JP2015137451A - 可動式桟橋 - Google Patents
可動式桟橋 Download PDFInfo
- Publication number
- JP2015137451A JP2015137451A JP2014007805A JP2014007805A JP2015137451A JP 2015137451 A JP2015137451 A JP 2015137451A JP 2014007805 A JP2014007805 A JP 2014007805A JP 2014007805 A JP2014007805 A JP 2014007805A JP 2015137451 A JP2015137451 A JP 2015137451A
- Authority
- JP
- Japan
- Prior art keywords
- bridge girder
- rotation mechanism
- horizontal
- movable
- divided
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/14—Arrangement of ship-based loading or unloading equipment for cargo or passengers of ramps, gangways or outboard ladders ; Pilot lifts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/30—Arrangement of ship-based loading or unloading equipment for transfer at sea between ships or between ships and off-shore structures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B17/00—Vessels parts, details, or accessories, not otherwise provided for
- B63B2017/0072—Seaway compensators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/14—Arrangement of ship-based loading or unloading equipment for cargo or passengers of ramps, gangways or outboard ladders ; Pilot lifts
- B63B2027/141—Arrangement of ship-based loading or unloading equipment for cargo or passengers of ramps, gangways or outboard ladders ; Pilot lifts telescopically extendable
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Bridges Or Land Bridges (AREA)
Abstract
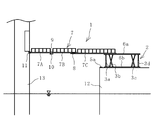
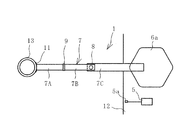
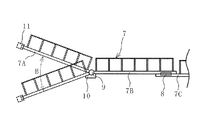
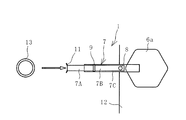
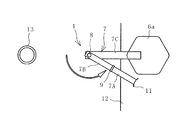
【解決手段】6自由度モーションベース2により支持された天板6aと、天板6aから横方向に延長された橋桁部7とを備えた可動式桟橋1の橋桁部7を複数の分割体7A、7B、7Cを長手方向に接続して構成し、水平回転機構8を介して接続した分割体7B、7Cを水平回転機構8を中心にして水平方向に回動可能にするとともに、上下回転機構9を介して接続した分割体7A、7Bを上下回転機構9を中心にして上下方向に回動可能にした。
【選択図】図1
Description
2 6自由度モーションベース
3a〜3f アクチュエータ
4a〜4f 駆動部
5 制御部
5a センサ
6a 天板
6b 基板
7 橋桁部
7A、7B、7C 分割体
8 水平回転機構
9 上下回転機構
10 規制部材
11 マグネット(接続固定具)
12 船舶
13 接続対象物
Claims (5)
- 6自由度モーションベースにより支持された天板と、この天板の上面から横方向に延長された橋桁部とを備えた可動式桟橋において、
前記橋桁部が複数の分割体を長手方向に接続して構成され、長手方向に隣接する分割体どうしを接続する少なくとも1つの水平回転機構と、長手方向に隣接する分割体どうしを接続する少なくとも1つの上下回転機構とを備え、前記水平回転機構を中心にしてこの水平回転機構を介して接続される分割体を水平方向に回動可能にし、前記上下回転機構を中心にしてこの上下回転機構を介して接続される分割体を上下方向に回動可能にした構成にしたことを特徴とする可動式桟橋。 - 少なくとも1つの分割体を、長手方向に隣接して接続される相手側の分割体に対して長手方向に移動させることにより、前記橋桁部が伸縮する構成にした請求項1に記載の可動式桟橋。
- 前記水平回転機構による分割体の水平回動範囲角度を150°以上にして、前記水平回転機構を中心にして回動可能に互いに接続される一方の分割体を、他方の分割体の近傍位置まで水平方向に回動させて折り畳める構成にした請求項1または2に記載の可動式桟橋。
- 前記上下回転機構による分割体の上下回動範囲角度を90°以下に規制する規制部材を備えた請求項1〜3のいずれかに記載の可動式桟橋。
- 前記橋桁部の先端に、この橋桁部を接続対象物に接続するためのマグネットを備えた請求項1〜4のいずれかに記載の可動式桟橋。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014007805A JP6336280B2 (ja) | 2014-01-20 | 2014-01-20 | 可動式桟橋 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014007805A JP6336280B2 (ja) | 2014-01-20 | 2014-01-20 | 可動式桟橋 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015137451A true JP2015137451A (ja) | 2015-07-30 |
| JP6336280B2 JP6336280B2 (ja) | 2018-06-06 |
Family
ID=53768664
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014007805A Active JP6336280B2 (ja) | 2014-01-20 | 2014-01-20 | 可動式桟橋 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6336280B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017057553A (ja) * | 2015-09-14 | 2017-03-23 | 東亜建設工業株式会社 | 可動式桟橋 |
| JP2018138722A (ja) * | 2017-02-24 | 2018-09-06 | 日本無線株式会社 | 動揺補正装置 |
| CN110565502A (zh) * | 2019-09-16 | 2019-12-13 | 长安大学 | 一种折叠桥梁及其使用方法 |
| NL2027115B1 (en) * | 2020-12-15 | 2022-07-08 | Ampelmann Holding B V | A gangway structure, a vessel and a method |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6022512U (ja) * | 1983-07-18 | 1985-02-16 | 日本鋼管株式会社 | 浮ドツク用桟橋 |
| JPH01125798U (ja) * | 1988-02-22 | 1989-08-28 | ||
| US5586516A (en) * | 1994-09-06 | 1996-12-24 | Services Algoa International Anstalt | Relating to boarding ramps |
| JP2007009423A (ja) * | 2005-06-28 | 2007-01-18 | Ishikawajima Harima Heavy Ind Co Ltd | 旅客乗降設備 |
| US20120137450A1 (en) * | 2009-07-06 | 2012-06-07 | Asbjoern Nes | Construction of a Walkway |
| US20130212812A1 (en) * | 2010-08-13 | 2013-08-22 | Ampelmann Operations B.V. | Vessel, a motion platform, a control system, a method for compensating motions of a vessel and a computer program product |
-
2014
- 2014-01-20 JP JP2014007805A patent/JP6336280B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6022512U (ja) * | 1983-07-18 | 1985-02-16 | 日本鋼管株式会社 | 浮ドツク用桟橋 |
| JPH01125798U (ja) * | 1988-02-22 | 1989-08-28 | ||
| US5586516A (en) * | 1994-09-06 | 1996-12-24 | Services Algoa International Anstalt | Relating to boarding ramps |
| JP2007009423A (ja) * | 2005-06-28 | 2007-01-18 | Ishikawajima Harima Heavy Ind Co Ltd | 旅客乗降設備 |
| US20120137450A1 (en) * | 2009-07-06 | 2012-06-07 | Asbjoern Nes | Construction of a Walkway |
| US20130212812A1 (en) * | 2010-08-13 | 2013-08-22 | Ampelmann Operations B.V. | Vessel, a motion platform, a control system, a method for compensating motions of a vessel and a computer program product |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017057553A (ja) * | 2015-09-14 | 2017-03-23 | 東亜建設工業株式会社 | 可動式桟橋 |
| JP2018138722A (ja) * | 2017-02-24 | 2018-09-06 | 日本無線株式会社 | 動揺補正装置 |
| CN110565502A (zh) * | 2019-09-16 | 2019-12-13 | 长安大学 | 一种折叠桥梁及其使用方法 |
| CN110565502B (zh) * | 2019-09-16 | 2024-04-12 | 长安大学 | 一种折叠桥梁及其使用方法 |
| NL2027115B1 (en) * | 2020-12-15 | 2022-07-08 | Ampelmann Holding B V | A gangway structure, a vessel and a method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6336280B2 (ja) | 2018-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6487798B2 (ja) | 可動式桟橋 | |
| JP6336280B2 (ja) | 可動式桟橋 | |
| CN109311525B (zh) | 用于将人员和设备从第一装置转移到第二装置的通道 | |
| RU2020102261A (ru) | Порождающий движение платформенный модуль | |
| RU2017102916A (ru) | Выравнивающая группа для автовышек | |
| US20130134260A1 (en) | Reduced dimensions platform for the landing of an aircraft on an access facility | |
| WO2013174886A1 (en) | Vessel gangway system | |
| FI4186849T3 (fi) | Menetelmä ja järjestelmä työkoneen puomiston ohjaamiseksi käyttämällä kärkiohjausta | |
| JP2017513763A5 (ja) | ||
| CA2994100A1 (en) | Load control apparatus | |
| JP2019507054A5 (ja) | ||
| JP2017057553A (ja) | 可動式桟橋 | |
| KR101141594B1 (ko) | 평형 유지 크레인 및 이를 장착한 선박 | |
| NL2014726B1 (en) | Cantilever system for an offshore platform. | |
| CN101975028A (zh) | 浮式钻井井架实时调平底座 | |
| CN106089102A (zh) | 海上钻机自调平系统 | |
| KR101205345B1 (ko) | 펜더 장치 및 그 장치를 구비한 선박 | |
| JP2014108865A (ja) | クレーン先端の振動抑制方法および海上作業船 | |
| CN114802587A (zh) | 主动位移补偿式超稳四体船 | |
| JP7433710B2 (ja) | 転落防止機構 | |
| JP5763350B2 (ja) | ロボット用肢体駆動機構、およびこの肢体駆動機構を用いたロボット装置 | |
| KR20240010984A (ko) | 부유식구조물 | |
| CN108137141B (zh) | 具有可移动悬臂的海上系统 | |
| CN105502180A (zh) | 起吊装置及云梯消防车 | |
| NL2006942C2 (en) | A vessel comprising a lifting device. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161108 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180417 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180502 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6336280 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |