JP2016014423A - In-wheel motor drive device - Google Patents
In-wheel motor drive device Download PDFInfo
- Publication number
- JP2016014423A JP2016014423A JP2014136463A JP2014136463A JP2016014423A JP 2016014423 A JP2016014423 A JP 2016014423A JP 2014136463 A JP2014136463 A JP 2014136463A JP 2014136463 A JP2014136463 A JP 2014136463A JP 2016014423 A JP2016014423 A JP 2016014423A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- wheel
- rotating member
- side rotating
- casing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Abstract
Description
本発明は、インホイールモータ駆動装置の回転要素、例えば軸、を回転自在に支持する軸受に関する。 The present invention relates to a bearing that rotatably supports a rotating element, for example, a shaft, of an in-wheel motor drive device.
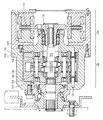
従来のインホイールモータ駆動装置として例えば特開2013−148198号公報(特許文献1)に記載されるものが知られている。特許文献1のインホイールモータ駆動装置は、電動車両の車輪内部に配置され、コンパクトで高い減速比が得られるサイクロイド減速機を備える。従来のインホイールモータ駆動装置を示す図7の縦断面図を参照して、電動モータ110のロータ111は軸受112によって回転自在に支持される。減速機120の入力軸121は軸受122によって回転自在に支持される。減速機120の出力回転を取り出す一対の環状板123は軸受124によってそれぞれ回転自在に支持される。
As a conventional in-wheel motor drive device, for example, a device described in JP 2013-148198 A (Patent Document 1) is known. The in-wheel motor drive apparatus of patent document 1 is arrange | positioned inside the wheel of an electric vehicle, and is provided with the cycloid reducer which is compact and can obtain a high reduction ratio. Referring to the longitudinal sectional view of FIG. 7 showing a conventional in-wheel motor drive device, the rotor 111 of the
しかし、上記従来のインホイールモータ駆動装置にあっては、さらに改善すべき点があることを本発明者は見いだした。つまり入力軸121には一対の偏心軸部125が偏心して設けられている。一対の偏心軸部125は偏心運動による遠心力で発生する振動を互いに打ち消すために周方向180°位相を変えて設けられているが、偏心軸部125は入力軸121の回転軸線を中心として高速で公転する場合に、加工誤差に基づく振動を完全に打ち消すことができず入力軸121には振動が生じる懸念があることを本発明者は見いだした。かかる入力軸121の振動は、軸受122と、環状板123と、軸受124と、内歯車126と、支持ピン127を順次経て、ケーシング129に伝達する。このためインホイールモータ駆動装置の外郭をなすケーシング129を含め、インホイールモータ駆動装置の各部材が振動する。そうすると、電動車両の振動が伝達されると乗り心地が損なわれたり、振動を原因として異音が発生したりする懸念がある。また図示はしなかったが、部品をインホイールモータ駆動装置にねじ止めするねじ止め部が緩んだりする懸念がある。
However, the present inventor has found that there is a point to be further improved in the conventional in-wheel motor driving device. That is, the
特許文献1に採用されるサイクロイド減速機に限らず、インホイールモータ駆動装置においては、インホイールモータ駆動装置の内部で高速回転する回転要素の振動が、インホイールモータ駆動装置のケーシングに伝達することを極力低減することが望ましい。 In the in-wheel motor drive device as well as the cycloid reducer adopted in Patent Document 1, vibration of a rotating element that rotates at high speed inside the in-wheel motor drive device is transmitted to the casing of the in-wheel motor drive device. It is desirable to reduce as much as possible.
本発明は、上述の実情に鑑み、インホイールモータ駆動装置の内部の振動が、インホイールモータ駆動装置の外郭をなすケーシングに伝達することを低減することを目的とする。 In view of the above circumstances, an object of the present invention is to reduce transmission of internal vibrations of an in-wheel motor drive device to a casing that forms an outline of the in-wheel motor drive device.
この目的のため第1発明によるインホイールモータ駆動装置は、モータ側回転部材を駆動するモータ部と、モータ側回転部材の回転を減速して車輪側回転部材に出力する減速部とを備え、モータ側回転部材をケーシング側部材に回転自在に支持する軸受、および/または車輪側回転部材をケーシング側部材に回転自在に支持する軸受は、外輪および複数の転動体を含む転がり軸受であり、外輪とケーシング側部材との間には、高分子材料からなる緩衝部材が介在することを特徴とする。 For this purpose, the in-wheel motor drive device according to the first invention comprises a motor section for driving the motor side rotating member, and a speed reducing section for decelerating the rotation of the motor side rotating member and outputting it to the wheel side rotating member. The bearing that rotatably supports the side rotating member on the casing side member and / or the bearing that rotatably supports the wheel side rotating member on the casing side member is a rolling bearing including an outer ring and a plurality of rolling elements. A buffer member made of a polymer material is interposed between the casing side member and the casing side member.
また第2発明によるインホイールモータ駆動装置は、モータ側回転部材を駆動するモータ部と、モータ側回転部材の回転を減速して車輪側回転部材に出力する減速部とを備え、モータ側回転部材をケーシング側部材に回転自在に支持する軸受、および/または車輪側回転部材をケーシング側部材に回転自在に支持する軸受は、内輪および複数の転動体を含む転がり軸受であり、内輪と該内輪を貫通するモータ側回転部材および/または車輪側回転部材との間には、高分子材料からなる緩衝部材が介在することを特徴とする。 The in-wheel motor drive device according to the second invention includes a motor unit that drives the motor-side rotation member, and a reduction unit that decelerates the rotation of the motor-side rotation member and outputs it to the wheel-side rotation member. The bearing that rotatably supports the casing side member and / or the bearing that rotatably supports the wheel side rotating member on the casing side member is a rolling bearing including an inner ring and a plurality of rolling elements. A buffer member made of a polymer material is interposed between the penetrating motor-side rotating member and / or the wheel-side rotating member.
かかる第1および第2発明によれば、モータ側回転部材および車輪側回転部材といったインホイールモータ駆動装置内部の回転部材と、インホイールモータ駆動装置の外郭をなす非回転部材のケーシングと、回転部材をケーシングに支持する転がり軸受との支持関係において、回転部材とケーシングの間に高分子材料からなる緩衝部材が介在することから、緩衝部材が振動を吸収し回転部材の振動がケーシングに伝達することを低減することができる。 According to the first and second aspects of the present invention, the rotating member inside the in-wheel motor driving device such as the motor-side rotating member and the wheel-side rotating member, the casing of the non-rotating member that forms the outline of the in-wheel motor driving device, and the rotating member In the support relationship with the rolling bearing that supports the casing, since the buffer member made of a polymer material is interposed between the rotating member and the casing, the buffer member absorbs vibration and the vibration of the rotating member is transmitted to the casing. Can be reduced.
また第1および第2発明によれば軸受の外輪または内輪と、ケーシングまたは回転部材といった内外輪の取り付け先になる相手部材との間に、高分子材料からなる緩衝部材が介在することから、軸受の熱膨張率と相手部材との熱膨張率が異なる場合、緩衝部材が内/外輪と相手部材の熱膨張差を吸収するよう設計する。したがって温度変化に係わらず内/外輪と相手部材の嵌め合い状態、例えば接触面圧、を所定の範囲に保ち、クリープを防止することができる。 According to the first and second inventions, since the buffer member made of a polymer material is interposed between the outer ring or inner ring of the bearing and the counterpart member to which the inner and outer rings are attached, such as the casing or the rotating member, the bearing When the coefficient of thermal expansion differs from that of the mating member, the buffer member is designed to absorb the difference in thermal expansion between the inner / outer ring and the mating member. Therefore, regardless of the temperature change, the fitting state of the inner / outer ring and the mating member, for example, the contact surface pressure, can be kept within a predetermined range and creep can be prevented.
なお転がり軸受は、一例として回転部材とは別部材の内輪と、ケーシング側部材とは別部材の外輪の双方を有する。あるいは他の例として、内輪が別部材としてではなく回転部材に一体形成されていてもよい。あるいはさらに他の例として、外輪が別部材としてではなくケーシング側部材に一体形成されていてもよい。 As an example, the rolling bearing has both an inner ring that is a member different from the rotating member and an outer ring that is a member different from the casing side member. Alternatively, as another example, the inner ring may be integrally formed with the rotating member rather than as a separate member. Alternatively, as still another example, the outer ring may be integrally formed with the casing side member, not as a separate member.
ケーシング側部材は、インホイールモータ駆動装置の外郭をなすケーシングの他、ケーシングに附設される部材であってもよいし、非回転の固定部材であるか回転する部材であるかを問わず転がり軸受からみてケーシングに近い方の部材であればよい。 The casing-side member may be a member attached to the casing in addition to the casing that forms the outline of the in-wheel motor drive device, or a rolling bearing regardless of whether it is a non-rotating fixed member or a rotating member. Any member may be used as long as it is closer to the casing.
本発明の一実施形態として、モータ側回転部材はモータ部の一部であり該モータ部から回転を出力するモータ回転軸と、減速部の一部であり該減速部に回転を入力する減速部入力軸とを含み、緩衝部材はモータ回転軸をケーシング側部材に回転自在に支持する軸受に設けられる。他の実施形態として、緩衝部材は減速部入力軸をケーシング側部材に回転自在に支持する軸受に設けられる。 As one embodiment of the present invention, the motor-side rotating member is a part of the motor unit, and a motor rotating shaft that outputs rotation from the motor unit, and a speed reducing unit that is part of the speed reducing unit and inputs rotation to the speed reducing unit The buffer member is provided on a bearing that rotatably supports the motor rotation shaft on the casing side member. As another embodiment, the buffer member is provided in a bearing that rotatably supports the speed reducing portion input shaft on the casing side member.
高分子材料からなる緩衝部材の形状、寸法、および個数は特に限定されない。本発明の一実施形態として、緩衝部材は内輪の内周面または外輪の外周面に沿って延びる環状体である。かかる実施形態によれば、内輪または外輪の全周に亘って緩衝部材が介在することから、振動の伝達を効果的に低減することができる。環状体の軸方向幅寸法および径方向厚み寸法は特に限定されない。環状体は、例えば無端バンドのような帯状体である。環状体の軸方向幅寸法は、周方向位置に係わらず一定であるのが好ましい。また環状体の径方向厚み寸法も、周方向位置に係わらず一定であるのが好ましい。他の実施形態として、緩衝部材は周方向に間隔を空けて転がり軸受に設けられてもよい。 The shape, size, and number of the buffer members made of the polymer material are not particularly limited. As one embodiment of the present invention, the buffer member is an annular body extending along the inner peripheral surface of the inner ring or the outer peripheral surface of the outer ring. According to this embodiment, since the buffer member is provided over the entire circumference of the inner ring or the outer ring, transmission of vibration can be effectively reduced. The axial width dimension and the radial thickness dimension of the annular body are not particularly limited. The annular body is a strip-like body such as an endless band. It is preferable that the axial width dimension of the annular body is constant regardless of the circumferential position. The radial thickness of the annular body is also preferably constant regardless of the circumferential position. As another embodiment, the buffer member may be provided on the rolling bearing with an interval in the circumferential direction.
高分子材料からなる緩衝部材とは、要するに樹脂であり、緩衝部材に入力される振動を吸収・減衰する性能が高いほど良い。また緩衝部材は、軸受に用いられることから耐油性が高く、潤滑油に長期間晒されても劣化し難いことが望まれる。また緩衝部材は、インホイールモータ駆動装置の内部に設けられることから、耐熱性が高く、150℃の高温でも劣化しないことが望まれる。本発明の好ましい実施形態として、緩衝部材はフッ素系高分子材料またはアクリル系高分子材料を主成分とする弾性体である。かかる実施形態によれば、緩衝部材の耐油性および耐熱性を確保することができる。フッ素系高分子材料を用いる弾性体として例えば、フッ素ゴム、フロオロシリコーンゴム等が挙げられる。アクリル系高分子材料を主成分とする弾性体として例えば、アクリルゴム等が挙げられる。他の実施形態として緩衝部材は、他の種類の高分子材料から構成されてもよい。 The buffer member made of a polymer material is basically a resin, and the higher the performance of absorbing and attenuating vibrations input to the buffer member, the better. Further, since the buffer member is used for a bearing, it is desired that the buffer member has high oil resistance and is hardly deteriorated even if it is exposed to lubricating oil for a long time. Further, since the buffer member is provided inside the in-wheel motor drive device, it is desired that the buffer member has high heat resistance and does not deteriorate even at a high temperature of 150 ° C. As a preferred embodiment of the present invention, the buffer member is an elastic body mainly composed of a fluorine polymer material or an acrylic polymer material. According to this embodiment, the oil resistance and heat resistance of the buffer member can be ensured. Examples of the elastic body using a fluorine-based polymer material include fluorine rubber and fluorosilicone rubber. Examples of the elastic body mainly composed of an acrylic polymer material include acrylic rubber. In another embodiment, the buffer member may be made of other types of polymer materials.
本発明のケーシング側部材は、非回転の固定部材であってもよいし、回転する部材であってもよい。本発明の一実施形態として、モータ側回転部材は車輪側回転部材に同軸配置され、車輪側回転部材の端部にはモータ側回転部材の端部を受け入れる円形凹部が形成される。そしてモータ側回転部材をケーシング側部材に回転自在に支持する軸受は、円形凹部の内周面とモータ側回転部材の外周面の間に画成される環状空間に設置され、緩衝部材を伴う。 The casing-side member of the present invention may be a non-rotating fixed member or a rotating member. As one embodiment of the present invention, the motor-side rotating member is coaxially arranged with the wheel-side rotating member, and a circular recess that receives the end of the motor-side rotating member is formed at the end of the wheel-side rotating member. The bearing that rotatably supports the motor-side rotating member on the casing-side member is installed in an annular space defined between the inner peripheral surface of the circular recess and the outer peripheral surface of the motor-side rotating member, and includes a buffer member.
本発明の一実施形態として、減速部はモータ側回転部材に偏心して設けられた一対の偏心部と、偏心部に相対回転可能に保持されモータ側回転部材の回転に伴って該モータ側回転部材の軸線を中心とする公転運動を行う一対の公転部材と、公転部材の外周に係合して公転部材の自転運動を生じさせる外周係合部材と、公転部材の自転運動をモータ側回転部材の軸線を中心とする回転運動に変換して車輪側回転部材へ出力する運動変換機構とを有する。かかる実施形態によれば、サイクロイド減速機の内部から発生する振動を低減することができる。他の実施形態として、減速部は他の歯車組であってもよい。 As one embodiment of the present invention, the speed reducing portion is eccentrically provided on the motor-side rotating member, and the motor-side rotating member is held by the rotation of the motor-side rotating member that is held by the eccentric portion so as to be relatively rotatable. A pair of revolving members that revolve around the axis of the outer periphery, an outer peripheral engagement member that engages with the outer periphery of the revolving member to cause the revolving motion of the revolving member, and the rotational movement of the revolving member of the motor side rotating member. And a motion conversion mechanism that converts the rotational motion about the axis to the wheel-side rotating member. According to this embodiment, vibration generated from the inside of the cycloid reduction gear can be reduced. As another embodiment, the reduction gear may be another gear set.
このように本発明によれば、インホイールモータ駆動装置において、減速部内部の回転部材から発生する振動を低減することができる。したがってインホイールモータ駆動装置を搭載する電気自動車あるいはハイブリッド車両において乗り心地性能が改善される。また振動を原因とする不具合が生じることがなく、インホイールモータ駆動装置の耐久性が向上する。 As described above, according to the present invention, in the in-wheel motor drive device, it is possible to reduce the vibration generated from the rotating member inside the speed reducing portion. Therefore, riding comfort performance is improved in an electric vehicle or a hybrid vehicle equipped with an in-wheel motor drive device. Further, there is no problem caused by vibration, and the durability of the in-wheel motor drive device is improved.
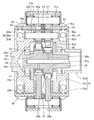
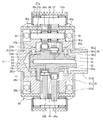
以下、本発明の実施の形態を、図面に基づき詳細に説明する。図1は、本発明の一実施形態になるインホイールモータ駆動装置を示す縦断面図である。図2は図1のII−IIにおける横断面図である。図3は、図1中の減速部を拡大して示す縦断面図である。図4は、図3中の転がり軸受を取り出して示す縦断面図である。インホイールモータ駆動装置21は、駆動力を発生させるモータ部Aと、モータ部Aの回転を減速して出力する減速部Bと、減速部Bからの出力を駆動輪に伝える車輪ハブ軸受部Cとを備える。
Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. FIG. 1 is a longitudinal sectional view showing an in-wheel motor drive device according to an embodiment of the present invention. 2 is a cross-sectional view taken along the line II-II in FIG. FIG. 3 is an enlarged longitudinal sectional view showing the speed reducing portion in FIG. 4 is a longitudinal sectional view showing the rolling bearing in FIG. The in-wheel
モータ部Aはモータ部の外郭を形成するモータケーシング22a、ポンプケーシング22p、およびモータカバー22tを有し、減速部Bは減速部の外郭を形成する減速部ケーシング22bを有する。これらモータケーシング22a、ポンプケーシング22p、モータカバー22t、および減速部ケーシング22bは、ボルト等により、あるいは一体形成により、相互に結合して1個のケーシング22を構成する。そしてケーシング22には、車輪ハブ軸受部Cの外輪部材33aが取付固定される。インホイールモータ駆動装置21は、例えば電気自動車のホイールハウジング内に取り付けられる。この電気自動車は乗用自動車であり、一般的なエンジン自動車と同様に公道を走行可能である。
The motor part A has a
モータ部Aは、円筒形状のモータケーシング22a内周に固定されるステータ23と、ステータ23の内側に径方向に開いた隙間を介して対面する位置に配置されるロータ24と、ロータ24の内側に連結固定されてロータ24と一体回転するモータ回転軸35とを備えるラジアルギャップモータである。あるいは図示はしなかったが、モータ部Aはアキシャルギャップモータであってもよい。
The motor part A includes a
モータケーシング22aは、モータ回転軸35の軸線Oを中心とし、この軸線方向に延びる。ケーシング22の一部であるポンプケーシング22pは、略円板形状の隔壁であって、モータ部Aの軸線O方向一方端で減速部Bとの境界を形成するとともに、転がり軸受37を介してモータ回転軸35の一方端部を回転自在に支持する。さらにポンプケーシング22pは、オイルポンプ51を備える。ケーシング22の一部であるモータカバー22tは、略円板形状であって、モータ部Aの軸線O方向他方端でモータ部Aの端面を形成するとともに、転がり軸受36を介してモータ回転軸35の他方端部を回転自在に支持する。モータカバー22tはモータ部Aの端部であるとともに、インホイールモータ駆動装置21の端部でもある。
The
モータ回転軸35の一端は、減速部Bの内部に回転自在に設けられた減速部入力軸25と結合する。この結合はセレーション嵌合であり、管状に形成されたモータ回転軸35の端部開口に、先細に形成された減速部入力軸25が挿入固定される。
One end of the
減速部Bは、サイクロイド減速機であって、モータ部Aの軸線O方向一方側に同軸配置され、円筒形状の減速部ケーシング22bと、減速部ケーシング22bに取り付け固定される外ピン保持部45と、軸線Oに沿って延びる減速部入力軸25と、減速部入力軸25に形成された一対の偏心部25a,25bと、それぞれの偏心部25a,25bに回転自在に保持される公転部材としての一対の曲線板26a,26bと、曲線板26a,26bの外周部に係合する外周係合部材としての複数の外ピン27と、軸線Oに沿って延びる減速部出力軸28と、減速部出力軸28と結合し、曲線板26a,26bの自転運動を取り出す内側係合部材としての内ピン31と、一対の曲線板26a,26b間の隙間に取り付けられてこれら曲線板26a,26bの端面に当接して曲線板の傾きを防止するセンターカラー29と、補強部材61とを有する。
The speed reduction part B is a cycloid speed reducer, and is coaxially arranged on one side in the axis O direction of the motor part A, and has a cylindrical speed
減速部入力軸25は、モータ回転軸35の軸線Oに沿って延び、その両端部のうちモータ部Aに近い側にある減速部入力軸25の端部がモータ回転軸35の一端と結合する。モータ部Aから遠い側にある減速部入力軸25の端部は、転がり軸受39を介して、後述する減速部出力軸28の端部に回転自在に支持される。減速部入力軸25の外周には、一対の偏心部25a,25bが軸線Oから偏心して形成される。減速部入力軸25は、偏心部25a,25bよりもモータ部Aに近い側で、転がり軸受38によって回転自在に支持される。
The speed reduction
2個で一対の偏心部25a,25bは、円板形状であり、軸線O方向に離隔して配置され、偏心運動による遠心力で発生する振動を互いに打ち消し合うために、周方向180°位相を変えて設けられている。モータ回転軸35および減速部入力軸25は、モータ部Aの駆動力を減速部Bに伝達するモータ側回転部材を構成する。
The two pairs of
図2を参照して、曲線板26bは円板形状であり、その外周部を波形に形成される。具体的には曲線板26bの外周部は、エピトロコイド等のトロコイド系曲線で構成されて径方向に窪んだ複数の曲線凹部であり、外ピン27と噛合する。また曲線板26bは、一方側端面から他方側端面に貫通する複数の貫通孔30a,30bを有する。貫通孔30aは、曲線板26bの自転軸心Xを中心とする円周上に等間隔に複数個設けられており、内ピン31を受入れる。また、貫通孔30bは、曲線板26bの自転軸心Xに設けられており、曲線板26bの内周になる。曲線板26bは、偏心部25bの外周に相対回転可能に取り付けられる。内ピン31は、針状ころ軸受を含み、内ピン本体31aと、複数の針状ころ31bと、軸受外輪31cを有する。内ピン本体31aは軸受外輪31cを貫通し、針状ころ31bは内ピン本体31aおよび軸受外輪31c間の環状空間に配置される。軸受外輪31cの外周面は、貫通孔31aの孔壁面と転がり接触する。
Referring to FIG. 2,
曲線板26bは、転がり軸受41によって偏心部25bに対して回転自在に支持されている。理解を容易にするため図2では転がり軸受41の周方向一部を破断して示す。この転がり軸受41は、外径面に内側軌道面42aを有する環状の内輪部材42と、内側軌道面42aと外側軌道面になる貫通孔30bの孔壁面との間に配置される複数のころ44と、周方向で隣り合うころ44の間隔を保持する保持器(図示省略)とを備える円筒ころ軸受である。あるいは深溝玉軸受であってもよい。内輪部材42の内径面は偏心部25bの外径面に嵌合する。内輪部材42は内側軌道面42aに位置し径方向に貫通する孔43および内側軌道面42aを挟んで向かい合う一対の鍔部をさらに有する。孔43は、偏心部25b内部を軸線O直角方向に延びる分岐油路58bと接続する。曲線板26aについても同様である。
The
外ピン27は、モータ側回転部材の軸線Oを中心とする円周軌道上に等間隔に複数設けられ(図2参照)、軸線Oと平行に延びる。そして、2個で一対の曲線板26a,26bが軸線Oを中心として公転運動すると、曲線板26a,26b外周の曲線凹部と外ピン27とが係合して、曲線板26a,26bに自転運動を生じさせる。
A plurality of
なお、減速部ケーシング22b内部に配設された外ピン27は、減速部ケーシング22bの内壁面に直接連結固定されていてもよいが、好ましくは減速部ケーシング22bの内壁面に取付固定されている外ピン保持部45に保持されている。より具体的には、図3に示すように、外ピン27の軸線方向両端部を外ピン保持部45に取り付けられた針状ころ軸受27a(転がり軸受)によって回転自在に支持されている。このように、外ピン27を転がり軸受を介して外ピン保持部45に転がり回転自在に取り付けることにより、曲線板26a,26bとの係合による接触抵抗を低減することができる。詳しくは後述するが外ピン保持部45の他、減速部出力軸28、補強部材61、およびケーシング22を、ケーシング側部材と総称する場合がある。
The
上述した全ての実施形態では減速部ケーシング22bに取付固定される円筒形状の外ピン保持部45が減速部ケーシング22bの内壁面から離隔して設けられているが、これに限定されない。図示はしなかったが、変形例として外ピン保持部45の外壁面が減速部ケーシング22bの内壁面に密着してもよい。あるいは図示はしなかったが、外ピン保持部45は減速部ケーシング22bに一体形成されていてもよい。
In all the embodiments described above, the cylindrical outer
図3を参照して、外ピン保持部45は円筒形状であり、外ピン保持部45の軸方向中央部45cが両端側の軸方向端部45a,45bよりも大径にされる。そして小径の軸方向端部45a,45bと大径の軸方向中央部45cとの間の環状空間に、外ピン27が配置される。また外ピン保持部45は、軸方向端部45a,45bよりも内径側に曲線板26a,26b、減速部出力軸28の端部、内ピン31、偏心部25a,25b、減速部入力軸25の端部を収容する。減速部ケーシング22bからみて外ピン保持部45はフローティング状態にされ、外ピン保持部45の外周面は減速部ケーシング22bの内壁面から離隔する。ただし外ピン保持部45は、ボルトあるいはキーといった固定手段によって減速部ケーシング22bに相対回転不能に取付固定される。このように外ピン保持部45は、非回転の固定部材であり、減速部出力軸28からみて減速部ケーシング22b側にあるケーシング側部材である。インホイールモータ駆動装置21の軽量化の観点から、減速部ケーシング22bを含めて、ケーシング22はアルミ合金やマグネシウム合金等の軽金属で形成する。一方、高い強度が求められる外ピン保持部45は、炭素鋼で形成するのが望ましい。2枚の曲線板26a,26b間には環状のセンターカラー29が配置される。センターカラー29は曲線板26a,26bが軸線Oに対して傾くことを防止する。
Referring to FIG. 3, outer
減速部出力軸28は、モータ部A側の端部に大径フランジ部28bを、車輪ハブ軸受部C側に軸部28dを有する。大径フランジ部28bと軸部28dとの接続箇所には小径フランジ部28cが形成される。大径フランジ部28bの中心には減速部入力軸25の一端を受け入れる円形凹部34が形成され、円形凹部34の内周面に転がり軸受39が配置される。
The speed reduction
大径フランジ部28bの外縁部には、減速部出力軸28の軸線Oを中心とする円周上の等間隔に内ピン31の一端部を固定する穴が形成されている。軸部28dの外周面には、車輪ハブ軸受部Cの車輪ハブ32が連結固定されている(図1参照)。
In the outer edge portion of the large
図3に示すように、大径フランジ部28bから離れた側にある内ピン31の他端部には、補強部材61が設けられている。補強部材61は、減速部B内部で複数の内ピン31先端と結合固定するフランジ形状の大径円板部61bと、大径円板部61bに隣接して同軸に形成され、大径円板部61bよりも小径の小径円板部61cと、小径円板部61cの内周縁からモータ部Aへ延びるさらに小径の円筒部61dとを含む。円筒部61dは軸線Oに沿って延びる形状であるのに対し、大径円板部61bおよび小径円板部61cは、互いに一体形成されて軸線O直角方向に広がる円板部である。
As shown in FIG. 3, a reinforcing member 61 is provided at the other end of the
2枚の曲線板26a、26bから一部の内ピン31に負荷される荷重は補強部材61の大径円板部61bおよび減速部出力軸28の大径フランジ部28bを介して全ての内ピン31によって支持されるため、内ピン31に作用する応力を低減させ耐久性を向上させることができる。円筒部61dの先端は、オイルポンプ51に差し込まれて、オイルポンプ51を駆動する(図1参照)。小径円板部61cの内周面には転がり軸受38が配置され、転がり軸受38は減速部入力軸25を回転自在に支持する。
The load applied to a part of the
補強部材61は、内ピン31を介して減速部出力軸28と連結することから、減速部出力軸28と一体に回転する。減速部出力軸28、補強部材61、および車輪ハブ32は、図1に示すように、減速部Bの駆動力を駆動輪(ボルト32cと連結する図示しない駆動輪)に伝達する車輪側回転部材を構成する。
Since the reinforcing member 61 is connected to the speed reducing
モータ回転軸35とセレーション嵌合する減速部入力軸25の端部を除き、減速部入力軸25の大部分は、環状の補強部材61から減速部出力軸28の小径フランジ部28cまでの軸線方向位置と一致する。そして減速部入力軸25は、補強部材61の内部および円形凹部34に配置されて、一方端側で転がり軸受39を介して減速部出力軸28に回転自在に支持され、他方端側で転がり軸受38を介して補強部材61に回転自在に支持される。
Except for the end of the speed
外ピン保持部45の両端部には金属製の転がり軸受62,64が配置される。転がり軸受62,64は車輪側回転部材を回転自在に支持する。転がり軸受62はモータ部Aに近い側に配置され、転がり軸受64は車輪ハブ軸受部Cに近い側に配置される。
図3に示すように、転がり軸受62の外輪62aは外ピン保持部45における軸方向端部45aの内周面に相対回転不能に取り付けられ、転がり軸受62の内輪62bは補強部材61の小径円板部61cの外周面に相対回転不能に取り付けられる。複数の転動体62cは外輪62aおよび内輪62b間の環状空間に配置される。複数の転動体62cは図示しない保持器によって円周方向等間隔に保持されている。大径円板部61bの外周面および小径円板部61cの外周面は環状段差を構成する。そして転がり軸受62は、これら大径円板部61bと小径円板部61cの環状段差に収納され、内ピン31と同じ径方向位置に配置される。外輪62aおよび外ピン保持部45間には緩衝部材63が介在する。緩衝部材63は外輪62aの外周面に沿って設けられる環状体である。本実施形態では2個の緩衝部材63が軸線O方向に間隔を空けて設けられる。
As shown in FIG. 3, the
転がり軸受64の外輪64aは外ピン保持部45における軸方向端部45bの内周面に相対回転不能に取り付けられ、転がり軸受64の内輪64bは減速部出力軸28の小径フランジ部28cの外周面に相対回転不能に取り付けられる。複数の転動体64cは、外輪64aおよび内輪64b間の環状空間に配置される。複数の転動体62cは図示しない保持器によって円周方向等間隔に保持されている。大径フランジ部28bの外周面および小径フランジ部28cの外周面は環状段差を構成する。そして転がり軸受64は、これら大径フランジ部28bと小径フランジ部28cの環状段差に収納され、内ピン31と同じ径方向位置に配置される。外輪64aおよび外ピン保持部45間には緩衝部材65が介在する。2個の緩衝部材65は外輪64aの外周面に沿って設けられる環状体である。
The
転がり軸受62,64は同様の構成を有し、緩衝部材63,65は同様の構成を有するので、緩衝部材63,65を代表して緩衝部材63を説明する。図4は緩衝部材63を取付けた転がり軸受62を取り出して示す縦断面図である。外輪62aの外周面には環状溝62dが複数本形成される。かかる環状溝62dには、樹脂バンドになる環状の緩衝部材63が嵌合する。外輪62aが相手材(軸方向端部45a)から取り外された状態で、緩衝部材63は軸方向端部45aから圧縮力を受けることなく、環状溝62dから盛り上がっている。これに対し外輪62aを軸方向端部45aに取り付けると、緩衝部材63は軸方向端部45aの内周面から圧縮力を受けて弾性変形し、環状溝62dの内部に収まる。
Since the rolling
なお図3を参照して、外ピン保持部45における軸方向端部45aの内周面には環状溝が形成されず、円筒面のままである。あるいは図示はしなかったが、変形例として軸方向端部45aの内周面に環状溝を設け、外輪62aの外周面を円筒面にしてもよい。
Referring to FIG. 3, an annular groove is not formed on the inner peripheral surface of the
軸方向に計測される緩衝部材63の幅寸法は、荷重を掛けない自然状態で、1.0〜5.0[mm]に含まれる所定値であり、全周に亘り一定である。幅寸法が1.0[mm]よりも小さいと緩衝部材63の成形性が悪化する。幅寸法が5.0[mm]よりも大きいと環状溝62dの加工量が大きくなる。
The width dimension of the
径方向に計測される緩衝部材63の厚み寸法は、荷重を掛けない自然状態で、1.0〜3.0[mm]に含まれる所定値であり、全周に亘り一定である。厚み寸法が1.0[mm]よりも小さいと緩衝部材63の成形性が悪化する。厚み寸法が3.0[mm]よりも大きいと環状溝62dの加工量が大きくなる。
The thickness dimension of the
緩衝部材63が圧縮力を受けると緩衝部材63の振動減衰効果が低下してしまう。そこで緩衝部材63の幅寸法および径寸法は、インホイールモータ駆動装置21の使用温度全域に亘り、外輪62aから緩衝部材63に作用する面圧が所定値以下になるよう算出される。さらに緩衝部材63の幅寸法および厚み寸法は、外輪62aと、外輪62aの取り付け先になる相手部材との嵌め合い状態および熱膨張差を考慮して決定される。外輪62aの相手部材は外ピン保持部45である。例えば外輪62aおよび外ピン保持部45が鋼製の場合、両者の熱膨張差が小さい。このため緩衝部材63は高温時に過大な圧縮力を受けて押し潰されてしまうことがないし、振動減衰効果が低下することもない。
When the
ところが例えば外輪62aが鋼製で外ピン保持部45がアルミニウム等の軽金属製の場合、両者の熱膨張差が大きいため、両者の熱膨張差を考慮しないと高温時に緩衝部材63と外ピン保持部45の締め代が低下してしまう。したがって両者の熱膨張差が大きい場合には、高温時に締め代が変化しないように熱膨張差を考慮して緩衝部材63の幅寸法および厚み寸法を算出する。
However, for example, when the
緩衝部材63,65はフッ素系高分子材料またはアクリル系高分子材料を主成分とする弾性体である。具体的には例えばフッ素ゴム、フロオロシリコーンゴム、アクリルゴム等からなり、他のゴム材料と比較して、耐油性、耐熱性に優れ、振動に関する減衰率が大きい。これに対しモータ側回転部材、車輪側回転部材、およびケーシング側部材は金属製である。また転がり軸受36,37,38,39,62,64も金属製である。
The
図1を参照して、オイルポンプ51は、ポンプケーシング22pの壁内部に設けられた吸入油路52および吐出油路54と接続し、減速部Bの下部に設けられたオイルタンク53から吸入油路52を経て潤滑油を吸い込み、吐出油路54から潤滑油を吐き出す。吐出油路54は、モータ部Aに設けられて潤滑油を冷却する冷却油路55(モータケーシング22aの壁内部)と、モータカバー22tの壁内部に設けられた連絡油路56と、管状のモータ回転軸35および減速部入力軸25の内部に設けられて軸線Oに沿って延びる軸線油路57と、減速部Bで、軸線Oから偏心部25a内を径方向外側に向かって延びる分岐油路58aおよび偏心部25b内を同様に延びる分岐油路58bと、偏心部25a,25bの外周にそれぞれ嵌合する内輪部材42に穿設された孔43(図2参照)および軸線油路57の先端に開口する油路58cと順次接続する。
Referring to FIG. 1, an
そしてオイルポンプ51から吐出した潤滑油は、これら油路54,55,56,57,58a(58b)、58cおよび孔43を順次流れて、減速部B内部(転がり軸受38,39,41,62,64、曲線板26a,26b、内ピン31、および外ピン27等)を潤滑する。潤滑後の潤滑油は落下してオイルタンク53に集まる。そしてオイルポンプ51によって再び吸入されて、インホイールモータ駆動装置21の内部を循環する。このように本実施形態のインホイールモータ駆動装置21は、軸心給油方式の潤滑油回路を備え、減速部入力軸25から潤滑油を噴射する。そして潤滑油は、減速部入力軸25から径方向外側に流れて減速部Bを潤滑する。また潤滑油は、軸線油路57から分岐して、ロータ24に形成されたロータ油路59を流れ、モータ部A内部を冷却するとともに、転がり軸受36,37を潤滑する。
The lubricating oil discharged from the
車輪ハブ軸受部Cは、内輪33c、回転軸としての車輪ハブ32、転動体33、外輪部材33aを有する転がり軸受である。車輪ハブ32は図1に示すように減速部出力軸28の軸線O方向一方側に同軸配置され、減速部出力軸28に連結固定される。外輪部材33aは減速部ケーシング22bの一端にボルト33bで固定され、内輪33cは車輪ハブ32の外周面に嵌合固定される。車輪ハブ軸受部Cは多数の転動体33を複列に有する複列アンギュラ玉軸受であって、第1列の転動体33が減速部Bに近い側で、外輪部材33aおよび内輪33c間に配置され、第2列の転動体33が減速部Bから遠い側で、外輪部材33aおよび車輪ハブ32間に配置される。
The wheel hub bearing portion C is a rolling bearing having an
車輪ハブ32は、円筒形状の中空部32aと、中空部32aの一端から外径方向に突出する車輪取付けフランジ部32bとを有する。中空部32aの中央孔には軸部28dが嵌合する。また中空部32aの外周面には第2列の転動体33と転がり接触する内側軌道面が形成される。車輪取付けフランジ部32bにはボルト32cによって図示しない駆動輪のロードホイールが連結固定される。
The
上記構成のインホイールモータ駆動装置21の作動原理を詳しく説明する。
The operation principle of the in-wheel
モータ部Aは、例えば、ステータ23のコイルに交流電流を供給することによって生じる電磁力を受けて、永久磁石または磁性体によって構成されるロータ24が回転する。
The motor unit A receives, for example, an electromagnetic force generated by supplying an alternating current to the coil of the
これにより、ロータ24に接続されたモータ回転軸35が回転すると、曲線板26a,26bはモータ側回転部材の軸線Oを中心として公転運動する。このとき、外ピン27が、曲線板26a,26bの外周に形成された曲線凹部と転がりながら接触しつつ係合して、曲線板26a,26bをモータ側回転部材の回転とは逆向きに自転運動させる。
Thereby, when the
各貫通孔30aに挿通される内ピン31は、貫通孔30aの内径よりも十分に細く、曲線板26a,26bの自転運動に伴って貫通孔30aの孔壁面と当接する(図2参照)。これにより、曲線板26a,26bの公転運動が内ピン31に伝わらず、曲線板26a,26bの自転運動のみが減速部出力軸28を介して車輪ハブ軸受部Cに伝達される。なお内ピン31の軸受外輪31cは、貫通孔30aの孔壁面に沿って転がる。このとき、軸受外輪31cの一部が貫通孔30aの孔壁面と接触しつつ軸受外輪31cの残部が貫通孔30aの孔壁面と非接触となる。そして軸受外輪31cは、貫通孔30aの孔壁面と接触状態と非接触状態を繰り返しながら転がり接触する。
The
このとき、軸線Oと同軸に配置された減速部出力軸28は、減速部Bの出力軸として曲線板26a,26bの自転を取り出す。これにより、減速部入力軸25の回転が減速部Bによって減速されて減速部出力軸28に伝達されるので、低トルク、高回転型のモータ部Aを採用した場合でも、駆動輪に必要なトルクを伝達することが可能となる。
At this time, the speed reduction
なお、上記構成の減速部Bの減速比は、外ピン27の数をZA、曲線板26a,26bの波形の数をZBとすると、(ZA−ZB)/ZBで算出される。図2に示す実施形態では、ZA=12、ZB=11であるので、減速比は1/11と、非常に大きな減速比を得ることができる。このように、多段構成とすることなく大きな減速比を得ることができる減速部Bを採用することにより、コンパクトで高減速比のインホイールモータ駆動装置21を得ることができる。本実施形態に係るインホイールモータ駆動装置21を電気自動車に採用することにより、バネ下重量を抑えることができる。その結果、走行安定性に優れた電気自動車を得ることができる。
Note that the reduction ratio of the speed reduction unit B having the above-described configuration is calculated as (Z A −Z B ) / Z B where Z A is the number of
また、本実施形態においては、減速部Bの曲線板26a,26bを180°位相を変えて2枚設けたが、この曲線板の枚数は任意に設定することができ、例えば、曲線板を3枚設ける場合は、120°位相を変えて設けるとよい。そして本実施形態のセンターカラー29を2枚準備しておき、隣り合う曲線板間にそれぞれ設けるとよい。
In the present embodiment, two
また、本実施形態における運動変換機構は、減速部出力軸28に固定された内ピン31と、曲線板26a,26bに設けられた貫通孔30aとで構成される例を示したが、これに限ることなく、減速部Bの回転を車輪ハブ32に伝達可能な任意の構成とすることができる。例えば、曲線板に固定された内ピンと、車輪側回転部材に形成された穴とで構成される運動変換機構であってもよい。
Moreover, although the motion conversion mechanism in this embodiment showed the example comprised by the
なお、本実施形態における作動の説明は、各部材の回転に着目して行ったが、実際にはトルクを含む動力がモータ部Aから駆動輪に伝達される。したがって、上述のように減速された動力は高トルクに変換されたものとなっている。 The description of the operation in the present embodiment has been made by paying attention to the rotation of each member. However, in reality, power including torque is transmitted from the motor unit A to the drive wheels. Therefore, the power decelerated as described above is converted into high torque.
また、本実施例における作動の説明では、モータ部Aに電力を供給してモータ部Aを駆動させ、モータ部Aからの動力を駆動輪に伝達させたが、これとは逆に、車両が減速したり坂を下ったりするようなときは、駆動輪側からの動力を減速部Bで高回転低トルクの回転に変換してモータ部Aに伝達し、モータ部Aで発電しても良い。さらに、ここで発電した電力は、バッテリーに蓄電しておき、後でモータ部Aを駆動させてもよいし、車両に備えられた他の電動機器等の作動に用いてもよい。 In the description of the operation in the present embodiment, power is supplied to the motor unit A to drive the motor unit A, and the power from the motor unit A is transmitted to the drive wheels. When decelerating or going down a hill, the power from the driving wheel side may be converted into high-rotation and low-torque rotation by the deceleration unit B and transmitted to the motor unit A, and the motor unit A may generate power. . Furthermore, the electric power generated here may be stored in a battery, and the motor unit A may be driven later, or may be used for the operation of other electric devices provided in the vehicle.
ところで本実施形態のインホイールモータ駆動装置21によれば、モータ側回転部材に含まれるモータ回転軸35を駆動するモータ部Aと、モータ側回転部材の回転を減速して車輪側回転部材に含まれる減速部出力軸28に出力する減速部Bとを備え、減速部出力軸28をケーシング側部材に含まれる外ピン保持部45に回転自在に支持する転がり軸受64は、外輪64aおよび複数の転動体64cを含む転がり軸受である。また車輪側回転部材に含まれる補強部材61を外ピン保持部45に回転自在に支持する転がり軸受62は、外輪62aおよび複数の転動体62cを含む転がり軸受である。そして外輪62a,64aと外ピン保持部45との間には、高分子材料からなる緩衝部材63,65が介在する。
By the way, according to the in-wheel
高分子材料からなる緩衝部材63,65は、金属製部材よりも振動に関する減衰率が大きく、モータ側回転部材に含まれる減速部入力軸25の振動が転がり軸受62,64に伝達しても、緩衝部材63,65で遮断および吸収され、外ピン保持部45や減速部ケーシング22bまで振動が伝達し難くなる。したがって図7に示す従来のインホイールモータ駆動装置と比較して、ケーシング22の振動が低減される。
The
これにより減速部入力軸25の振動が減速部出力軸28を経由して転がり軸受62,64に入力されても、この振動が外ピン保持部45に伝達することを抑制することができる。したがって外ピン保持部45およびケーシング22の振動を低減することができる。
Thereby, even if the vibration of the speed reduction
図3に示す本実施形態のインホイールモータ駆動装置21によれば、緩衝部材63,65は外輪62a,64aの外周面に沿って延びる環状体である。このように転がり軸受62,64の全周に亘り緩衝部材を設けることから、減速部B内部の振動を効果的に減衰させることができる。
According to the in-wheel
また本実施形態の緩衝部材63,65は、フッ素系高分子材料またはアクリル系高分子材料を主成分とする弾性体である。このように樹脂バンドを用いることにより、耐油性および耐熱性を確保することができる。
The
また本実施形態の減速部Bは、モータ側回転部材に偏心して設けられた偏心部25a,25bと、偏心部25a,25bに相対回転可能に保持されてモータ側回転部材の回転に伴って該モータ側回転部材の軸線Oを中心とする公転運動を行う公転部材としての曲線板26a,26bと、曲線板26a,26bの外周に係合して曲線板26a,26bの自転運動を生じさせる外周係合部材としての外ピン27と、曲線板26a,26bの自転運動をモータ側回転部材の軸線Oを中心とする回転運動に変換して車輪側回転部材へ出力する運動変換機構としての内ピン31および貫通孔30aを有する。減速部Bがこのようなサイクロイド減速機である場合も、減速部内部の振動を抑制することができる。
In addition, the speed reduction part B of the present embodiment is held eccentrically by the
なお図示はしなかったが、図3および図4に示す実施形態の変形例として、外輪62a,64aの外周面に緩衝部材63,65を設けるのではなく、内輪62b,64bの内周面に緩衝部材63,65を設け、内輪62b,64bの内周面と車輪側回転部材の外周面との間に緩衝部材を介在させてもよい。あるいは外輪62a,64aの外周面と内輪62b,64bの内周面の双方に緩衝部材を設けてもよい。
Although not shown in the drawings, as a modification of the embodiment shown in FIGS. 3 and 4, the
次に本発明の他の実施形態を説明する。図5は他の実施形態を示す縦断面図であり、インホイールモータ駆動装置の減速部を拡大して示す。他の実施形態につき、前述した実施形態と共通する構成については同一の符号を付して説明を省略し、異なる構成について以下に説明する。他の実施形態では減速部入力軸25を回転支持する転がり軸受38,39に高分子材料からなる緩衝部材63,65を設ける。
Next, another embodiment of the present invention will be described. FIG. 5 is a longitudinal sectional view showing another embodiment, and shows an enlarged view of a speed reduction portion of an in-wheel motor drive device. Regarding the other embodiments, the same reference numerals are given to the configurations common to the above-described embodiments, and the description thereof will be omitted, and different configurations will be described below. In another embodiment,
減速部入力軸25からみてケーシング側部材になる減速部出力軸28および補強部材61は、転がり軸受38,39を介して減速部入力軸25を回転自在に支持する。軸受38は外輪38a、内輪38b、複数の転動体38c、および図示しない保持器を有する転がり軸受である。転がり軸受39も同様である。内輪38bと、内輪38bを貫通する減速部入力軸25との間には、高分子材料からなる緩衝部材63が介在する。緩衝部材63は環状の樹脂バンドであり、軸線O方向に間隔を空けて2箇所配置される。また内輪39bと、内輪39bを貫通する減速部入力軸25との間には、高分子材料からなる緩衝部材65が介在する。緩衝部材65は環状の樹脂バンドであり、軸線O方向に間隔を空けて2箇所配置される。図5に示す緩衝部材63,65の固定は、内輪38b,39bの内周面に環状溝を形成し、かかる環状溝に環状体の緩衝部材63,65を嵌合するとよい。緩衝部材63,65の材料、幅寸法および厚み寸法は、前述した実施形態の転がり軸受62、64の緩衝部材63、65と同じであり、また同様に転がり軸受38、39の内輪38b、39bと、これら内輪38b、39bが取り付けられる相手部材になる減速部入力軸25との嵌め合い状態および熱膨張差を考慮して決定される。
The speed
他の実施形態によれば図5に示すように、モータ側回転部材に含まれる減速部入力軸25をケーシング側部材に含まれる減速部出力軸28に回転自在に支持する転がり軸受39は、内輪39bおよび複数の転動体39cを含む転がり軸受である。また減速部入力軸25をケーシング側部材に含まれる補強部材61に回転自在に支持する転がり軸受38は、内輪38bおよび複数の転動体38cを含む転がり軸受である。そして内輪38bと、内輪38bを貫通する減速部入力軸25との間には、高分子材料からなる緩衝部材63が介在し、内輪39bと、内輪38bを貫通する減速部入力軸25との間には、高分子材料からなる緩衝部材65が介在する。これにより減速部入力軸25の振動が転がり軸受38,39に入力されても、この振動が減速部出力軸28および補強部材61に伝達することを抑制することができる。したがって減速部入力軸25よりもケーシング側になるケーシング22の振動を低減することができる。
According to another embodiment, as shown in FIG. 5, the rolling
また他の実施形態によれば、図5に示すようにモータ側回転部材に含まれる減速部入力軸25が車輪側回転部材に含まれる減速部出力軸28に同軸配置され、減速部出力軸28の端部には減速部入力軸25の端部を受け入れる円形凹部34が形成される。減速部入力軸25をケーシング側部材に相当する減速部出力軸28に回転自在に支持する転がり軸受39は、円形凹部34の内周面と減速部入力軸25の外周面の間に画成される環状空間に設置され、緩衝部材65を伴う。これにより、ケーシング側部材が減速部出力軸28のように回転する部材であっても、減速部Bの内部からケーシング側部材へ振動が伝達することを抑制することができる。
According to another embodiment, as shown in FIG. 5, the speed reduction
なお図示はしなかったが、図5に示す実施形態の変形例として、内輪38b,39bの内周面に緩衝部材63,65を設けるのではなく、外輪38a,39aの外周面に緩衝部材63,65を設け、外輪38a,39aの外周面と車輪側回転部材の内周面との間に緩衝部材を介在させてもよい。あるいは外輪38a,39aの外周面と内輪38b,39bの内周面の双方に緩衝部材を設けてもよい。
Although not shown, as a modification of the embodiment shown in FIG. 5, the
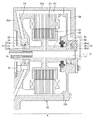
次に本発明のさらに他の実施形態を説明する。図6はさらに他の実施形態を示す縦断面図である。さらに他の実施形態につき、前述した実施形態と共通する構成については同一の符号を付して説明を省略し、異なる構成について以下に説明する。さらに他の実施形態ではモータ回転軸35を回転支持する転がり軸受36,37に高分子材料からなる緩衝部材63,65を設ける。
Next, still another embodiment of the present invention will be described. FIG. 6 is a longitudinal sectional view showing still another embodiment. Further, regarding the other embodiments, the same reference numerals are given to configurations common to the above-described embodiments, description thereof is omitted, and different configurations will be described below. In yet another embodiment, the rolling
転がり軸受36は、外輪36a、内輪36b、複数の転動体36c、および図示しない保持器を有し、外輪36aの外周面がモータカバー22tの中心孔の内周面に取り付けられる。外輪36aとケーシング側部材に含まれるモータカバー22tとの間には、高分子材料からなる緩衝部材63が介在する。緩衝部材63は環状の樹脂バンドであり、軸線O方向に間隔を空けて2箇所配置される。
The rolling
転がり軸受37は、外輪37a、内輪37b、複数の転動体37c、および図示しない保持器を有し、外輪37aの外周面がポンプケーシング22pの中心孔の内周面に取り付けられる。外輪37aとケーシング側部材に含まれるポンプケーシング22pとの間には、高分子材料からなる緩衝部材65が介在する。緩衝部材65は環状の樹脂バンドであり、軸線O方向に間隔を空けて2箇所配置される。
The rolling
緩衝部材63,65の固定は、前述した図4に示すように、外輪36a,37aの外周面に環状溝を設けるとよい。緩衝部材63,65の幅寸法および厚み寸法は、前述したように転がり軸受36、37の外輪36a、37aと、これら外輪36a、37aの相手部材になるケーシング22との嵌め合い状態および熱膨張差を考慮して決定される。
As shown in FIG. 4 described above, the
さらに他の実施形態によれば図6に示すように、モータ側回転部材に含まれるモータ回転軸35をケーシング22に回転自在に支持する転がり軸受36,37は、外輪36a,37aおよび複数の転動体36c,37cを含む転がり軸受であり、外輪36a,37aとケーシング22との間には、高分子材料からなる緩衝部材63,65が介在する。これによりモータ回転軸35の振動が転がり軸受36,37に入力されても、この振動がケーシング22に伝達することを抑制することができる。したがってケーシング22の振動を低減することができる。
According to still another embodiment, as shown in FIG. 6, the rolling
またモータ側回転部材は、モータ部Aの一部でありモータ部Aから回転を出力するモータ回転軸35と、減速部Bの一部であり減速部Bに回転を入力する減速部入力軸25とを含み、ケーシング側部材はモータ部Aの一部であるポンプケーシング22pおよびモータカバー22tを含み、緩衝部材63,65は、モータ回転軸35をポンプケーシング22pおよびモータカバー22tに回転自在に支持する転がり軸受36,37に設けられる。
これにより、モータ回転軸35の振動が転がり軸受36,37に入力されても、この振動がモータカバー22tおよびポンプケーシング22pに伝達することを抑制することができる。
The motor-side rotating member is a part of the motor unit A and outputs a
Thereby, even if the vibration of the
なお図示はしなかったが、図6に示す実施形態の変形例として、外輪36a,37aの外周面に緩衝部材63,65を設けるのではなく、内輪36b,37bの内周面に緩衝部材63,65を設け、内輪36b,37bの内周面とモータ回転軸35の外周面との間に緩衝部材を介在させてもよい。あるいは外輪36a,37aの外周面と内輪36b,37bの内周面の双方に緩衝部材を設けてもよい。
Although not shown, as a modification of the embodiment shown in FIG. 6, the
以上、図面を参照してこの発明の実施の形態を説明したが、この発明は、図示した実施の形態のものに限定されない。図示した実施の形態に対して、この発明と同一の範囲内において、あるいは均等の範囲内において、種々の修正や変形を加えることが可能である。例えば上述した図3、図5、および図6の実施形態や、各実施形態の説明で附言した変形例の中から幾つかを選んで組み合わせてもよい。 Although the embodiments of the present invention have been described with reference to the drawings, the present invention is not limited to the illustrated embodiments. Various modifications and variations can be made to the illustrated embodiment within the same range or equivalent range as the present invention. For example, you may select and combine some from the embodiment of FIG.3, FIG.5 and FIG.6 mentioned above, and the modification added by description of each embodiment.
この発明になるインホイールモータ駆動装置は、電気自動車およびハイブリッド車両において有利に利用される。 The in-wheel motor drive device according to the present invention is advantageously used in electric vehicles and hybrid vehicles.
21 インホイールモータ駆動装置、 22 ケーシング、
22a モータケーシング、 22b 減速部ケーシング、
22p ポンプケーシング、 22t モータカバー、 23 ステータ、
24ロータ、 25 減速部入力軸、 25a,25b 偏心部、
26a,26b 曲線板、 27 外ピン、 28 減速部出力軸、
28b 大径フランジ部、 28c 小径フランジ部、 28d 軸部、 31 内ピン、 32 車輪ハブ、 33 車輪ハブ軸受、
34 円形凹部、 35 モータ回転軸、
36,37,38,39 転がり軸受、 36a,37a,38a,39a 外輪、
36b,37b,38b,39b 内輪、
36c,36c,37c,38c,39c 転動体、 45 外ピン保持部
61 補強部材、 61b 大径円板部、 61c 小径円板部、
61d 円筒部、 62,64 転がり軸受、 62b,64b 内輪
62a,64a 外輪 62c,64c 転動体 62d 環状溝、
63,65 緩衝部材、 A モータ部、 B 減速部、
C 車輪ハブ軸受部、 O 軸線、 X 自転軸心。
21 in-wheel motor drive device, 22 casing,
22a motor casing, 22b reduction gear casing,
22p pump casing, 22t motor cover, 23 stator,
24 rotor, 25 reduction part input shaft, 25a, 25b eccentric part,
26a, 26b Curved plate, 27 Outer pin, 28 Speed reducer output shaft,
28b Large diameter flange portion, 28c Small diameter flange portion, 28d Shaft portion, 31 Inner pin, 32 Wheel hub, 33 Wheel hub bearing,
34 circular recess, 35 motor rotating shaft,
36, 37, 38, 39 Rolling bearing, 36a, 37a, 38a, 39a Outer ring,
36b, 37b, 38b, 39b Inner ring,
36c, 36c, 37c, 38c, 39c rolling elements, 45 outer pin holding part
61 reinforcing member, 61b large-diameter disk part, 61c small-diameter disk part,
61d Cylindrical part, 62, 64 Rolling bearing, 62b, 64b Inner ring
62a, 64a
63, 65 Buffer member, A motor part, B deceleration part,
C Wheel hub bearing, O axis, X Spindle shaft center.
Claims (7)
前記モータ側回転部材をケーシング側部材に回転自在に支持する軸受、および/または前記車輪側回転部材をケーシング側部材に回転自在に支持する軸受は、外輪および複数の転動体を含む転がり軸受であり、
前記外輪と前記ケーシング側部材との間には、高分子材料からなる緩衝部材が介在することを特徴とする、インホイールモータ駆動装置。 A motor unit that drives the motor-side rotating member; and a speed-reducing unit that decelerates the rotation of the motor-side rotating member and outputs it to the wheel-side rotating member.
The bearing that rotatably supports the motor-side rotating member on the casing-side member and / or the bearing that rotatably supports the wheel-side rotating member on the casing-side member is a rolling bearing including an outer ring and a plurality of rolling elements. ,
An in-wheel motor drive device, wherein a buffer member made of a polymer material is interposed between the outer ring and the casing side member.
前記モータ側回転部材をケーシング側部材に回転自在に支持する軸受、および/または前記車輪側回転部材をケーシング側部材に回転自在に支持する軸受は、内輪および複数の転動体を含む転がり軸受であり、
前記内輪と、該内輪を貫通する前記モータ側回転部材および/または前記車輪側回転部材との間には、高分子材料からなる緩衝部材が介在することを特徴とする、インホイールモータ駆動装置。 A motor unit that drives the motor-side rotating member; and a speed-reducing unit that decelerates the rotation of the motor-side rotating member and outputs it to the wheel-side rotating member.
The bearing that rotatably supports the motor side rotating member on the casing side member and / or the bearing that rotatably supports the wheel side rotating member on the casing side member is a rolling bearing including an inner ring and a plurality of rolling elements. ,
An in-wheel motor drive device characterized in that a buffer member made of a polymer material is interposed between the inner ring and the motor-side rotating member and / or the wheel-side rotating member penetrating the inner ring.
前記緩衝部材は、前記モータ回転軸を前記ケーシング側部材に回転自在に支持する軸受に設けられる、請求項1または2に記載のインホイールモータ駆動装置。 The motor-side rotating member includes a motor rotating shaft that is a part of the motor unit and outputs rotation from the motor unit, and a speed reducing unit input shaft that is a part of the speed reducing unit and inputs rotation to the speed reducing unit. Including
The in-wheel motor drive device according to claim 1, wherein the buffer member is provided in a bearing that rotatably supports the motor rotation shaft on the casing side member.
前記車輪側回転部材の端部には、前記モータ側回転部材の端部を受け入れる円形凹部が形成され、
前記モータ側回転部材を前記ケーシング側部材に回転自在に支持する軸受は、前記円形凹部の内周面と前記モータ側回転部材の外周面の間に画成される環状空間に設置され、前記緩衝部材を伴う、請求項1〜5のいずれかに記載のインホイールモータ駆動装置。 The motor side rotating member is coaxially arranged with the wheel side rotating member,
A circular recess that receives the end of the motor-side rotating member is formed at the end of the wheel-side rotating member,
A bearing that rotatably supports the motor-side rotating member on the casing-side member is installed in an annular space defined between an inner peripheral surface of the circular recess and an outer peripheral surface of the motor-side rotating member, and the buffer The in-wheel motor drive device in any one of Claims 1-5 with a member.
前記偏心部に相対回転可能に保持され、前記モータ側回転部材の回転に伴って該モータ側回転部材の軸線を中心とする公転運動を行う公転部材と、
前記公転部材の外周に係合して前記公転部材の自転運動を生じさせる外周係合部材と、
前記公転部材の自転運動を前記モータ側回転部材の軸線を中心とする回転運動に変換して前記車輪側回転部材へ出力する運動変換機構とを有する、請求項6に記載のインホイールモータ駆動装置。 The speed reduction part is an eccentric part provided eccentric to the motor side rotation member;
A revolving member that is held in the eccentric part so as to be relatively rotatable, and performs a revolving motion around the axis of the motor side rotating member as the motor side rotating member rotates,
An outer periphery engaging member that engages with the outer periphery of the revolving member to cause the revolving motion of the revolving member;
The in-wheel motor drive device according to claim 6, further comprising: a motion conversion mechanism that converts the rotation motion of the revolution member into a rotation motion centering on an axis of the motor-side rotation member and outputs the rotation motion to the wheel-side rotation member. .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014136463A JP2016014423A (en) | 2014-07-02 | 2014-07-02 | In-wheel motor drive device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014136463A JP2016014423A (en) | 2014-07-02 | 2014-07-02 | In-wheel motor drive device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016014423A true JP2016014423A (en) | 2016-01-28 |
Family
ID=55230769
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014136463A Pending JP2016014423A (en) | 2014-07-02 | 2014-07-02 | In-wheel motor drive device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016014423A (en) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109505925A (en) * | 2017-09-13 | 2019-03-22 | 麦克赛尔控股株式会社 | Speed reducer and the electrical equipment for having speed reducer |
| JP2019131009A (en) * | 2018-01-30 | 2019-08-08 | ミネベアミツミ株式会社 | Wheel module and moving mechanism |
| JP2019131010A (en) * | 2018-01-30 | 2019-08-08 | ミネベアミツミ株式会社 | Wheel module and moving mechanism |
| JP2019131008A (en) * | 2018-01-30 | 2019-08-08 | ミネベアミツミ株式会社 | Wheel module and movement mechanism |
| CN110285198A (en) * | 2019-07-23 | 2019-09-27 | 温州市日康烟具厂 | A kind of cycloid reducer |
| JP2019183990A (en) * | 2018-04-12 | 2019-10-24 | 住友重機械工業株式会社 | Gear device |
| CN111503163A (en) * | 2018-12-28 | 2020-08-07 | 株式会社荏原制作所 | Bearing device and vacuum pump device |
| CN111684175A (en) * | 2018-01-30 | 2020-09-18 | 美蓓亚三美株式会社 | Wheel module and moving mechanism |
| JP2021108631A (en) * | 2020-01-15 | 2021-08-02 | 株式会社シマノ | Fishing reel |
-
2014
- 2014-07-02 JP JP2014136463A patent/JP2016014423A/en active Pending
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109505925A (en) * | 2017-09-13 | 2019-03-22 | 麦克赛尔控股株式会社 | Speed reducer and the electrical equipment for having speed reducer |
| CN111684175A (en) * | 2018-01-30 | 2020-09-18 | 美蓓亚三美株式会社 | Wheel module and moving mechanism |
| JP2019131009A (en) * | 2018-01-30 | 2019-08-08 | ミネベアミツミ株式会社 | Wheel module and moving mechanism |
| JP2019131010A (en) * | 2018-01-30 | 2019-08-08 | ミネベアミツミ株式会社 | Wheel module and moving mechanism |
| JP2019131008A (en) * | 2018-01-30 | 2019-08-08 | ミネベアミツミ株式会社 | Wheel module and movement mechanism |
| CN111684175B (en) * | 2018-01-30 | 2023-10-27 | 美蓓亚三美株式会社 | Wheel module and moving mechanism |
| JP7084151B2 (en) | 2018-01-30 | 2022-06-14 | ミネベアミツミ株式会社 | Wheel module and movement mechanism |
| JP7033995B2 (en) | 2018-04-12 | 2022-03-11 | 住友重機械工業株式会社 | Gear device |
| JP2019183990A (en) * | 2018-04-12 | 2019-10-24 | 住友重機械工業株式会社 | Gear device |
| CN111503163A (en) * | 2018-12-28 | 2020-08-07 | 株式会社荏原制作所 | Bearing device and vacuum pump device |
| CN110285198A (en) * | 2019-07-23 | 2019-09-27 | 温州市日康烟具厂 | A kind of cycloid reducer |
| JP2021108631A (en) * | 2020-01-15 | 2021-08-02 | 株式会社シマノ | Fishing reel |
| JP7281422B2 (en) | 2020-01-15 | 2023-05-25 | 株式会社シマノ | fishing reel |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016014423A (en) | In-wheel motor drive device | |
| JP5709373B2 (en) | In-wheel motor drive device | |
| WO2015104980A1 (en) | In-wheel motor drive device | |
| JP2009052630A (en) | In-wheel motor drive unit | |
| JP2015021570A (en) | In-wheel motor driving device | |
| JP2016161117A (en) | Cycloid speed reducer and motor drive device with cycloid speed reducer | |
| JP2017057901A (en) | Motor drive unit for vehicle | |
| JP2010255713A (en) | In-wheel motor driving device | |
| WO2016017351A1 (en) | Cycloidal speed reducer and in-wheel motor drive device provided with same | |
| JP6324761B2 (en) | In-wheel motor drive device | |
| JP6400297B2 (en) | In-wheel motor drive device | |
| JP2008184017A (en) | In-wheel motor drive device | |
| WO2015133278A1 (en) | In-wheel motor drive device | |
| WO2015046086A1 (en) | In-wheel motor drive device | |
| JP2008261445A (en) | In-wheel motor drive device | |
| WO2015137088A1 (en) | In-wheel motor drive device | |
| JP6328429B2 (en) | In-wheel motor drive device | |
| JP2016125628A (en) | In-wheel motor driving device | |
| JP2008168822A (en) | In-wheel motor drive unit | |
| JP2016023700A (en) | Motor drive unit for vehicle | |
| WO2016043011A1 (en) | In-wheel motor drive device | |
| WO2015137073A1 (en) | In-wheel motor drive device | |
| JP2012097903A (en) | In-wheel motor driving device | |
| WO2016043012A1 (en) | In-wheel motor drive device | |
| JP2009216104A (en) | Railway vehicle drive unit |