JP2015114308A - 触覚センサ - Google Patents
触覚センサ Download PDFInfo
- Publication number
- JP2015114308A JP2015114308A JP2013259114A JP2013259114A JP2015114308A JP 2015114308 A JP2015114308 A JP 2015114308A JP 2013259114 A JP2013259114 A JP 2013259114A JP 2013259114 A JP2013259114 A JP 2013259114A JP 2015114308 A JP2015114308 A JP 2015114308A
- Authority
- JP
- Japan
- Prior art keywords
- row
- column
- electrode layer
- individual
- layer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 420
- 230000005489 elastic deformation Effects 0.000 claims abstract description 84
- 239000011159 matrix material Substances 0.000 claims abstract description 83
- 238000005520 cutting process Methods 0.000 claims description 37
- 230000006870 function Effects 0.000 claims description 35
- 239000000463 material Substances 0.000 claims description 31
- 239000004020 conductor Substances 0.000 claims description 30
- 229920001971 elastomer Polymers 0.000 claims description 23
- 125000006850 spacer group Chemical group 0.000 claims description 19
- 239000002184 metal Substances 0.000 claims description 12
- 229910052751 metal Inorganic materials 0.000 claims description 12
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 claims description 7
- 229910052799 carbon Inorganic materials 0.000 claims description 7
- 230000002093 peripheral effect Effects 0.000 claims description 7
- 238000010030 laminating Methods 0.000 claims description 6
- 230000035807 sensation Effects 0.000 claims description 2
- 230000003247 decreasing effect Effects 0.000 claims 4
- 238000003825 pressing Methods 0.000 abstract description 21
- 238000012986 modification Methods 0.000 description 29
- 230000004048 modification Effects 0.000 description 29
- 238000010586 diagram Methods 0.000 description 13
- 230000007423 decrease Effects 0.000 description 10
- 238000005452 bending Methods 0.000 description 8
- 230000012447 hatching Effects 0.000 description 8
- 239000000758 substrate Substances 0.000 description 6
- 239000004642 Polyimide Substances 0.000 description 5
- 229920001721 polyimide Polymers 0.000 description 5
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 4
- 239000011889 copper foil Substances 0.000 description 4
- 238000003475 lamination Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920002379 silicone rubber Polymers 0.000 description 3
- 239000004945 silicone rubber Substances 0.000 description 3
- 239000004593 Epoxy Substances 0.000 description 2
- 239000000654 additive Substances 0.000 description 2
- 230000000996 additive effect Effects 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 239000011888 foil Substances 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 229920006254 polymer film Polymers 0.000 description 2
- 238000007639 printing Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000009751 slip forming Methods 0.000 description 2
- 239000002759 woven fabric Substances 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 230000008570 general process Effects 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000000474 nursing effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000036544 posture Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000011895 specific detection Methods 0.000 description 1
- 230000002195 synergetic effect Effects 0.000 description 1
Images
















Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
Description
各検出点の位置に配置され、作用した外力に基づいてその電気的特性に変化が生じるm×n個の検出素子と、
行方向に隣接する各検出素子対を相互に接続する行方向接続部と、列方向に隣接する各検出素子対を相互に接続する列方向接続部と、
を有する網状本体部と、
各検出素子に生じた電気的特性の変化に基づいて、当該検出素子が配置されている検出点に作用した外力を検出する検出回路と、
を設け、
行方向接続部および列方向接続部に可撓性をもたせ、行方向もしくは列方向に隣接する任意の検出素子対について、両者の三次元空間上での相互位置関係が、三次元の自由度をもって変化できるように構成したものである。
各検出素子が、上方に配置された上部個別電極層と、この上部個別電極層に対向するように下方に配置された下部個別電極層と、これら一対の個別電極層間に介挿された中間要素と、を有し、
中間要素は、一対の個別電極層間の間隔を縮める方向に外力が作用すると、少なくともその一部が弾性変形を生じ、外力が作用しなくなったときに当該間隔を元に復元させる性質をもち、かつ、当該間隔の変化に応じて一対の個別電極層間の電気抵抗を変化させる性質をもち、
検出回路が、上記電気抵抗に基づいて、作用した外力を検出するようにしたものである。
中間要素が、上部個別電極層の下面から下方に凸となるように隆起した形状をなす個別弾性変形体と、下部個別電極層の上面に形成された個別抵抗体層と、を有し、
個別弾性変形体は導電体もしくは抵抗体から構成されており、その上面は上部個別電極層の下面に接続され、その下端は個別抵抗体層の上面に接触しており、
一対の個別電極層間の間隔を縮める方向に外力が作用すると、個別弾性変形体が弾性変形を生じて当該間隔が縮み、個別弾性変形体と個別抵抗体層の上面との接触面積が増加することにより、一対の個別電極層間の電気抵抗が減少するようにしたものである。
中間要素が、上部個別電極層の下面から下方に凸となるように隆起した形状をなす個別弾性変形体を有し、
個別弾性変形体は抵抗体から構成されており、その上面は上部個別電極層の下面に接続され、その下端は下部個別電極層の上面に接触しており、
一対の個別電極層間の間隔を縮める方向に外力が作用すると、個別弾性変形体が弾性変形を生じて当該間隔が縮み、個別弾性変形体と下部個別電極層の上面との接触面積が増加することにより、一対の個別電極層間の電気抵抗が減少するようにしたものである。
中間要素が、上面が上部個別電極層の下面に接続され、下面が凹凸構造面を有する個別弾性変形体と、下部個別電極層の上面に形成された個別抵抗体層と、を有し、
個別弾性変形体は導電体もしくは抵抗体から構成されており、凹凸構造面は個別抵抗体層の上面に接触しており、
一対の個別電極層間の間隔を縮める方向に外力が作用すると、個別弾性変形体が弾性変形を生じて当該間隔が縮み、個別弾性変形体と個別抵抗体層の上面との接触面積が増加することにより、一対の個別電極層間の電気抵抗が減少するようにしたものである。
中間要素が、上面が上部個別電極層の下面に接続され、下面が凹凸構造面を有する個別弾性変形体を有し、個別弾性変形体は抵抗体から構成されており、凹凸構造面は下部個別電極層の上面に接触しており、
一対の個別電極層間の間隔を縮める方向に外力が作用すると、個別弾性変形体が弾性変形を生じて当該間隔が縮み、個別弾性変形体と下部個別電極層の上面との接触面積が増加することにより、一対の個別電極層間の電気抵抗が減少するようにしたものである。
m行n列の行列状に配置された各検出素子のうち、第i行目(i=1〜m)に配列されたn個の検出素子の上部個別電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、第j列目(j=1〜n)に配列されたm個の検出素子の下部個別電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
検出回路が、第i番目の行方向導電路と第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出するようにしたものである。
行方向接続部および列方向接続部が、クランク状もしくはS字状の屈曲構造を有するようにしたものである。
上部網状部材と、下部網状部材と、検出回路と、を設け、
上部網状部材は、上部支持層と、上部支持層の下面に形成された上部電極層と、上部電極層の下面に形成された変形体層と、を有し、
下部網状部材は、下部支持層と、下部支持層の上面に形成された下部電極層と、下部電極層の上面に形成された抵抗体層と、を有し、
上部支持層は、m行n列の行列を構成するように配置されたm×n個の上部検出素片と、第i行目(i=1〜m)に配列されたn個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部行方向接続部と、第j列目(j=1〜n)に配列されたm個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部列方向接続部と、を有し、
上部電極層は、各上部検出素片の下面に形成されたm×n個の上部個別電極層と、各上部行方向接続部の下面に形成された上部行方向接続電極層と、を有し、第i行目に配列された上部個別電極層および第i行目に配列された上部行方向接続電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、
変形体層は、各上部個別電極層の下面から下方に凸となるように隆起した形状をなすm×n個の個別弾性変形体を有し、各個別弾性変形体は導電体もしくは抵抗体から構成されており、その上面はそれぞれ上方に位置する個々の上部個別電極層の下面に接続され、
下部支持層は、m行n列の行列を構成するように配置されたm×n個の下部検出素片と、第i行目(i=1〜m)に配列されたn個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部行方向接続部と、第j列目(j=1〜n)に配列されたm個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部列方向接続部と、を有し、
下部電極層は、各下部検出素片の上面に形成されたm×n個の下部個別電極層と、各下部列方向接続部の上面に形成された下部列方向接続電極層と、を有し、第j列目に配列された下部個別電極層および第j列目に配列された下部列方向接続電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
抵抗体層は、各下部個別電極層の上面に形成されたm×n個の個別抵抗体層を有し、
上部網状部材は、第i行第j列目(i=1〜m,j=1〜n)に配置された個別弾性変形体の下端が、第i行第j列目に配置された個別抵抗体層の上面に接触するように、下部網状部材の上方に積層配置されており、
検出回路は、第i番目の行方向導電路と第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出するようにしたものである。
上部網状部材と、下部網状部材と、検出回路と、を設け、
上部網状部材は、上部支持層と、上部支持層の下面に形成された上部電極層と、上部電極層の下面に形成された変形体層と、を有し、
下部網状部材は、下部支持層と、下部支持層の上面に形成された下部電極層と、を有し、
上部支持層は、m行n列の行列を構成するように配置されたm×n個の上部検出素片と、第i行目(i=1〜m)に配列されたn個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部行方向接続部と、第j列目(j=1〜n)に配列されたm個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部列方向接続部と、を有し、
上部電極層は、各上部検出素片の下面に形成されたm×n個の上部個別電極層と、各上部行方向接続部の下面に形成された上部行方向接続電極層と、を有し、第i行目に配列された上部個別電極層および第i行目に配列された上部行方向接続電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、
変形体層は、各上部個別電極層の下面から下方に凸となるように隆起した形状をなすm×n個の個別弾性変形体を有し、各個別弾性変形体は抵抗体から構成されており、その上面はそれぞれ上方に位置する個々の上部個別電極層の下面に接続され、
下部支持層は、m行n列の行列を構成するように配置されたm×n個の下部検出素片と、第i行目(i=1〜m)に配列されたn個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部行方向接続部と、第j列目(j=1〜n)に配列されたm個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部列方向接続部と、を有し、
下部電極層は、各下部検出素片の上面に形成されたm×n個の下部個別電極層と、各下部列方向接続部の上面に形成された下部列方向接続電極層と、を有し、第j列目に配列された下部個別電極層および第j列目に配列された下部列方向接続電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
上部網状部材は、第i行第j列目(i=1〜m,j=1〜n)に配置された個別弾性変形体の下端が、第i行第j列目に配置された下部個別電極層の上面に接触するように、下部網状部材の上方に積層配置されており、
検出回路は、第i番目の行方向導電路と第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出するようにしたものである。
上部網状部材と、下部網状部材と、検出回路と、を設け、
上部網状部材は、上部支持層と、上部支持層の下面に形成された上部電極層と、上部電極層の下面に形成された変形体層と、を有し、
下部網状部材は、下部支持層と、下部支持層の上面に形成された下部電極層と、下部電極層の上面に形成された抵抗体層と、を有し、
上部支持層は、m行n列の行列を構成するように配置されたm×n個の上部検出素片と、第i行目(i=1〜m)に配列されたn個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部行方向接続部と、第j列目(j=1〜n)に配列されたm個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部列方向接続部と、を有し、
上部電極層は、各上部検出素片の下面に形成されたm×n個の上部個別電極層と、各上部行方向接続部の下面に形成された上部行方向接続電極層と、を有し、第i行目に配列された上部個別電極層および第i行目に配列された上部行方向接続電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、
変形体層は、上面が各上部個別電極層の下面に接続され、下面が凹凸構造面を有するm×n個の個別弾性変形体を有し、各個別弾性変形体は導電体もしくは抵抗体から構成されており、
下部支持層は、m行n列の行列を構成するように配置されたm×n個の下部検出素片と、第i行目(i=1〜m)に配列されたn個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部行方向接続部と、第j列目(j=1〜n)に配列されたm個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部列方向接続部と、を有し、
下部電極層は、各下部検出素片の上面に形成されたm×n個の下部個別電極層と、各下部列方向接続部の上面に形成された下部列方向接続電極層と、を有し、第j列目に配列された下部個別電極層および第j列目に配列された下部列方向接続電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
抵抗体層は、各下部個別電極層の上面に形成されたm×n個の個別抵抗体層を有し、
上部網状部材は、第i行第j列目(i=1〜m,j=1〜n)に配置された個別弾性変形体の凹凸構造面が、第i行第j列目に配置された個別抵抗体層の上面に接触するように、下部網状部材の上方に積層配置されており、
検出回路は、第i番目の行方向導電路と第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出するようにしたものである。
上部網状部材と、下部網状部材と、検出回路と、を設け、
上部網状部材は、上部支持層と、上部支持層の下面に形成された上部電極層と、上部電極層の下面に形成された変形体層と、を有し、
下部網状部材は、下部支持層と、下部支持層の上面に形成された下部電極層と、を有し、
上部支持層は、m行n列の行列を構成するように配置されたm×n個の上部検出素片と、第i行目(i=1〜m)に配列されたn個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部行方向接続部と、第j列目(j=1〜n)に配列されたm個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部列方向接続部と、を有し、
上部電極層は、各上部検出素片の下面に形成されたm×n個の上部個別電極層と、各上部行方向接続部の下面に形成された上部行方向接続電極層と、を有し、第i行目に配列された上部個別電極層および第i行目に配列された上部行方向接続電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、
変形体層は、上面が各上部個別電極層の下面に接続され、下面が凹凸構造面を有するm×n個の個別弾性変形体を有し、各個別弾性変形体は抵抗体から構成されており、
下部支持層は、m行n列の行列を構成するように配置されたm×n個の下部検出素片と、第i行目(i=1〜m)に配列されたn個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部行方向接続部と、第j列目(j=1〜n)に配列されたm個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部列方向接続部と、を有し、
下部電極層は、各下部検出素片の上面に形成されたm×n個の下部個別電極層と、各下部列方向接続部の上面に形成された下部列方向接続電極層と、を有し、第j列目に配列された下部個別電極層および第j列目に配列された下部列方向接続電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
上部網状部材は、第i行第j列目(i=1〜m,j=1〜n)に配置された個別弾性変形体の凹凸構造面が、第i行第j列目に配置された下部個別電極層の上面に接触するように、下部網状部材の上方に積層配置されており、
検出回路は、第i番目の行方向導電路と第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出するようにしたものである。
上部支持層が、行列の第i行第(n+1)列目(i=1〜m)に相当する各位置に配置されたm個の上部行方向端子支持部と、行列の第i行第n列目(i=1〜m)に配置されたm個の上部検出素片とm個の上部行方向端子支持部とをそれぞれ相互に接続するm個の上部行方向配線支持部と、を更に有し、
上部電極層が、m個の上部行方向端子支持部の下面に形成されたm個の上部行方向端子層と、m個の上部行方向配線支持部の下面に形成されたm個の上部行方向配線層と、を更に有し、第i番目の行方向導電路は、第i番目の上部行方向配線層を介して第i番目の上部行方向端子層に電気的に接続されており、
下部支持層が、行列の第(m+1)行第j列目(j=1〜n)に相当する各位置に配置されたn個の下部列方向端子支持部と、行列の第m行第j列目(j=1〜n)に配置されたn個の下部検出素片とn個の下部列方向端子支持部とをそれぞれ相互に接続するn個の下部列方向配線支持部と、を更に有し、
下部電極層が、n個の下部列方向端子支持部の上面に形成されたn個の下部列方向端子層と、n個の下部列方向配線支持部の上面に形成されたn個の下部列方向配線層と、を更に有し、第j番目の列方向導電路は、第j番目の下部列方向配線層を介して第j番目の下部列方向端子層に電気的に接続されており、
検出回路が、m個の上部行方向端子層およびn個の下部列方向端子層に対する配線を介して、各行方向導電路および各列方向導電路に対して電気的に接続されているようにしたものである。
上部行方向接続部および上部列方向接続部は、それぞれ両端に接続された一対の上部検出素片の三次元空間上での相互位置関係が、三次元の自由度をもって変化できるように、当該一対の上部検出素片を接続する機能を有し、
下部行方向接続部および下部列方向接続部は、それぞれ両端に接続された一対の下部検出素片の三次元空間上での相互位置関係が、三次元の自由度をもって変化できるように、当該一対の下部検出素片を接続する機能を有するようにしたものである。
上部行方向接続部、上部列方向接続部、下部行方向接続部、下部列方向接続部のそれぞれが、平面形状がクランク状もしくはS字状の屈曲構造を有するようにしたものである。
個別弾性変形体を、所定量のカーボンもしくは金属を含有する導電性ゴムによって構成したものである。
個別弾性変形体の周囲に、上端が上部個別電極層の下面に接続され、下端が個別抵抗体層もしくは下部個別電極層の上面に接続されたスペーサ部材を設けるようにしたものである。
上部網状部材と下部網状部材とを積層してなる網状本体部を載置するのに十分な面積をもち、伸縮自在な材料から構成された伸縮性シートを更に設け、下部支持層の下面をこの伸縮性シートの上面に接着するようにしたものである。
上部網状部材と下部網状部材とを積層してなる網状本体部を載置するのに十分な面積をもち、伸縮自在な材料から構成された上部伸縮性シートおよび下部伸縮性シートを更に設け、上部支持層の上面を上部伸縮性シートの下面に接着し、下部支持層の下面を下部伸縮性シートの上面に接着し、上部伸縮性シートの周囲部と下部伸縮性シートの周囲部とを相互に接着することにより、網状本体部を上部伸縮性シートと下部伸縮性シートとの間に内包させるようにしたものである。
個別弾性変形体が、球もしくは回転楕円体をその中心軸に直交する切断面で切断した立体形状を有し、当該切断面が上部個別電極層の下面に接続されているようにしたものである。
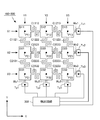
はじめに、本発明の基本的実施形態に係る触覚センサの全体構造を説明する。図1に示すとおり、この触覚センサは、網状本体部100+200と検出回路300とによって構成される。図1の上段は、網状本体部100+200の上面図、下段は検出回路300のブロック図である。ここでは、各部の配置を説明する便宜上、図示のとおり、XYZ三次元座標系を定義することにする。具体的には、図1上段の上面図では、図の右方向にX軸、図の上方向にY軸、図の紙面垂直方向にZ軸が定義されている。
続いて、§1で述べた基本的実施形態に係る触覚センサを構成する網状本体部100+200の各部の構造を、図3〜図14を参照しながら詳細に説明する。この図3〜図14においても、図1,図2に示されたXYZ三次元座標系と同一の座標系を定義して各部の配置を示すことにする。なお、本願の各図は、触覚センサの構造を図面として明瞭に示すため、各部の実際の寸法比とは異なる寸法比で描かれている。そこで、以下の説明では、必要に応じて、各部の実寸を数値として例示することにする。
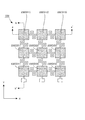
ここでは、まず、上部網状部材100の構造について説明する。図2に示すとおり、上部網状部材100は、上部支持層110、上部電極層120、変形体層130の3層構造からなる。図3は、図2に示す触覚センサの上部支持層110のみを示す上面図である。この図3に示されている上部支持層110の平面形状は、図1に示されている網状本体部100+200全体の平面形状とほぼ同じであるが、列方向配線部Wy1〜Wy3および列方向端子部Ty1〜Ty3は、下部網状部材200の構成要素であるため、図3には描かれていない。
続いて、下部網状部材200の構造について説明する。図2に示すとおり、下部網状部材200は、下部支持層210、下部電極層220、抵抗体層230の3層構造からなる。図9は、図2に示す触覚センサの下部支持層210のみを示す上面図である。この図9に示されている下部支持層210の主たる構造は、図3に示す上部支持層110の構造とほぼ同じであり、両者の相違は、配線支持部および端子支持部の位置のみである。
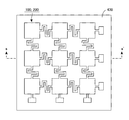
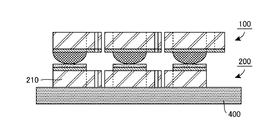
図2の側面図に示す網状本体部100+200は、§2−1で述べた上部網状部材100と§2−2で述べた下部網状部材200とを、図のように上下に積層することにより構成され、本発明に係る触覚センサの物理的な構造部分となる構成要素である。図15は、この網状本体部100+200の上面図である。本発明に係る触覚センサは、この網状本体部100+200に、更に検出回路300を付加することにより構成され、m行n列の行列を構成する位置に配置されたm×n個の検出点に作用した個々の外力を、それぞれ独立して検出する機能を有する。
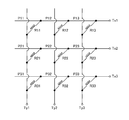
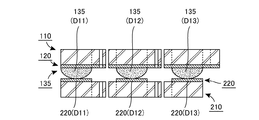
ここでは、これまで述べてきた基本的実施形態に係る触覚センサの動作原理を説明する。図15に示す網状本体部100+200は、既に述べたとおり、3行3列に配置された9個の検出素子D11〜D33を有している。これら検出素子の基本構造は、図16(a) ,(b) の側断面図に示すとおり、上部電極層120および下部電極層220と、これら両電極層の間に挟まれた中間要素とによって構成されている。
これまで、本発明に係る触覚センサを、その基本的実施形態について説明した。ここでは、この基本的実施形態に対するいくつかの変形例を述べておく。
図1の上面図には、検出回路300から行方向端子部Tx1〜Tx3および列方向端子部Ty1〜Ty3に対して配線を施した状態が示されているが、実際の配線は、図5に示す上部電極層120における上部行方向端子層120(Tx1)〜120(Tx3)および図11に示す下部電極層220における下部列方向端子層220(Ty1)〜220(Ty3)に対して行われる。別言すれば、上部行方向端子層120(Tx1)〜120(Tx3)および下部列方向端子層220(Ty1)〜220(Ty3)は、検出回路300に対する配線用のパッドとして機能する。
これまで述べてきた基本的実施形態に用いられている検出素子Dijは、導電体からなる個別弾性変形体130(Dij)と、その下方に配置された個別抵抗体層230(Dij)とを相互に接触させ、両者の接触面Sijの面積に応じて生じる抵抗変化を検出回路300で測定することにより、検出点Pijに作用した外力Fijを検出する構成を採用していた。ここでは、この検出素子の構造に関するいくつかの変形例を示しておく。
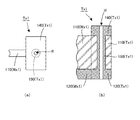
図23(a) に示す検出素子の中間要素は、上部個別電極層120の下面から下方に凸となるように隆起した形状をなす個別弾性変形体130と、下部個別電極層220の上面に形成された個別抵抗体層230と、によって構成される。ここで、個別弾性変形体130は導電体もしくは抵抗体から構成されており、その上面は上部個別電極層120の下面に接続され、その下端は個別抵抗体層230の上面に接触している。そして、一対の個別電極層120,220間の間隔を縮める方向に外力が作用すると、個別弾性変形体130が弾性変形を生じて当該間隔が縮み、個別弾性変形体130と個別抵抗体層230の上面との接触面積が増加することにより、当該一対の個別電極層120,220間の電気抵抗が減少することになる。
図23(b) に示す検出素子の中間要素は、上部個別電極層120の下面から下方に凸となるように隆起した形状をなす個別弾性変形体135によって構成される。ここで、個別弾性変形体135は抵抗体から構成されており、その上面は上部個別電極層120の下面に接続され、その下端は下部個別電極層220の上面に接触している。そして、一対の個別電極層120,220間の間隔を縮める方向に外力が作用すると、個別弾性変形体135が弾性変形を生じて当該間隔が縮み、個別弾性変形体135と下部個別電極層220の上面との接触面積が増加することにより、当該一対の個別電極層120,220間の電気抵抗が減少することになる。
図23(c) に示す検出素子の中間要素は、上面が上部個別電極層120の下面に接続され、下面が凹凸構造面を有する個別弾性変形体160と、下部個別電極層220の上面に形成された個別抵抗体層230と、によって構成される。ここで、個別弾性変形体160は導電体もしくは抵抗体から構成されており、その下面となる凹凸構造面は個別抵抗体層230の上面に接触している。そして、一対の個別電極層120,220間の間隔を縮める方向に外力が作用すると、個別弾性変形体160が弾性変形を生じて当該間隔が縮み、個別弾性変形体160と個別抵抗体層230の上面との接触面積が増加することにより、当該一対の個別電極層120,220間の電気抵抗が減少することになる。
図23(d) に示す検出素子の中間要素は、上面が上部個別電極層120の下面に接続され、下面が凹凸構造面を有する個別弾性変形体165によって構成される。ここで、個別弾性変形体165は抵抗体から構成されており、その下面となる凹凸構造面は下部個別電極層220の上面に接触している。そして、一対の個別電極層120,220間の間隔を縮める方向に外力が作用すると、個別弾性変形体165が弾性変形を生じて当該間隔が縮み、個別弾性変形体165と下部個別電極層220の上面との接触面積が増加することにより、当該一対の個別電極層120,220間の電気抵抗が減少することになる。
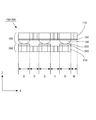
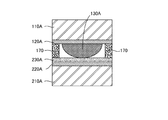
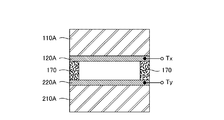
図24は、個々の検出素子にスペーサ部材を設けた変形例を示す側断面図である。この図24に示す検出素子は、基本的には、図23(a) に示す検出素子と同様の構造を有しており、上から下に向かって順に、上部支持層110A,上部電極層120A,変形体層130A,抵抗体層230A,下部電極層220A,下部支持層210Aという6層構造を有する。ここで、各部の機能も、図23(a) に示す検出素子の各部の機能と同じである。
図25は、個々の検出素子として、静電容量を測定するタイプの素子を用いる変形例を示す側断面図である。この図25に示す検出素子は、図24に示す検出素子から、変形体層130Aと抵抗体層230Aとを除去した構造を有している。すなわち、この検出素子は、上から下に向かって順に、上部支持層110A,上部電極層120A,スペーサ部材170で囲まれた空間層,下部電極層220A,下部支持層210Aという5層構造を有する。
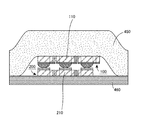
最後に、網状本体部100+200に、伸縮性シートを付加した変形例を述べておく。図26は、このような変形例の上面図、図27は、この変形例を切断線a−a′の位置で切断した側断面図である。この変形例は、図15,図16に示す基本的実施形態に用いられている網状本体部100+200を、伸縮性シート400の上に載せて接着したものである。
110,110A:上部支持層
110(D11)〜110(D33):上部検出素片
110(C1112),110(C1213):上部行方向接続部
110(C2122),110(C2223):上部行方向接続部
110(C3132),110(C3233):上部行方向接続部
110(C1121),110(C2131):上部列方向接続部
110(C2122),110(C2232):上部列方向接続部
110(C1323),110(C2333):上部列方向接続部
110(Wx1)〜110(Wx3):上部行方向配線支持部
110(Tx1)〜110(Tx3):上部行方向端子支持部
120,120A:上部電極層
120(D11)〜120(D33):上部個別電極層
120(C1112),120(C1213):上部行方向接続電極層
120(C2122),120(C2223):上部行方向接続電極層
120(C3132),120(C3233):上部行方向接続電極層
120(Wx1)〜120(Wx3):上部行方向配線層
120(Tx1)〜120(Tx3):上部行方向端子層
130,130A:変形体層(導電性ゴム)
130(D11)〜130(D33):個別弾性変形体
135:変形体層(導電性ゴム)
135(D11)〜135(D33):個別弾性変形体
140(Tx1):上部行方向補助端子層
150(Tx1):上下端子接続部
160:変形体層(導電性ゴム)
165:変形体層(導電性ゴム)
170:スペーサ部材
200:下部網状部材
210,210A:下部支持層
210(D11)〜210(D33):下部検出素片
210(C1112),210(C1213):下部行方向接続部
210(C2122),210(C2223):下部行方向接続部
210(C3132),210(C3233):下部行方向接続部
210(C1121),210(C2131):下部列方向接続部
210(C2122),210(C2232):下部列方向接続部
210(C1323),210(C2333):下部列方向接続部
210(Wy1)〜210(Wy3):下部列方向配線支持部
210(Ty1)〜210(Ty3):下部列方向端子支持部
220,220A:下部電極層
220(D11)〜120(D33):下部個別電極層
220(C1121),220(C2131):下部列方向接続電極層
220(C2122),220(C2232):下部列方向接続電極層
220(C1323),220(C2333):下部列方向接続電極層
220(Wy1)〜220(Wy3):下部列方向配線層
220(Ty1)〜220(Ty3):下部列方向端子層
230,230A:抵抗体層
230(D11)〜230(D33):個別抵抗体層
300:検出回路
400:伸縮性シート
450:上部伸縮性シート
460:下部伸縮性シート
a−a′:切断線
b−b′:切断線
C:接続領域
C1112,C1213:行方向接続部
C2122,C2223:行方向接続部
C3132,C3233:行方向接続部
C1121,C2131:列方向接続部
C1222,C2232:列方向接続部
C1323,C2333:列方向接続部
D:検出領域
D11〜D33:検出素子
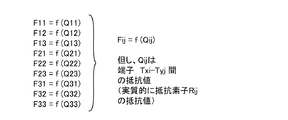
F11〜F33:押圧力
f:変換関数
H:スルーホール
i:行列の行番号
j:行列の列番号
m:行列の総行数
n:行列の総列数
P11〜P33:検出点
Q11〜Q33:端子間の抵抗値
R11〜R33:抵抗素子
S11〜S33:接触面
Tx:上部端子
Tx1〜Tx3:行方向端子部(等価回路上の端子)
Ty:下部端子
Ty1〜Ty3:列方向端子部(等価回路上の端子)
W:配線領域
Wx1〜Wx3:行方向配線部
Wy1〜Wy3:列方向配線部
X:XYZ三次元座標系の座標軸
Xi:行列の第i行目
Y:XYZ三次元座標系の座標軸
Yj:行列の第j列目
Z:XYZ三次元座標系の座標軸
Claims (20)
- m行n列の行列を構成する位置に配置されたm×n個の検出点に作用した個々の外力を検出する触覚センサであって、
前記各検出点の位置に配置され、作用した外力に基づいてその電気的特性に変化が生じるm×n個の検出素子と、
行方向に隣接する各検出素子対を相互に接続する行方向接続部と、列方向に隣接する各検出素子対を相互に接続する列方向接続部と、
を有する網状本体部と、
前記各検出素子に生じた電気的特性の変化に基づいて、当該検出素子が配置されている検出点に作用した外力を検出する検出回路と、
を備え、
前記行方向接続部および前記列方向接続部は可撓性を有し、行方向もしくは列方向に隣接する任意の検出素子対について、両者の三次元空間上での相互位置関係が、三次元の自由度をもって変化できるように構成されていることを特徴とする触覚センサ。 - 請求項1に記載の触覚センサにおいて、
各検出素子が、上方に配置された上部個別電極層と、この上部個別電極層に対向するように下方に配置された下部個別電極層と、これら一対の個別電極層間に介挿された中間要素と、を有し、前記中間要素は、前記一対の個別電極層間の間隔を縮める方向に外力が作用すると、少なくともその一部が弾性変形を生じ、外力が作用しなくなったときに前記間隔を元に復元させる性質をもち、かつ、前記間隔の変化に応じて前記一対の個別電極層間の電気抵抗を変化させる性質をもち、
検出回路が、前記電気抵抗に基づいて、作用した外力を検出することを特徴とする触覚センサ。 - 請求項2に記載の触覚センサにおいて、
中間要素が、上部個別電極層の下面から下方に凸となるように隆起した形状をなす個別弾性変形体と、下部個別電極層の上面に形成された個別抵抗体層と、を有し、
前記個別弾性変形体は導電体もしくは抵抗体から構成されており、その上面は前記上部個別電極層の下面に接続され、その下端は前記個別抵抗体層の上面に接触しており、
一対の個別電極層間の間隔を縮める方向に外力が作用すると、前記個別弾性変形体が弾性変形を生じて前記間隔が縮み、前記個別弾性変形体と前記個別抵抗体層の上面との接触面積が増加することにより、前記一対の個別電極層間の電気抵抗が減少することを特徴とする触覚センサ。 - 請求項2に記載の触覚センサにおいて、
中間要素が、上部個別電極層の下面から下方に凸となるように隆起した形状をなす個別弾性変形体を有し、
前記個別弾性変形体は抵抗体から構成されており、その上面は前記上部個別電極層の下面に接続され、その下端は下部個別電極層の上面に接触しており、
一対の個別電極層間の間隔を縮める方向に外力が作用すると、前記個別弾性変形体が弾性変形を生じて前記間隔が縮み、前記個別弾性変形体と前記下部個別電極層の上面との接触面積が増加することにより、前記一対の個別電極層間の電気抵抗が減少することを特徴とする触覚センサ。 - 請求項2に記載の触覚センサにおいて、
中間要素が、上面が上部個別電極層の下面に接続され、下面が凹凸構造面を有する個別弾性変形体と、下部個別電極層の上面に形成された個別抵抗体層と、を有し、
前記個別弾性変形体は導電体もしくは抵抗体から構成されており、前記凹凸構造面は前記個別抵抗体層の上面に接触しており、
一対の個別電極層間の間隔を縮める方向に外力が作用すると、前記個別弾性変形体が弾性変形を生じて前記間隔が縮み、前記個別弾性変形体と前記個別抵抗体層の上面との接触面積が増加することにより、前記一対の個別電極層間の電気抵抗が減少することを特徴とする触覚センサ。 - 請求項2に記載の触覚センサにおいて、
中間要素が、上面が上部個別電極層の下面に接続され、下面が凹凸構造面を有する個別弾性変形体を有し、前記個別弾性変形体は抵抗体から構成されており、前記凹凸構造面は前記下部個別電極層の上面に接触しており、
一対の個別電極層間の間隔を縮める方向に外力が作用すると、前記個別弾性変形体が弾性変形を生じて前記間隔が縮み、前記個別弾性変形体と前記下部個別電極層の上面との接触面積が増加することにより、前記一対の個別電極層間の電気抵抗が減少することを特徴とする触覚センサ。 - 請求項3〜6のいずれかに記載の触覚センサにおいて、
m行n列の行列状に配置された各検出素子のうち、第i行目(i=1〜m)に配列されたn個の検出素子の上部個別電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、第j列目(j=1〜n)に配列されたm個の検出素子の下部個別電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
検出回路が、前記第i番目の行方向導電路と前記第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出することを特徴とする触覚センサ。 - 請求項1〜7のいずれかに記載の触覚センサにおいて、
行方向接続部および列方向接続部が、クランク状もしくはS字状の屈曲構造を有することを特徴とする触覚センサ。 - m行n列の行列を構成する位置に配置されたm×n個の検出点に作用した個々の外力を検出する触覚センサであって、
上部網状部材と、下部網状部材と、検出回路と、を備え、
前記上部網状部材は、上部支持層と、前記上部支持層の下面に形成された上部電極層と、前記上部電極層の下面に形成された変形体層と、を有し、
前記下部網状部材は、下部支持層と、前記下部支持層の上面に形成された下部電極層と、前記下部電極層の上面に形成された抵抗体層と、を有し、
前記上部支持層は、前記m行n列の行列を構成するように配置されたm×n個の上部検出素片と、第i行目(i=1〜m)に配列されたn個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部行方向接続部と、第j列目(j=1〜n)に配列されたm個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部列方向接続部と、を有し、
前記上部電極層は、前記各上部検出素片の下面に形成されたm×n個の上部個別電極層と、前記各上部行方向接続部の下面に形成された上部行方向接続電極層と、を有し、第i行目に配列された上部個別電極層および第i行目に配列された上部行方向接続電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、
前記変形体層は、前記各上部個別電極層の下面から下方に凸となるように隆起した形状をなすm×n個の個別弾性変形体を有し、前記各個別弾性変形体は導電体もしくは抵抗体から構成されており、その上面はそれぞれ上方に位置する個々の上部個別電極層の下面に接続され、
前記下部支持層は、前記m行n列の行列を構成するように配置されたm×n個の下部検出素片と、第i行目(i=1〜m)に配列されたn個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部行方向接続部と、第j列目(j=1〜n)に配列されたm個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部列方向接続部と、を有し、
前記下部電極層は、前記各下部検出素片の上面に形成されたm×n個の下部個別電極層と、前記各下部列方向接続部の上面に形成された下部列方向接続電極層と、を有し、第j列目に配列された下部個別電極層および第j列目に配列された下部列方向接続電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
前記抵抗体層は、前記各下部個別電極層の上面に形成されたm×n個の個別抵抗体層を有し、
前記上部網状部材は、第i行第j列目(i=1〜m,j=1〜n)に配置された個別弾性変形体の下端が、第i行第j列目に配置された個別抵抗体層の上面に接触するように、前記下部網状部材の上方に積層配置されており、
前記検出回路は、前記第i番目の行方向導電路と前記第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出することを特徴とする触覚センサ。 - m行n列の行列を構成する位置に配置されたm×n個の検出点に作用した個々の外力を検出する触覚センサであって、
上部網状部材と、下部網状部材と、検出回路と、を備え、
前記上部網状部材は、上部支持層と、前記上部支持層の下面に形成された上部電極層と、前記上部電極層の下面に形成された変形体層と、を有し、
前記下部網状部材は、下部支持層と、前記下部支持層の上面に形成された下部電極層と、を有し、
前記上部支持層は、前記m行n列の行列を構成するように配置されたm×n個の上部検出素片と、第i行目(i=1〜m)に配列されたn個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部行方向接続部と、第j列目(j=1〜n)に配列されたm個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部列方向接続部と、を有し、
前記上部電極層は、前記各上部検出素片の下面に形成されたm×n個の上部個別電極層と、前記各上部行方向接続部の下面に形成された上部行方向接続電極層と、を有し、第i行目に配列された上部個別電極層および第i行目に配列された上部行方向接続電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、
前記変形体層は、前記各上部個別電極層の下面から下方に凸となるように隆起した形状をなすm×n個の個別弾性変形体を有し、前記各個別弾性変形体は抵抗体から構成されており、その上面はそれぞれ上方に位置する個々の上部個別電極層の下面に接続され、
前記下部支持層は、前記m行n列の行列を構成するように配置されたm×n個の下部検出素片と、第i行目(i=1〜m)に配列されたn個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部行方向接続部と、第j列目(j=1〜n)に配列されたm個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部列方向接続部と、を有し、
前記下部電極層は、前記各下部検出素片の上面に形成されたm×n個の下部個別電極層と、前記各下部列方向接続部の上面に形成された下部列方向接続電極層と、を有し、第j列目に配列された下部個別電極層および第j列目に配列された下部列方向接続電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
前記上部網状部材は、第i行第j列目(i=1〜m,j=1〜n)に配置された個別弾性変形体の下端が、第i行第j列目に配置された下部個別電極層の上面に接触するように、前記下部網状部材の上方に積層配置されており、
前記検出回路は、前記第i番目の行方向導電路と前記第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出することを特徴とする触覚センサ。 - m行n列の行列を構成する位置に配置されたm×n個の検出点に作用した個々の外力を検出する触覚センサであって、
上部網状部材と、下部網状部材と、検出回路と、を備え、
前記上部網状部材は、上部支持層と、前記上部支持層の下面に形成された上部電極層と、前記上部電極層の下面に形成された変形体層と、を有し、
前記下部網状部材は、下部支持層と、前記下部支持層の上面に形成された下部電極層と、前記下部電極層の上面に形成された抵抗体層と、を有し、
前記上部支持層は、前記m行n列の行列を構成するように配置されたm×n個の上部検出素片と、第i行目(i=1〜m)に配列されたn個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部行方向接続部と、第j列目(j=1〜n)に配列されたm個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部列方向接続部と、を有し、
前記上部電極層は、前記各上部検出素片の下面に形成されたm×n個の上部個別電極層と、前記各上部行方向接続部の下面に形成された上部行方向接続電極層と、を有し、第i行目に配列された上部個別電極層および第i行目に配列された上部行方向接続電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、
前記変形体層は、上面が前記各上部個別電極層の下面に接続され、下面が凹凸構造面を有するm×n個の個別弾性変形体を有し、前記各個別弾性変形体は導電体もしくは抵抗体から構成されており、
前記下部支持層は、前記m行n列の行列を構成するように配置されたm×n個の下部検出素片と、第i行目(i=1〜m)に配列されたn個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部行方向接続部と、第j列目(j=1〜n)に配列されたm個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部列方向接続部と、を有し、
前記下部電極層は、前記各下部検出素片の上面に形成されたm×n個の下部個別電極層と、前記各下部列方向接続部の上面に形成された下部列方向接続電極層と、を有し、第j列目に配列された下部個別電極層および第j列目に配列された下部列方向接続電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
前記抵抗体層は、前記各下部個別電極層の上面に形成されたm×n個の個別抵抗体層を有し、
前記上部網状部材は、第i行第j列目(i=1〜m,j=1〜n)に配置された個別弾性変形体の凹凸構造面が、第i行第j列目に配置された個別抵抗体層の上面に接触するように、前記下部網状部材の上方に積層配置されており、
前記検出回路は、前記第i番目の行方向導電路と前記第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出することを特徴とする触覚センサ。 - m行n列の行列を構成する位置に配置されたm×n個の検出点に作用した個々の外力を検出する触覚センサであって、
上部網状部材と、下部網状部材と、検出回路と、を備え、
前記上部網状部材は、上部支持層と、前記上部支持層の下面に形成された上部電極層と、前記上部電極層の下面に形成された変形体層と、を有し、
前記下部網状部材は、下部支持層と、前記下部支持層の上面に形成された下部電極層と、を有し、
前記上部支持層は、前記m行n列の行列を構成するように配置されたm×n個の上部検出素片と、第i行目(i=1〜m)に配列されたn個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部行方向接続部と、第j列目(j=1〜n)に配列されたm個の上部検出素片のうち、それぞれ隣接する一対の上部検出素片を相互に接続する可撓性をもった上部列方向接続部と、を有し、
前記上部電極層は、前記各上部検出素片の下面に形成されたm×n個の上部個別電極層と、前記各上部行方向接続部の下面に形成された上部行方向接続電極層と、を有し、第i行目に配列された上部個別電極層および第i行目に配列された上部行方向接続電極層は相互に電気的に接続され、第i番目の行方向導電路を形成し、
前記変形体層は、上面が前記各上部個別電極層の下面に接続され、下面が凹凸構造面を有するm×n個の個別弾性変形体を有し、前記各個別弾性変形体は抵抗体から構成されており、
前記下部支持層は、前記m行n列の行列を構成するように配置されたm×n個の下部検出素片と、第i行目(i=1〜m)に配列されたn個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部行方向接続部と、第j列目(j=1〜n)に配列されたm個の下部検出素片のうち、それぞれ隣接する一対の下部検出素片を相互に接続する可撓性をもった下部列方向接続部と、を有し、
前記下部電極層は、前記各下部検出素片の上面に形成されたm×n個の下部個別電極層と、前記各下部列方向接続部の上面に形成された下部列方向接続電極層と、を有し、第j列目に配列された下部個別電極層および第j列目に配列された下部列方向接続電極層は相互に電気的に接続され、第j番目の列方向導電路を形成し、
前記上部網状部材は、第i行第j列目(i=1〜m,j=1〜n)に配置された個別弾性変形体の凹凸構造面が、第i行第j列目に配置された下部個別電極層の上面に接触するように、前記下部網状部材の上方に積層配置されており、
前記検出回路は、前記第i番目の行方向導電路と前記第j番目の列方向導電路との間の電気抵抗に基づいて、第i行第j列目(i=1〜m,j=1〜n)に配置された検出点に作用した外力を検出することを特徴とする触覚センサ。 - 請求項9〜12のいずれかに記載の触覚センサにおいて、
上部支持層が、行列の第i行第(n+1)列目(i=1〜m)に相当する各位置に配置されたm個の上部行方向端子支持部と、行列の第i行第n列目(i=1〜m)に配置されたm個の上部検出素片と前記m個の上部行方向端子支持部とをそれぞれ相互に接続するm個の上部行方向配線支持部と、を更に有し、
上部電極層が、前記m個の上部行方向端子支持部の下面に形成されたm個の上部行方向端子層と、前記m個の上部行方向配線支持部の下面に形成されたm個の上部行方向配線層と、を更に有し、第i番目の行方向導電路は、第i番目の上部行方向配線層を介して第i番目の上部行方向端子層に電気的に接続されており、
下部支持層が、行列の第(m+1)行第j列目(j=1〜n)に相当する各位置に配置されたn個の下部列方向端子支持部と、行列の第m行第j列目(j=1〜n)に配置されたn個の下部検出素片と前記n個の下部列方向端子支持部とをそれぞれ相互に接続するn個の下部列方向配線支持部と、を更に有し、
下部電極層が、前記n個の下部列方向端子支持部の上面に形成されたn個の下部列方向端子層と、前記n個の下部列方向配線支持部の上面に形成されたn個の下部列方向配線層と、を更に有し、第j番目の列方向導電路は、第j番目の下部列方向配線層を介して第j番目の下部列方向端子層に電気的に接続されており、
検出回路が、前記m個の上部行方向端子層および前記n個の下部列方向端子層に対する配線を介して、各行方向導電路および各列方向導電路に対して電気的に接続されていることを特徴とする触覚センサ。 - 請求項9〜13のいずれかに記載の触覚センサにおいて、
上部行方向接続部および上部列方向接続部は、それぞれ両端に接続された一対の上部検出素片の三次元空間上での相互位置関係が、三次元の自由度をもって変化できるように、前記一対の上部検出素片を接続する機能を有し、
下部行方向接続部および下部列方向接続部は、それぞれ両端に接続された一対の下部検出素片の三次元空間上での相互位置関係が、三次元の自由度をもって変化できるように、前記一対の下部検出素片を接続する機能を有することを特徴とする触覚センサ。 - 請求項9〜13のいずれかに記載の触覚センサにおいて、
上部行方向接続部、上部列方向接続部、下部行方向接続部、下部列方向接続部のそれぞれが、平面形状がクランク状もしくはS字状の屈曲構造を有することを特徴とする触覚センサ。 - 請求項9〜15のいずれかに記載の触覚センサにおいて、
個別弾性変形体が、所定量のカーボンもしくは金属を含有する導電性ゴムによって構成されていることを特徴とする触覚センサ。 - 請求項9〜16のいずれかに記載の触覚センサにおいて、
個別弾性変形体の周囲に、上端が上部個別電極層の下面に接続され、下端が個別抵抗体層もしくは下部個別電極層の上面に接続されたスペーサ部材を設けたことを特徴とする触覚センサ。 - 請求項9〜17のいずれかに記載の触覚センサにおいて、
上部網状部材と下部網状部材とを積層してなる網状本体部を載置するのに十分な面積をもち、伸縮自在な材料から構成された伸縮性シートを更に設け、下部支持層の下面を前記伸縮性シートの上面に接着したことを特徴とする触覚センサ。 - 請求項9〜17のいずれかに記載の触覚センサにおいて、
上部網状部材と下部網状部材とを積層してなる網状本体部を載置するのに十分な面積をもち、伸縮自在な材料から構成された上部伸縮性シートおよび下部伸縮性シートを更に設け、上部支持層の上面を前記上部伸縮性シートの下面に接着し、下部支持層の下面を前記下部伸縮性シートの上面に接着し、前記上部伸縮性シートの周囲部と前記下部伸縮性シートの周囲部とを相互に接着することにより、前記網状本体部を前記上部伸縮性シートと前記下部伸縮性シートとの間に内包させたことを特徴とする触覚センサ。 - 請求項3,4,9,10のいずれかに記載の触覚センサにおいて、
個別弾性変形体が、球もしくは回転楕円体をその中心軸に直交する切断面で切断した立体形状を有し、前記切断面が上部個別電極層の下面に接続されていることを特徴とする触覚センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013259114A JP5519068B1 (ja) | 2013-12-16 | 2013-12-16 | 触覚センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013259114A JP5519068B1 (ja) | 2013-12-16 | 2013-12-16 | 触覚センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5519068B1 JP5519068B1 (ja) | 2014-06-11 |
| JP2015114308A true JP2015114308A (ja) | 2015-06-22 |
Family
ID=51031299
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013259114A Expired - Fee Related JP5519068B1 (ja) | 2013-12-16 | 2013-12-16 | 触覚センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5519068B1 (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017072472A (ja) * | 2015-10-07 | 2017-04-13 | ニッタ株式会社 | 感圧センサ |
| KR101738256B1 (ko) * | 2015-09-09 | 2017-05-23 | 성균관대학교산학협력단 | 촉각 센서 |
| JP2017091254A (ja) * | 2015-11-11 | 2017-05-25 | アルプス電気株式会社 | 入力装置 |
| JP2018063175A (ja) * | 2016-10-13 | 2018-04-19 | Nissha株式会社 | 圧力センサ |
| CN108681412A (zh) * | 2018-04-12 | 2018-10-19 | 清华大学 | 一种基于阵列式触觉传感器的情感识别装置及方法 |
| KR102056000B1 (ko) * | 2018-03-27 | 2019-12-16 | 한양대학교 산학협력단 | 플렉서블 센서 및 그 제조 방법 |
| KR102153937B1 (ko) * | 2020-02-04 | 2020-09-10 | 주식회사 폴리웍스 | 무정형 신축이 가능한 감압센서 시트 |
| JP2021001839A (ja) * | 2019-06-24 | 2021-01-07 | 国立大学法人弘前大学 | 接着力センサ、多点接着力センサおよび多点接着力センサの製造方法 |
| US10908034B2 (en) | 2016-11-25 | 2021-02-02 | Panasonic Intellectual Property Management Co., Ltd. | Pressure-sensitive element and steering device |
| JPWO2021140967A1 (ja) * | 2020-01-06 | 2021-07-15 | ||
| US11137297B2 (en) | 2017-03-23 | 2021-10-05 | Panasonic Intellectual Property Management Co., Ltd. | Tactile sensor, and tactile sensor unit constituting tactile sensor |
| WO2022239353A1 (ja) * | 2021-05-14 | 2022-11-17 | パナソニックIpマネジメント株式会社 | 荷重センサ |
| JP2023108953A (ja) * | 2022-01-26 | 2023-08-07 | 株式会社ジャパンディスプレイ | 圧力センサ |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018007811A (ja) * | 2016-07-13 | 2018-01-18 | ロレアル | タッピングデバイス |
| JP7281630B2 (ja) | 2018-10-18 | 2023-05-26 | パナソニックIpマネジメント株式会社 | 感圧素子および電子機器 |
| WO2020153029A1 (ja) | 2019-01-24 | 2020-07-30 | パナソニックIpマネジメント株式会社 | 感圧素子 |
| CN111896163A (zh) * | 2019-05-06 | 2020-11-06 | 北京他山科技有限公司 | 一种电阻式触摸传感器、电子皮肤和智能机器人 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6461626A (en) * | 1987-09-02 | 1989-03-08 | Yokohama Rubber Co Ltd | Unit type distribution pressure sensor |
| JP2646387B2 (ja) * | 1989-01-10 | 1997-08-27 | 横浜ゴム株式会社 | 曲面用分布型触覚センサ |
| JPH0436627A (ja) * | 1990-05-31 | 1992-02-06 | Nitta Ind Corp | 感圧導電性エラストマー組成物とこれを利用して構成した感圧センサ |
-
2013
- 2013-12-16 JP JP2013259114A patent/JP5519068B1/ja not_active Expired - Fee Related
Cited By (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101738256B1 (ko) * | 2015-09-09 | 2017-05-23 | 성균관대학교산학협력단 | 촉각 센서 |
| US9851223B2 (en) | 2015-09-09 | 2017-12-26 | Research & Business Foundation Sungkyunkwan University | Tactile sensor |
| JP2017072472A (ja) * | 2015-10-07 | 2017-04-13 | ニッタ株式会社 | 感圧センサ |
| JP2017091254A (ja) * | 2015-11-11 | 2017-05-25 | アルプス電気株式会社 | 入力装置 |
| US10605679B2 (en) | 2016-10-13 | 2020-03-31 | Nissha Co., Ltd. | Pressure sensor |
| WO2018070123A1 (ja) * | 2016-10-13 | 2018-04-19 | Nissha株式会社 | 圧力センサ |
| CN109791080A (zh) * | 2016-10-13 | 2019-05-21 | 日写株式会社 | 压力传感器 |
| JP2018063175A (ja) * | 2016-10-13 | 2018-04-19 | Nissha株式会社 | 圧力センサ |
| US10908034B2 (en) | 2016-11-25 | 2021-02-02 | Panasonic Intellectual Property Management Co., Ltd. | Pressure-sensitive element and steering device |
| US11137297B2 (en) | 2017-03-23 | 2021-10-05 | Panasonic Intellectual Property Management Co., Ltd. | Tactile sensor, and tactile sensor unit constituting tactile sensor |
| KR102056000B1 (ko) * | 2018-03-27 | 2019-12-16 | 한양대학교 산학협력단 | 플렉서블 센서 및 그 제조 방법 |
| CN108681412A (zh) * | 2018-04-12 | 2018-10-19 | 清华大学 | 一种基于阵列式触觉传感器的情感识别装置及方法 |
| CN108681412B (zh) * | 2018-04-12 | 2020-06-02 | 清华大学 | 一种基于阵列式触觉传感器的情感识别装置及方法 |
| JP2021001839A (ja) * | 2019-06-24 | 2021-01-07 | 国立大学法人弘前大学 | 接着力センサ、多点接着力センサおよび多点接着力センサの製造方法 |
| JPWO2021140967A1 (ja) * | 2020-01-06 | 2021-07-15 | ||
| WO2021140967A1 (ja) * | 2020-01-06 | 2021-07-15 | ソニーグループ株式会社 | 圧力センサおよび電子機器 |
| JP7571736B2 (ja) | 2020-01-06 | 2024-10-23 | ソニーグループ株式会社 | 圧力センサおよび電子機器 |
| US12203817B2 (en) | 2020-01-06 | 2025-01-21 | Sony Group Corporation | Convex surface shaped electrostatic capacitance type pressure sensor used in electronic devices |
| KR102153937B1 (ko) * | 2020-02-04 | 2020-09-10 | 주식회사 폴리웍스 | 무정형 신축이 가능한 감압센서 시트 |
| WO2022239353A1 (ja) * | 2021-05-14 | 2022-11-17 | パナソニックIpマネジメント株式会社 | 荷重センサ |
| JPWO2022239353A1 (ja) * | 2021-05-14 | 2022-11-17 | ||
| CN117242325A (zh) * | 2021-05-14 | 2023-12-15 | 松下知识产权经营株式会社 | 载荷传感器 |
| JP2023108953A (ja) * | 2022-01-26 | 2023-08-07 | 株式会社ジャパンディスプレイ | 圧力センサ |
| JP7825432B2 (ja) | 2022-01-26 | 2026-03-06 | 株式会社ジャパンディスプレイ | 圧力センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5519068B1 (ja) | 2014-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5519068B1 (ja) | 触覚センサ | |
| EP4004513B1 (en) | A compliant tri-axial force sensor and method of fabricating the same | |
| CN105224129B (zh) | 一种压力感测输入装置 | |
| CN103743503B (zh) | 基于压阻式和电容式组合的柔性三维力触觉传感器 | |
| US9671297B2 (en) | Pliable pressure-sensing fabric | |
| CN203672526U (zh) | 一种基于压阻式和电容式组合的柔性三维力触觉传感器 | |
| CN204576454U (zh) | 具有柔性层的温度补偿透明力传感器 | |
| JP6300156B2 (ja) | 伸縮性フレキシブル基板およびその製造方法 | |
| US7538760B2 (en) | Force imaging input device and system | |
| JP7199382B2 (ja) | 可撓性回路パッケージ | |
| CN107710116B (zh) | 显示一体型输入装置 | |
| CN106249969B (zh) | 感测装置 | |
| CN104406627A (zh) | 假肢手穿戴式柔性触觉传感器及其触觉检测系统 | |
| JP6291329B2 (ja) | 感圧素子、圧力センサおよび表示デバイス | |
| CN107924228A (zh) | 层布置以及输入/输出设备 | |
| CN205080530U (zh) | 压力感测输入装置 | |
| CN103988155A (zh) | 触控面板的电极图案及其制造方法 | |
| WO2018231808A1 (en) | A dual use strain sensor | |
| CN113386158B (zh) | 一种全打印仿生超感知柔性机器人皮肤 | |
| US20170234673A1 (en) | Pliable pressure-sending fabric | |
| CN117629474A (zh) | 一种基于平面电阻结构的柔性分布式三维触觉传感器 | |
| DK181377B1 (en) | Tactile sensor, matrix of tactile sensors, and methods for producing the same | |
| KR20220022109A (ko) | 터치 패널 | |
| CN118732851A (zh) | 一种手势捕捉和触觉反馈功能的智能手套及人机交互设备 | |
| KR20250107261A (ko) | 입력 장치, 및 입력 장치에 있어서의 출력 검출 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140314 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140401 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140402 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5519068 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S201 | Request for registration of exclusive licence |
Free format text: JAPANESE INTERMEDIATE CODE: R314201 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R370 | Written measure of declining of transfer procedure |
Free format text: JAPANESE INTERMEDIATE CODE: R370 |
|
| S201 | Request for registration of exclusive licence |
Free format text: JAPANESE INTERMEDIATE CODE: R314201 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S804 | Written request for registration of cancellation of exclusive licence |
Free format text: JAPANESE INTERMEDIATE CODE: R314803 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S804 | Written request for registration of cancellation of exclusive licence |
Free format text: JAPANESE INTERMEDIATE CODE: R314803 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |