JP2016036282A - Bulb vegetable harvester - Google Patents
Bulb vegetable harvester Download PDFInfo
- Publication number
- JP2016036282A JP2016036282A JP2014160876A JP2014160876A JP2016036282A JP 2016036282 A JP2016036282 A JP 2016036282A JP 2014160876 A JP2014160876 A JP 2014160876A JP 2014160876 A JP2014160876 A JP 2014160876A JP 2016036282 A JP2016036282 A JP 2016036282A
- Authority
- JP
- Japan
- Prior art keywords
- foliage
- cutting device
- garlic
- root
- blade
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Harvesting Machines For Root Crops (AREA)
Abstract
Description
本発明は、ニンニクや玉葱等の鱗茎野菜を収穫する自走式の鱗茎野菜収穫機に関し、特に、根切断装置の技術に関する。 The present invention relates to a self-propelled bulb vegetable harvester that harvests bulb vegetables such as garlic and onion, and particularly relates to a technique of a root cutting device.
従来から、前部に掘り取り部を設けて、その後部に搬送装置を設け、搬送装置の中途部に毛根切断刃や茎切断刃を設けたニンニク収穫機は公知となっている(例えば特許文献1参照)。 Conventionally, a garlic harvesting machine in which a digging part is provided in the front part, a conveying apparatus is provided in the rear part, and a follicle cutting blade or a stem cutting blade is provided in the middle part of the conveying apparatus has been known (for example, Patent Documents). 1).
しかし、前記特許文献1に記載のニンニク収穫機の毛根切断刃は、バリカン式に構成され機体に固定されていた。従って、大きな球部を有するニンニクが搬送されて毛根切断刃により根が切断されるときに、根及び球部も切断しまうことがあり、商品価値を低下させる場合があった。 However, the hair root cutting blade of the garlic harvesting machine described in Patent Document 1 is configured as a clipper type and fixed to the machine body. Therefore, when garlic having a large sphere is conveyed and the root is cut by the hair root cutting blade, the root and the sphere may also be cut, which may reduce the commercial value.
本発明は以上の如き状況に鑑みてなされたものであり、ニンニクの根だけを切断し、球部まで切断することがない根切断装置を備えるニンニク収穫機を提供する。 This invention is made | formed in view of the above situations, and provides a garlic harvester provided with the root cutting device which cut | disconnects only the root of a garlic and does not cut | disconnect to a bulb | ball part.
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。 The problem to be solved by the present invention is as described above. Next, means for solving the problem will be described.
即ち、請求項1においては、クローラ式走行装置上に、上下高さ調節可能に設けられて複数条の鱗茎野菜を引き抜き後上方へ搬送する引抜搬送装置と、該引抜搬送装置の前部に設けられて分草するデバイダと、該デバイダの後部に設けられて茎葉部を引き上げる引き起こし装置と、引き起こし装置下方に配置される掘り起し装置と、引抜搬送装置の前後中途部下方に配置される土落とし装置と、引抜搬送装置の後部下方に配置されて鱗茎野菜の茎葉部を切断する茎葉切断装置と、茎葉切断装置の下方に配置されて根を切除する根切断装置と、を備える鱗茎野菜収穫機において、前記根切断装置はバリカン式往復刃で構成され、左右方向の揺動軸を中心に上下揺動自在に支持され、刃先側が上昇するように弾性部材で付勢されるものである。 That is, in Claim 1, it is provided in the front part of the drawing conveyance apparatus provided on the crawler-type traveling device so that vertical height adjustment is possible and drawing a plurality of bulbous vegetables upward after being drawn. And a divider that weeds, a trigger device that is provided at the rear of the divider and lifts up the foliage, a digging device that is disposed below the trigger device, and a soil that is disposed below the front and rear midway portions of the pulling and conveying device A bulb vegetable harvester comprising: a dropping device, a foliage cutting device arranged below the rear portion of the pulling and conveying device to cut the foliage portion of the bulb vegetable, and a root cutting device arranged below the foliage cutting device to cut the root In the machine, the root cutting device is constituted by a clipper reciprocating blade, is supported so as to be swingable up and down around a swing shaft in the left-right direction, and is urged by an elastic member so that the blade tip side is raised.
請求項2においては、前記根切断装置は、前記引抜搬送装置の後部下方に配置されて鱗茎野菜の球部と茎葉部の境界付近の肩部を揃える肩揃え装置の下方に配置されるものである。
In
本発明の効果として、以下に示すような効果を奏する。
鱗茎野菜を引きぬいて後方へ搬送し、肩を揃えながら根部を切断するときに、通常の大きさよりも大きな球部を有する鱗茎野菜が搬送されても、根切断装置は下方へ揺動して逃げることができ、球部まで切断したり、球部を上下から挟んで押し潰すようなことを防止できる。
As effects of the present invention, the following effects can be obtained.
When pulling out bulbous vegetables and transporting them backwards and cutting the roots while aligning the shoulders, even if bulbous vegetables with a ball part larger than the normal size are conveyed, the root cutting device swings downward It is possible to escape, and it is possible to prevent the ball part from being cut or crushed by sandwiching the ball part from above and below.
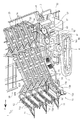
図1から図5において、鱗茎野菜をニンニクとしたニンニク収穫機1の全体構成から説明する。ニンニク収穫機1は畝上に植えられた複数条のニンニクを収穫するものである。本実施形態では4条に植えられたニンニク10を収穫するニンニク収穫機1について説明する。なお、F方向を前方と規定して説明する。
In FIG. 1 to FIG. 5, the overall configuration of a garlic harvester 1 using garlic as a bulb vegetable will be described. The garlic harvesting machine 1 is for harvesting a plurality of garlics planted on a cocoon. In this embodiment, a garlic harvesting machine 1 that harvests
ニンニク収穫機1は、左右のクローラ2・2を備えるクローラ式走行装置上に機体フレーム3を設けてシャーシとし、左右のクローラ2・2は畝を跨いで走行し、植付条の両側の畝間に左右のクローラ2・2が位置するようにして走行しながら収穫する。但し、左右のクローラ2・2の間隔を狭めて、平畝上を走行するようにし、植付条を踏みつけて走行する構成とすることもできる。
The garlic harvesting machine 1 is provided with a
前記機体フレーム3上に上部フレーム8を上下回動可能に支持している。図1、図6に示すように、機体フレーム3の前後中途部の左右両側には支柱3a・3aが立設され、支柱3a・3aの上部に昇降中心軸80が横架され、該昇降中心軸80に上部フレーム8の後下部が上下回動自在に支持される。上部フレーム8は下支持フレーム81とその上側に取り付ける搬送フレーム82からなり、下支持フレーム81は後述するデバイダ11や押えローラ14や土落とし装置16や肩揃え装置17や根切断装置18等を取り付ける。搬送フレーム82は引き起こし装置12や引抜搬送装置15を取り付ける。
An
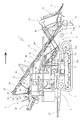
下支持フレーム81の下部と機体フレーム3との間には電動油圧シリンダ6が介装され(図3、図4)、上部フレーム8を昇降中心軸80を中心に昇降可能としている。電動油圧シリンダ6を伸縮させることで引き起こし装置12や掘り起し装置13や引抜搬送装置15の高さを変更可能としている。また、昇降駆動装置を電動油圧シリンダ6とすることで、伸縮長を電気的に容易に制御できるようにしている。
機体フレーム3の左側部上にエンジン4が載置され、機体フレーム3の左後部に操縦支持フレーム3bが立設され、操縦支持フレーム3b上に主クラッチレバーや操向レバー等を備える操縦部5が配置される。つまり、操縦部5の前方にエンジン4が配置される。エンジン4からの動力は左右のクローラ2・2の間に配置したミッションケース7や後述する引き起こし装置12や引抜搬送装置15や根切断装置18や茎葉切断装置20等に動力を伝達して駆動できるようにしている。
An electro-
The
前記搬送フレーム82は、引抜搬送装置15を支持するものであり、図6に示すように、搬送手段となる搬送ベルト27を支持する駆動プーリ24と従動プーリ25とガイドプーリ26を取り付ける取付フレーム82aと、取付フレーム82aを支持する支持フレーム82bと、取付フレーム82aと支持フレーム82bを連結する連結ステー82cと、支持フレーム82b・82b・・・を連結する補強フレーム82dと連結パイプ82eからなる。
The conveying
前記取付フレーム82aは1条に対して左右一対備え、4条収穫するため4対有し、前後方向に配置される。支持フレーム82bは植付条の両側、つまり、左右一対の取付フレーム82a・82aの両側に前後方向に配置される。取付フレーム82aと支持フレーム82bは左右平行に配置され、連結ステー82c・82c・・・が前後適宜間隔をあけて左右方向に配置されて取付フレーム82aと支持フレーム82bを連結固定している。支持フレーム82bは前記下支持フレーム81の上部に固定される。前記補強フレーム82dは側面視三角形状に構成されて支持フレーム82b上に前後一対立設され、左右の各支持フレーム82b・82b・・・上の補強フレーム82d・82d・・・同士は連結パイプ82eで連結されている。つまり、左右に配置した複数の補強フレーム82d・82d・・・は連結パイプ82eで連結され、前後一対配置される。
The
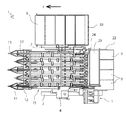
前記搬送フレーム82の支持フレーム82bの前端にはデバイダ11が設けられ、該デバイダ11の後部に引き起こし装置12が配置される。デバイダ11は植付条と植付条の間を通過させて絡まったり寝たりしたニンニク10の茎葉部10bを分草するものである。引き起こし装置12は分草後の茎葉部10bを引き上げるもので、タインを縦回しにして分草した茎を上方に持ち上げるようにしている。引き起こし装置12は植付条の両側に配置されるため、5つ平行に配置される。引き起こし装置12の引き起こしケース12aは下部が支持フレーム82bの前端に固定され、上後部が前記連結パイプ82eに固定される。
A
引き起こし装置12の後下方には掘り起し装置13が配置される。掘り起し装置13は正面視略U字状の掘り起し刃13aと掘り起し刃13aを揺動自在に支持する支持体13bと駆動部13c等からなる。支持体13bは搬送フレーム82前部の左右両側に配置され、掘り起し刃13aの左右両側上部を前後揺動自在に支持する。なお、掘り起し刃13aの上部はピンにより前後揺動自在に支持され、掘り起し刃13aの側面には支持孔が上下方向に所定間隔をあけて複数設けられ、ピンの取付位置を変更することで掘り起し深さを調節可能としている。掘り起し刃13aは本実施形態では4条分掘り起こせる幅としている。掘り起し刃13aの上部には駆動部13cが連結され、前後揺動駆動可能としている。そして、掘り起し刃13aを畝の土内に差し込んでニンニク10の球部10aよりも下方に位置させ、掘り起し刃13aを前後揺動させながら前進することで、畝を崩して土壌を柔らかくし、ニンニク10を容易に引き抜けるようにしている。
A digging and raising
掘り起し装置13の後上部で引抜搬送装置15の前下方には押えローラ14が配置されている。押えローラ14はニンニク10の植付条の両側に配置され、本実施形態では5個配置される。押えローラ14はアームの一端(下端)に回動自在に支持され、アームの他端(上端)は搬送フレーム8の前下部に回動自在に支持され、アームは下方へ回動するようにバネ等で付勢されている。こうして、引抜搬送装置15によりニンニク10を引き抜き上げるときに、押えローラ14により畝を覆うマルチフィルムを下方に押さえ付けて、マルチフィルムが一緒に持ち上げられないようにしている。このような構成とすることによって、マルチフィルムの両側から掘り起し刃13aを畝内に挿入し、マルチフィルムを切り裂くことなく押え付けてニンニク10のみ持ち上げられて引き抜かれて、後上方へ搬送されるのである。
A
引抜搬送装置15は、前低後高に傾斜して設けられ、ニンニク10の茎葉部10bを挟持して上後方へ搬送しながらニンニク10を抜き上げて、後方へ搬送するものである。引抜搬送装置15は搬送フレーム82上に取り付けられる。搬送手段となる駆動プーリ24・24・・・と従動プーリ25・25・・・とガイドプーリ26・26・・・は前記取付フレーム82a・82a・・・の下側に取り付けられる。搬送手段は4条分4組配置され、1組は左右対称に配置されるため、一つの取付フレーム82aに取り付けられる引抜搬送装置15について説明する。
The drawing / conveying
前記取付フレーム82aの後端には駆動プーリ24を固定する搬送駆動軸56が下方に突出して回転自在支持される。取付フレーム82aの前端には従動プーリ25を回転自在に支持する従動軸57(図4)が下方に突出して固定される。駆動プーリ24と従動プーリ25との間には適宜間隔をあけて複数のガイドプーリ26・26・・・が回転自在に支持されるガイドプーリ軸58・58・・・が下方に突出して固定される。駆動プーリ24と従動プーリ25とガイドプーリ26に搬送ベルト27が巻回される。こうして、左右の搬送ベルト27・27の間にニンニク10の茎葉部10bが挟持されて、引抜搬送装置15の前部でニンニク10を引き抜いて、後方へ搬送する。そして、駆動プーリ24と従動プーリ25とガイドプーリ26を支持する軸(搬送駆動軸56、従動軸57、ガイドプーリ軸58)が取付フレーム82aから下方へ突出して設けるため、搬送ベルト27を後述する肩揃え装置17にできるだけ近づけて配置でき、できるだけニンニク10の肩近くから茎葉部10bを上方へ引っ張り姿勢を整えることができ、ガイドプーリ26が邪魔にならないようにしている。
A conveying
図1、図3、図7に示すように、前記押えローラ14よりも後方で引抜搬送装置15の前下方には土落とし装置16が配置される。土落とし装置16は下支持フレーム81に回転自在に支持した回転軸16aと、棒状体を放射状に突設した弾性体16b・16b・・・とにより構成される。弾性体16bは本実施形態では120度間隔をあけて棒状体を3本突設した構造としているが限定するものではなく、4本以上設けてもよく、また、ブラシ等で構成することも可能である。さらに、回転軸16aの一端には駆動プーリ16cが固設され、ベルト駆動可能としている。そして、土落とし装置16は、本実施形態では前後2組配置され、互いに反対方向に回転するように駆動される。こうして、回転軸16aを回転させることで、搬送されるニンニク10の根部に弾性体16bを下方から当接されて、ニンニク10を傷つけることなく、根に付着した土を搬送時に落とすことができるのである。そして、前後の土落とし装置16・16により前方向からと後方向から弾性体16bを当接させるので、根に絡みついた土をきれいに落とすことができるのである。
As shown in FIGS. 1, 3, and 7, a
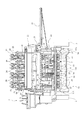
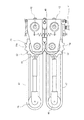
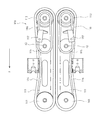
前記引抜搬送装置15の後部下方には4組の肩揃え装置17が前後略水平方向に配設され、下支持フレーム81に支持される。各組の肩揃え装置17は同じ構成であるため、1条の肩揃え装置17について説明する。図7、図8、図9に示すように、肩揃え装置17は左右一対のベルト47・47が肩揃え駆動プーリ43と従動プーリ46の間に巻回され、左右一対のベルト47・47の間を前記引抜搬送装置15と同期させて駆動することにより、ニンニク10の茎葉部10bが引抜搬送装置15により引き上げられ、ニンニク10の球部10aと茎葉部10bの境界部分を肩部として、その肩部が肩揃え装置17のベルト47・47で止められて肩部が揃えられるのである。
Four sets of
肩揃え装置17の前後中途部の下方には根切断装置18が配置される。根切断装置18はバリカン式往復刃が左右方向に配置される。根切断装置18は4条分のニンニク10の根を一度に切断できるように左右方向の長さを引抜搬送装置15の左右幅に合わせた長さとしている。この根切断装置18の構成は後述する。
A
前記肩揃え装置17の後部上には整茎装置19が配置され、更に整茎装置19の後部上に茎葉切断装置20が配置される。整茎装置19は星型に形成された左右一対の保持板19a・19aからなり、保持板19a・19aはゴム等の弾性体板で構成され、左右の保持板19a・19aは互いに当接して回転自在に支持されている。保持板19a・19aの上下方向の高さ(厚さ)はニンニクの茎を残すための長さに一致させている。
茎葉切断装置20は左右一対の円板状の切断刃52・52からなり、整茎装置19の後部上に配置される。茎葉切断装置20の切断刃52・52は水平に配置されて保持板19a・19aの上面に近接して配置される。
こうして、肩揃え装置17を通過したニンニク10は、球部10aから上方の茎葉部10bが整茎装置19により略上下方向を向くように保持されながら後方へ搬送されて、茎葉部10bが略同じ長さで残るように茎葉切断装置20により切断される。なお、茎葉切断装置20により切断された後に球部10aに残す茎葉部10bの長さは、ベルト47の下端から茎葉切断装置20の切断刃52までの距離により決まり、肩揃え駆動軸42上に固定される後述する切断刃駆動スプロケット44の上下に外嵌されるカラーを交換することにより数段階に変更可能としている。但し、この変更構成は限定するものではなく、肩揃え駆動軸42に複数のピン孔を開口して、ピンの差し替えにより変更することもできる。
A
The
In this way, the
また更に、前記肩揃え装置17の後上方、引抜搬送装置15の後部下方には、補助茎葉搬送装置110を設けて、切断後の茎葉部10bを確実に挟持して、後述する排葉コンベア23へ搬送するように構成することも可能である。補助茎葉搬送装置110は図12、図13に示すように、茎葉切断装置20の前上方(根切断装置18の上方)から肩揃え装置17の後上方で排葉コンベア23の上方まで、肩揃え装置17と平行で搬送経路を合わせて配置される。補助茎葉搬送装置110は4条に対応して4組配置されるため、1条の補助茎葉搬送装置110に付いて説明する。
Furthermore, an auxiliary
補助茎葉搬送装置110は、左右一対の補助茎葉搬送フレーム111・111の後部に設けられる左右一対の駆動プーリ112・112と、左右一対の補助茎葉搬送フレーム111・111の前部に設けられる左右一対の従動プーリ113・113と、左右一対の駆動プーリ112・112と左右一対の従動プーリ113・13との間に巻回される左右一対の挟持ベルト114・114と、前記肩揃え駆動軸42・42上に固定される伝動プーリ115・115と、伝動プーリ115・115と駆動プーリ112・112との間に巻回される伝動ベルト116・116等からなる。
The auxiliary
前記駆動プーリ112は二連プーリで構成され、挟持ベルト114と伝動ベルト116を巻回できるようにしている。伝動プーリ115は駆動プーリ112と従動プーリ113の間に配置され、補助茎葉搬送装置110の後部は肩揃え装置17の後部よりも後方に延設される。前記補助茎葉搬送フレーム111・111の後部下面から下方に取付フレーム117・117が垂設され、該取付フレーム117・117の下端は前記搬送伝動ケース40に固定される。こうして、補助茎葉搬送装置110は搬送伝動ケース40に支持される。
The
このような構成において、肩揃え駆動軸42に伝達された動力が、伝動プーリ115、伝動ベルト116を介して駆動プーリ112に伝えられ、該駆動プーリ112から挟持ベルト114を回転駆動できるようにしている。こうして、左右の挟持ベルト114・114が互いに逆方向に回転され、引抜搬送装置15及び肩揃え装置17と同期して回転されることで、引抜搬送装置15により搬送されてきたニンニク10は、その茎葉部10bが肩揃え装置17と補助茎葉搬送装置110により挟持されて、後方へ搬送され、肩を揃えられた後、根部が切断され、球部10aの上部の茎葉部10bが整茎装置19により整えられて切断されるときに、引抜搬送装置15よりも低い位置の補助茎葉搬送装置110と肩揃え装置17との上下で挟持されているので、茎葉部10bが抜けることなく確実に安定して搬送されながら切断することができる。そして、排葉コンベア23にも確実に載せることができる。
In such a configuration, the power transmitted to the shoulder
前記肩揃え装置17の後端下方に、受止め解放可能に受樋21が配置され(図4)、その下方にコンテナ台22が配置される。コンテナ台22上に4条分のコンテナ9・9・・・を左右に載置して、前記肩揃え装置17の後端から落下するニンニク10を収納できるようにしている。受樋21は通常解放状態として、コンテナ9が満杯となると、受樋21を受止め位置とし、前記肩揃え装置17から落下するニンニク10を一時受け止め、コンテナ9を交換する間受樋21で受けておく、交換後は解放して交換したコンテナ9にニンニク10を収納できるようにしている。
Under the rear end of the
また、前記肩揃え装置17の上後方であって引抜搬送装置15の後端下方には切断後の葉を側方へ排出する排葉コンベア23が配置される。排葉コンベア23はベルトコンベアからなり、左右方向で操縦部5と反対側の右側に排出するように構成している。
そして、引抜搬送装置15の右側方に空のコンテナを載置しておく予備コンテナ台30が上方へ折り畳み収納可能に配置されている。
Further, a
A
次に、駆動構成について、図1、図2、図3、図7より説明する。
前記エンジン4の出力軸には出力プーリ87が固設され、該出力プーリ87からベルトを介してその後方に配置された走行駆動プーリ90に動力が伝達される。走行駆動プーリ90は走行駆動軸91に固設され、該走行駆動軸91からプーリやベルト等を介してミッションケース7に動力が伝達されるようにしている。
Next, the drive configuration will be described with reference to FIGS. 1, 2, 3, and 7. FIG.
An
また、前記走行駆動軸91上には伝動プーリが固設され、ベルトを介してその上方に設けた作業駆動プーリ92に動力が伝達される。作業駆動プーリ92は前記昇降中心軸80上に固設され、該昇降中心軸80の右側に伝動プーリ93とアーム89が固設され、該アーム89の回動によるクランク運動を根切断装置18に伝えて往復刃を駆動する。前記伝動プーリ93からはベルト94を介して前記土落とし装置16の駆動プーリ16c・16cと伝動プーリ88に動力を伝達して土落とし装置16を駆動する。更に、伝動プーリ88からベルト・プーリを介して掘り起し駆動軸95に動力を伝達し掘り起し装置13を駆動する。掘り起し駆動軸95の左側端に固設したプーリよりベルトを介して引き起こし装置12の引き起こし駆動軸96に動力を伝達して引き起こし装置12を駆動する。
Further, a transmission pulley is fixed on the
また、前記昇降中心軸80の左側に伝動プーリが固設され、該伝動プーリよりベルト、プーリを介して搬送伝動ケース40の入力軸41に動力が伝達される。搬送伝動ケース40は前記下支持フレーム81の後部上に左右方向に横設され、図7、図8、図9に示すように、搬送伝動ケース40の上面から肩揃え駆動軸42・42・・・が上方に突出されている。肩揃え駆動軸42には肩揃え駆動プーリ43と切断刃駆動スプロケット44が固設され、肩揃え駆動プーリ43からベルト47を介して肩揃え装置17と整茎装置19を駆動し、切断刃駆動スプロケット44よりチェーンを介して茎葉切断装置20を駆動する。
A transmission pulley is fixed to the left side of the elevating
更に、前記肩揃え駆動軸42の上端よりユニバーサルジョイント54、伝動軸55、ユニバーサルジョイント59を介して搬送駆動軸56に動力を伝達し、引抜搬送装置15を駆動する。
また、前記搬送伝動ケース40の入力軸41上には伝動プーリ97が固設され、該伝動プーリ97よりベルト、プーリを介して排葉コンベア23の入力軸98に動力が伝達され、排葉コンベア23を駆動するようにしている。
Further, power is transmitted from the upper end of the shoulder
A
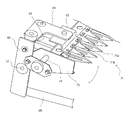
前記根切断装置18は、図8、図10、図11に示すように、駆動手段70と、切断刃71(受刃71aと摺動刃71b)と、切断刃フレーム73と、揺動軸74と、弾性部材となるバネ75とからなる。
As shown in FIGS. 8, 10, and 11, the
切断刃フレーム73は、切断刃71(受刃71aと摺動刃71b)を支持するものであり、切断刃フレーム73の左右両側に配置される前後方向の側板からは左右水平方向に揺動軸74・74が外側方に突出される。該揺動軸74・74は前記下支持フレーム81に揺動自在に支持される。前記切断刃フレーム73の左右一側(本実施形態では左側)の側板から係止ピン76が突設され、該係止ピン76にバネ75の下端が係止され、バネ75の上端は前記下支持フレーム81に係止されている。こうして、根切断装置18の前部が上方へ回動するようにバネ75により付勢されている。また、前記切断刃フレーム73の側板の前部から側方にストッパ77が突設されて前記下支持フレーム81に当接可能に配置され、切断刃71の上昇位置が設定されている。
The
前記切断刃フレーム73には、切断刃71を構成する鋸刃状の受刃71aが左右方向に固定され、該受刃71aに鋸刃状の摺動刃71bが左右摺動自在に嵌合される。該摺動刃71bの一側(本実施形態では右側)上にはブラケット63が固定され、該ブラケット63に駆動手段70が連結される。駆動手段70は、前記ブラケット63にベルクランクアーム64の一端が枢結され、該ベルクランクアーム64の中途部が切断刃フレーム73に回転自在に支持され、ベルクランクアーム64の他端がL字状のステー65を介して揺動アーム66の上部に揺動自在に連結される。揺動アーム66は上下中途部が切断刃フレーム73の側板から突設した揺動支持軸67に揺動自在に支持される。前記揺動アーム66の下部が連結ロッド68の後部に枢支され、連結ロッド68の前部が前記アーム89に枢結される。
A saw blade-shaped
こうして、前記昇降中心軸80が回動されることにより、アーム89が回転されてクランク運動をし、連結ロッド68が前後往復動して揺動アーム66を前後に揺動させ、ステー65を介してベルクランクアーム64を揺動して、ブラケット63を介して摺動刃71bを左右往復動させ根を切断できるようにしている。
In this way, when the elevating
そして、球部10aの大きいニンニク10が搬送されて、根切断装置18に至ると、球部10aの下部が切断刃71に当たり、その先端は揺動軸74を中心にバネ75の付勢力に抗して下方へ回動して逃げる。こうして、切断刃71はニンニク10の大きさに応じて上下回動し、ニンニク10が切断刃71と肩揃え装置17との間で押し潰されないようにするとともに、球部10aの下部の根が残らないように切断する。
なお、前記バネ75は左右一側に配置したが、中央側や両側にも取り付けることが可能であり、取付位置及び個数は限定するものではない。また、切断刃71は左右に分割し、両側から駆動する構成とすることもできる。つまり、左右に分割した切断刃71・71は左右それぞれ左右両側に配置した駆動手段70・70により駆動され、左右の切断刃71・71はそれぞれバネ75・75により前部が上方へ回動するように付勢され、左右の切断刃71・71はそれぞれ独立して揺動自在とされ、2条毎に球部10aの大きさにあわせて揺動できるようにすることもできる。
Then, when the
In addition, although the said
以上のように、クローラ式走行装置上に、上下高さ調節可能に設けられて複数条の鱗茎野菜となるニンニク10を引き抜き後上方へ搬送する引抜搬送装置15と、該引抜搬送装置15の前部に設けられて分草するデバイダ11と、該デバイダ11の後部に設けられて茎葉部を引き上げる引き起こし装置12と、引き起こし装置12下方に配置される掘り起し装置13と、引抜搬送装置15の後部下方に配置されて茎葉部10bを切断する茎葉切断装置20と、茎葉切断装置20の下方に配置されて根を切除する根切断装置18と、を備える鱗茎野菜収穫機において、前記根切断装置18はバリカン式往復刃で構成され、左右方向の揺動軸74を中心に上下揺動自在に支持され、刃先側が上昇するように弾性部材となるバネ75で付勢されるので、ニンニク10を引きぬいて後方へ搬送し、肩を揃えながら根部を切断するときに、通常の大きさよりも大きな球部10aを有するニンニク10が搬送されても、根切断装置18は下方へ揺動して逃げることができ、球部10aまで切断したり、球部10aを上下から挟んで押し潰すようなことを防止できる。
As described above, on the crawler type traveling device, the pulling / conveying
また、前記根切断装置18は、前記引抜搬送装置15の後部下方に配置されてニンニク10の球部10aと茎葉部10bの境界付近の肩部を揃える肩揃え装置17の下方に配置されるので、ニンニク10は肩揃え装置17により拘束された状態となって、根切断装置18により根を切除するときに位置がずれたり、傾いたりすることがなく、根を正確に切除することが可能となる。
In addition, the
1 ニンニク収穫機
2 クローラ
11 デバイダ
12 引き起こし装置
13 掘り起し装置
15 引抜搬送装置
17 肩揃え装置
18 根切断装置
20 茎葉切断装置
74 揺動軸
DESCRIPTION OF SYMBOLS 1
Claims (2)
2. The root cutting device is disposed below a shoulder aligning device that is disposed below a rear portion of the pulling and conveying device and aligns a shoulder portion near a boundary between a bulbous portion and a foliage portion of a bulb vegetable. A bulb vegetable harvester as described in 1.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014160876A JP6578535B2 (en) | 2014-08-06 | 2014-08-06 | Bulb vegetable harvester |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014160876A JP6578535B2 (en) | 2014-08-06 | 2014-08-06 | Bulb vegetable harvester |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016036282A true JP2016036282A (en) | 2016-03-22 |
| JP6578535B2 JP6578535B2 (en) | 2019-09-25 |
Family
ID=55527971
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014160876A Active JP6578535B2 (en) | 2014-08-06 | 2014-08-06 | Bulb vegetable harvester |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6578535B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107548661A (en) * | 2017-10-17 | 2018-01-09 | 山东农业大学 | A kind of self-propelled multirow garlic combined harvester |
| JP7414760B2 (en) | 2021-03-22 | 2024-01-16 | ヤンマーホールディングス株式会社 | vegetable harvester |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0541622Y2 (en) * | 1988-08-19 | 1993-10-21 | ||
| JPH078065A (en) * | 1993-06-21 | 1995-01-13 | Kubota Corp | Onion harvester |
| JPH07322737A (en) * | 1994-05-31 | 1995-12-12 | Matsuo Aizawa | Mower |
| JPH0856446A (en) * | 1994-08-22 | 1996-03-05 | Hiroaki Muramatsu | Mulched onion harvester |
| US20020185284A1 (en) * | 2001-06-11 | 2002-12-12 | Bendix Richard D. | Mechanical harvester for harvesting bulb crops |
| JP2006034120A (en) * | 2004-07-23 | 2006-02-09 | Seirei Ind Co Ltd | Rhizome harvester |
| JP2006288226A (en) * | 2005-04-07 | 2006-10-26 | Seirei Ind Co Ltd | Root vegetable harvester |
-
2014
- 2014-08-06 JP JP2014160876A patent/JP6578535B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0541622Y2 (en) * | 1988-08-19 | 1993-10-21 | ||
| JPH078065A (en) * | 1993-06-21 | 1995-01-13 | Kubota Corp | Onion harvester |
| JPH07322737A (en) * | 1994-05-31 | 1995-12-12 | Matsuo Aizawa | Mower |
| JPH0856446A (en) * | 1994-08-22 | 1996-03-05 | Hiroaki Muramatsu | Mulched onion harvester |
| US20020185284A1 (en) * | 2001-06-11 | 2002-12-12 | Bendix Richard D. | Mechanical harvester for harvesting bulb crops |
| JP2006034120A (en) * | 2004-07-23 | 2006-02-09 | Seirei Ind Co Ltd | Rhizome harvester |
| JP2006288226A (en) * | 2005-04-07 | 2006-10-26 | Seirei Ind Co Ltd | Root vegetable harvester |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107548661A (en) * | 2017-10-17 | 2018-01-09 | 山东农业大学 | A kind of self-propelled multirow garlic combined harvester |
| JP7414760B2 (en) | 2021-03-22 | 2024-01-16 | ヤンマーホールディングス株式会社 | vegetable harvester |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6578535B2 (en) | 2019-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014236681A (en) | Root crop harvester | |
| JP2016036278A (en) | Bulb vegetable harvester | |
| JP6578535B2 (en) | Bulb vegetable harvester | |
| JP6476428B2 (en) | Self-propelled bulb vegetable harvester | |
| JP5156915B2 (en) | Harvesting machine for rhizome crops | |
| JP2008048642A (en) | Harvester of underground stem crop | |
| JP2020141568A (en) | Root crop harvesting machine | |
| JP6484833B2 (en) | Bulb vegetable harvester | |
| JP4795710B2 (en) | Root crop harvesting machine | |
| JP6484835B2 (en) | Bulb vegetable harvester | |
| JP2014082969A (en) | Root vegetable harvester | |
| JP2007089540A (en) | Harvester of root vegetable | |
| JP6484834B2 (en) | Bulb vegetable harvester | |
| JP3763943B2 (en) | Reed holding mechanism of traveling stem processing machine | |
| JP2004329004A (en) | Apparatus for removing soil in agricultural product harvester | |
| JP5137144B2 (en) | Crop digging equipment | |
| JP2019004727A (en) | Welsh onion harvester | |
| JP6688028B2 (en) | Forage-raising device for subterranean crop harvester | |
| JP7220467B2 (en) | vegetable harvester | |
| JP2019083723A (en) | Bulb vegetable harvester | |
| JP2004159574A (en) | Farming implement | |
| JP5874391B2 (en) | Crop harvesting machine | |
| JP2000004629A (en) | Harvester | |
| JP2019004728A (en) | Welsh onion harvester | |
| JP2020031613A (en) | Crop drawing machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170731 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180803 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190730 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190801 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6578535 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |