JP2016200417A - 変位量計測システム及び変位計 - Google Patents
変位量計測システム及び変位計 Download PDFInfo
- Publication number
- JP2016200417A JP2016200417A JP2015078635A JP2015078635A JP2016200417A JP 2016200417 A JP2016200417 A JP 2016200417A JP 2015078635 A JP2015078635 A JP 2015078635A JP 2015078635 A JP2015078635 A JP 2015078635A JP 2016200417 A JP2016200417 A JP 2016200417A
- Authority
- JP
- Japan
- Prior art keywords
- amount
- displacement
- wound
- magnetic field
- rotary encoder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- A Measuring Device Byusing Mechanical Method (AREA)
Abstract
【課題】物体の変位量を安価で正確に計測できる変位量計測システム及び変位計を提供することを課題とする。【解決手段】変位する物体25の変位量を計測するシステムにおいて、線状体21が巻回され軸線まわりに回転可能な巻回体22と、該巻回体22と上記物体25とを接続する上記線状体21と、上記巻回体22の回転量を計測するロータリーエンコーダ24と、ロータリーエンコーダ24に接続されて計測情報を通信する光ファイバケーブル16A〜16Dと、上記光ファイバケーブル16A〜16Dが接続された光送受信装置とを有している。【選択図】図2
Description
変位する物体の変位量を計測する変位量計測システム及び変位計に関する。
様々な状況下において、物体の変位量を計測するのに際し、簡単な構成で正確な変位量を計測できるシステムや変位計が要求される。例えば、地盤の洗掘状態を検知するには、検知部として光学式または超音波式のセンサで空中から川底の深度を検知する方法が知られているが、大雨や濁流により光や超音波が妨害され正確な距離を検知することができない。
そこで、川底(地盤)に複数のセンサを埋設し、川底が洗掘されてセンサが水流にさらされるのを直接検知する方法が、例えば、特許文献1そして特許文献2で提案されている。センサは洗掘の有無を検知するものであるが、複数のセンサを鉛直方向で間隔をもった位置に埋設して、予め各センサの設置する深度を設定しておき、洗掘により露出することとなったセンサによって、洗掘の生じた深さを検知することができる。
特許文献1のセンサはAE(アコースティック・エミッション)センサであって、複数のセンサが取り付けられている柱状のセンサ本体が立設された地盤の洗掘で露出することとなったセンサが河川水中の浮遊固形物等の衝突を受けて生ずる超音波を検出し、この検出信号をセンサ本体に設けられた変換増幅部で増幅して送信している。このセンサ本体毎に設けられる変換増幅部は電源により駆動される。
また、特許文献2におけるセンサは、洗掘の際にセンサ収納筺体の姿勢が変化することでスイッチが開状態となる揺動センサで形成されていて、スイッチの作動で検知信号を発するようになっている。この検知信号はセンサ毎に設けられる電源から電力を受けて発生する。
特許文献1そして特許文献2の装置によれば、洗掘の深さを計測することができるが、洗掘の深度を計測するためには鉛直方向に間隔をもって複数のセンサを設置する必要がある。深度の検知精度はセンサ数に依存するので精度を高めるためには上記間隔を小さくしてセンサの数を多くする必要があり、その結果、設置費用が増大してしまう。
かかる事情に鑑み、本発明は、複数のセンサを用いずに、費用を低減して、なおかつ正確な変位量を計測することを可能とする変位量計測システム及び変位計を提供することを課題とする。
本発明によれば、上述の課題は、次の第一発明に係る変位量計測システム及び第二発明に係る変位計により解決される。
<第一発明>
本発明に係る変位量計測システムは、変位する物体の変位量を計測する。
本発明に係る変位量計測システムは、変位する物体の変位量を計測する。
かかる変位量計測システムにおいて、本発明では、線状体が巻回され軸線まわりに回転可能な巻回体と、該巻回体と上記物体とを接続する上記線状体と、上記巻回体の回転量を計測するロータリーエンコーダと、ロータリーエンコーダに接続されて計測情報を通信する光ファイバケーブルと、上記光ファイバケーブルが接続された光送受信装置と、
を有していることを特徴としている。
を有していることを特徴としている。
このような構成の本発明にあっては、物体の変位に伴って、巻回体が線状体を繰り出すか、あるいは巻き取る。巻回体に接続したロータリーエンコーダによって巻回体の回転量が計測され、巻回体の回転量と線状体の巻き径から線状体の繰り出し量あるいは巻き取り量を算出し、物体の変位量を計測する。センサとしてのロータリーエンコーダは一つで済む。
本発明において、ロータリーエンコーダは、外周部の単数または複数位置に磁石体が取り付けられた回転体と、該回転体の周方向での磁石体の移動に伴う磁場の変動を検知する磁場変動検知部とを有し、磁場変動検知部は、磁場の変動により出力する光強度が変化するファラデ素子センサとすることができる。
このロータリーエンコーダは回転体と回転体の回転状態を検知する磁場変動検知部とで構成される。回転体の外周部には磁石体が配されており、回転体の近傍に磁場変動を検知する磁場変動検知部が設けられており、回転体の回転に伴い該回転体の周方向で磁石体が回転して磁場変動検知部近傍での磁場の変動をファラデ素子センサで検知して回転体の回転量を計測する。
ファラデ素子センサは磁石体が近接して磁場が変動すると該ファラデ素子センサの出力する光強度が変動するため、該ファラデ素子センサが磁石体の通過を検出しその通過回数を計数することで回転体の回転量を計測することができる。
ファラデ素子センサは光ファイバケーブルが接続されているだけなので、電気部品を使用しておらず、電源(設備)を要しないとともに、落雷等の雷撃の影響を受ける虞れがない。このようにファラデ素子センサに対しては電源(設備)が不要なので、建設のイニシャルコスト、適用のランニングコストの低減を図ることができる。
また、ファラデ素子センサと光ファイバケーブルは光学的に接続されているだけなので機械部品がないため、長期間使用しても故障する可能性が低く安定性が高い。
さらには、計測信号を光ファイバケーブルで光通信しているため送受信機や、制御装置、分析装置等を設置する基地局を橋梁から数km〜数十km離間した遠隔地に設置することが可能となり、検知システムの運用の自由度が向上する。
<第二発明>
本発明に係る変位計は、線状体が巻回され軸線まわりに回転可能な巻回体の回転量を計測する。
本発明に係る変位計は、線状体が巻回され軸線まわりに回転可能な巻回体の回転量を計測する。
かかる変位計において、本発明では、上記巻回体と、該巻回体の回転量を計測するロータリーエンコーダとを備え、ロータリーエンコーダは、外周部の単数または複数位置に磁石体が取り付けられた回転体と、磁石体の回転に伴う磁場の変動を検知する磁場変動検知部とを有し、磁場変動検知部は、磁場の変動により出力する光強度が変化するファラデ素子センサであることを特徴としている。
本発明は、以上のように、物体の変位に伴って、巻回体が線状体を繰り出すか、あるいは巻き取り、この繰り出し量あるいは巻き取り量をロータリーエンコーダで計測された巻回体の回転量から得ることにより、物体の変位量を計測することとしており、物体が変位した際には、巻回体の回転量と線状体の巻き径から線状体の繰り出し量あるいは巻き取り量を算出し、物体の変位量を計測するので、センサとしてのロータリーエンコーダを一つ設けるだけで済み経済的に有利であり、物体の変位量を連続的に計測でき正確に変位量を知ることができる。
以下、添付図面にもとづき、本発明の一実施形態を説明する。本実施形態では、本発明に係る変位量計測システムを洗掘検知システムに適用する形態について説明する。
図1は洗掘検知システムとしての本実施形態装置の概要構成図、図2は図1装置の各検知ユニットの光ファイバケーブルの先端側における検知部分を示す図である。
本実施形態装置は、図1に見られるように、駅舎、保安区等に設置された監視基地局としての地盤洗掘監視装置10を有し、該地盤洗掘監視装置10は、光を送信そして受信する光送受信装置としての多数の検知ユニット11(図1では4つの検知ユニット11A,11B,11C,11Dのみが示されている)と、各検知ユニットからの信号情報から洗掘深度を得る深度換算装置12と、これらを制御するとともに深度換算装置12からの出力を判定する制御装置13と、その結果を表示する表示装置14とを有している。上記制御装置13は、列車T等に連絡する無線連絡装置15に接続されている。
各検知ユニット11A,11B,11C,11Dからは光ファイバケーブル16A,16B,16C,16Dが延出していて、これらの光ファイバケーブル16A,16B,16C,16Dは、好ましい形態として、一つの幹線ケーブル17としてまとめられて、地盤洗掘を検知すべき河川等の橋梁の位置に向け延びていてそれらの先端がファラデ素子を用いたファラデ近接センサ18A,18B,18C,18Dに接続されている。既述したように、検知ユニット11は多数設けられているので、一つの幹線ケーブル17には、それに対応する数だけの光ファイバケーブル16が挿通されている。
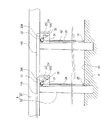
図1に見られるように、一つの幹線ケーブル17は、図2のごとく、鉄道等の橋梁Bの位置から橋梁Bを支持する複数の橋梁支持体B2にまで延びている。光ファイバケーブル16A,16Bは順次上記幹線ケーブル17から引き出されている。図2では、幹線ケーブル17から引き出された光ファイバケーブル16A,16Bの先端が接続されているファラデ近接センサ18A,18Bが図示されている。また、幹線ケーブル17に複数の光ファイバケーブル16を挿通させるのに代えて、例えば、幹線ケーブル17に複数の光ファイバ心線を収容するとともに、光ファイバ心線を金属管に挿通させた光ファイバケーブル16を幹線ケーブル17から各橋梁支持体B2に対して分岐させることとしてもよい。
図2に見られるように、橋梁Bは河川の上方に位置する橋梁本体B1と、河川の地盤に立設させてその上端で上記橋梁本体B1を支える支柱をなす橋梁支持体B2を有しており、上記橋梁本体B1と橋梁支持体B2の両者がなす隅部に検知ボックス20が支持されている。この検知ボックス20は、橋梁本体B1と橋梁支持体B2のいずれか一方で支持することもできる。
上記各検知ユニット11A,11B,11C,11Dから延びる光ファイバケーブル16A,16B,16C,16Dの先端は、既述のごとく、ファラデ近接センサ18A,18B,18C,18Dに接続されていて、各光ファイバケーブル16A,16B,16C,16Dは橋梁Bの対応橋梁支持体B2にまで延びているが、図2には、二つの光ファイバケーブル16A,16Bについてのみ図示されている。これら二つの光ファイバケーブル16A,16Bの先端が導入されているそれぞれの検知ボックス20は、内部構成が同一であるので、以下、光ファイバケーブル16Aが導入されている検知ボックス20について説明する。
検知ボックス20内には、回転自在に支持された巻回体としてのドラム22と、該ドラム22とともに回転する回転体23と、光ファイバケーブル16Aの先端に接続されて該回転体23の外周に近接して配置された磁場変動検知部としての上記ファラデ近接センサ18Aとが収容されている。上記回転体23とファラデ近接センサ18Aとでロータリーエンコーダ24を形成している。上記ドラム22には、線状体としてのワイヤ21が巻回されており、その巻回始端となる一端はドラム22に固定されず、他端は上記ドラム22から検知ボックス20外に延出し垂下していて錘25が取り付けられている。該錘25は川底となる地盤Pの上面(地盤面)P1上に位置している。該錘25は、単に地盤面P1上に位置しているだけで、地盤内に埋設されているわけではない。上記錘25の形状、材質は想定される河川の水流の流量によって適宜設定すればよいが、例えば河川や海岸に設置されるテトラポット状の形状にすると、通常の状態では川底の地盤に安定して配置できるので好適である。材質としては例えばコンクリートや鋼材とすることができる。本発明にて、巻回体はドラムに限定されず、線状体を巻回できるものであればよく、種々の変形が可能であり、また、線状体もワイヤに限定されない。
上記検知ボックス20からは保護管26が川の水面下まで垂下して設けられていて、上記ワイヤ21は該保護管26内に自由状態で挿通されており、該ワイヤ21の他端である下端が保護管26から出ている。かくして、このようにすると、ワイヤ21は外部に剥き出しにならず保護されることとなり、濁流等の流量の増大や、流木等の浮遊物の接触等で流されたり、振動したり、外傷を受けたりすることがない。
上記ドラム22は、図3(A),(B)に見られるように胴部27、フランジ部28A,28Bそして軸部29A,29Bを有していて、検知ボックス20内に設置された軸受収容部30A,30Bに収められた軸受31A,31Bにより回転自在に支持されている。上記ドラム22の両端に設けられたフランジ部28A,28Bから突出する軸部29A,29Bが対応する軸受31A,31Bによりそれぞれ支持されている。
ドラム22はその胴部27にワイヤ21が巻回されていて、既述のように巻回始端となる一端がドラム22に固定されず、他端側がドラム22から垂下し、検知ボックス20の底壁に形成された窓部20Aを通って吊下し、上記底壁から垂下して設けられた保護管26内を挿通している。
上記ドラム22の一方の軸部29Bは、対応の軸受31Bから突出していて、その先端にロータリーエンコーダ24の回転体23が取り付けられていて、該回転体23が軸部29Bと一体に回転するようになっている。
上記回転体23は、多角形(図示の例では8角形)に作られ、その外周面が多面体となっていて、各面に磁石体23Aが取り付けられている。
上記回転体23の直下には、ロータリーエンコーダ24のファラデ近接センサ18Aが上記回転体23の外周面に近接して配置され、検知ボックス20の底壁に取り付けられた支持体32により支持されている。上記ファラデ近接センサ18Aからは光ファイバケーブル16Aが検知ボックス20外に延びている。ロータリーエンコーダ24には光ファイバ16Aが接続されているため、光送受信装置を設置する監督基地局は橋梁支持体からは数kmから数十km離れた位置に設置することができるので、橋梁が設置される場所が山間部や奥地等であっても、橋梁から離れた場所で光送受信装置の設置が容易な場所に監督基地を設置することができ、遠隔地から橋梁支持体の洗掘の状況を確認することができる。また、検知ボックス20ではファラデ近接センサと光ファイバが接続されているだけなので、電気部品を使用しておらず、落雷等の雷撃の影響を受ける虞れがない。さらには、ファラデ近接センサと光ファイバは光学的に接続されているだけなので機械部品がないため、長期間使用しても故障する可能性が低く安定性が高い。
このように構成される本実施形態装置において、河川の増水により地盤Pが橋梁Bの橋梁支持体B2の基部位置にて洗掘されると、図3で二点鎖線で示されるように、地盤Pが局部的に没するので、地盤面P1上に位置していた錘25はその自重により洗掘深さだけ降下する。すなわち、ワイヤ21は、錘25の降下分(変位分)だけ繰り出され、それに伴いドラム22が回転する。ドラム22の回転により該ドラム22の軸部29Bに取り付けられている回転体23もドラム22と同一量だけ回転する。回転体23の回転により、該回転体23の外周面に取り付けられている複数の磁石体23Aは、回転体23の直下で該回転体23の外周面近接配置されているファラデ近接センサ18Aの前を次々と通過する。したがって、ファラデ近接センサ18Aが置かれている位置における磁場は、磁石体23Aの通過のたびに磁場の強さが変動する。
ファラデ近接センサ18Aは、ファラデ素子を有しており、該ファラデ素子は、上記磁場の強さによって直線偏光の偏波面を回転させて反射光の強度を変化させる特性があるので、このファラデ素子を用いたファラデ近接センサ18Aでは、磁石体23Aの接近の際の磁場の変動により、出力光の光強度の変化として検知する。
かくして、検知ユニット11Aから送信された光が、上記ファラデ近接センサ18Aで反射して出力される際、磁石体23Aの接近毎に出力光の光強度が変化した計測情報信号として出力され、検知ユニット11Aはこれを受信し、その光強度の変化の回数から磁石体23Aの通過回数を知り、これからドラム22の回転数を得る。この回転数を示す信号は深度換算装置12へ送られる。そして、該深度換算装置12が、上記回転数をドラム22の直径およびワイヤ21の巻き径からワイヤ21の繰り出し長さに換算することにより洗掘深度を計測することができる。さらに、該洗掘深度を示す信号は制御装置13へ送られる。そして、制御装置13が、算出された洗掘深度を予め設定された危険深さを示す許容値と比較し、許容値を超え危険状態であると判定したときには、その判定結果を表示装置14が表示する。また、無線連絡装置15は、上記判定結果に対応する無線信号を列車Tあるいは保安区へ向けて送信し、該列車Tの乗務員に報知するようにすることができる。この結果、列車Tを適宜停止させることにより、事故を未然に防止する。
本実施形態では、ワイヤ21の巻回始端はドラム22に固定されていないので、台風や洪水により洗掘で錘25が沈降するだけでなく、錘25が流された場合はワイヤ21がドラム22から繰り出されきった後で、ワイヤ21はドラム22から抜けるのでドラムがワイヤで引張られて破損する虞れがない。かくして、ドラムを破損するのが防止される。
また、復旧する際も、ドラム22にワイヤ21を巻回し直すだけでよいのでドラム22を設置し直す必要もないので、費用を抑制して復旧時間も短縮される。
本実施形態では、複数の橋梁支持体の検知ボックスに至る光ファイバケーブルのそれぞれに対応して複数の検知ユニットを設ける例を図示したが、検知ユニットを複数とせずに、各光ファイバケーブルに対して共通として一つだけ設けて、この共通な検知ユニットが各光ファイバケーブルに順次切り替わり接続されるようにしてもよい。こうすることで検知ユニットを設けることに関してコストの大幅低減が可能となる。
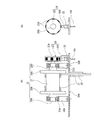
本実施形態では、本発明を、該河川等の地盤の洗掘深度を得る洗掘検知システムに適用した例について説明したが、本発明は、本実施形態に示された例に限らず、変位する物体の変位量を計測するための種々の変形が可能である。このとき、例えば、図4に示される変位計140のような、線状体が巻回され軸線まわりに回転可能な巻回体の回転量を計測する変位計を用いることで各変形例が可能となる。
図4に示される変位計140は、一端側に錘125が取り付けられた線状体121が巻回され上記巻回体(図示せず)と、該巻回体の回転量を計測するロータリーエンコーダ124を有している。ロータリーエンコーダ124は、巻回体と一体に回転するように設けられている回転体123と、該回転体123の回転を検知するためのセンサ118とを有している。センサ118は、回転体123の外周部に近接して位置し、光ファイバケーブル116を通じて光送受信装置111と接続されている。
また、上述の変位計140において、回転体123の外周部の単数または複数位置に磁石体(図示せず)を取り付けるとともに、センサ118として、磁場の変動により出力する光強度が変化するファラデ素子センサを設けることにより、ロータリーエンコーダ124を構成することができる。このような構成とすることにより、センサ118は、回転体123の回転時に該回転体123の周方向での磁石体の移動に伴う磁場の変動を検知し、該センサ118から出力される光強度の変化に基づいて回転体123の回転量ひいては巻回体の回転量を計測できる。
第一の変形例では、本発明は、フェンス等で仕切られた敷地等内への侵入を監視するための侵入監視システムに適用されている。図5(A)は、この第一の変形例に係る侵入監視システムの概要図である。変位計240はフェンスFの下方位置に設けられている。該変位計240の巻回体(図示せず)に巻回されたワイヤ221の一端側部分は巻回体から引き出された後に、横方向に延出してから変向ローラ251で上方へ変向され、フェンスFの上端縁部に接続されている。この第一の変形例では、変位計240は、巻回体がワイヤ221を巻き取る方向(以下、「巻取方向」という)に該巻回体を付勢するような機構(図示せず)が設けられており、ワイヤ221の上記一端側部分が弛まないように該ワイヤ221に対して常に若干の張力が加えられている。
侵入者がフェンスFを乗り越えようとしたとき、その侵入者の体重でフェンスFの上縁部が高さhだけ図5(A)に見られるように下方へ撓む。その結果、巻回体が上記巻取方向へ回転し、ワイヤ221が上記フェンスFの上縁部の撓み量(変位量)に応じた長さだけ上記巻回体に巻き取られ、既述の実施形態と同じ要領で、この巻回体の回転量がロータリーエンコーダ(図示せず)によって計測される。そして、光ファイバケーブル(図示せず)によってロータリーエンコーダと接続された侵入監視装置(図示せず)が、巻回体の回転量をワイヤ221の巻取量ひいてはフェンスの上縁部の撓み量に換算することにより撓み量を計測することができる。該侵入監視装置は、例えば、換算された撓み量が所定量よりも大きい場合に、敷地内への侵入があったことを検知し、警報等を発するようにすることもできる。
第二の変形例では、本発明は、例えば山等の斜面の地滑りの発生を監視するための地滑り監視システムに適用されている。図5(B)は、この第二の変形例に係る地滑り監視システムの概要図である。変位計340は斜面の上部に設けられており、該変位計340からはワイヤ321の一端側部分が斜面に沿って下方へ延びている。該ワイヤ321の一端には、錘325が取り付けられており、該錘325は斜面上に配されている。
上記斜面で地滑りが発生すると、錘325が土砂とともに下方へ移動し、あるいは土砂の崩落により錘325の自重により下方へ移動し、巻回体(図示せず)が回転して該巻回体からワイヤ321が繰り出される。その結果、既述の実施形態と同じ要領で、この巻回体の回転量がロータリーエンコーダ(図示せず)によって計測される。そして、光ファイバケーブル(図示せず)によってロータリーエンコーダと接続された地滑り監視装置(図示せず)が、巻回体の回転量をワイヤ321の繰り出し量(長さ)ひいては錘325の変位量に換算することにより該変位量を計測することができる。該地滑り監視装置は、例えば、換算された変位量が所定の変位量よりも大きい場合に、地滑りが発生したことを検知し、警報等を発するようにすることもできる。
第三の変形例では、本発明は、河川等の水面の位置(以下、単に「水位」という)を監視する水位監視システムに適用されている。図5(C)は、この第三の変形例に係る水位監視システムの概要図である。変位計440は河川敷等に設置されている。該変位計440の巻回体(図示せず)に巻回されたワイヤ421の一端側部分は、上方へ延出してから変向ローラ451,452で横方向そして下方へ変向され、水面に向けて垂下している。該ワイヤ421の一端には、フロート425が取り付けられており、該フロート425は水面上に浮いている。この第三の変形例では、既述した第一の変形例と同様に、変位計440は、巻回体がワイヤ421を巻き取る方向(巻取方向)に回転するような機構(図示せず)が設けられており、ワイヤ421の上記一端側部分が弛まないように該ワイヤ421に対して常に張力が加えられている。
河川の水位が上昇した場合には、フロート425の位置も上昇するので、巻回体が上記巻取方向へ回転し、ワイヤ421がフロート425の上昇分に応じた長さだけ上記巻回体に巻き取られる。その結果、既述の第一の変形例と同じ要領で、この巻回体の回転量がロータリーエンコーダ(図示せず)によって計測される。そして、光ファイバケーブル(図示せず)によってロータリーエンコーダと接続された水位監視装置(図示せず)が、巻回体の回転量をワイヤ421の巻取量ひいてはフロート425そして水位の上昇量に換算することにより該上昇量を計測することができる。該水位監視装置は、例えば、換算された上昇量が所定量よりも大きい場合に、警報等を発するようにすることもできる。
また、河川の水位が下降した場合には、フロート425の位置も下降するので、巻回体が回転し該巻回体からワイヤ421が繰り出される。その結果、既述の実施形態と同じ要領で、この巻回体の回転量がロータリーエンコーダによって計測される。そして、該ロータリーエンコーダに光ファイバケーブルによって接続された水位監視装置が、巻回体の回転量をワイヤ421の繰り出し量(長さ)ひいてはフロート425そして水位の下降量に換算することにより該下降量を計測することができる。該水位監視装置は、例えば、換算された下降量を報知するようにすることもできる。
第三の変形例では、河川等の水位を監視する例を説明したが、上記水位監視装置によれば、例えば、タンク内に貯留された液体の液面の上昇および下降を監視することもできる。
11A〜11D 光送受信装置(検知ユニット)
16A〜16D 光ファイバケーブル
18A〜18D ファラデ素子センサ(ファラデ近接センサ)
21 ワイヤ
22 ドラム
23 回転体
23A 磁石体
24 ロータリーエンコーダ
25 錘
26 保護管
B 橋梁
B1 橋梁本体
B2 橋梁支持体
P 地盤
P1 地盤面
16A〜16D 光ファイバケーブル
18A〜18D ファラデ素子センサ(ファラデ近接センサ)
21 ワイヤ
22 ドラム
23 回転体
23A 磁石体
24 ロータリーエンコーダ
25 錘
26 保護管
B 橋梁
B1 橋梁本体
B2 橋梁支持体
P 地盤
P1 地盤面
Claims (3)
- 変位する物体の変位量を計測するシステムにおいて、
線状体が巻回され軸線まわりに回転可能な巻回体と、該巻回体と上記物体とを接続する上記線状体と、
上記巻回体の回転量を計測するロータリーエンコーダと、
ロータリーエンコーダに接続されて計測情報を通信する光ファイバケーブルと、
上記光ファイバケーブルが接続された光送受信装置と、
を有していることを特徴とする変位量計測システム。 - ロータリーエンコーダは、外周部の単数または複数位置に磁石体が取り付けられた回転体と、該回転体の周方向での磁石体の移動に伴う磁場の変動を検知する磁場変動検知部とを有し、
磁場変動検知部は、磁場の変動により出力する光強度が変化するファラデ素子センサであることとする請求項1に記載の変位量計測システム。 - 線状体が巻回され軸線まわりに回転可能な巻回体の回転量を計測する変位計において、
上記巻回体と、該巻回体の回転量を計測するロータリーエンコーダとを備え、
ロータリーエンコーダは、外周部の単数または複数位置に磁石体が取り付けられた回転体と、磁石体の回転に伴う磁場の変動を検知する磁場変動検知部とを有し、
磁場変動検知部は、磁場の変動により出力する光強度が変化するファラデ素子センサであることを特徴とする変位計。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015078635A JP2016200417A (ja) | 2015-04-07 | 2015-04-07 | 変位量計測システム及び変位計 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015078635A JP2016200417A (ja) | 2015-04-07 | 2015-04-07 | 変位量計測システム及び変位計 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016200417A true JP2016200417A (ja) | 2016-12-01 |
Family
ID=57422661
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015078635A Pending JP2016200417A (ja) | 2015-04-07 | 2015-04-07 | 変位量計測システム及び変位計 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016200417A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200043172A (ko) * | 2018-10-17 | 2020-04-27 | (주)스마트 제어계측 | 교량안전진단방법 |
-
2015
- 2015-04-07 JP JP2015078635A patent/JP2016200417A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200043172A (ko) * | 2018-10-17 | 2020-04-27 | (주)스마트 제어계측 | 교량안전진단방법 |
| KR102161232B1 (ko) * | 2018-10-17 | 2020-09-29 | 주식회사 장민이엔씨 | 교량안전진단방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6216850B2 (ja) | 複合式水文監視システム | |
| EP3524948B1 (en) | System for the automatic wireless monitoring, remotely and in real time, of structures, infrastructures and mountain-slope sectors | |
| US10401169B2 (en) | Enhanced power transmission tower condition monitoring system for overhead power systems | |
| JP6641410B2 (ja) | 地形構造監視システム | |
| US20110012728A1 (en) | Sensor and System to Detect Bridge Scour | |
| JP2016200416A (ja) | 洗掘検知システム | |
| KR101528831B1 (ko) | 싱크홀 탐지 기능을 갖는 지하수 관측 시스템 | |
| KR101421237B1 (ko) | 수위연동형 모니터링 장치 | |
| CN107747935A (zh) | 重力沉降倾斜振动监测仪及其使用方法 | |
| KR101991492B1 (ko) | 자동 지중경사계 | |
| JP2010249790A (ja) | レーザー式水位計 | |
| TW201443316A (zh) | 用於監測橋樑基礎河床沖刷深度及回淤深度之監測裝置 | |
| WO2018023169A1 (en) | Method and apparatus for monitoring elevation | |
| KR101927807B1 (ko) | 2차원 사면 변형 감시장치 | |
| JP2016200417A (ja) | 変位量計測システム及び変位計 | |
| JP6792982B2 (ja) | 移動量計測システム及び変位計 | |
| CN110345909A (zh) | 一种全自动机械式智能分层沉降仪 | |
| JP6822150B2 (ja) | 浸水監視標尺 | |
| JP3895279B2 (ja) | 水盛式沈下/浮上測定の測定点用タンクシステム | |
| ES2766825T3 (es) | Un sistema para la detección del movimiento del cimiento de un aerogenerador | |
| KR102618398B1 (ko) | 지중 배전선로의 습도 감지 시스템 및 그 설치방법 | |
| CN116839680A (zh) | 一种水利工程渗流实时检测装置及其检测方法 | |
| JP6718778B2 (ja) | 洗掘検知システム | |
| JP2004245806A (ja) | 鉛直変位計 | |
| KR102232588B1 (ko) | 무동력 장력유지 구조와 광섬유센서를 이용한 사면 감시 시스템 및 사면 감시 방법 |