JP2015073741A - ミシンの糸切り機構 - Google Patents
ミシンの糸切り機構 Download PDFInfo
- Publication number
- JP2015073741A JP2015073741A JP2013212065A JP2013212065A JP2015073741A JP 2015073741 A JP2015073741 A JP 2015073741A JP 2013212065 A JP2013212065 A JP 2013212065A JP 2013212065 A JP2013212065 A JP 2013212065A JP 2015073741 A JP2015073741 A JP 2015073741A
- Authority
- JP
- Japan
- Prior art keywords
- thread
- cutter
- thread trimming
- sewing machine
- hook
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000009958 sewing Methods 0.000 title claims abstract description 81
- 238000005520 cutting process Methods 0.000 title abstract description 12
- 238000009966 trimming Methods 0.000 claims description 109
- 238000009434 installation Methods 0.000 claims description 13
- 230000000149 penetrating effect Effects 0.000 claims description 3
- 238000003825 pressing Methods 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 11
- 230000005540 biological transmission Effects 0.000 description 7
- 230000000694 effects Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000035515 penetration Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000000354 decomposition reaction Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
Images





Landscapes
- Sewing Machines And Sewing (AREA)
Abstract
【課題】ジグザグミシンに用いるミシンの糸切り機構を提供する。【解決手段】ミシンの糸切り機構はミシンプラットホーム11を備え、ミシンの糸切り機構は駆動アセンブリ2、糸切りアセンブリ3を備え、駆動アセンブリ2はステップモーター21、ステップモーター21に可動状に接続するスイング棒22、ステップモーター21とスイング棒22に連接し、ステップモーター21の駆動を受けて往復移動を行う押し棒23を備え、糸切りアセンブリ3はミシンプラットホーム11上に設置し、糸切りアセンブリ3はスイング部222と連接し、スイング部222の連動を受けて往復移動を行い、ミシン糸4を引っ掛けて戻し、糸フックルートRを備える糸フックカッター31糸フックルートR上に設置し、糸フックカッター31においてミシン糸4を引っ掛けて戻す時にミシン糸4を切断する糸切りカッター32を備える。【選択図】図2
Description
本発明は自動糸切り装置に関し、特にジグザグミシンに用いるダイレクトドライブ自動糸切り機構に関する。
従来のミシンは、縫い終わりに近づくと、糸切り機構により、次のミシン作業に備え、糸を切断する。特許文献1に開示する3本のアームを備えるミシンの糸切り構造では、ミシン上に糸切り構造を設置する。糸切り構造は、信号の制御を受けて、糸切り構造の作動を駆動する駆動セットを備える。駆動セットは、動力源により押上げ棒を連動し、突出行程を行わせた後、元に戻る前後造作を行わせる。これにより、押上げ棒は、連棒セットを連動し、糸フックセットのフック作動を連動し、作業中糸の末端を引っ掛けて引き戻し、糸入りカッターにより切断し、人の手により糸を切る必要はなく、自動糸切りの目的を達成する。
特許文献2は、ミシンの糸切断装置を掲示する。同構造は、ミシン機体上に連接する。切断装置は、カム機構、固定保持機構、サポート機構、ハサミ駆動セット、糸ハサミを備える。カム機構は、カム、ハサミ、カム定位アームを備える。固定保持機構は、固定アーム、固定アームに相対してスライド移動を行う移動アセンブリを備える。サポート機構は、定位カムの駆動を受け、しかも移動アセンブリに連接する底板、及び底板に連接するサポートアームセットを備える。ハサミ駆動セットは、ハサミカムアームに連接し、及びサポートアームセットに可動状に接続するレバーを備える。糸ハサミは、サポートアームセットに連接する固定ブレード、及び固定ブレードに連接する可動ブレードを備える。
しかし、上記したミシン特許の糸切り機構では、その駆動カッターの構造はどれも、2個以上の連棒が組成する連棒セットにより、連動されている。このため、構造の複雑性を拡大するだけでなく、伝動過程においては、各連棒間のサイズ差、或いは緩み/脱落などの問題により、誤差が生じ、糸切り作業を正確に行うことができなくなってしまう。さらに、従来の糸切り機構は、カムの回転を制御する定位モーターの駆動を通して、定位モーターによりカムの回転スピードをコントロールし、ハサミ駆動セットの糸切り速度をコントロールするのであって、定位モーターによりハサミ駆動セットをダイレクトにコントロールするのではなく、ハサミ駆動セットと定位モーター間には、カムがあり、間接駆動に属する。そのため、糸切り作業を正確に制御することができない。
本発明の主要な目的は、多数の連棒とカムとの伝動構造を利用し、糸切りカッターセットを駆動するため、糸切りカッターセットを正確にコントロールできないという従来の構造に存在する欠点を解決することができるミシンの糸切り機構を提供することである。
上述の目的を解決するため、本発明は下記のミシンの糸切り機構を提供する。
ミシンの糸切り機構は、ミシン上に設置し、
該ミシンは、ミシンプラットホームを備え、
ミシンの糸切り機構は、駆動アセンブリ、該駆動アセンブリの駆動を受ける糸切りアセンブリを備え、
該駆動アセンブリは、ステップモーター、該ステップモーターに可動状に接続するスイング棒、該ステップモーターと該スイング棒に連接し、該ステップモーターの駆動を受けて往復移動を行う押し棒を備え、
該スイング棒は、該ステップモーターと可動状に接続する可動接続部、該押し棒と連接し、該押し棒の連動を受けて、該可動接続部を支点として回転するスイング部を備え、
該糸切りアセンブリは、該ミシンプラットホーム上に設置し、
該糸切りアセンブリは、該スイング部と連接し、該スイング部の連動を受けて往復移動を行い、ミシン糸を引っ掛けて戻し、糸フックルートを備える糸フックカッター、該糸フックルート上に設置し、該糸フックカッターにおいて、ミシン糸を引っ掛けて戻す時にミシン糸を切断する糸切りカッターを備える。
ミシンの糸切り機構は、ミシン上に設置し、
該ミシンは、ミシンプラットホームを備え、
ミシンの糸切り機構は、駆動アセンブリ、該駆動アセンブリの駆動を受ける糸切りアセンブリを備え、
該駆動アセンブリは、ステップモーター、該ステップモーターに可動状に接続するスイング棒、該ステップモーターと該スイング棒に連接し、該ステップモーターの駆動を受けて往復移動を行う押し棒を備え、
該スイング棒は、該ステップモーターと可動状に接続する可動接続部、該押し棒と連接し、該押し棒の連動を受けて、該可動接続部を支点として回転するスイング部を備え、
該糸切りアセンブリは、該ミシンプラットホーム上に設置し、
該糸切りアセンブリは、該スイング部と連接し、該スイング部の連動を受けて往復移動を行い、ミシン糸を引っ掛けて戻し、糸フックルートを備える糸フックカッター、該糸フックルート上に設置し、該糸フックカッターにおいて、ミシン糸を引っ掛けて戻す時にミシン糸を切断する糸切りカッターを備える。
該糸切りアセンブリは、該ミシンプラットホーム上に設置するキャリア部、該糸フックルートに沿って、該キャリア部上に開設し、該糸切りカッターと該糸フックカッターとに、往復スライド移動を行わせるスライド槽を備える。
該糸切りアセンブリはさらに、該スライド槽両端に突出し、該糸切りカッターの移動を制限する2個の突出設置部を備える。
該糸切りアセンブリは、該キャリア部上を覆い、該糸切りカッターの垂直位置を制限する蓋板、該スライド槽端口に設置し、該糸フックカッターを押上げ、該糸フックカッターと該糸切りカッターとを密着させる押上げ部を備える。
該糸切りアセンブリはさらに、該スライド槽両端に突出し、該糸切りカッターの移動を制限する2個の突出設置部を備える。
該糸切りアセンブリは、該キャリア部上を覆い、該糸切りカッターの垂直位置を制限する蓋板、該スライド槽端口に設置し、該糸フックカッターを押上げ、該糸フックカッターと該糸切りカッターとを密着させる押上げ部を備える。
該糸切りカッターは、一端縁に設置するブレード部、該糸フックルートに沿って設置する開孔を備え、
該糸フックカッターは、該開孔を貫通し、移動時に、該開孔の孔壁に接触して、該糸切りカッターの移動を連動する貫通設置部、該ブレード部と同じ側に設置し、ミシン糸を引っ掛けて戻す糸フック部を備える。
該糸フックカッターは、該開孔を貫通し、移動時に、該開孔の孔壁に接触して、該糸切りカッターの移動を連動する貫通設置部、該ブレード部と同じ側に設置し、ミシン糸を引っ掛けて戻す糸フック部を備える。
該糸切りカッターは、反対端縁に設置する接触部を備え、
該糸フックカッターは、該接触部と同じ側に設置する押し接触部を備え、
該糸切りアセンブリは、該糸切りカッター片側に設置する可動位置限定部を備え、
該可動位置限定部は、弾力を提供する弾性部品、弾力の駆動を受けて、回転を行い、該糸フックカッターがミシン糸の方へと移動すると、該接触部と接触し、該糸切りカッターの移動を制限し、該糸フックカッターがミシン糸を引っ掛けて戻す時、該押し接触部の押される回転アームを備える。
該糸フックカッターは、該接触部と同じ側に設置する押し接触部を備え、
該糸切りアセンブリは、該糸切りカッター片側に設置する可動位置限定部を備え、
該可動位置限定部は、弾力を提供する弾性部品、弾力の駆動を受けて、回転を行い、該糸フックカッターがミシン糸の方へと移動すると、該接触部と接触し、該糸切りカッターの移動を制限し、該糸フックカッターがミシン糸を引っ掛けて戻す時、該押し接触部の押される回転アームを備える。
該ステップモーターは、回転盤、該回転盤上に設置し、該押し棒と可動状に接続し、該回転盤が回転する時に、該押し棒を連動し、往復移動を行わせる連動部を備える。
該スイング棒は、該スイング部と連接し、該スイング部の連動を受け、該可動接続部を支点として回転するリセット部を備え、該駆動アセンブリは、該ステップモーターに設置し、該リセット部を探知し、停止信号を発する感知部品を設置する。
該スイング棒は、該スイング部と連接し、該スイング部の連動を受け、該可動接続部を支点として回転するリセット部を備え、該駆動アセンブリは、該ステップモーターに設置し、該リセット部を探知し、停止信号を発する感知部品を設置する。
本発明のミシンの糸切り機構は、以下の効果を備える。本発明のミシンの糸切り機構は、ステップモーターを通して、押し棒をダイレクトに駆動し、往復移動を行わせ、スイング棒を連動し、糸フックカッターと糸切りカッターを連動して糸切りを行わせる。すなわち、ステップモーターと糸切りアセンブリとの間は、押し棒とスイング棒との連動だけを用いるため、2個以上の連棒が連動する複雑な伝動構造である一般のミシンの糸切り装置に比べ、本発明の連動方式は非常に簡潔、直接的で、数個の連棒により伝動するため、伝動に必要な電力を減らすこともでき、また連棒間の伝動誤差を大幅に低下させることもできる。さらに、ステップモーターの制御を通して、回転盤の回転速度と角度を制御し、ダイレクトドライブ方式で、糸切りアセンブリの糸切り速度を直接的にコントロールできるため、カムの回転速度を制御することで、糸切りをコントロールする間接的駆動構造である従来の糸切り機構に比べ、糸切りをより正確にコントロールすることができる。
以下に本発明の技術内容、構造特徴、達成する目的及び作用効果について、以下に例を挙げ並びに図面を組み合わせて詳細に説明する。
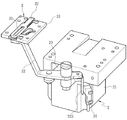
本発明の一実施例のミシン構造の分解模式図、外観模式図、構造分解模式図、上視図である図1〜4に示すように、本発明のミシンの糸切り機構は、ジグザグミシン10上に設置する。
ジグザグミシン10は、端始末、ショルダーベルトのミシン縫い、一般のZ字型ミシ縫いに用い、ミシンプラットホーム11を備える。ミシンの糸切り機構は、駆動アセンブリ2、駆動アセンブリ2の駆動を受けて糸切りを行う糸切りアセンブリ3を備える。
駆動アセンブリ2は、ステップモーター21、ステップモーター21に可動状に接続するスイング棒22、ステップモーター21とスイング棒22に連接し、ステップモーター21の駆動を受けて往復移動を行う押し棒23を備える。スイング棒22は、ステップモーター21と可動状に接続する可動接続部221、押し棒23と連接し、押し棒23の連動を受けて、可動接続部221を支点として回転するスイング部222を備える。
糸切りアセンブリ3は、ミシンプラットホーム11上に設置し、糸切りアセンブリ3は、スイング部222と連接し、スイング部222の連動を受けて往復移動を行い、ミシン糸4を引っ掛けて戻し(図5A参照)、糸フックルートRを備える糸フックカッター31、糸フックルートR上に設置し、糸フックカッター31において、ミシン糸4を引っ掛けて戻す時にミシン糸4を切断する糸切りカッター32を備える。
ジグザグミシン10は、端始末、ショルダーベルトのミシン縫い、一般のZ字型ミシ縫いに用い、ミシンプラットホーム11を備える。ミシンの糸切り機構は、駆動アセンブリ2、駆動アセンブリ2の駆動を受けて糸切りを行う糸切りアセンブリ3を備える。
駆動アセンブリ2は、ステップモーター21、ステップモーター21に可動状に接続するスイング棒22、ステップモーター21とスイング棒22に連接し、ステップモーター21の駆動を受けて往復移動を行う押し棒23を備える。スイング棒22は、ステップモーター21と可動状に接続する可動接続部221、押し棒23と連接し、押し棒23の連動を受けて、可動接続部221を支点として回転するスイング部222を備える。
糸切りアセンブリ3は、ミシンプラットホーム11上に設置し、糸切りアセンブリ3は、スイング部222と連接し、スイング部222の連動を受けて往復移動を行い、ミシン糸4を引っ掛けて戻し(図5A参照)、糸フックルートRを備える糸フックカッター31、糸フックルートR上に設置し、糸フックカッター31において、ミシン糸4を引っ掛けて戻す時にミシン糸4を切断する糸切りカッター32を備える。
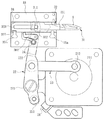
具体的には、ステップモーター21は、回転盤211、回転盤211上に設置し、押し棒23と可動状に接続し、回転盤211が回転する時に、押し棒23を連動し、往復移動を行わせる連動部212を備える。
糸切りアセンブリ3は、ミシンプラットホーム11上に設置するキャリア部33、糸フックルートRに沿って、キャリア部33上に開設するスライド槽34を備える。こうして、糸切りカッター32と糸フックカッター31とは、スライド槽34内において、糸フックルートRに沿って往復スライド移動を行う。糸切りアセンブリ3はさらに、スライド槽34両端に突出し、糸切りカッター32の移動を制限する2個の突出設置部35a、35bを備える。
糸切りカッター32は、糸フックカッター31上方に設置し、糸切りカッター32は、一端縁に設置するブレード部321、反対端縁に設置する接触部322、糸フックルートRに沿って、ブレード部321と接触部322との間に設置する開孔323を備える。糸フックカッター31は、開孔323を貫通する貫通設置部311、接触部322と同じ側に設置する押し接触部312、ブレード部321と同じ側に設置し、ミシン糸4を引っ掛けて戻す糸フック部313を備える。
糸切りアセンブリ3はさらに、糸切りカッター32片側に設置する可動位置限定部36を備える。可動位置限定部36は、弾力を提供する弾性部品361、弾力の駆動を受けて、回転を行う回転アーム362を備える。
糸切りアセンブリ3は、ミシンプラットホーム11上に設置するキャリア部33、糸フックルートRに沿って、キャリア部33上に開設するスライド槽34を備える。こうして、糸切りカッター32と糸フックカッター31とは、スライド槽34内において、糸フックルートRに沿って往復スライド移動を行う。糸切りアセンブリ3はさらに、スライド槽34両端に突出し、糸切りカッター32の移動を制限する2個の突出設置部35a、35bを備える。
糸切りカッター32は、糸フックカッター31上方に設置し、糸切りカッター32は、一端縁に設置するブレード部321、反対端縁に設置する接触部322、糸フックルートRに沿って、ブレード部321と接触部322との間に設置する開孔323を備える。糸フックカッター31は、開孔323を貫通する貫通設置部311、接触部322と同じ側に設置する押し接触部312、ブレード部321と同じ側に設置し、ミシン糸4を引っ掛けて戻す糸フック部313を備える。
糸切りアセンブリ3はさらに、糸切りカッター32片側に設置する可動位置限定部36を備える。可動位置限定部36は、弾力を提供する弾性部品361、弾力の駆動を受けて、回転を行う回転アーム362を備える。
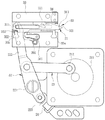
本発明の作動方式は、図5A〜5Dに示す。初期状態では、糸切りカッター32と糸フックカッター31は、スライド槽34内に収容されており、回転アーム362は、糸切りカッター32と糸フックカッター31の片側に接触している。ステップモーター21に通電し、回転盤211が時計回りの回転を行うと、連動部212は回転し、押し棒23を引いて動かし、押し棒23はさらに、スイング棒22を引いて動かす。この時、糸フックカッター31は、スイング棒22の連動を受け、スライド槽34に沿って移動する。続いて、糸フックカッター31の貫通設置部311は、糸切りカッター32の開孔323の孔壁に接触する。こうして、糸切りカッター32を連動し、スライド槽34に沿って移動させ、突出設置部35aに到達後、停止する。
糸切りカッター32が、突出設置部35aに到達して停止すると、糸フックカッター31は同時に停止し、定位される。この時、糸フック部313は、ミシン糸4を引っ掛ける。この後、ステップモーター21は、回転盤211を駆動し、逆時計回りに回転させ、押し棒23を連動して外へと移動させる。こうして、スイング棒22のスイング222を連動し、回転移動を行わせ、糸フックカッター31は、スイング棒22の連動を受け、後方へと移動し、ミシン糸4を引っ掛けて戻す。この時、ミシン糸4は、糸フックカッター31と糸切りカッター32との間に挟まれる。続いて、ステップモーター21の回転盤211は、第二段逆時計回り回転を行い、糸フックカッター31はさらに、後方へとひき動かされる。この時、糸切りカッター32のブレード部321は、ミシン糸4を切断し、二段式の糸切りを完成させる。
糸フックカッター31が後方へと移動を続けると、押し接触部312は、回転アーム362を押して開く。同時に、貫通設置部311は、糸切りカッター32の開孔323の孔壁に接触し、糸切りカッター32を連動し、後方へと移動させる。最後に、糸切りカッター32の接触部322は、もう一つの突出設置部35bに接触し、移動を停止し、糸切り作動全体を完成する。
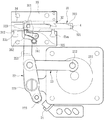
本発明のスイング棒22は、スイング部222と連接し、スイング部222の連動を受け、可動接続部221を支点として回転するリセット部223を備える。駆動アセンブリ2は、ステップモーター21に設置し、リセット部223を探知し、停止信号を発する感知部品24を設置する。
初期状態では、リセット部223は、感知部品24前方に位置し、しかも感知部品24は、リセット部223を探知し、起点位置を定義する。ステップモーター21がスイング部222の回転を駆動すると、リセット部223は同時に、スイング部222の連動を受け、可動接続部221により、回転を行い、起点位置から離れる。その後、ステップモーター21は、回転盤211を逆方向に回転させ、糸切りアセンブリ3に糸切りを行わせる。リセット部223が起点位置まで反対向きに回転すると、感知部品24は、リセット部223を探知し、停止信号を発する。停止信号は、ステップモーター21まで伝達され、ステップモーター21を停止させる。これにより、駆動アセンブリ2と糸切りアセンブリ3は、起点に戻り、リセットの効果を達成する。
初期状態では、リセット部223は、感知部品24前方に位置し、しかも感知部品24は、リセット部223を探知し、起点位置を定義する。ステップモーター21がスイング部222の回転を駆動すると、リセット部223は同時に、スイング部222の連動を受け、可動接続部221により、回転を行い、起点位置から離れる。その後、ステップモーター21は、回転盤211を逆方向に回転させ、糸切りアセンブリ3に糸切りを行わせる。リセット部223が起点位置まで反対向きに回転すると、感知部品24は、リセット部223を探知し、停止信号を発する。停止信号は、ステップモーター21まで伝達され、ステップモーター21を停止させる。これにより、駆動アセンブリ2と糸切りアセンブリ3は、起点に戻り、リセットの効果を達成する。
図1、3に示すように、糸切りアセンブリ3は、キャリア部33上を覆い、糸切りカッター32の垂直位置を制限する蓋板37、スライド槽34端口に設置し、糸フックカッター31を押上げ、糸フックカッター31と糸切りカッター32とを密着させる押上げ部38を備える。蓋板37と押上げ部38は上下に合わさり、糸フックカッター31と糸切りカッター32との間の空隙を減少させる。これにより、糸フックカッター31がミシン糸4を引っ掛けて戻す時、ミシン糸4を迅速かつ力強く切断することができる。
上記したように、本発明はステップモーター21を通して、押し棒23をダイレクトに駆動し、往復移動を行わせ、スイング棒22を連動し、糸フックカッター31と糸切りカッター32を連動して糸切りを行わせる。ステップモーター21を通して、回転盤211の回転速度を制御し、糸切りアセンブリ3の糸切り速度をコントロールする。ステップモーター21と糸切りアセンブリ3との間は、押し棒23とスイング棒22との連動だけを用いるため、2個以上の連棒が連動する複雑な伝動構造である一般のミシンの糸切り装置に比べ、本発明の連動方式は非常に簡潔、直接的で、数個の連棒により伝動するため、伝動に必要な電力を減らすこともでき、また連棒間の伝動誤差を大幅に低下させることもできる。こうして、糸切りアセンブリの糸切りをより正確に制御可能となる。
10 ジグザグミシン
11 ミシンプラットホーム
2 駆動アセンブリ
21 ステップモーター
211 回転盤
212 連動部
22 スイング棒
223 リセット部
23 押し棒
24 感知部品
3 糸切りアセンブリ
31 糸フックカッター
311 貫通設置部
312 押し接触部
313 糸フック部
32 糸切りカッター
321 ブレード部
322 接触部
323 開孔
33 キャリア部
34 スライド槽
35a、35b 突出設置部
36 可動位置限定部
361 弾性部品
362 回転アーム
37 蓋板
38 押上げ部
4 ミシン糸
R 糸フックルート
11 ミシンプラットホーム
2 駆動アセンブリ
21 ステップモーター
211 回転盤
212 連動部
22 スイング棒
223 リセット部
23 押し棒
24 感知部品
3 糸切りアセンブリ
31 糸フックカッター
311 貫通設置部
312 押し接触部
313 糸フック部
32 糸切りカッター
321 ブレード部
322 接触部
323 開孔
33 キャリア部
34 スライド槽
35a、35b 突出設置部
36 可動位置限定部
361 弾性部品
362 回転アーム
37 蓋板
38 押上げ部
4 ミシン糸
R 糸フックルート
Claims (8)
- ミシンの糸切り機構は、ミシン上に設置し、
前記ミシンは、ミシンプラットホームを備え、
前記ミシンの糸切り機構は、駆動アセンブリ、糸切りアセンブリを備え、
前記駆動アセンブリは、ステップモーター、前記ステップモーターに可動状に接続するスイング棒、前記ステップモーターと前記スイング棒に連接し、前記ステップモーターの駆動を受けて往復移動を行う押し棒を備え、前記スイング棒は、前記ステップモーターと可動状に接続する可動接続部、前記押し棒と連接し、前記押し棒の連動を受けて、前記可動接続部を支点として回転するスイング部を備え、
前記糸切りアセンブリは、前記ミシンプラットホーム上に設置し、前記スイング部と連接し、前記スイング部の連動を受けて往復移動を行い、ミシン糸を引っ掛けて戻し、糸フックルートを備える糸フックカッター、前記糸フックルート上に設置し、前記糸フックカッターにおいて、ミシン糸を引っ掛けて戻す時にミシン糸を切断する糸切りカッターを備えることを特徴とするミシンの糸切り機構。 - 前記糸切りアセンブリは、前記ミシンプラットホーム上に設置するキャリア部、前記糸フックルートに沿って、前記キャリア部上に開設し、前記糸切りカッターと前記糸フックカッターとに、往復スライド移動を行わせるスライド槽を備えることを特徴とする請求項1に記載のミシンの糸切り機構。
- 前記糸切りアセンブリはさらに、前記スライド槽両端に突出し、前記糸切りカッターの移動を制限する2個の突出設置部を備えることを特徴とする請求項2に記載のミシンの糸切り機構。
- 前記糸切りアセンブリは、前記キャリア部上を覆い、前記糸切りカッターの垂直位置を制限する蓋板、前記スライド槽端口に設置し、前記糸フックカッターを押上げ、前記糸フックカッターと前記糸切りカッターとを密着させる押上げ部を備えることを特徴とする請求項2に記載のミシンの糸切り機構。
- 前記糸切りカッターは、一端縁に設置するブレード部、前記糸フックルートに沿って設置する開孔を備え、
前記糸フックカッターは、前記開孔を貫通し、移動時に、前記開孔の孔壁に接触して、前記糸切りカッターの移動を連動する貫通設置部、前記ブレード部と同じ側に設置し、ミシン糸を引っ掛けて戻す糸フック部を備えることを特徴とする請求項1に記載のミシンの糸切り機構。 - 前記糸切りカッターは、反対端縁に設置する接触部を備え、
前記糸フックカッターは、前記接触部と同じ側に設置する押し接触部を備え、
前記糸切りアセンブリはさらに、前記糸切りカッター片側に設置する可動位置限定部を備え、
前記可動位置限定部は、弾力を提供する弾性部品、弾力の駆動を受けて、回転を行い、前記糸フックカッターがミシン糸の方へと移動すると、前記接触部と接触し、前記糸切りカッターの移動を制限し、前記糸フックカッターがミシン糸を引っ掛けて戻す時、前記押し接触部の押される回転アームを備えることを特徴とする請求項5に記載のミシンの糸切り機構。 - 前記ステップモーターは、回転盤、前記回転盤上に設置し、前記押し棒と可動状に接続し、前記回転盤が回転する時に、前記押し棒を連動し、往復移動を行わせる連動部を備えることを特徴とする請求項1に記載のミシンの糸切り機構。
- 前記スイング棒は、前記スイング部と連接し、前記スイング部の連動を受け、前記可動接続部を支点として回転するリセット部を備え、
前記駆動アセンブリは、前記ステップモーターに設置し、前記リセット部を探知し、停止信号を発する感知部品を設置することを特徴とする請求項1に記載のミシンの糸切り機構。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013212065A JP2015073741A (ja) | 2013-10-09 | 2013-10-09 | ミシンの糸切り機構 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013212065A JP2015073741A (ja) | 2013-10-09 | 2013-10-09 | ミシンの糸切り機構 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015005445U Continuation JP3201992U (ja) | 2015-10-27 | 2015-10-27 | ミシンの糸切り機構 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015073741A true JP2015073741A (ja) | 2015-04-20 |
Family
ID=52999068
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013212065A Pending JP2015073741A (ja) | 2013-10-09 | 2013-10-09 | ミシンの糸切り機構 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015073741A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109457411A (zh) * | 2019-01-02 | 2019-03-12 | 浙江大森缝纫机有限公司 | 一种缝纫机及其自动剪线与抬压脚机构 |
| CN111197203A (zh) * | 2020-03-19 | 2020-05-26 | 杰克缝纫机股份有限公司 | 一种抬牙剪线组件和具有该抬牙剪线组件的缝纫机 |
| CN111304841A (zh) * | 2018-12-12 | 2020-06-19 | 苏州日和缝制设备有限公司 | 一种短线头电控剪线机构 |
| CN111850858A (zh) * | 2020-07-16 | 2020-10-30 | 台州市速普机电有限公司 | 一种剪线及抬压脚机构及平缝机 |
| CN113388967A (zh) * | 2021-07-21 | 2021-09-14 | 浙江龙泰缝纫设备有限公司 | 一种剪线结构以及自动剪线和抬压脚一体的曲折缝纫机 |
| CN113897741A (zh) * | 2021-11-12 | 2022-01-07 | 苏州日和缝制设备有限公司 | 一种缝纫机剪线机构及缝纫机 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5071147U (ja) * | 1974-07-22 | 1975-06-23 | ||
| JP2005278928A (ja) * | 2004-03-30 | 2005-10-13 | Brother Ind Ltd | ミシンの上糸挟持機構 |
| JP2006314514A (ja) * | 2005-05-12 | 2006-11-24 | Juki Corp | 糸切り装置 |
| JP2007159973A (ja) * | 2005-12-16 | 2007-06-28 | Juki Corp | ミシンの糸切り装置 |
-
2013
- 2013-10-09 JP JP2013212065A patent/JP2015073741A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5071147U (ja) * | 1974-07-22 | 1975-06-23 | ||
| JP2005278928A (ja) * | 2004-03-30 | 2005-10-13 | Brother Ind Ltd | ミシンの上糸挟持機構 |
| JP2006314514A (ja) * | 2005-05-12 | 2006-11-24 | Juki Corp | 糸切り装置 |
| JP2007159973A (ja) * | 2005-12-16 | 2007-06-28 | Juki Corp | ミシンの糸切り装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111304841A (zh) * | 2018-12-12 | 2020-06-19 | 苏州日和缝制设备有限公司 | 一种短线头电控剪线机构 |
| CN109457411A (zh) * | 2019-01-02 | 2019-03-12 | 浙江大森缝纫机有限公司 | 一种缝纫机及其自动剪线与抬压脚机构 |
| CN109457411B (zh) * | 2019-01-02 | 2023-12-05 | 浙江大森缝纫机有限公司 | 一种缝纫机及其自动剪线与抬压脚机构 |
| CN111197203A (zh) * | 2020-03-19 | 2020-05-26 | 杰克缝纫机股份有限公司 | 一种抬牙剪线组件和具有该抬牙剪线组件的缝纫机 |
| CN111197203B (zh) * | 2020-03-19 | 2021-07-30 | 杰克缝纫机股份有限公司 | 一种抬牙剪线组件和具有该抬牙剪线组件的缝纫机 |
| CN111850858A (zh) * | 2020-07-16 | 2020-10-30 | 台州市速普机电有限公司 | 一种剪线及抬压脚机构及平缝机 |
| CN113388967A (zh) * | 2021-07-21 | 2021-09-14 | 浙江龙泰缝纫设备有限公司 | 一种剪线结构以及自动剪线和抬压脚一体的曲折缝纫机 |
| CN113897741A (zh) * | 2021-11-12 | 2022-01-07 | 苏州日和缝制设备有限公司 | 一种缝纫机剪线机构及缝纫机 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2015073741A (ja) | ミシンの糸切り機構 | |
| CN109722798B (zh) | 一种缝纫机的剪线抬压脚机构 | |
| WO2014131211A1 (zh) | 适用于全自动炒菜机的锅盖控制装置 | |
| CN205094529U (zh) | 直线切割吻合器的防二次击发保险机构 | |
| EP4086019A1 (en) | Truss footing cutting device | |
| US8955446B1 (en) | Thread cutting mechanism for sewing machine | |
| CN103011040A (zh) | 真空采血容器器盖自动开启装置 | |
| JP6001341B2 (ja) | オーバーロックミシン | |
| JP3201992U (ja) | ミシンの糸切り機構 | |
| CN202106099U (zh) | 一种锯切机 | |
| CN108754913B (zh) | 一种圈绒剪绒一体式植绒机 | |
| CN209947680U (zh) | 可储能快速分闸的负荷开关 | |
| CN206173711U (zh) | 剪刀装置 | |
| CN103612271B (zh) | 切割式裁纸刀 | |
| CN103469502B (zh) | 缝纫机自动切线装置 | |
| CN202665324U (zh) | 具有双重安全开关结构的食物处理器 | |
| CN206438277U (zh) | 旋转剪线装置及缝纫机 | |
| CN104233614B (zh) | 一种圆编机调线变色头 | |
| CN108724271B (zh) | 一种切割间距可调节的步进式牛肉切割机 | |
| TWI548792B (zh) | Sewing machine tangent mechanism | |
| WO2021121268A1 (zh) | 用于冰淇淋机的下压装置 | |
| CN203900593U (zh) | 一种全自动导轨切割器 | |
| CN110130012B (zh) | 缝纫机剪线装置 | |
| CN202549640U (zh) | 一种电动割草机的开关控制系统 | |
| CN202347263U (zh) | 圆头锁眼机的剪线机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150316 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20150316 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20150317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150806 |