omron Corp | 電波探知装置および方法 |
| JP2008304417A (ja) * | 2007-06-11 | 2008-12-18 | Mitsubishi Electric Corp | レーダ装置 |
| DE202009003983U1 (de) * | 2009-03-24 | 2009-08-13 | Püschel, Dirk, Dr. | Sender- bzw. Sensoranordnung zur Erzielung optimierter Richtcharakteristik für Sende- oder Empfangsvorrichtungen in zwei oder drei Dimensionen |
| JP2014179985A (ja) * | 2013-03-13 | 2014-09-25 | Intel Corp | サブアレイを有する単一パッケージフェイズドアレイモジュール |
| JP2014529076A (ja) * | 2011-09-09 | 2014-10-30 | アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング | アンテナ開口の合成的拡大と二次元ビーム・スイープをともなうイメージング・レーダセンサ |
| JP2015532811A (ja) * | 2012-09-04 | 2015-11-12 | バヤール イメージング リミテッド | 異種アンテナアレイを有する広帯域レーダ |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NO921193D0 (no) * | 1992-03-26 | 1992-03-26 | Susar As | System for paavisning, maaling og klassifisering av luftfenomener |
| US6104349A (en) * | 1995-08-09 | 2000-08-15 | Cohen; Nathan | Tuning fractal antennas and fractal resonators |
| US6667724B2 (en) * | 2001-02-26 | 2003-12-23 | Time Domain Corporation | Impulse radar antenna array and method |
| US6963727B2 (en) * | 2001-07-26 | 2005-11-08 | Time Domain Corporation | Direct-path-signal detection apparatus and associated methods |
| US20030134664A1 (en) * | 2001-10-30 | 2003-07-17 | Gregory Zancewicz | System, Method, and apparatus for improving the performance of space division multiple access and other systems that shape antenna beams by employing postdetection polarimetric beamsteering and utilizing genetic algorithms to synthesize beams |
| US7015869B2 (en) * | 2002-11-18 | 2006-03-21 | Visteon Global Technologies, Inc. | High frequency antenna disposed on the surface of a three dimensional substrate |
| US8130857B2 (en) * | 2006-01-20 | 2012-03-06 | Qualcomm Incorporated | Method and apparatus for pilot multiplexing in a wireless communication system |
| CN101042435B (zh) * | 2006-03-23 | 2011-03-23 | 欧姆龙汽车电子株式会社 | 单脉冲式雷达装置 |
| US20120056780A1 (en) * | 2006-04-28 | 2012-03-08 | Paul Antonik | Method and apparatus for simultaneous synthetic aperture radar and moving target indication |
| EP2087610B1 (en) * | 2006-10-31 | 2015-09-09 | QUALCOMM Incorporated | Unified design and centralized scheduling for dynamic simo, su-mimo and mu-mimo operation for rl transmissions |
| US7920598B2 (en) * | 2007-05-25 | 2011-04-05 | Qualcomm Incorporated | Scrambling methods for synchronization channels |
| US7916096B2 (en) * | 2007-06-21 | 2011-03-29 | Delphi Technologies, Inc. | Communication system having configurable 3-D antenna grid and method for configuring the communication system |
| US8358559B2 (en) * | 2009-10-23 | 2013-01-22 | Texas Instruments Incorporated | System and method for imaging |
| KR101137088B1 (ko) * | 2010-01-06 | 2012-04-19 | 주식회사 만도 | 통합 레이더 장치 및 통합 안테나 장치 |
| JP5631763B2 (ja) | 2010-08-23 | 2014-11-26 | 株式会社東芝 | Mimoレーダシステム、送信装置、受信装置及びmimoレーダ信号処理方法 |
| FR2988858B1 (fr) * | 2012-03-30 | 2016-12-23 | Thales Sa | Dispositif de detection electromagnetique actif et passif a faible probabilite d'interception |
| JP2014173940A (ja) | 2013-03-07 | 2014-09-22 | Toshiba Corp | 分散開口レーダ装置及びレーダ信号処理方法 |
| CN103984836B (zh) * | 2014-05-30 | 2017-06-23 | 电子科技大学 | 一种3d‑mimo天线极化增益的联合存储方法 |
-
2016
- 2016-04-14 JP JP2016081205A patent/JP6801214B2/ja not_active Expired - Fee Related
-
2017
- 2017-04-07 WO PCT/JP2017/014576 patent/WO2017179515A1/en active Application Filing
- 2017-04-07 CN CN201780013487.9A patent/CN108701907B/zh active Active
- 2017-04-07 CN CN202111081396.3A patent/CN113608173B/zh active Active
- 2017-04-07 EP EP17719019.6A patent/EP3443617A1/en active Pending
- 2017-04-07 US US16/078,772 patent/US10942268B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007286033A (ja) * | 2006-03-23 | 2007-11-01 | Omron Corp | 電波探知装置および方法 |
| JP2008304417A (ja) * | 2007-06-11 | 2008-12-18 | Mitsubishi Electric Corp | レーダ装置 |
| DE202009003983U1 (de) * | 2009-03-24 | 2009-08-13 | Püschel, Dirk, Dr. | Sender- bzw. Sensoranordnung zur Erzielung optimierter Richtcharakteristik für Sende- oder Empfangsvorrichtungen in zwei oder drei Dimensionen |
| JP2014529076A (ja) * | 2011-09-09 | 2014-10-30 | アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング | アンテナ開口の合成的拡大と二次元ビーム・スイープをともなうイメージング・レーダセンサ |
| JP2015532811A (ja) * | 2012-09-04 | 2015-11-12 | バヤール イメージング リミテッド | 異種アンテナアレイを有する広帯域レーダ |
| JP2014179985A (ja) * | 2013-03-13 | 2014-09-25 | Intel Corp | サブアレイを有する単一パッケージフェイズドアレイモジュール |
Non-Patent Citations (1)
| Title |
|---|
| 飯田 宗慶,外1名: ""アレーの自由度を超える入射波環境における到来方向推定法の一検討"", 2014年電子情報通信学会 総合大会 情報・システムソサイエティ特別企画 学生ポスターセッション予稿, JPN6020015287, 18 March 2014 (2014-03-18), pages 49, ISSN: 0004259524 * |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11069987B2 (en) | 2018-06-07 | 2021-07-20 | Denso Ten Limited | Radar device |
| JP2020020697A (ja) * | 2018-08-01 | 2020-02-06 | 株式会社デンソーテン | 到来方向推定装置及び到来方向推定方法 |
| JP7248970B2 (ja) | 2018-08-01 | 2023-03-30 | 株式会社デンソー | 到来方向推定装置及び到来方向推定方法 |
| CN111278089A (zh) * | 2019-01-08 | 2020-06-12 | 维沃移动通信有限公司 | 一种天线面板控制方法、终端设备及网络侧设备 |
| CN111278089B (zh) * | 2019-01-08 | 2021-10-12 | 维沃移动通信有限公司 | 一种天线面板控制方法、终端设备及网络侧设备 |
| US12095167B2 (en) | 2019-01-08 | 2024-09-17 | Vivo Mobile Communication Co., Ltd. | Antenna panel control method, terminal device, and network side device |
| JP2021139762A (ja) * | 2020-03-05 | 2021-09-16 | 株式会社東芝 | レーダ装置及び送受信方法 |
| JP7545568B2 (ja) | 2020-07-29 | 2024-09-04 | ヴァレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハー | レーダシステム、レーダシステムのためのアンテナアレイ、少なくとも1つのレーダシステムを備える車両、及び少なくとも1つのレーダシステムを操作するための方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6801214B2 (ja) | 2020-12-16 |
| CN108701907A (zh) | 2018-10-23 |
| WO2017179515A1 (en) | 2017-10-19 |
| CN113608173A (zh) | 2021-11-05 |
| CN108701907B (zh) | 2021-10-01 |
| US20190049577A1 (en) | 2019-02-14 |
| EP3443617A1 (en) | 2019-02-20 |
| CN113608173B (zh) | 2024-03-19 |
| US10942268B2 (en) | 2021-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6801214B2 (ja) | Mimoレーダ装置及び車両 | |
| US20240377506A1 (en) | Radar device | |
| CN106546983B (zh) | 雷达装置 | |
| Yang et al. | A new nested MIMO array with increased degrees of freedom and hole-free difference coarray | |
| DK3266119T3 (en) | Beam forming using an antenna device | |
| JP6755121B2 (ja) | レーダ装置 | |
| CN106019240B (zh) | 雷达装置 | |
| JP6491254B2 (ja) | アンテナ装置及びレーダ装置 | |
| CN110967671A (zh) | 雷达装置、移动物体以及静止物体 | |
| CN109075427B (zh) | 使用天线装置的波束成形 | |
| Basikolo et al. | A novel mutual coupling compensation method for underdetermined direction of arrival estimation in nested sparse circular arrays | |
| JP2020521941A (ja) | アンテナ・アレイ | |
| CN102859794A (zh) | 具有稀疏占据的单元阵列的天线 | |
| CN104849696A (zh) | 一种mimo雷达天线阵稀疏布阵方法 | |
| EP2624475B1 (en) | Combined Power Transmission | |
| Patwari | Sparse linear antenna arrays: A review | |
| EP3078123B1 (en) | A node in a wireless communication system with four beam ports and corresponding method | |
| JP6499217B2 (ja) | アンテナ装置及びレーダ装置 | |
| JP7390658B2 (ja) | レーダ装置 | |
| WO2015092478A1 (en) | Digital beam-forming network having a reduced complexity and array antenna comprising the same | |
| Dong et al. | Minimum redundancy MIMO array synthesis by means of cyclic difference sets | |
| Zhu et al. | Joint Phased‐MIMO and Nested‐Array Beamforming for Increased Degrees‐of‐Freedom | |
| CN116195136A (zh) | 针对天线阵列的芯片配置 | |
| Dong et al. | Antenna array design in MIMO radar using cyclic difference sets and simulated annealing | |
| Liu et al. | An optimizing nested MIMO array with hole-free difference coarray |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190208 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20190214 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190222 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190325 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20190515 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200512 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200706 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200930 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201027 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201109 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6801214 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |