JP2017148037A - ヘッド装置及び移動装置 - Google Patents
ヘッド装置及び移動装置 Download PDFInfo
- Publication number
- JP2017148037A JP2017148037A JP2017024421A JP2017024421A JP2017148037A JP 2017148037 A JP2017148037 A JP 2017148037A JP 2017024421 A JP2017024421 A JP 2017024421A JP 2017024421 A JP2017024421 A JP 2017024421A JP 2017148037 A JP2017148037 A JP 2017148037A
- Authority
- JP
- Japan
- Prior art keywords
- head
- cylindrical
- plunger
- rod
- syringe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Abstract
【課題】吸引口を有するチップを用いた対象物の吸引及び吐出の作業を高度に自動化する。
【解決手段】対象物の吸引、及び吸引された対象物の吐出を行う吸引口を有するチップが装着されるチップ装着部と、上下方向への移動によって吸引口に吸引力又は吐出力を発生させる軸部材11と、を備えたヘッド10と、軸部材11を上下方向へ移動させる駆動力を発生する第1モータ31と、ヘッド10及び第1モータ31を保持するフレーム部材21と、フレーム部材21を上下方向へ移動させる駆動力を発生する第2モータ32と、第1モータ31の駆動を制御することによって軸部材11の上下方向の移動を制御すると共に、第2モータ32の駆動を制御することによってヘッド10の高さ位置を制御する制御部と、を備えるヘッド装置1。
【選択図】図2
【解決手段】対象物の吸引、及び吸引された対象物の吐出を行う吸引口を有するチップが装着されるチップ装着部と、上下方向への移動によって吸引口に吸引力又は吐出力を発生させる軸部材11と、を備えたヘッド10と、軸部材11を上下方向へ移動させる駆動力を発生する第1モータ31と、ヘッド10及び第1モータ31を保持するフレーム部材21と、フレーム部材21を上下方向へ移動させる駆動力を発生する第2モータ32と、第1モータ31の駆動を制御することによって軸部材11の上下方向の移動を制御すると共に、第2モータ32の駆動を制御することによってヘッド10の高さ位置を制御する制御部と、を備えるヘッド装置1。
【選択図】図2
Description
本発明は、例えば細胞凝集塊のような対象物の吸引、及び前記吸引した対象物の吐出を行うシリンダチップが装着されるヘッドを用いたヘッド装置及び対象物の移動装置に関する。
ある対象物を、一の容器から他の容器へ移動させる移動装置は、各種の技術分野において必要とされている。例えば、多数個の移動対象物、例えば小型部品、有機又は無機の破砕片や粒子、細胞等を貯留する第1容器と、前記移動対象物を受け入れる第2容器とが有る場合に、前記第1容器からいくつかの前記移動対象物を抽出し、これを前記第2容器に移動させる装置が挙げられる。このような移動装置には、前記第1容器からの対象物の吸引、及び前記吸引した対象物の前記第2容器への吐出を行う吸引チップが必要となる。
特許文献1には、細胞凝集塊を移動対象物とし、吸引チップ(マイクロピペット)を用いて分注用ウェルから前記細胞凝集塊を吸引し、これを細胞シャーレに吐出させる技術が開示されている。細胞凝集塊は、液体中に保持されており、前記吸引の際には前記吸引チップの先端開口部が前記液体中に浸漬される。このため、吸引チップは、1回の吸引及び吐出を終えた後、廃棄処分とせねばならない場合がある。
対象物の移動作業において、前記吸引チップを用いた対象物の吸引及び吐出を含む一連の動作を高度に自動化する要請がある。しかし、現状では、上記吸引チップを手動操作するか、或いは吸引力の発生機構だけを吸引チップに付設する程度の自動化しか進んでいない。従って、上記移動作業の作業効率は、現状において良いと言うことはできない。
本発明の目的は、吸引口を有するチップを用いた対象物の吸引、及び前記吸引した対象物の吐出の作業を高度に自動化できるヘッドを用いたヘッド装置及び対象物の移動装置を提供することにある。
本発明の一局面に係るヘッド装置は、対象物の吸引、及び吸引された前記対象物の吐出を行う吸引口を有するチップが装着されるチップ装着部と、上下方向への移動によって前記吸引口に吸引力又は吐出力を発生させる軸部材と、を備えたヘッドと、前記軸部材を上下方向へ移動させる駆動力を発生する第1モータと、前記ヘッド及び前記第1モータを保持するフレーム部材と、前記フレーム部材を上下方向へ移動させる駆動力を発生する第2モータと、前記第1モータの駆動を制御することによって前記軸部材の上下方向の移動を制御すると共に、前記第2モータの駆動を制御することによって前記ヘッドの高さ位置を制御する制御部と、を備える。
本発明の他の局面に係る移動装置は、上記のヘッド装置と、対象物を貯留する第1容器と、対象物を受け入れる第2容器と、前記ヘッド装置を前記第1容器と前記第2容器との間において水平方向に移動させるヘッド移動機構と、を備える。
本発明によれば、対象物の吸引及び吐出を行うチップを有するヘッドに、吸引力及び吐出力を発生させるための第1モータと、ヘッド自体を上下動させるための第2モータとが備えられているので、ヘッド単体での機能性を高めることができ、対象物の吸引及び吐出の作業における高度の自動化に寄与することができる。
以下、本発明に係るシリンダチップ装着用ヘッド及び該ヘッドを用いたヘッド装置の実施形態を、図面に基づいて詳細に説明する。
この実施形態においては、シリンダチップによる吸引及び吐出の対象物が生体由来の細胞、特に細胞凝集塊である場合について説明する。なお、対象物は細胞凝集塊に限られるものではなく、小型の電子部品や機械部品、有機又は無機の破砕片や粒子、ペレット等であっても良い。
図1は、本発明の実施形態に係るヘッド装置1の外観を、ユニットフレーム20に組み付けられた状態で示す斜視図である。図2(A)及び図2(B)は、ヘッド装置1の単体の斜視図、図3は、ヘッド装置1の側断面図である。ヘッド装置1は、シリンダチップ70が装着されるヘッド10と、ヘッド10を保持する第1フレーム21(フレーム部材)と、第1フレーム21が取り付けられ上下方向(Z方向)に移動する第2フレーム22と、第1フレーム21に搭載されヘッド10を駆動する第1モータ31(モータ)と、第2フレーム22をZ方向に移動させるボールねじ装置3Aとを備えている。このようなヘッド装置1の複数がユニットフレーム20に組み付けられることで、ヘッドユニットが構成される。
ヘッド10は、その下端にシリンダチップ70が取り付けられ、該シリンダチップ70に対象物の吸引及び吐出動作を行わせる。ヘッド10は、上下方向に移動する軸部材11と、軸部材11(第2ねじ軸12)の下端に取り付けられ軸部材11と一体的に上下方向に移動する第1筒状ロッド13と、第1筒状ロッド13を上下方向に移動可能に収容する不動の第2筒状ロッド14と、第1筒状ロッド13内に収容される吐出ロッド15とを含む。ヘッド10の詳細構造については、図7及び図8に基づき、後記で詳述する。
ユニットフレーム20は、YZ方向に延びる保持平面20Sを備えた平板状の金属フレームである。図1では、1個のヘッド装置1が組み付けられている状態を示しているが、本実施形態のユニットフレーム20は、4個のヘッド装置1をY方向に並列に並べて保持することが可能である。保持平面20Sの+Z方向の端部付近(上端付近)には、Y方向に延びるホルダー部201が突設されている。ホルダー部201は、Z方向に当該ホルダー部201を貫通する4個の貫通孔202を備える。この貫通孔202には、次述のねじ軸33の上端軸受け322が嵌め込まれ、且つ、上端軸受け322がビス止めにてホルダー部201に固定される。保持平面20Sの中央から−Z方向の端部付近(下端付近)には、Z方向に延びるガイドレール203が取り付けられている。ガイドレール203は、第1フレーム21のZ方向の移動をガイドするために配置されている。
ボールねじ装置3Aは、Z方向に配置された、第2モータ32、カップリング321、上端軸受け322、ねじ軸33及びナット部材34を含む。第2モータ32は、ねじ軸322を軸回りに正回転及び逆回転させる回転駆動力を発生するモータである。カップリング321は、第2モータの出力軸とねじ軸322の上端を連結する部材である。上端軸受け322は、ねじ軸33の上端を回転自在に支持する。上端軸受け322は、筒状部とフランジ部とを備え、前記筒状部が上述の貫通孔202に嵌め込まれ、前記フランジ部がホルダー部201の上面で保持される。ねじ軸33は、Z方向に延び、周面に雄ねじが刻まれている。ナット部材34は、雌ねじを内面に有し、ねじ軸33に螺合されている。ねじ軸33が正回転又は逆回転することで、ナット部材34は上方(+Z)又は下方(−Z)に移動する。
第1フレーム21は、第1モータ31を保持する役目、軸部材11の上端側軸受けを保持する役目、及び、第2筒状ロッド14を固定的に保持する役目を果たす。この第1フレーム21の詳細構造については、図7に基づき、後記で詳述する。
第2フレーム22は、Z方向に延びる垂直部221と、この垂直部221の上端から−X方向に突出する水平部222とを備えるL字型のフレームである。垂直部221の下端付近には、第1フレーム21が固定されている。水平部222にはZ方向の貫通孔が備えられ、ボールねじ装置3Aのナット部材34が、前記貫通孔に嵌め込まれた状態で水平部222に固定されている。従って、ねじ軸33が回転駆動され、ナット部材34が上方又は下方に移動すると、第2フレーム22及びこれに連結されている第1フレーム21も連動して上方又は下方に移動する。図2(A)は第1、第2フレーム21、22が上昇している状態を、図2(B)は下降している状態を各々示している。
水平部222の−X側端面には、ケーブルトレイ23が取り付けられている。ケーブルトレイ23は、第1モータ31の給電ケーブル24を保持している。給電ケーブル24の上端付近は、屈曲保護部材25で保護されている。屈曲保護部材25は上方に向けて凸に湾曲した部分であり、第2フレーム22の上下動に追従して変形する。この屈曲保護部材25の下端付近の垂直部分に対向して、Z軸センサ26が配置されている。Z軸センサ26は、第2フレーム22のZ方向位置、ひいてはヘッド10のZ方向位置を検知するためのセンサである。
続いて、本実施形態のヘッド10に装着されるシリンダチップ70について説明する。図4は、シリンダチップ70の断面図、図5は、シリンダチップ70の分解斜視図である。シリンダチップ70は、細胞凝集塊(対象物)の吸引経路となる管状通路71Pを内部に備えるシリンジ71と、管状通路71Pを画定するシリンジ71の内周壁と摺接しつつ管状通路71P内を進退移動するプランジャ72とを備える。
シリンジ71は、大径の円筒体からなるシリンジ基端部711と、細径で長尺の円筒体からなるシリンジ本体部712と、基端部711と本体部712とを繋ぐテーパ筒部713とを含む。管状通路71Pは、シリンジ本体部712に形成されている。シリンジ本体部712の先端には、吸引口71T(吐出口でもある)が設けられている。プランジャ72は、円筒体からなるプランジャ基端部721と、針状のプランジャ本体部722と、基端部721と本体部722とを繋ぐ半球部723とを含む。
シリンジ基端部711は、円筒型の中空部71Hを備えている。プランジャ基端部721の外径は、中空部71Hの内径よりも所定長だけ小さく設定されている。プランジャ本体部722の外径は、管状通路71Pの内径よりも僅かに小さく設定されている。また、テーパ筒部713の内周面の形状は、半球部723の外周面の曲面形状に合致している。プランジャ基端部721が中空部71H内に収容され、プランジャ本体部722がシリンジ本体部712の管状通路71Pに挿通される態様で、シリンジ71に対してプランジャ72が組み付けられている。
図5では、プランジャ72がシリンジ71から抜き出された状態を示しているが、図4では、プランジャ本体部722がシリンジ本体部712に最も深く挿通されている状態、つまりプランジャ72が最も下降した状態を示している。このとき、テーパ筒部713のキャビティに、半球部723が完全に受容された状態となる。プランジャ本体部722の長さは、シリンジ本体部712よりもやや長く、図4の状態では、吸引口71Tから先端部724が突出している。また、シリンジ基端部711の内周面とプランジャ基端部721の外周面との間にはギャップが存在している。
プランジャ72は、図4の状態から、シリンジ71に対して+Z方向(上方向)へ移動することができる。所定長だけ+Z方向にプランジャ72が移動すると、プランジャ本体部722の先端部724は管状通路71Pの内部に没する。この際、吸引口71Tに吸引力を発生させ、該吸引口71Tの周囲の液体(本実施形態では細胞培養液)を管状通路71P内へ吸引することができる。この吸引の後、プランジャ72を−Z方向(下側)へ移動させると、前記管状通路71P内へ吸引された液体を吸引口71Tから吐出させることができる。
プランジャ基端部721には、+Z方向の端面に開口を有する、円筒状の中空空間からなる装着孔72Hが備えられている。この装着孔72Hには、後述する吐出ロッド15のプランジャ装着部152が圧入される。該圧入によって、吐出ロッド15とプランジャ72とが一体化される。プランジャ基端部721の+Z方向端面は、第1筒状ロッド13の−Z方向端面と対向している。シリンジ基端部711の中空部71Hには、不動の第2筒状ロッド14のシリンジ装着部142が圧入される。
続いて、図6(A)〜(E)を参照して、シリンダチップ70による細胞凝集塊Cの吸引及び吐出動作を説明する。ここでは、シリンダチップ70にて、第1容器C1に貯留されている細胞培養液Lm1中に存在する細胞凝集塊Cを吸引し、第2容器C2に貯留されている細胞培養液Lm1中に当該細胞凝集塊Cを吐出する場合について説明する。
シリンダチップ70による細胞凝集塊Cの吸引乃至吐出動作は、次のステップ1〜6からなる。
[ステップ1]図6(A)に示すように、シリンダチップ70を吸引対象とする細胞凝集塊Cの真上に移動させる。
[ステップ2]プランジャ72がシリンジ71に対して相対的に上方(+Z方向)に移動しており、プランジャ本体部722の先端部724がシリンジ本体部712内に没入した状態であるときは、図6(B)に示すように、プランジャ72を最も下方(−Z方向)に移動させ、先端部724を吸引口71Tから突出させる。つまり、シリンジ本体部712の管状通路71P内に空気が存在しない状態とする。
[ステップ3]その後、図6(C)に示すように、シリンダチップ70を全体的に下降させ、吸引口71Tを第1容器C1の細胞培養液Lm1中に突入させる。このとき、なるべく吸引口71Tを細胞凝集塊Cに接近させる。
[ステップ4]続いて、図6(D)に示すように、プランジャ72を所定高さだけ上方へ移動させる。この動作により、吸引口71Tには吸引力が発生し、細胞凝集塊Cと一部の細胞培養液Lmaとがシリンジ本体部712内に吸引される。この状態で、シリンダチップ70は全体的に上昇され、第2容器C2の配置位置まで移動される。
[ステップ5]そして、図6(E)に示すように、吸引口71Tが第2容器C2の細胞培養液Lm2中に突入するまで、シリンダチップ70が全体的に下降される。しかる後、所定高さ位置にあるプランジャ72を、先端部724が吸引口71Tから突出するまで下降させる。この下降動作により、細胞凝集塊Cは第2容器C2の細胞培養液Lm2中に吐出される。
[ステップ6]図示は省略しているが、シリンダチップ70をヘッド10から離脱させる。これは、一度細胞培養液に浸漬されたシリンダチップ70は再利用できないケースが多く、新たなシリンダチップ70をヘッド10に再装着できるようにするためである。勿論、1回の使用毎にシリンダチップ70を交換せず、細胞の成分による汚濁で使用に支障が出るまでの複数回(例えば20〜30回の吸引及び吐出)だけ同一のシリンダチップ70を使用し、その後に当該シリンダチップ70をヘッド10から離脱させるようにしても良い。
[ステップ1]図6(A)に示すように、シリンダチップ70を吸引対象とする細胞凝集塊Cの真上に移動させる。
[ステップ2]プランジャ72がシリンジ71に対して相対的に上方(+Z方向)に移動しており、プランジャ本体部722の先端部724がシリンジ本体部712内に没入した状態であるときは、図6(B)に示すように、プランジャ72を最も下方(−Z方向)に移動させ、先端部724を吸引口71Tから突出させる。つまり、シリンジ本体部712の管状通路71P内に空気が存在しない状態とする。
[ステップ3]その後、図6(C)に示すように、シリンダチップ70を全体的に下降させ、吸引口71Tを第1容器C1の細胞培養液Lm1中に突入させる。このとき、なるべく吸引口71Tを細胞凝集塊Cに接近させる。
[ステップ4]続いて、図6(D)に示すように、プランジャ72を所定高さだけ上方へ移動させる。この動作により、吸引口71Tには吸引力が発生し、細胞凝集塊Cと一部の細胞培養液Lmaとがシリンジ本体部712内に吸引される。この状態で、シリンダチップ70は全体的に上昇され、第2容器C2の配置位置まで移動される。
[ステップ5]そして、図6(E)に示すように、吸引口71Tが第2容器C2の細胞培養液Lm2中に突入するまで、シリンダチップ70が全体的に下降される。しかる後、所定高さ位置にあるプランジャ72を、先端部724が吸引口71Tから突出するまで下降させる。この下降動作により、細胞凝集塊Cは第2容器C2の細胞培養液Lm2中に吐出される。
[ステップ6]図示は省略しているが、シリンダチップ70をヘッド10から離脱させる。これは、一度細胞培養液に浸漬されたシリンダチップ70は再利用できないケースが多く、新たなシリンダチップ70をヘッド10に再装着できるようにするためである。勿論、1回の使用毎にシリンダチップ70を交換せず、細胞の成分による汚濁で使用に支障が出るまでの複数回(例えば20〜30回の吸引及び吐出)だけ同一のシリンダチップ70を使用し、その後に当該シリンダチップ70をヘッド10から離脱させるようにしても良い。
以上のシリンダチップ70を用いたステップ1〜6を自動的に実行させる機能を、本実施形態のヘッド装置1(ヘッド10)は備えている。以下、ヘッド10の詳細構造について説明する。図7は、ヘッド10及びその近傍(第1フレーム21)の断面図、図8は、ヘッド10の分解斜視図である。
ヘッド10は、Z方向に配置された、軸部材11、第1筒状ロッド13、第2筒状ロッド14と、吐出ロッド15、連結片16、連結ピン17、コイルバネ18(弾性部材)及びストッパ19を備えている。第1フレーム21は、上下方向(Z方向)に延びる垂直フレーム211と、垂直フレーム211の上端に組み付けられ−X方向に突出する保持フレーム212と、保持フレーム212の上に組み付けられたモータ支持フレーム213と、垂直フレーム211の下端から−X方向に突出するロッド保持フレーム214とを備えている。
軸部材11は、外周面に雄ねじが刻まれたねじ軸であって、回転駆動力が与えられる第1ねじ軸11Aと、第1ねじ軸11Aに螺合される筒状の第2ねじ軸12とを含む。第2ねじ軸12は、第1ねじ軸11Aの前記雄ねじと係合する雌ねじが刻まれている上端部分121と、連結片16を介して第1筒状ロッド13が取り付けられる下端部122とを備える。第1ねじ軸11Aが軸回りに正回転又は逆回転することで、第2ねじ軸12は下方向(−Z方向)又は上方向(+Z方向)に移動する。第1ねじ軸11Aの上端部111は、軸受け311で回転自在に支持されている。また、第1ねじ軸11Aの最上端には、入力ギア312が取り付けられている。
第1モータ31は、第1ねじ軸11Aを軸回りに正回転又は逆回転させる回転駆動力を発生するモータであり、モータ支持フレーム213に搭載されている。第1モータ31の出力軸と入力ギア312との間には、ギアユニット313(伝達機構)が介在されている。前記回転駆動力は、ギアユニット313を通して入力ギア312に伝達され、第1ねじ軸11Aを回転させる。軸受け311及びギアユニット313は、保持フレーム212によって保持されている。
第2ねじ軸12の下端部122には、スリット123とピン孔124とが備えられている。スリット123は、筒状の周壁の一部を矩形状に切り欠くことにより形成されている。図8では、一つのスリット123だけが表れているが、該スリット123と対向する周壁にも同様なスリットが存在する。ピン孔124は、スリット123が形成されていない一対の周壁部分に、スリット123とは周方向に90度だけずれた位置に各々穿孔されている。ピン孔124には、第2ねじ軸12と連結片16とを機械的に連結する連結ピン17が挿通される。
第2ねじ軸12の上下方向の中間部付近における周壁には、上下方向に延びる長溝125が形成されている。長溝125には、ガイドねじ215の先端部が嵌り込んでいる。ガイドねじ215は、ロッド保持フレーム214にねじ止めされる部分と、該部分に連設された前記先端部とを含む。上述の通り、第1ねじ軸11Aが軸回りに回転すると、第2ねじ軸12が上下方向に移動する。この際、第2ねじ軸12は、長溝125に嵌り込んだガイドねじ215によって、軸回りには回転することなく、その上下方向の移動がガイドされる。長溝125の上下方向の長さは、第2ねじ軸12の移動範囲に相当する。
連結片16は、上側に位置するフック部161と、下側に位置するねじ部162とを備える。フック部161はスリット123に収容可能な幅を有し、連結ピン17を挟持することができる受け溝163を有している。フック部161がスリット123に収容された状態で、連結ピン17が一対のピン孔124及び受け溝163を貫通することで、第2ねじ軸12の下端部122に連結片16が連結されることになる。
第1筒状ロッド13は、吐出ロッド15及びコイルバネ18を収容する筒状空間13Hを内部に備える円筒部材である。筒状空間13Hを区画する内壁の上端付近には、ねじ溝が刻まれている。このねじ溝が連結片16のねじ部162に螺合されることによって、第1筒状ロッド13が、連結片16を介して第2ねじ軸12(軸部材11)に接続される。その結果、第1筒状ロッド13は第2ねじ軸12と一体的に上下方向に移動することができる。
第1筒状ロッド13は、下方から上方に向けて、その外径が3段階で拡径する形状を有している。第1筒状ロッド13は、最も下方に位置し最も外径が小さい第1筒部131と、第1筒部131の上方に連設され該第1筒部131よりも大径の第2筒部132と、第2筒部132の上方に連設され該第2筒部132よりも大径の第3筒部133とを備えている。第2筒部132の周壁には、上下方向に延びる長孔134が形成されている。
吐出ロッド15は、プランジャ72を上下方向に動作させるための部材であり、第1筒状ロッド13の筒状空間13H内に、第1筒状ロッド13に対して上下方向に相対移動可能に収容されている。吐出ロッド15もまた、下方から上方に向けて、その外径が3段階で拡径する形状を有している。吐出ロッド15は、最も下方に位置し最も小さい第1外径を有する第1円柱部151と、第1円柱部151の上方に連設され前記第1外径よりも大きい第2外径を有する第2円柱部153と、第2円柱部153の上方に連設され前記第2外径よりも大きい第3外径を有する第3円柱部155とを備えている。第1円柱部151の下端付近は、プランジャ72のプランジャ基端部721が外嵌されるプランジャ装着部152である。また、第2円柱部153の下端付近には、横方向に当該第2円柱部153を貫通するストッパ孔154が穿孔されている。
ヘッド10の要部断面図を示す図10も参照して、第1筒状ロッド13の第1筒部131は、前記第1外径よりもやや大きい内径を有し、第1円柱部151を収容する。第2筒部132は、前記第2外径よりもやや大きい内径を有し、第2円柱部153を収容する。第3筒部133は、前記第3外径よりもやや大きい内径を有し、第3円柱部155を収容する。上下方向の長さにおいて、第1円柱部151は第1筒部131よりも長く、第2円柱部153は第2筒部132とほぼ同じである。第3円柱部155は、第3筒部133よりも十分短い円板状の部材である。
ストッパ孔154は、円柱状のピン部材からなるストッパ19を挿通させるための孔である。ストッパ孔154は、第1筒状ロッド13に吐出ロッド15が収容された状態で、長孔134と位置合わせされる。ストッパ19は、位置合わせされた長孔134及びストッパ孔154を貫通するように、第1筒状ロッド13及び吐出ロッド15に対して組み付けられる。ストッパ19は、第2筒部132の外径よりも長い部材である。従って、長孔134に挿通された状態において、ストッパ19の両端部は第2筒部132の外周壁から側方に突出する。
長孔134は、ストッパ19の上下方向の相対的な移動を許容する。このことは、ストッパ19がストッパ孔154に挿通された状態の吐出ロッド15の上下方向の移動範囲は、つまり第1筒状ロッド13に対する吐出ロッド15の相対的な移動範囲は、長孔134の上下方向の長さの範囲に規制されることを意味する。図10では、ストッパ19が長孔134の下端と接触している状態を示している。この状態では、第1円柱部151の下端、つまりプランジャ装着部152が第1筒部131から突出する状態となる。
コイルバネ18は、上下方向に伸長する付勢力を発生するバネであり、第1筒状ロッド13の筒状空間13H内において、連結片16の下端面と第3円柱部155の上面との間(軸部材11と吐出ロッド15との間)に介在されている。連結片16は第1筒状ロッド13にねじ止めされているので、コイルバネ18は吐出ロッド15を下方に押圧する付勢力を発生する。この付勢力により、図10に示しているように、第3円柱部155の下面(吐出ロッド15一部)が、第2筒部132と第3筒部133との内径差に基づき形成される段差部13A(第1筒状ロッド13の一部)に当止される。この付勢力を伴った当止より、吐出ロッド15は、第2ねじ軸12(軸部材11)の上下動に連動する状態となる。なお、ストッパ19が第2筒状ロッド14の係止部145と干渉すると、吐出ロッド15の上記連動が行われなくなり、コイルバネ18は圧縮される。この点については、後記で説明する。
第2筒状ロッド14は、下方から上方に向けて、その外径が3段階で拡径する形状を有している。第2筒状ロッド14は、最も下方に位置し最も外径が小さい第1筒部141と、第1筒部141の上方に連設され該第1筒部141よりも大径の第2筒部143と、第2筒部143の上方に連設され該第2筒部143よりも大径の第3筒部144とを備えている。第2筒状ロッド14は、第1筒状ロッド13を上下方向に移動可能に収容する収容空間14Hを備えている。収容空間14Hの内径は、第1、第2、第3筒部141、143、144の外径に応じて、下方から上方に向けて拡径している。また、第1筒部141の下端付近は、シリンジ71のシリンジ基端部711が外嵌されるシリンジ装着部142である。
第2筒状ロッド14の上端部分14Tは、ロッド保持フレーム214に固定的に保持されている。従って、第2筒状ロッド14は、第1フレーム21と一体的に上下動はするが、第1フレーム21に対しては相対的に移動しない。つまり、第1筒状ロッド13は第2ねじ軸12と連動するので、第1フレーム21に対して相対的に移動するのに対して、第2筒状ロッド14は不動である。
第2筒状ロッド14の内部には、ストッパ19と干渉する係止部145が備えられている。係止部145は、第2筒部143と第3筒部144との境界部分の内面に設けられ、両者の内径差に基づき形成される段差部分である。吐出ロッド15のストッパ孔154に水平方向に挿通されたストッパ19は、第3筒部144の内径よりも短く、第2筒部143の内径よりも長い長さを有する。このため、ストッパ19を備えた吐出ロッド15が所定位置まで下降すると、ストッパ19の両端が係止部145に干渉する。
以上の通り構成された装着用ヘッド10は、シリンダチップ70を動作させて、細胞凝集塊の吸引及び吐出を行わせる。すなわち、第2ねじ軸12(軸部材11)の上下方向の移動に吐出ロッド15が連動することによって、吐出ロッド15に装着されたプランジャ72がシリンジ71の管状通路71P内を進退移動し、吸引口71Tからの細胞凝集塊の管状通路71P内への吸引、及び吸引された前記細胞凝集塊の吸引口71Tからの吐出が行われる。この動作を、図9〜図12に基づき説明する。
図9は、ヘッド10において吐出ロッド15が上昇している状態を示す斜視図、図10は、図9の状態のヘッド10の要部断面図である。図9及び図10の状態は、上述のステップ4における細胞凝集塊の吸引動作が行われている状態(図6(D)参照)に相当する。この吸引動作時には、第2ねじ軸12が上方に移動するように第1ねじ軸11Aが回転駆動される。
第2ねじ軸12が上昇すると、連結片16及び連結ピン17によって第2ねじ軸12に連結されている第1筒状ロッド13も一体的に上昇する。また、コイルバネ18の付勢力によって、吐出ロッド15の第3円柱部155の下面が第1筒状ロッド13の段差部13Aに当止した状態であるので、第2ねじ軸12の上昇に吐出ロッド15も連動する。このため、吐出ロッド15のプランジャ装着部152にプランジャ基端部721が嵌め込まれているプランジャ72は、不動の第2筒状ロッド14に装着されているシリンジ71に対して上方に移動する。
図9及び図10では、第2ねじ軸12が、その移動可能範囲内において最も上方に移動している状態を示している。この状態では、第2ねじ軸12の長溝125の下端付近にガイドねじ215が位置している。プランジャ72のプランジャ本体部722は、シリンジ本体部712の管状通路71Pから殆ど離脱し、先端部724付近だけが管状通路71Pの上端付近に挿通された状態となっている。これにより、管状通路71P内に細胞凝集塊を吸引することができる。
図11は、吐出ロッド15が下降している状態を示す斜視図、図12は、図11の状態のヘッド10の要部断面図である。図11及び図12の状態は、上述のステップ2における細胞凝集塊の吸引動作が行われる直前の状態(図6(B)参照)、及び、ステップ5の細胞凝集塊の吐出動作が行われている状態(図6(E)参照)に各々相当する。これらの動作時には、第2ねじ軸12が下方に移動するように第1ねじ軸11Aが回転駆動される。
図9及び図10に示す状態から、第2ねじ軸12が下降すると、第2ねじ軸12に連結されている第1筒状ロッド13も一体的に下降する。また、コイルバネ18の付勢力による、上述の第3円柱部155と段差部13Aとの当止によって、第2ねじ軸12の下降に吐出ロッド15も連動する。このため、吐出ロッド15に装着されているプランジャ72は、シリンジ71内に挿通されるように下方へ移動する。
図11及び図12では、第2ねじ軸12が、その移動可能範囲内において最も下方に移動している状態を示している。この状態では、第2ねじ軸12の長溝125の上端付近にガイドねじ215が位置している。プランジャ72のプランジャ本体部722は、シリンジ本体部712の管状通路71Pに最も深く挿通され、先端部724が吸引口71Tから突出する状態となっている。これにより、管状通路71P内に空気が存在しない状態、若しくは、管状通路71Pに一旦吸引した細胞凝集塊を吐出する状態を形成することができる。
以上は、第2ねじ軸12(軸部材11)の上下方向の移動に吐出ロッド15を連動させることにより、シリンダチップ70に対象物の吸引及び吐出を行わせる動作状態(第1状態という)である。本実施形態のヘッド10は、第2ねじ軸12の上下方向の移動に拘わらず吐出ロッド15を停止させる動作状態(第2状態という)を形成することが可能である。この第2状態は、専らヘッド10からシリンダチップ70を自動的に取り外すために用いられる。以下、この点について説明する。
図13は、図12の状態からさらに第1筒状ロッド13が下降し、シリンダチップ70が取り外される状態を示す断面図である。上記の第1状態においては、吐出ロッド15のプランジャ装着部152は第1筒状ロッド13の下端(第1筒部131)から下方に突出しており、第2ねじ軸12の上下方向の移動によって、プランジャ72がシリンジ71の管状通路71P内を進退移動する。一方、前記第2状態においては、ねじ軸12の下方向への移動によって、プランジャ装着部152は第1筒状ロッド13の筒状空間13H内に収容される。これにより、プランジャ装着部152に装着されたプランジャ72(プランジャ基端部721)の上端縁が、第1筒状ロッド13の下端131Tに押圧され、プランジャ72が吐出ロッド15から離脱する。このプランジャ72の離脱力に押圧されて、シリンジ71も第2筒状ロッド14から離脱する。
上記の動作を詳述する。図12の状態(第1状態)から、ねじ軸12が下方に移動(第2状態への移行)すると、第1筒状ロッド13も一体的に下方へ移動する。これに対し、吐出ロッド15は、ストッパ19が第2筒状ロッド14の係止部145に干渉するので、これ以上は下方へ移動することが出来ない。つまり、第1状態では、コイルバネ18の付勢力によって、吐出ロッド15の第3円柱部155が第1筒状ロッド13の段差部13Aに当止され、ストッパ19が係止部145に干渉しない範囲でヘッド10の動作が行われるので、吐出ロッド15は第2ねじ軸12の上下動に連動する。しかし、第2状態へ至ると、ストッパ19と係止部145との干渉によって、もはや吐出ロッド15は第2ねじ軸12の上下動に連動しなくなる。本実施形態では、コイルバネ18、ストッパ19と係止及び部145が連動機構を構成している。
第2状態では、ストッパ19と係止部145との干渉によって、コイルバネ18の付勢力に抗して吐出ロッド15が第1筒状ロッド13に対して相対的に上方へ移動する。つまり、コイルバネ18は圧縮される。この際、ストッパ19は長孔134内を相対的に上方へ移動することとなる。このような移動動作によって、吐出ロッド15のプランジャ装着部152が第1筒状ロッド13の第1筒部131内へ徐々に収容されるようになる。そして、第1筒状ロッド13の下端131Tが、プランジャ基端部721の上縁に突き当たり、プランジャ72を下方へ押し遣るようになる。
図13は、第1筒状ロッド13が最下位置まで下降した状態を示している。この状態では、ストッパ19は長孔134の上端に位置し、第1筒部131はプランジャ装着部152を完全に覆い、下端131Tは吐出ロッド15の下端と略面一になっている。従って、この状態に至ると、プランジャ72はプランジャ装着部152から離脱する。
さらに、本実施形態では、第1筒状ロッド13が最下位置まで下降したとき、下端131Tと第2筒状ロッド14の下端もまた略面一になる。つまり、第1筒状ロッド13の筒状空間13H内に収容された状態の吐出ロッド15のプランジャ装着部152の高さ位置と、第2筒状ロッド14のシリンジ装着部142の高さ位置とが略同一となる。このため、プランジャ72が下端131Tに押圧されてプランジャ装着部152から離脱することに伴い、シリンジ71もまた、プランジャ72に押圧されてシリンジ装着部142から離脱する。これは、下端131Tの押圧によりプランジャ72がプランジャ装着部152から徐々に離脱してゆくに伴い、半球部723(図4)がシリンジ71のテーパ筒部713を押圧し、シリンジ71を徐々にシリンジ装着部142から離脱させて行くことによる。このように、本実施形態によれば、プランジャ72及びシリンジ71の双方のヘッド10から取り外しを、第2ねじ軸12の下方向への移動動作によって自動的に行わせることができる。なお、この動作は、上述のステップ6の動作に相当する。
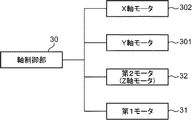
図14は、ヘッド装置1の制御構成を示すブロック図である。ヘッド装置1は、軸部材11(第2ねじ軸12)の上下方向の移動を制御するため、及び、ヘッド装置1自体のX方向、Y方向及びZ方向の移動を制御するための、軸制御部30(制御部)を備える。軸制御部30は、上述の第1モータ31及び第2モータ32(Z軸モータ;ヘッド10を全体的に上下方向に移動させる機構)と、上掲の図では不図示のX軸モータ302及びY軸モータ301(ヘッド装置1を水平方向に移動させるヘッド移動機構)とを制御する。
第1モータ31は、第1ねじ軸11Aを回転させることで第2ねじ軸12を上下動させ、上述の通り、シリンダチップ70による細胞凝集塊(対象物)の吸引及び吐出、さらにはシリンダチップ70のヘッド10からの離脱を行わせる。第2モータ32は、ボールねじ装置3Aを動作させることで、ヘッド10が搭載された第1フレーム21をZ方向に移動させる。X軸モータ302は、ヘッド装置1のX方向への移動をガイドするXガイドフレーム(図略)に搭載され、ヘッド装置1をX方向に移動させる。Y軸モータ301は、ヘッド装置1のY方向への移動をガイドするYガイドフレーム(図略)に搭載され、ヘッド装置1をY方向に移動させる。
軸制御部30は、第1モータ31の駆動を制御することによって、第2ねじ軸12の上下方向の動作を制御し、これにより細胞凝集塊の吸引及び吐出、さらにはシリンダチップ70の離脱動作を制御する。
また、軸制御部30は、第2モータ32の駆動を制御することによって、ヘッド10のZ方向における高さ位置を制御する。例えば、上述のステップ3及びステップ5においてシリンダチップ70を全体的に下降させる動作(図6(C)及び図6(E)参照)、及びステップ4の吸引(図6(D))の後にシリンダチップ70を全体的に上昇させる動作の際に、軸制御部30は第2モータ32を制御し、前記下降及び上昇の動作を制御する。
さらに、軸制御部30は、X軸モータ302及びY軸モータ301の駆動を制御することによって、ヘッド装置1のX方向及びY方向への移動を制御する。例えば、上述のステップ4からステップ5への移行の際に、ヘッド10(シリンダチップ70)が第1容器C1の上空から第2容器C2の上空に移動するよう、軸制御部30はX軸モータ302及びY軸モータ301を制御し、ヘッド装置1を移動させる。
以上説明した通り、本実施形態のヘッド10によれば、軸部材11の第2ねじ軸12の上下方向の移動に連動する吐出ロッド15にシリンダチップ70のプランジャ72が嵌め込まれ、不動の第2筒状ロッド14にシリンジ71が嵌め込まれる。吐出ロッド15の上方向への移動によってプランジャ72がシリンジ71に対して相対的に上方へ移動し、シリンジ71の管状通路71P内に対象物としての細胞凝集塊が吸引される。その後、吐出ロッド15の下方向への移動によって、管状通路71P内に吸引された前記対象物は、シリンダチップ70から吐出される。従って、第2ねじ軸12を上下方向に移動させるだけで、シリンダチップ70内への前記対象物の吸引、及びシリンダチップ70からの前記対象物の吐出を実行させることができる。
また、本実施形態のヘッド10によれば、上述の第1状態においては、第2ねじ軸12の上下方向に移動に吐出ロッド15が連動するので、第2ねじ軸12の上下動によって、シリンダチップ70内への前記吸引及び前記吐出を実行させることができる。一方、前記第2状態では、第2ねじ軸12の上下方向に移動に吐出ロッド15は連動せず、第2ねじ軸12が下方に移動すると第1筒状ロッド13だけが下降し、吐出ロッド15は筒状空間13H内に収容される。この際、プランジャ装着部152に装着されたプランジャ72が第1筒状ロッド13の下端131Tに押圧されて離脱する。また、プランジャ72の離脱に伴い、シリンジ71もシリンジ装着部142から離脱させることができる。従って、シリンダチップ70のヘッド10からの取り外しを、第2ねじ軸12の下方向への移動動作によって自動的に行わせることができる。
続いて、本実施形態に係るヘッド10及びヘッド装置1が好適に適用される細胞の移動装置4を例示する。図15は、移動装置4の斜視図、図16は、ヘッド10(ヘッド装置1)が組み込まれたヘッドユニット61の斜視図である。移動装置4は、支持フレーム41、支持フレーム41によって支持される基台42、基台42に組み付けられる細胞移動ライン50、基台42の上方に配置されるヘッドユニット61及び照明ユニット62、及び、基台42の下方に配置される撮像ユニット63を備えている。
支持フレーム41は、基礎フレーム411と、一対のサイドフレーム412とを含む。基礎フレーム411は、X方向に長い直方体形状のフレーム組立体であり、矩形の下層フレーム枠411Aと、その上の上層フレーム枠411Bとを含む。上層フレーム枠411Bの上面には、撮像ユニット63をX方向に移動させるためのガイドレール413が備えられている。基台42は、所定の剛性を有し、その一部又は全部が透光性の材料で形成され、上面視において基礎フレーム411と略同じサイズの有する長方形の平板である。
基台42の上には、フレーム架台43が立設されている。フレーム架台43は、X方向に延びる平板である上フレーム431及び中フレーム432を備える。上フレーム431の上面には、ヘッドユニット61をX方向に沿って移動させるための上ガイドレール433が組み付けられている。また、中フレーム432の上面には、照明ユニット62をX方向に沿って移動させるための中ガイドレール434が組み付けられている。
細胞移動ライン50は、細胞含有液から所望の細胞凝集塊を抽出し、これを所定の容器へ移動させる一連の細胞移動工程の実施に必要なエレメントが、X方向に配列されてなる。細胞移動ライン50は、細胞含有液を貯留する対象物ストック部51、分注チップストック部52、細胞含有液が分注され細胞凝集塊を選別するための細胞選別部53、チップストック部54、チップ撮像部55、選別された細胞凝集塊を受け入れる細胞移載部56、ブラックカバー載置部57及びチップ廃棄部58を備えている。ここでは、細胞選別部53が、図6(A)〜(D)に示した第1容器C1に相当する容器であり、細胞移載部56が、図6(E)に示した第2容器C2に相当する容器である。
ヘッドユニット61は、ユニット本体611、ヘッド部612、Xスライダ613及びYスライダ614を含む。図16に示すように、ヘッド部612は、上記で説明した複数のヘッド10、第1ノズル615及び第2ノズル616を備えている。本実施形態では、8本のヘッド10がX方向に一列に配列されている例を示している。ヘッド10の本数は任意であり、またX−Y方向にマトリクス状に配列されていても良い。第1ノズル615及び吸盤617付きの第2ノズル616は、上下動が可能にユニット本体31に組み付けられ、吸引力及び吐出力を発生するピストン機構を内部に備えている。ユニット本体611の内部には、図1〜図3に示したボールねじ装置3Aなどの、ヘッド10をZ方向に移動させるための機構が内蔵されている。
Xスライダ613は、上ガイドレール433に対して組み付けられている。上ガイドレール433には、図14のX軸モータ302に相当するX駆動モータ441が付設されている。X駆動モータ441の動作によって、Xスライダ613は上ガイドレール433上をX方向に移動する。Yスライダ614は、Y方向の一端(前端)においてユニット本体611を支持している。Yスライダ614は、Xスライダ613の上面に配置されたYレール(図15には現れていない)に対して組み付けられている。前記Yレールに付設された図略の駆動モータ(図14のY軸モータ301に相当)が動作することで、Yスライダ614及びユニット本体611はY方向に移動する。つまり、ヘッド部612は、ユニット本体611が上ガイドレール433及び前記Yレールに沿って移動することで、X方向及びY方向に移動自在である。従って、ヘッド部612は、基台42の上方において、細胞移動ライン50上を所定の移動経路に沿って移動することができる。
照明ユニット62は、専ら細胞選別部53及び細胞移載部56を上方から照明するために、基台42の上方に移動可能に配置されている。前記照明は、細胞選別部53又は細胞移載部56に保持されている細胞凝集塊を撮像ユニット63にて撮像する際に、透過照明として使用される。照明ユニット62は、照明光を発する照明器621、Xスライダ622及びホルダー623を含む。Xスライダ622は、中ガイドレール434に対して組み付けられている。中ガイドレール434には、照明ユニット駆動モータ443が付設されている。駆動モータ443の動作によって、Xスライダ622は中ガイドレール434上をX方向に移動する。ホルダー623は、照明器621を保持すると共に、図略の駆動装置によってXスライダ622に対してY方向に短距離だけ移動可能に組み付けられている。従って、照明器621は、基台42の上方において、X方向及びY方向に移動可能である。
撮像ユニット63は、細胞選別部53及び細胞移載部56に保持されている細胞凝集塊を基台42の下方から撮像するために、基台42の下方に移動可能に配置されている。さらに、本実施形態では、撮像ユニット63は、チップ撮像部55においてシリンダチップ70のヘッド10への装着状態を観察するためにも用いられる。撮像ユニット63は、カメラ631、落射照明器632、Xスライダ633及びホルダー634を含む。
カメラ631は、CCDイメージセンサと、該CCDイメージセンサの受光面に光像を結像させる光学系とを含む。落射照明器632は、カメラ631の撮像対象物が光の透過体でない場合や蛍光染色されている場合等に用いられる光源である。Xスライダ633は、支持フレーム41のガイドレール413に対して組み付けられている。ガイドレール413には、撮像ユニット駆動モータ444が付設されている。駆動モータ444の動作によって、Xスライダ633はガイドレール413上をX方向に移動する。ホルダー634は、カメラ631及び落射照明器632を保持すると共に、図略の駆動装置によってXスライダ633に対してY方向に短距離だけ移動可能に組み付けられている。従って、カメラ631は、基台42の下方において、X方向及びY方向に移動可能である。
図17は、基台42の図示を省き、細胞移動ライン50の構成要素を抜き出して示す斜視図である。図17には、上述のヘッドユニット61、照明ユニット62及び撮像ユニット63の配置位置も模式的に付記している。細胞移動ライン50は、X方向の上流側(図17の左端側)から順に、分注チップストック部52、対象物ストック部51、チップストック部54、チップ撮像部55、細胞選別部53、ブラックカバー載置部57、細胞移載部56及びチップ廃棄部58が一列に配列されてなる。これらの各部は、位置決め部材42Sによって、基台42上の位置が定められている。ここに示した細胞移動ライン50の配列は一例であり、作業効率等を考慮して各部の配置位置を適宜設定することができる。例えば、ブラックカバー載置部57を、細胞選別部53、細胞移載部56の前方側(+Y)又は後方側(−Y)に配置しても良い。
対象物ストック部51は、分注元となる、多量の細胞凝集塊(対象物)が分散された細胞培養液(液体)を貯留する部位である。対象物ストック部51は、基台42上の所定位置に配置されたボックス511と、このボックス511で保持されたチューブ512と、ボックス511上に載置された蓋部材513とを備える。チューブ512は、上面が開口した円筒状容器であり、細胞凝集塊や夾雑物を含む細胞培養液を貯留する。蓋部材513は、チューブ512の開口を塞ぐための部材である。
分注チップストック部52は、複数個の分注チップ80を保管する部位である。分注チップ80は、細長いチューブ状の部材であり、第1ノズル615に嵌め込まれる上端部と、細胞培養液を吸引及び吐出する開口を端縁に備えた下端部とを備える。分注チップ80は、第1ノズル615に対して装着及び取り外しが可能である。分注チップ80は、第1ノズル615から吸引力が与えられることで、細胞培養液を吸引する一方、前記吐出力を与えられることで吸引した細胞培養液を吐出する。分注チップストック部52は、立設状態でマトリクス状に整列された分注チップ80を保持する保持ボックス521と、ボックス蓋部材523とを備えている。保持ボックス521の内部には、分注チップ80を整列保持するためのホルダー部材522が配置されている。
細胞選別部53は、各種サイズの細胞凝集塊や夾雑物を含む細胞培養液から、所望のサイズの細胞凝集塊を選別するための部位である。細胞選別部53は、ディッシュ64、保持テーブル531及びテーブル蓋部材532を含む。ディッシュ64は、分注チップ80によって細胞凝集塊を含む細胞培養液が分注され、該細胞培養液を貯留することができる上面開口の容器である。保持テーブル531は、ディッシュ64を位置決めして保持する。テーブル蓋部材532は、ディッシュ64及び保持テーブル531の上面を覆い隠すための蓋部材である。
ディッシュ64は、上面側に細胞凝集塊を担持するための複数の凹部を備えたウェルプレートを含む。前記凹部の底部には貫通孔が設けられており、抽出対象となる細胞凝集塊は前記凹部で保持され、夾雑物等は前記貫通孔から落下する。このように細胞凝集塊と夾雑物との選別が行われるので、前記ウェルプレート上には細胞凝集塊だけが残存するようになる。前記凹部に担持された状態の細胞凝集塊の画像が、照明ユニット62の点灯下でカメラ631にて撮像される。これにより、吸引すべき細胞凝集塊の位置が特定される。
チップストック部54は、上述したシリンダチップ70の多数個を保持する部位である。シリンダチップ70は、ヘッド10に対して装着及び取り外しが可能である。シリンダチップ70は、上述のウェルプレートの凹部に担持された細胞凝集塊を吸引し、ヘッドユニット61の移動に伴い該細胞凝集塊を運搬し、これを細胞移載部56へ吐出する機能を果たす。
チップストック部54は、保持ボックス541と、ボックス蓋部材543とを備えている。保持ボックス541は、立設状態でマトリクス状に整列されたシリンダチップ70を保持する。保持ボックス541の内部には、シリンダチップ70を整列保持するためのホルダー部材542が配置されている。シリンダチップ70は、その上端部分が保持ボックス541の上端面から上方に突出した状態で、保持ボックス541に保持されている。つまり、Z方向に移動するヘッド10に対して装着が容易に行い得る状態で、シリンダチップ70は、保持ボックス541に保持されている。ボックス蓋部材543は、保持ボックス541の上端面の上に被せられ、シリンダチップ70を覆い隠すための蓋部材である。
チップ撮像部55は、ヘッド10に装着されたシリンダチップ70の画像が撮像される位置を提供するピットである。前記撮像は、撮像ユニット63によって行われる。前記撮像が行われる際、撮像ユニット63のカメラ631は、チップ撮像部55の直下に移動され、落射照明器632の照明下において、各シリンダチップ70の画像を撮像する。シリンダチップ70の画像並びに撮像時における焦点位置情報に基づき、シリンダチップ70の吸引口71TのXYZ座標位置が求められる。当該座標位置と、予め定められた基準位置との差分から補正値が導出される。当該補正値は、ヘッド10の移動制御の際の補正値として利用される。なお、落射照明器632に代えて、チップ撮像部55自体にLED照明具のような照明器具を装備させ、該照明器具の照明下で前記撮像を行うようにしても良い。
細胞移載部56は、細胞移動ライン50においてX方向の下流側端部付近に配置され、細胞選別部53のディッシュ64から吸引された細胞凝集塊の移動先となる部位である。細胞移載部56は、マイクロプレート65、保持テーブル561及びテーブル蓋部材562を含む。なお、マイクロプレート65に代えて、ディッシュ64と同様な容器を細胞移載部56に具備させても良い。
マイクロプレート65は、上面が開口した多数の小さなウェル66が、マトリクス状に配列されたプレートである。マイクロプレート65は、透光性の部材、例えば透明プラスチックで形成されている。一般に、1のウェル66には、1の細胞凝集塊が収容される。従って、各ウェル66に収容された状態の細胞凝集塊を、カメラ631によって撮像することができる。また、ウェル66の配列ピッチは、一列に並んだヘッド10に装着されたシリンダチップ70群の配列ピッチと略同一に設定されている。これにより、一群のシリンダチップ70から同時にウェル66に細胞凝集塊を吐出させることが可能である。なお、1のウェル66に、指定個数の細胞凝集塊を収容させたり、指定量(総体積又は総面積)の細胞凝集塊を収容させたりすることもできる。保持テーブル561は、マイクロプレート65を位置決めして保持する。テーブル蓋部材562は、マイクロプレート65及び保持テーブル561の上面を覆い隠すための蓋部材である。
ブラックカバー載置部57は、細胞移載部56に被せられる第1ブラックカバー571と、細胞選別部53に被せられる第2ブラックカバー572とが載置される部位である。第1、第2ブラックカバー571、572は、遮光された状態で、ディッシュ64又はマイクロプレート65に担持された細胞凝集塊を撮像する際に用いられる遮光体である。例えば、細胞培養液に蛍光剤を添加し、細胞凝集塊を蛍光観察する際に、第1、第2ブラックカバー571、572は、保持テーブル531、561を覆い隠すように被せられる。
チップ廃棄部58は、細胞移動ライン50においてX方向の最も下流側端部に配置され、上述の吸引及び吐出動作を終えた使用後のシリンダチップ70及び分注チップ80が廃棄される部位である。チップ廃棄部58は、使用後のシリンダチップ70及び分注チップ80を収容するための回収ボックス581を含む。前記廃棄の際、シリンダチップ70又は分注チップ80を装備したヘッドユニット61が回収ボックス581の開口部582上に移動され、シリンダチップ70又は分注チップ80のヘッド部612からの取り外し動作が実行される。この取り外し動作により、シリンダチップ70又は分注チップ80は、開口部582を通して回収ボックス581に落下する。
上記の通り構成された移動装置4は、図14の軸制御部30に相当する制御部(移動装置4に接続されたパーソナルコンピュータ等)によって、その動作が制御される。前記制御部は、大別して分注動作と、本実施形態に係るヘッド10を用いた細胞移動動作とを移動装置4に実行させる。まず、前記分注動作において、前記制御部は、順次、
[制御1]ヘッドユニット61を分注チップストック部52上に移動させ、第1ノズル615に分注チップ80を装着させる制御、
[制御2]ヘッドユニット61を対象物ストック部51上に移動させ、チューブ512に貯留された、細胞凝集塊を含む細胞培養液を所定の分注量だけ分注チップ80内に吸引させる制御、
[制御3]ヘッドユニット61を細胞選別部53上に移動させ、分注チップ80内の前記細胞培養液をディッシュ64に吐出させる制御、及び、
[制御4]ヘッドユニット61をチップ廃棄部58上に移動させ、使用済みの分注チップ80を第1ノズル615から取り外し、回収ボックス581内に廃棄させる制御、
を移動装置4に実行させる。
[制御1]ヘッドユニット61を分注チップストック部52上に移動させ、第1ノズル615に分注チップ80を装着させる制御、
[制御2]ヘッドユニット61を対象物ストック部51上に移動させ、チューブ512に貯留された、細胞凝集塊を含む細胞培養液を所定の分注量だけ分注チップ80内に吸引させる制御、
[制御3]ヘッドユニット61を細胞選別部53上に移動させ、分注チップ80内の前記細胞培養液をディッシュ64に吐出させる制御、及び、
[制御4]ヘッドユニット61をチップ廃棄部58上に移動させ、使用済みの分注チップ80を第1ノズル615から取り外し、回収ボックス581内に廃棄させる制御、
を移動装置4に実行させる。
前記細胞移動動作において、前記制御部は、順次、
[制御5]ヘッドユニット61をチップストック部54上に移動させ、ヘッド10にシリンダチップ70を装着させる制御、
[制御6]ヘッドユニット61を細胞選別部53上に移動させ、ディッシュ64に貯留された細胞凝集塊をシリンダチップ70内に吸引させる制御、
[制御7]ヘッドユニット61を細胞移載部56上に移動させ、シリンダチップ70内の細胞凝集塊をマイクロプレート65に吐出させる制御、及び、
[制御8]ヘッドユニット61をチップ廃棄部58上に移動させ、使用済みのシリンダチップ70をヘッド10から取り外し、回収ボックス581内に廃棄させる制御、
を移動装置4に実行させる。
[制御5]ヘッドユニット61をチップストック部54上に移動させ、ヘッド10にシリンダチップ70を装着させる制御、
[制御6]ヘッドユニット61を細胞選別部53上に移動させ、ディッシュ64に貯留された細胞凝集塊をシリンダチップ70内に吸引させる制御、
[制御7]ヘッドユニット61を細胞移載部56上に移動させ、シリンダチップ70内の細胞凝集塊をマイクロプレート65に吐出させる制御、及び、
[制御8]ヘッドユニット61をチップ廃棄部58上に移動させ、使用済みのシリンダチップ70をヘッド10から取り外し、回収ボックス581内に廃棄させる制御、
を移動装置4に実行させる。
上記制御5は、先に説明した図6(A)のステップ1の前に行われる制御である。本実施形態の移動装置4では、ヘッド10にシリンダチップ70を装着させる動作も自動化されている。ヘッドユニット61がチップストック部54上に移動された後、1のシリンダチップ70に対して位置合わせられた1のヘッド10が降下される。このとき、図4に示しているように、吐出ロッド15の下端面と第2筒状ロッド14の下端面とは略面一に設定される一方で、これら下端面に対して第1筒状ロッド13の下端面は上方に没入した状態とされる。その没入長さは、吐出ロッド15のプランジャ装着部152が露出する長さ(装着孔72Hの深さ)である。この状態のヘッド10が下降することで、プランジャ装着部152はプランジャ基端部721の装着孔72Hに圧入され、また、第2筒状ロッド14のシリンジ装着部142はシリンジ基端部711の中空部71Hに圧入される。これにより、シリンダチップ70のヘッド10への装着が完了する。
この装着の後、ヘッドユニット61はチップ撮像部55へ移動され、ヘッド10に装着されたシリンダチップ70の撮像が行われる。該撮像によって、各シリンダチップ70のヘッド10への装着状態が検知され、シリンダチップ70の吸引口71TのXYZ座標位置(ヘッド10の先端のXYZ座標に対する補正値)が求められる。
上記制御6は、図6(A)〜図6(D)に示すステップ1〜4の動作を行わせるための制御である。細胞凝集塊をシリンダチップ70内に吸引させる動作は、吐出ロッド15が下降している状態(図12)から、軸部材11の駆動によって上昇状態(図10)に移動されることによって実現される。この点は、先に説明した通りである。
上記制御7は、図6(E)に示すステップ5の動作を行わせるための制御である。シリンダチップ70内の細胞凝集塊をマイクロプレート65に吐出させる動作は、上記制御6とは逆に、上昇状態の吐出ロッド15(図10)を、軸部材11の駆動によって下降状態(図12)とすることにより実現される。
上記制御8は、上述したステップ6の動作を行わせるための制御である。使用済みのシリンダチップ70をヘッド10から取り外す動作は、先に図13に基づき説明した通り、第1筒状ロッド13を最下位置まで下降させることによって実現される。
以上説明した移動装置4によれば、本発明の実施形態に係るヘッド10(ヘッド装置1)を適用することで、シリンダチップ70のヘッド10への装着、シリンダチップ70によるディッシュ64(第1容器C1)からの細胞凝集塊の吸引、当該細胞凝集塊のマイクロプレート65(第2容器C2)への吐出、及び、チップ廃棄部58へのシリンダチップ70の廃棄までの一連の作業を、上記制御部による制御下で自動化することができる。従って、細胞凝集塊の移動作業効率を格段に高めることができる。
なお、上述した具体的実施形態には以下の構成を有する発明が主に含まれている。
本発明の一の局面に係るヘッド装置は、対象物の吸引、及び吸引された前記対象物の吐出を行う吸引口を有するチップが装着されるチップ装着部と、上下方向への移動によって前記吸引口に吸引力又は吐出力を発生させる軸部材と、を備えたヘッドと、前記軸部材を上下方向へ移動させる駆動力を発生する第1モータと、前記ヘッド及び前記第1モータを保持するフレーム部材と、前記フレーム部材を上下方向へ移動させる駆動力を発生する第2モータと、前記第1モータの駆動を制御することによって前記軸部材の上下方向の移動を制御すると共に、前記第2モータの駆動を制御することによって前記ヘッドの高さ位置を制御する制御部と、を備える。
上記のヘッド装置において、前記チップは、対象物の吸引経路となる管状通路を内部に備えるシリンジを含むシリンダチップであり、前記ヘッドは、前記軸部材の下端に取り付けられ、前記軸部材と一体的に上下方向に移動する第1筒状ロッドと、前記第1筒状ロッドを上下方向に移動可能に収容する収容空間と、前記チップ装着部として前記シリンジの基端部が嵌め込まれるシリンジ装着部と、を備えた不動の第2筒状ロッドと、を備え、前記軸部材の上下方向の移動に前記第1筒状ロッドが連動することによって、前記対象物の管状通路内への吸引、及び吸引された前記対象物の吐出が行われることが望ましい。
上記のヘッド装置において、前記チップは、対象物の吸引経路となる管状通路を内部に備えるシリンジと、前記管状通路内を進退移動するプランジャとを含むシリンダチップであり、前記ヘッドは、前記軸部材の下端に取り付けられ、前記軸部材と一体的に上下方向に移動し、内部に筒状空間を備えた第1筒状ロッドと、前記第1筒状ロッドを上下方向に移動可能に収容する収容空間と、前記チップ装着部として前記シリンジの基端部が嵌め込まれるシリンジ装着部と、を備えた不動の第2筒状ロッドと、前記第1筒状ロッドの前記筒状空間内に収容され、下端に前記プランジャの基端部が嵌め込まれるプランジャ装着部を備えた吐出ロッドと、を備え、前記軸部材の上下方向の移動に前記吐出ロッドが連動することによって、前記吐出ロッドに装着された前記プランジャが前記シリンジの前記管状通路内を進退移動し、前記対象物の管状通路内への吸引、及び吸引された前記対象物の吐出が行われることが望ましい。
本発明の他の局面に係るシリンダチップ装着用ヘッドは、対象物の吸引経路となる管状通路を内部に備えるシリンジと、前記管状通路内を進退移動するプランジャとを含むシリンダチップが装着されるヘッドであって、上下方向に移動する軸部材と、前記軸部材の下端に取り付けられ、前記軸部材と一体的に上下方向に移動し、内部に筒状空間を備えた第1筒状ロッドと、前記第1筒状ロッドを上下方向に移動可能に収容する収容空間を有し、下端に前記シリンジの基端部が嵌め込まれるシリンジ装着部を備えた不動の第2筒状ロッドと、前記第1筒状ロッドの前記筒状空間内に収容され、下端に前記プランジャの基端部が嵌め込まれるプランジャ装着部を備えた吐出ロッドと、を備え、前記軸部材の上下方向の移動に前記吐出ロッドが連動することによって、前記吐出ロッドに装着された前記プランジャが前記シリンジの前記管状通路内を進退移動し、前記対象物の管状通路内への吸引、及び吸引された前記対象物の吐出が行われる。
上記のヘッドによれば、軸部材の上下方向の移動に連動する吐出ロッドにプランジャの基端部が嵌め込まれ、不動の第2筒状ロッドにシリンジの基端部が嵌め込まれる。前記吐出ロッドの上方向への移動によって前記プランジャが前記シリンジに対して相対的に上方へ移動し、シリンダチップ内(前記管状通路内)に前記対象物が吸引される。その後、前記吐出ロッドの下方向への移動によって、前記管状通路内に吸引された前記対象物は、シリンダチップから吐出される。従って、軸部材を上下方向に移動させるだけで、シリンダチップ内への前記対象物の吸引、及びシリンダチップからの前記対象物の吐出を実行させることができる。
上記のシリンダチップ装着用ヘッドにおいて、前記吐出ロッドは、前記筒状空間内に、前記第1筒状ロッドに対して相対移動可能に収容され、前記軸部材の上下方向の移動に前記吐出ロッドを連動させる第1状態と、前記の上下方向の移動に拘わらず前記吐出ロッドを停止させる第2状態とを形成するための連動機構をさらに備え、前記第1状態において、前記吐出ロッドの前記プランジャ装着部は前記第1筒状ロッドの下端から下方に突出し、前記軸部材の上下方向の移動によって、前記プランジャが前記管状通路内を進退移動し、前記第2状態において、前記軸部材の下方向への移動によって、前記吐出ロッドの前記プランジャ装着部は前記第1筒状ロッドの前記筒状空間内に収容され、前記プランジャ装着部に装着された前記プランジャが前記第1筒状ロッドの下端に押圧されて離脱することが望ましい。
上記のヘッドによれば、前記第1状態においては、軸部材の上下方向に移動に吐出ロッドが連動するので、軸部材の上下動によって、シリンダチップ内への前記対象物の吸引、及びシリンダチップからの前記対象物の吐出を実行させることができる。一方、前記第2状態では、軸部材の上下方向に移動に吐出ロッドは連動せず、軸部材が下方に移動すると第1筒状ロッドだけが下降し、前記吐出ロッドは前記筒状空間内に収容される。この際、プランジャ装着部に装着された前記プランジャが前記第1筒状ロッドの下端に押圧されて離脱する。従って、前記プランジャのプランジャ装着部からの取り外しを、軸部材の下方向への移動動作によって自動的に行わせることができる。
上記のシリンダチップ装着用ヘッドにおいて、前記連動機構は、前記筒状空間内において前記軸部材と前記吐出ロッドとの間に介在され、付勢力を発生する弾性部材と、前記吐出ロッドに備えられたストッパと、前記第2筒状ロッドに備えられ、前記ストッパと干渉する係止部と、を含み、前記第1状態において、前記付勢力によって前記吐出ロッドの一部が前記第1筒状ロッドの一部に当止することで、前記吐出ロッドは前記軸部材に連動する状態となり、前記第2状態において、前記ストッパと前記係止部との干渉によって、前記付勢力に抗して前記吐出ロッドが上方へ相対移動することで、前記プランジャ装着部が前記筒状空間内に収容される構成とすることができる。
上記のヘッドによれば、前記弾性部材、前記ストッパ及び前記係止部による簡易な構成によって、前記第1状態では吐出ロッドが軸部材の上下動に連動し、前記第2状態では吐出ロッドが軸部材の上下動に連動せずに前記筒状空間内に収容される機構を実現することができる。
上記のシリンダチップ装着用ヘッドにおいて、前記吐出ロッドは、前記プランジャ装着部を有し、第1外径を有する第1円柱部と、前記第1円柱部の上方に連設され、前記第1外径よりも大きい第2外径を有し、前記ストッパが形成される第2円柱部と、前記第2円柱部の上方に連設され、前記第2外径よりも大きい第3外径を有する第3円柱部と、を含み、前記第1筒状ロッドは、前記第1外径よりもやや大きい内径を有し、前記第1円柱部を収容する第1筒部と、前記第1筒部の上方に連設され、前記第2外径よりもやや大きい内径を有し、前記第2円柱部を収容する第2筒部と、前記第2筒部の上方に連設され、前記第3外径よりもやや大きい内径を有し、前記第3円柱部を収容するする第3筒部と、前記第2筒部の周壁に形成され、前記ストッパの相対移動を許容する上下方向に延びる長孔と、を含み、前記弾性部材は、前記軸部材の下端面と前記第3円柱部の上面との間に配置されるコイルバネであり、前記第1状態において、前記第3円柱部が、前記第2筒部と前記第3筒部との径差に基づく段差に当止され、前記第2状態において、前記ストッパが前記長孔内を相対移動しつつ、前記第1筒部の下端面が前記プランジャの基端部を押圧する構成とすることができる。
上記のヘッドによれば、前記第1状態及び第2状態を、シンプルな形状の吐出ロッド及び第1筒状ロッドによって容易且つ確実に実現することができる。
上記のシリンダチップ装着用ヘッドにおいて、前記第2状態において、前記第1筒状ロッドの前記筒状空間内に収容された状態の前記吐出ロッドの前記プランジャ装着部の高さ位置と、前記第2筒状ロッドの前記シリンジ装着部の高さ位置とが略同一であり、前記プランジャ装着部に装着された前記プランジャが前記第1筒状ロッドの下端に押圧されて離脱することに伴い、前記シリンジ装着部に装着された前記シリンジが前記プランジャに押圧されて離脱することが望ましい。
上記のヘッドによれば、前記吐出ロッドの前記プランジャ装着部の高さ位置と、前記第2筒状ロッドの前記シリンジ装着部の高さ位置とが略同一とされる。このため、前記プランジャが前記プランジャ装着部から離脱されると、前記シリンジも前記プランジャに押圧されて前記シリンジ装着部から離脱する。従って、プランジャ及びシリンジの双方の取り外しを、軸部材の下方向への移動動作によって自動的に行わせることができる。
上記のシリンダチップ装着用ヘッドにおいて、前記軸部材は、ねじ軸であって、回転駆動力が与えられる第1ねじ軸と、前記第1ねじ軸に螺合される上端部と前記第1筒状ロッドが取り付けられる下端部とを備えた第2ねじ軸とを含むことが望ましい。
このヘッドによれば、軸部材の上下動を、第1ねじ軸の軸回りの回転による第2ねじ軸の上下動によって実現することができ、軸部材の駆動系を簡素化することができる。
本発明の他の局面に係るヘッド装置は、上記のシリンダチップ装着用ヘッドと、前記回転駆動力を発生するモータと、前記回転駆動力を前記軸部材に伝達する伝達機構と、前記モータ、前記伝達機構及び前記第2筒状ロッドを保持するフレーム部材と、前記モータの駆動を制御することによって、前記軸部材の上下方向の移動を制御する制御部と、を備える。
本発明のさらに他の局面に係る移動装置は、前記シリンダチップ装着用ヘッドを全体的に上下方向に移動させる機構を備えた上記のヘッド装置と、対象物を貯留する第1容器と、前記対象物を受け入れる第2容器と、前記ヘッド装置を前記第1容器と前記第2容器との間において水平方向に移動させるヘッド移動機構と、を備える。
以上説明した本発明によれば、シリンダチップを用いた対象物の吸引、前記吸引した対象物の吐出、さらにはヘッドへのシリンダチップの取り付け及び取り外しを自動化することができる。従って、シリンジとプランジャとを含むシリンダチップを用いた対象物の移動作業の作業効率を、格段に向上させることができる。
1 ヘッド装置
10 ヘッド
11 軸部材
13 第1筒状ロッド
13H 筒状空間
14 第2筒状ロッド
14H 収容空間
142 チップ装着部
21 第1フレーム(フレーム部材)
30 軸制御部(制御部)
31 第1モータ
32 第2モータ
70 シリンダチップ
71 シリンジ
71T 吸引口
71P 管状通路
72 プランジャ
10 ヘッド
11 軸部材
13 第1筒状ロッド
13H 筒状空間
14 第2筒状ロッド
14H 収容空間
142 チップ装着部
21 第1フレーム(フレーム部材)
30 軸制御部(制御部)
31 第1モータ
32 第2モータ
70 シリンダチップ
71 シリンジ
71T 吸引口
71P 管状通路
72 プランジャ
Claims (4)
- 対象物の吸引、及び吸引された前記対象物の吐出を行う吸引口を有するチップが装着されるチップ装着部と、上下方向への移動によって前記吸引口に吸引力又は吐出力を発生させる軸部材と、を備えたヘッドと、
前記軸部材を上下方向へ移動させる駆動力を発生する第1モータと、
前記ヘッド及び前記第1モータを保持するフレーム部材と、
前記フレーム部材を上下方向へ移動させる駆動力を発生する第2モータと、
前記第1モータの駆動を制御することによって前記軸部材の上下方向の移動を制御すると共に、前記第2モータの駆動を制御することによって前記ヘッドの高さ位置を制御する制御部と、
を備えるヘッド装置。 - 請求項1に記載のヘッド装置において、
前記チップは、対象物の吸引経路となる管状通路を内部に備えるシリンジを含むシリンダチップであり、
前記ヘッドは、
前記軸部材の下端に取り付けられ、前記軸部材と一体的に上下方向に移動する第1筒状ロッドと、
前記第1筒状ロッドを上下方向に移動可能に収容する収容空間と、前記チップ装着部として前記シリンジの基端部が嵌め込まれるシリンジ装着部と、を備えた不動の第2筒状ロッドと、を備え、
前記軸部材の上下方向の移動に前記第1筒状ロッドが連動することによって、前記対象物の管状通路内への吸引、及び吸引された前記対象物の吐出が行われる、ヘッド装置。 - 請求項1に記載のヘッド装置において、
前記チップは、対象物の吸引経路となる管状通路を内部に備えるシリンジと、前記管状通路内を進退移動するプランジャとを含むシリンダチップであり、
前記ヘッドは、
前記軸部材の下端に取り付けられ、前記軸部材と一体的に上下方向に移動し、内部に筒状空間を備えた第1筒状ロッドと、
前記第1筒状ロッドを上下方向に移動可能に収容する収容空間と、前記チップ装着部として前記シリンジの基端部が嵌め込まれるシリンジ装着部と、を備えた不動の第2筒状ロッドと、
前記第1筒状ロッドの前記筒状空間内に収容され、下端に前記プランジャの基端部が嵌め込まれるプランジャ装着部を備えた吐出ロッドと、を備え、
前記軸部材の上下方向の移動に前記吐出ロッドが連動することによって、前記吐出ロッドに装着された前記プランジャが前記シリンジの前記管状通路内を進退移動し、前記対象物の管状通路内への吸引、及び吸引された前記対象物の吐出が行われる、ヘッド装置。 - 請求項1〜3のいずれか1項に記載のヘッド装置と、
対象物を貯留する第1容器と、
対象物を受け入れる第2容器と、
前記ヘッド装置を前記第1容器と前記第2容器との間において水平方向に移動させるヘッド移動機構と、を備える移動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017024421A JP2017148037A (ja) | 2017-02-13 | 2017-02-13 | ヘッド装置及び移動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017024421A JP2017148037A (ja) | 2017-02-13 | 2017-02-13 | ヘッド装置及び移動装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016528678A Division JP6148407B2 (ja) | 2014-06-17 | 2014-06-17 | シリンダチップ装着用ヘッド、これを用いたヘッド装置及び移動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017148037A true JP2017148037A (ja) | 2017-08-31 |
Family
ID=59740914
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017024421A Pending JP2017148037A (ja) | 2017-02-13 | 2017-02-13 | ヘッド装置及び移動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017148037A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108261282A (zh) * | 2018-01-17 | 2018-07-10 | 王淑英 | 一种便携式眼科滴液装置 |
| CN114076708A (zh) * | 2020-07-31 | 2022-02-22 | 深圳市帝迈生物技术有限公司 | 一种自动混匀装置和样本分析仪 |
| CN114076708B (zh) * | 2020-07-31 | 2024-04-19 | 深圳市帝迈生物技术有限公司 | 一种自动混匀装置和样本分析仪 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001194372A (ja) * | 2000-01-17 | 2001-07-19 | Precision System Science Co Ltd | 容器搬送処理システム |
| WO2004092710A1 (ja) * | 2003-04-15 | 2004-10-28 | Universal Bio Research Co., Ltd. | 分注用シリンダ、大容量分注装置および大容量分注装置の使用方法 |
| JP2014530358A (ja) * | 2011-09-25 | 2014-11-17 | セラノス, インコーポレイテッド | 多重分析のためのシステム及び方法 |
| WO2015193957A1 (ja) * | 2014-06-17 | 2015-12-23 | ヤマハ発動機株式会社 | シリンダチップ装着用ヘッド、これを用いたヘッド装置及び移動装置 |
-
2017
- 2017-02-13 JP JP2017024421A patent/JP2017148037A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001194372A (ja) * | 2000-01-17 | 2001-07-19 | Precision System Science Co Ltd | 容器搬送処理システム |
| WO2004092710A1 (ja) * | 2003-04-15 | 2004-10-28 | Universal Bio Research Co., Ltd. | 分注用シリンダ、大容量分注装置および大容量分注装置の使用方法 |
| JP2014530358A (ja) * | 2011-09-25 | 2014-11-17 | セラノス, インコーポレイテッド | 多重分析のためのシステム及び方法 |
| WO2015193957A1 (ja) * | 2014-06-17 | 2015-12-23 | ヤマハ発動機株式会社 | シリンダチップ装着用ヘッド、これを用いたヘッド装置及び移動装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108261282A (zh) * | 2018-01-17 | 2018-07-10 | 王淑英 | 一种便携式眼科滴液装置 |
| CN114076708A (zh) * | 2020-07-31 | 2022-02-22 | 深圳市帝迈生物技术有限公司 | 一种自动混匀装置和样本分析仪 |
| CN114076708B (zh) * | 2020-07-31 | 2024-04-19 | 深圳市帝迈生物技术有限公司 | 一种自动混匀装置和样本分析仪 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6148407B2 (ja) | シリンダチップ装着用ヘッド、これを用いたヘッド装置及び移動装置 | |
| JP6181871B2 (ja) | 対象物の移動装置 | |
| JP6262254B2 (ja) | 対象物の移動装置 | |
| JP6293887B2 (ja) | 分注チップ装着用ヘッド装置及びこれを用いた移動装置 | |
| WO2017017990A1 (ja) | 対象物移動方法及び装置 | |
| US11680953B2 (en) | Cell transfer device and cell transfer method | |
| JP6387427B2 (ja) | 対象物の移動装置 | |
| WO2019150757A1 (ja) | 分注装置、チップ装着方法およびチップ除去方法 | |
| US20180249607A1 (en) | Filter holding structure and component mounting apparatus | |
| JP2017148037A (ja) | ヘッド装置及び移動装置 | |
| WO2021019623A1 (ja) | 細胞ピッキング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180123 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180717 |