JP2014507108A - 電気的制御システムを較正するためのシステム - Google Patents
電気的制御システムを較正するためのシステム Download PDFInfo
- Publication number
- JP2014507108A JP2014507108A JP2013556627A JP2013556627A JP2014507108A JP 2014507108 A JP2014507108 A JP 2014507108A JP 2013556627 A JP2013556627 A JP 2013556627A JP 2013556627 A JP2013556627 A JP 2013556627A JP 2014507108 A JP2014507108 A JP 2014507108A
- Authority
- JP
- Japan
- Prior art keywords
- current
- motor
- phase
- delay
- command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/20—Arrangements for starting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/16—Estimation of constants, e.g. the rotor time constant
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/36—Arrangements for braking or slowing; Four quadrant control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
一方法が、電流信号のセットから電流値をラッチするために電流検知時点を較正する(図4の402)。あるシャフト速度において動力モードでモータが動作しているとき、あるガンマ角である大きさを含む電流コマンドが、モータを制御するために与えられる(404)。同じシャフト速度において制動モードでモータが動作しているとき、同じガンマ角で同じ大きさを含む電流整合コマンドが、モータを制御するために与えられる(408)。モータが電流コマンドによって制御され、動力モードで動作しているとき、モータの3相電流の第1の実際の平均化rms電流の大きさが監視される(406)。モータが、電流整合コマンドによって制御され、制動モードで動作しているとき、モータの3相電流の第2の実際の平均化rms電流の大きさが監視される(410)。
Description
[0001]本明細書は、一般に、電気的制御システムを較正するためのシステムおよび方法に関し、このシステムおよび方法を全体的にシステムと呼ぶ。
[0002]埋込永久磁石型(IPM:interior permanent magnet)モータ、IPM同期機械(IPMSM:synchronous IPM machine)、従来の誘導機械、表面実装型PM機械(SMPM:surface mounted PM machine)、その他の交流機、またはその他の種々の機械のような交流機などのモータは、種々の方法で制御および/または給電することができる。たとえば、モータは、電池、電気、化石燃料、モータ、供給電圧、またはその他の供給源を使用して給電することができる。モータは、手動で、および/またはコンピュータプロセッサの助けを借りて制御することができる。
[0003]ある方法は、電流信号のセットから電流値をラッチする電流検知時点(current sensing instant)を較正する。
あるシャフト速度において動力モード(motoring mode)でモータが動作しているとき、あるガンマ角での大きさを含む電流コマンドが、モータを制御するように与えられる。同じシャフト速度において制動モードでモータが動作しているとき、同じガンマ角での同じ大きさを含む電流整合コマンドが、モータを制御するために与えられる。モータが電流コマンドによって制御され、動力モードで動作しているとき、モータの3相電流の第1の実際の平均化rms電流の大きさが監視される。モータが、電流整合コマンドによって制御され、制動モードで動作しているとき、モータの3相電流の第2の実際の平均化rms電流の大きさが監視される。電流検知時点は、動力モードで観測される第1の実際の平均化rms電流の大きさが、制動モードで観測される第2の実際の平均化rms電流の大きさに等しくなるまで調整される。 [0004]他のシステム、方法、特徴、および利点は、以下の図および詳細な説明を検討することによって、当業者に明らかであるか、または明らかとなるであろう。このような追加のシステム、方法、特徴、および利点は本明細書に含められ、実施形態の範囲に含められ、添付の特許請求の範囲によって保護され、添付の特許請求の範囲によって定義されることが意図されている。さらなる態様および利点について、説明と併せて以下で論じる。
[0005]以下の図面および説明を参照することにより、システムおよび/または方法をより一層理解することができる。以下の図面を参照して、非限定的および非網羅的な説明を記載する。図の構成要素は必ずしも一定の縮尺に従っておらず、その代わりに、原理を図示することに重点が置かれている。図では、同じ参照符号は、特に記載のない限り、異なる図においても同じ部品を指すことができる。
[0014]モータの付いた多くのシステムでは、モータの動作の正確な制御が望ましいことがあり、いくつかの状況では、これが必要である。モータの正確な制御および動作には、モータの性質の理解ならびに重要な処理性能の理解が必要な場合がある。
[0015]図1は、モータ117などの1つまたは複数のモータを制御するために使用できる制御システムを示す。この制御システムは、電子データ処理システム120、インバータスイッチング回路188、センサ115、および/または車両データバス118のうちの1つまたは複数を含むことができる。これより多いまたは少ない構成要素または特徴部を含んでもよい。制御システムは、電子データ処理システム120、インバータスイッチング回路188、およびセンサ115の組合せを指すことがある。いくつかのシステムでは、制御システムは、車両データバス118を含むことができる。他のシステムでは、制御システムは、電子データ処理システム120および/またはインバータスイッチング回路188のみを指すことがある。図1に示されるモータ117および/またはメカニカルシャフト126は、制御システムの一部であると考えてもよいし、そう考えなくてもよい。いくつかの実施形態では、図1の制御システムは、モータ117は別にして、インバータまたはモータコントローラと呼ぶこともできる。
[0016]制御システムは、たとえばモータ117などの1つまたは複数のモータを制御するために実施および/または使用することができる。モータ117は、埋込永久磁石型(IPM)モータ、IPM同期機械(IPMSM)、従来の誘導機械、表面実装型PM機械(SMPM)、他の交流機、または種々の他の機械のような交流機などの種々の機械またはモータを指すことがある。いくつかの実施形態では、IPMSMは、従来の誘導機械または表面実装型PM機械(SMPM)と比較すると、たとえば、高い効率性、高い電力密度、広い一定の電力動作領域、および保守削減などの好ましい利点を有することができる。説明を簡単にするため、制御される機械をモータ117と呼ぶことがあるが、本開示はモータに限定されないことを理解されたい。
[0017]モータ117は、種々の方法で機能および/または動作することができる。たとえば、モータ117は、電源によって給電および/または制御することができる。電源は、たとえば、電池、電気、バス電圧(直流バス電圧など)、および/または他の電力供給、電圧供給、もしくは電流供給などの電圧源(すなわちソース電圧)または電圧供給(すなわち供給電圧)とすることができる。
[0018]モータ117は、制御信号を必要とし、これを受け取り、これによって給電され、および/またはこれに基づいて動作することができる。この制御信号は、たとえば、3相電流コマンドおよび/または3相電圧コマンドなどの電流コマンドおよび/または電圧コマンドとすることができる。制御信号は、モータ117に物理的に給電することができ、および/または機械にどのように動作するべきかを命令することができる。制御信号は、電力を含み、および/または電力を電源からモータに配電することができる。
[0019]制御信号は、たとえば、インバータスイッチング回路188、パルス幅変調生成器などの生成モジュール112、または他の特徴部もしくは構成要素によってモータ117に送信されることができる。モータ117を動作および/または給電する他の方法も可能とすることができる。
[0020]モータ117は、種々のモードで動作可能および/または機能することができる。たとえば、モータ117は、動力モードで動作可能および/または機能することができる。動力モードは、モータ117がメカニカルシャフト126などの付属のメカニカルシャフトまたは他のデバイスを、ある方向に、ある速度で、ある加速度で、および/またはある電力で駆動するモードを指すことがある。たとえば、動力モードは、車両などの大型機械に取り付けられたモータ117が、その大型機械を第1の方向に駆動、給電、推進、および/または加速させるモードを指すことがある。動力モードは、モータ117が電力を消費している、および/またはこれを電源から受け取っているモードを指すことがある。
[0021]動力モードは、ユーザからのコマンドなどのコマンドによって開始することができる。たとえば、ユーザは、制御システムおよび/またはモータに、ユーザインタフェースを通して、モータに給電するように命令することができる。ユーザインタフェースの一例は、図2に示されるコントローラ266であり、以下で説明することができる。制御システムは、命令を処理し、モータを駆動する信号および/またはコマンドを生じることができる。
[0022]モータ117は、制動モードすなわち発電モードで動作することもできる。制動モードすなわち発電モードは、モータ117が機械を駆動していない、および/またはこれに給電していないモードを指すことがある。たとえば、制動モードは、モータ117が運転中であり、かつ電力信号および/または電力コマンドがモータ117に送信されない場合に存在する、またはこうした場合を指すことがある。制動モードすなわち発電モードでは、モータ117は、電荷を生成する、ならびに/または電力および/もしくは電圧を電源に供給することができる。たとえば、アイドリングすることがある回転中のモータは、その回転から信号および/または電荷を生成することができ、その信号および/または電荷を、dcバス電圧源などの、モータおよび/または制御システムの電力源に伝達することができる。制動モードは、モータが電力源に電力を供給している動作のモードを指すことがある。いくつかのシステムでは、制動モードは、モータ117および/またはメカニカルシャフト126が動力モードと反対方向に回転するモータ117の動作を指すことがある。
[0023]いくつかの実施形態では、動力モードと制動モードの違いは、動力モードは、モータ117が電源からの電力を消費している期間を指し、制動モード(すなわち発電モード)は、モータ117が電源に電力をフィードバックする期間を指すことがあることである。モータ117を動作させるその他のモードも可能である。
[0024]図1で説明し、示されるように、モータ117は、インバータスイッチング回路188に接続、結合、および/または連通することができる。
[0025]インバータスイッチング回路188は、生成モジュール112からなど、電子データ処理システム120からコマンド信号を受け取ることができる。たとえば、生成モジュール112は、インバータ回路188内部にあるドライバ段に入力を提供することができる。このようなコマンド信号は、生成モジュール112によって生成される、および/またはこれによってインバータスイッチング回路188に送られて処理され、モータ117に送信されて、モータ117を制御および/または駆動することができる。いくつかのシステムでは、このようなコマンドを電圧コマンド、すなわち3相電圧コマンドと呼ぶことがある。
[0025]インバータスイッチング回路188は、生成モジュール112からなど、電子データ処理システム120からコマンド信号を受け取ることができる。たとえば、生成モジュール112は、インバータ回路188内部にあるドライバ段に入力を提供することができる。このようなコマンド信号は、生成モジュール112によって生成される、および/またはこれによってインバータスイッチング回路188に送られて処理され、モータ117に送信されて、モータ117を制御および/または駆動することができる。いくつかのシステムでは、このようなコマンドを電圧コマンド、すなわち3相電圧コマンドと呼ぶことがある。
[0026]インバータスイッチング回路188は、電源によって給電することができる。いくつかの構成では、インバータスイッチング回路188および/またはインバータスイッチング回路188への電源は、モータ117の電源と見なすことができる。いくつかの構成では、電源は、直流(DC)電圧バスとすることができる。あるいは、電源は、電池、電気、別のバス電圧、および/または他の電力供給、電圧供給、もしくは電流供給などの電圧源(すなわちソース電圧)または電圧供給(すなわち供給電圧)とすることができる。他の電源および構成も可能である。
[0027]インバータスイッチング回路188は、スイッチング半導体などのパワーエレクトロニクスを含むことができる。このパワーエレクトロニクスは、パルス、方形波、正弦波、または他の波形などのパルス幅変調信号または他の交流信号を生成、変更、および/または制御するために機能および/または使用することができる。インバータスイッチング回路188は、生成および/または変更された制御信号をモータ117に出力するためにスイッチング半導体(たとえば、絶縁ゲートバイポーラトランジスタ(IGBT)または他のパワートランジスタを駆動または制御する半導体駆動回路を含むことができる。
[0028]前述したように、インバータスイッチング回路188は、生成モジュール112から電圧コマンドまたは他のコマンド信号を受け取ることができる。インバータスイッチング回路188は、受け取ったコマンド信号に基づく電圧信号もしくはコマンド、電流信号もしくはコマンド、および/または電力信号もしくはコマンドをモータ117に提供することができる。たとえば、インバータスイッチング回路188は、コマンドおよび/またはコマンド信号を生成モジュール112から受け取ることができ、インバータスイッチング回路188に供給されたおよび/またはこれに与えられた供給電圧を電圧コマンドおよび/または電圧信号に変換することができ、ならびに電圧コマンドおよび/または電圧信号をモータ117に送るまたは別の方法で送信することができる。インバータスイッチング回路188によって生成されるコマンドおよび/または信号は、電圧コマンド、端子電圧コマンド、もしくはdq軸電圧コマンドとすることができ、および/または電圧コマンド、端子電圧コマンド、もしくはdq軸電圧コマンドと呼ぶことがある。
[0029]インバータスイッチング回路188によってモータ117に提供される制御信号またはコマンドは、モータ117を制御および/または駆動することができる。たとえば、インバータスイッチング回路188の出力段、ポート、または伝動装置(transmission)は、モータの制御のために、パルス幅変調電圧波形または他の電圧信号を提供するおよび/または送ることができる。インバータスイッチング回路188によってモータ117に提供される制御信号および/またはコマンドは、インバータスイッチング回路188によって生成モジュール112から受け取られたコマンド信号に基づく、および/またはこれに関連してもよいし、そうでなくてもよい。
[0030]モータ117は、メカニカルシャフト126に取り付ける、接続する、および/または連通することができる。メカニカルシャフト126は、モータ117が運転中のときメカニカルシャフト126が回転するかまたは別の方法で変位できるように、構成するおよび/またはモータ117に取り付けることができる。一例として、モータ117は、メカニカルシャフト126の回転を駆動することができる。このようにして、車輪などのメカニカルシャフトの端部に取り付けられた物体を、モータ117によって回転させることができる。メカニカルシャフト126は、モータシャフトであってもよいし、種々の他のシャフトであってもよい。
[0031]メカニカルシャフト126は、種々の形状、サイズ、および/または寸法であってもよく、種々の材料から作製することができる。たとえば、メカニカルシャフト126は、車両モータに取り付けられる車両内のシャフトなどのモータ117と共に使用するように構成するおよび/またはモータ117と共に使用することが可能な任意のメカニカルシャフトであってもよい。他のメカニカルシャフトも可能とすることができる。
[0032]モータ117はまた、センサ115と結び付けることができる。センサ115は、位置センサ、ブラシレスレゾルバ、別のレゾルバ、エンコーダの位置センサ、速度センサ、シャフトもしくはロータの速度検出器、デジタル位置エンコーダ、直流モータ、光学エンコーダ、Hall効果センサなどの磁界センサ、磁気抵抗センサ、またはセンサ、エンコーダ、もしくはエンコーダの種々の組合せであってもよく、および/またはこれらを含んでもよい。センサの出力は、アナログ信号、デジタル信号、または両方を含むことができる。他のセンサも可能とすることができる。
[0033]センサ115は、メカニカルシャフト126および/またはモータ117に接続する、取り付ける、および/または連通することができる。たとえば、センサ115は、メカニカルシャフト126上に取り付けてもよいし、これと一体化させてもよい。これは、メカニカルシャフトの回転または変位がモータ117の1つまたは複数の性質と容易にかつ/または直接的に相関することが可能なシステムで有用な場合がある。あるいは、センサ115は、モータおよび/またはモータに取り付けもしくは連通する他の構成要素に直接的に接続することができる。さらに、いくつかのシステムでは、複数のセンサ115を使用することができる。たとえば、3相モータの相ごとに1つのセンサ115を使用してデータを検知することができる。種々の構成が可能である。
[0034]センサ115は、モータ117および/またはメカニカルシャフト126の1つまたは複数の性質を監視、測定、および/または推定するために使用することができる。センサ115がメカニカルシャフトに接続されるかまたは取り付けられる場合、センサ115は、たとえば、メカニカルシャフト126の角度位置、メカニカルシャフト126の速度もしくは速力、および/またはメカニカルシャフト126の回転の方向などのメカニカルシャフト126の性質を監視、測定、および/または推定することができる。あるいは、センサ115は、たとえば、モータ117の角度位置、モータ117の速度もしくは速力、および/またはモータ117の回転の方向などのモータ117の1つまたは複数の性質を直接的に測定することができる。
[0035]いくつかの構成では、位置データおよび関連する時間データを処理して、メカニカルシャフト126に関する速度データまたは速力データを決定する場合、センサ115は位置センサを含む。他の構成では、センサ115は、モータシャフトの位置を決定するために、速度センサ、または速度センサと積分器の組合せを含むことができる。他の構成では、センサ115は、モータシャフト126の速度を決定するために、モータ117のメカニカルシャフト126に機械的に結合された補助の小型直流生成器を含むことができる。これらの構成では、直流生成器は、モータシャフト126の回転速度に比例する出力電圧を生じることができる。他の構成では、センサ115は、光源を有する光学エンコーダを含むことができる。この光学エンコーダは、メカニカルシャフト126に結合された回転体に向けて信号を送り、反射または回折された信号を光検出器で受け取る。これらの構成では、受け取った信号のパルス(たとえば、方形波)の周波数は、メカニカルシャフト126の速度に比例することができる。他の構成では、センサ115は、第1の巻線と第2の巻線とを有するレゾルバを含むことができ、この第1の巻線には交流(AC)が与えられ、この第2の巻線で誘導される電圧は、ロータの回転の周波数と共に変化する。種々の他の構成が可能である。
[0036]センサ115は、メカニカルシャフト126および/またはモータ117への取り付けまたは接続から監視、測定、および/または推定された性質または信号に基づいて、信号を出力することができる。センサ115の出力は、ia、ib、icのような電流フィードバックデータなどのフィードバックデータ、生位置信号もしくは生速力信号などの生信号、または他のフィードバックデータもしくは生データを含むことができる。他の考えられうるフィードバックデータとしては、巻線温度の読取り値、インバータ回路188の半導体温度の読取り値、3相電圧データもしくは3相電流データ、またはモータ117に関する他の熱情報もしくは性能情報があるが、これらに限定されない。あるいは、またはこれに加えて、センサ115の出力は、処理された信号を含むことができる。センサ115の出力は、アナログ信号であってもよいし、デジタル信号であってもよい。
[0037]いくつかの実施形態では、センサ115は、アナログ/デジタル変換器(図示せず)に結合することができる。このアナログ/デジタル変換器は、アナログの位置データまたは速力データをそれぞれデジタルの位置データまたは速力データに変換することができる。このようなアナログ/デジタル変換器は、制御システムおよび/または電子データ処理システム120の内部にあってもよいし、外部にあってもよい。他の実施形態では、センサ115は、メカニカルシャフト126またはロータに関する位置データまたは速力データなどの位置データまたは速力データのデジタルデータ出力を提供することができる。
[0038]センサ115の出力は、電子データ処理システム120に送る、送信する、通過させる、および/または別の方法で通信することができる。いくつかのシステムでは、出力は、電子データ処理システム120の一次処理モジュール114に結合することができる。センサ115がアナログ/デジタル変換器(図示せず)に結合される実施形態では、アナログ/デジタル変換器の出力を一次処理モジュール114に送る、送信する、通過させる、および/または別の方法で通信することができる。
[0039]制御システムは、電子データ処理システム120を含むことができる。電子データ処理システム120は、図1では破線で示されており、図2においてさらに詳しく示されている。
[0040]電子データ処理システム120は、1つまたは複数のソフトウェアモジュールのソフトウェア命令の格納、処理、または実行をサポートするために使用することができる。電子データ処理システム120は、電子モジュール、ソフトウェアモジュール、ハードウェアモジュール、またはそれぞれの組合せを含むことができる。
[0041]電子データ処理システム120は、検知回路124、アナログ/デジタル変換器122、一次処理モジュール114、二次処理モジュール116、相変換器113、計算モジュール110、dq軸電流生成マネージャ109、加算器もしくは加算モジュール119、電流整形モジュール106、ロータ磁石温度推定モジュール104、端子電圧フィードバックモジュール108、電流調整モジュール107、トルクコマンド生成モジュール105、電流調節コントローラ111、および/または生成モジュール112などの1つまたは複数の要素、特徴部、および/または構成要素を含むことができる。また、またはあるいは、電子データ処理システムは、デジタル処理システムおよび/またはフィールドプログラマブルゲートアレイを含むことができる。電子データ処理システム120の構成要素のうちの1つまたは複数は、互いと組み合わせてもよいし、および/または他の構成要素間で分割してもよい。たとえば、いくつかのシステムでは、検知回路124およびアナログ/デジタル変換器122は、電子データ処理システム120の外部にあってもよい。電子データ処理システム120に含める構成要素は、これより多くてもよいし、少なくてもよい。いくつかの実施形態では、図1の電子データ処理システム120が複数の電子データ処理システムを表すことがあり、そのうちのいくつかまたはすべては互いと接続する、取り付ける、および/または連通することができる。
[0042]前述したように、センサ115の出力は、電子データ処理システム120に送信する、送る、および/または別の方法で通信することができる。たとえば、センサ115の出力を一次処理モジュール114に送信することができる。
[0043]一次処理モジュール114は、位置処理モジュールおよび/または速度処理モジュールとすることができ、センサ115からの出力を処理することができる。一次処理モジュール114は、モータ117に関する位置データ(θ)および/または速度データを処理、決定、計算、推定、および/または別の方法で識別することができる。いくつかのシステムでは、モータ117上のセンサ115は、モータシャフト126に位置データ(θ)を提供することができ、一次処理モジュール114は、センサ115からの位置データを速度データに変換することができる。
[0044]モータ117に関する位置データ(θ)は、メカニカルシャフト126の位置および/またはモータ117の位置を指すことができる。位置データ(θ)は、角度、オフセット角度、相、または種々の他の角度もしくは位置として表現するおよび/または表すことができる。速度データは、モータ117の速度を指すことができる。速度データは、メカニカルシャフト126の1分あたりの回転数として表現するおよび/もしくは表してもよいし、種々の他の速度として表現するおよび/もしくは表してもよい。位置データ(θ)および/または速度データは、センサ115から一次処理モジュール114によって受け取られる出力に基づいて、またはこの出力の結果として、一次処理モジュール114によって処理、決定、計算、推定、および/または別の方法で識別することができる。
[0045]一次処理モジュール114は、制御システムの1つまたは複数の構成要素に位置データ(θ)および/または速度データを出力することができる。たとえば、一次処理モジュール114は、位置データ(θ)を相変換器113に出力することができ、および/または速度データを計算モジュール110に出力することができる。あるいは、一次処理モジュール114は、モータ117に関する位置データ(θ)および/または速度データの一方または両方を制御システムの種々の他の構成要素に出力することができる。
[0046]前に説明したセンサ115に加えて、制御システムは、検知回路124も含むことができる。検知回路124は、モータ117に結合できる入力を有することができる。検知回路124の入力は、モータ117の性質を監視、測定、および/または推定するために使用するおよび/または動作可能にすることができる。たとえば、検知回路124の入力は、モータ117の端子に結合することができる。検知回路124の入力は、モータ117の測定した電流を検知するために使用することができる。たとえば、検知回路124は、モータ117の巻線に印加される電流、巻線に誘導される逆EMF、またはこれらの両方などの3相電流を測定するために、モータ117と結び付けることができる。また、またはあるいは、検知回路124は、モータ117の直流電圧レベルなどのモータ117の電圧レベルを測定するために使用することができる。あるいは、またはこれに加えて、検知回路124は、DC電力をインバータスイッチング回路188に供給する高電圧DCデータバスなどの、モータ117に給電するために使用されるおよび/またはインバータスイッチング回路188に給電するために使用される電圧供給レベルを測定するために使用することができる。他の構成も可能である。さらに、モータ117の他の性質を監視、測定、および/または推定することができる。
[0047]検知回路124は、図1において、電子データ処理システム120の一部であるように示されている。あるいは、検知回路124は、電子データ処理システム120とは別個の構成要素とすることができ、ならびに/または電子データ処理システム120に外付け、接続、および/もしくは連通することができる。
[0048]電子データ処理システム120において、検知回路124は、モータ117から検知された信号をアナログ/デジタル変換器122に送るおよび/または出力することができる。これらの信号は、たとえば、インバータスイッチング回路188に給電する直流(DC)データバス電圧などの、電源の測定した3相電流レベルおよび/または3電圧レベルを含むことができる。
[0049]アナログ/デジタル変換器122は、図1において、電子データ処理システム120の一部であるように示されている。あるいは、アナログ/デジタル変換器122は、電子データ処理システム120とは別個の構成要素とすることができ、ならびに/または電子データ処理システム120に外付けする、接続する、および/もしくは連通することができる。
[0050]アナログ/デジタル変換器122は、検知回路124の出力を受け取ることができる。アナログ/デジタル変換器122は、検知回路124からのアナログ出力をデジタル信号に変換および/またはデジタル化し、次に、このデジタル信号を電子データ処理システム120によってさらに処理することができる。
[0051]アナログ/デジタル変換器122は、二次処理モジュール116と取り付ける、接続する、結合する、および/または連通することができる。検知回路124からのデジタル化した出力などのアナログ/デジタル変換器122からの出力は、二次処理モジュール116に送ることができる。
[0052]いくつかのシステムでは、アナログ/デジタル変換器122は、必須でなくてもよく、含めなくてもよい。たとえば、検知回路124の出力がデジタル信号であるシステムでは、アナログ/デジタル変換器122は有用でないことがある。
[0053]二次処理モジュール116は、いくつかのシステムでは「直流(DC)バスおよび3相電流処理モジュール」と呼ぶことがあり、アナログ/デジタル変換器122から受け取った信号からの情報を処理、決定、計算、推定、または別の方法で識別することができる。たとえば、二次処理モジュール116は、検知回路124から受け取った信号から3相電流(ia,ib,ic)を決定または識別することができる。これらの3相電流(ia,ib,ic)は、モータ117によって生成される実際の3相電流を表すおよび/またはこれに関連することがある。あるいは、またはこれに加えて、二次処理モジュール116は、インバータスイッチング回路188に給電する直流(DC)データバス電圧を決定または識別することができる。
[0054]二次処理モジュール116は、1つまたは複数のデジタル信号プロセッサ、フィールドプログラマブルゲートアレイ、他のプロセッサ、および/または種々の他の構成要素を含むことができる。さらに、またはあるいは、二次処理モジュール116は、1つまたは複数のデジタル信号プロセッサ、フィールドプログラマブルゲートアレイ、他のプロセッサ、および/または種々の他の構成要素に含めることができる。
[0055]二次処理モジュール116は、制御システムおよび/または電子データ処理システム120の1つまたは複数の構成要素に3相電流(ia,ib,ic)および/または直流電圧を出力することができる。たとえば、二次処理モジュール116は、3相電流(ia,ib,ic)のそれぞれを相変換器113に出力することができ、直流電圧(VDC)を計算モジュール110に出力することができる。あるいは、二次処理モジュール116は、3相電流(ia,ib,ic)および/または直流電圧(VDC)の一方または両方を制御システムの種々の他の構成要素に出力することができる。
[0056]相変換器113は、いくつかのシステムでは3相/2相電流パーク変換モジュール(Park transformation module)と呼ぶことがあり、一次処理モジュール114および二次処理モジュール116の一方または両方から出力を受け取ることができる。たとえば、図1に示すように、相変換器は、モータの3相電流(ia,ib,ic)を二次処理モジュール116から、ならびに位置データ(θ)を一次処理モジュール114から受け取ることができる。他の入力も可能である。
[0057]相変換器113は、モータ117において測定された電流の3相デジタル表現からの3相電流(ia,ib,ic)および位置データ(θ)を、測定された電流の対応する2相デジタル表現に変換することができる。デジタル電流の2相表現は、dq軸で表現される電流信号とすることができ、および/またはd軸電流成分とq軸電流成分とを有することができる。たとえば、相変換器113は、二次処理モジュール116からの電流データならびに一次処理モジュール114および/またはセンサ115からの位置データを使用して、電流の測定された3相表現(ia,ib,ic)を電流の2相表現(id,iq)に変換するために、パーク変換または他の変換式を適用することができる。
[0058]電流の2相表現(id,iq)は、dq軸電流とすることができ、モータ117などのベクトル制御交流機との関連で適用可能な、直軸電流(id)および横軸電流(iq)を指すことがある。
[0059]2相電流(id,iq)は、相変換器113から、電流調節コントローラ111などの制御システムおよび/または電子データ処理システム120の別の構成要素のモジュールに出力することができる。相変換器113からの他の出力も可能であり、制御システムおよび/または電子データ処理システム120の他の構成要素に出力することができる。
[0060]相変換器113は、1つまたは複数のデジタル信号プロセッサ、フィールドプログラマブルゲートアレイ、他のプロセッサ、および/または種々の他の構成要素を含むことができる。さらに、またはあるいは、相変換器113は、1つまたは複数のデジタル信号プロセッサ、フィールドプログラマブルゲートアレイ、他のプロセッサ、および/または種々の他の構成要素に含めることができる。たとえば、いくつかのシステムでは、相変換器113および二次処理システム116、または相変換器113および/もしくは二次処理システム116の機能は、デジタル信号プロセッサとフィールドプログラマブルゲートアレイの組合せに含めることができる。他の構成も可能とすることができる。
[0061]電子データ処理システム120は、計算モジュール110を含むことができる。計算モジュール110は、一次処理モジュール114および二次処理モジュール116から出力を受け取ることができる。たとえば、一次処理モジュール114は、速度データ(メカニカルシャフト126の1分あたりの回転数など)を提供することができる。さらに、またはあるいは、二次処理モジュール116は、直流電圧の測定されたレベルを提供することができる。
[0062]計算モジュール110は、処理モジュール114および/または二次処理モジュール116の受け取った出力から、電圧対速度比または他のデータを処理、決定、計算、推定、または別の方法で識別することができる。たとえば、計算モジュール110は、調整した電圧対速度比318などの電圧対速度比を決定するために、受け取った直流電圧を受け取った速度データで除算することができる。他の計算または比較も可能である。
[0063]さらに、インバータ回路188に電気エネルギーを供給する電源の直流電圧レベルは、種々の要因のために、変動するすなわち変化することができる。種々の要因としては、周囲温度、電池の状況、電池の充電状態、電池の抵抗またはリアクタンス、燃料電池の状態(該当する場合)、モータの負荷状況、それぞれのモータトルクおよび対応する動作速度、および車両の電気負荷(たとえば、電気によって駆動される空調圧縮機)があるが、これらに限定されない。計算モジュール110は、特に、直流バス電圧の変動すなわち変化を補償するために、dq軸電流生成マネージャ109によって生成される電流コマンドを調整および/または影響することができる。このような調整は、調整された電圧対速度比318で行う、実施する、および/または反映することができる。
[0064]計算モジュール110の1つまたは複数の出力は、dq軸電流生成マネージャ109に送る、出力する、与える、送信される、および/または別の方法で通信することができる。
[0065]トルクコマンド生成モジュール105はまた、またはあるいは、dq軸電流生成マネージャ109に取り付ける、接続する、結合する、および/または別の方法で連通することができる。
[0066]トルクコマンド生成モジュール105そのものは、車両データバス118からの入力などの入力を受信することができる。車両データバス118は、たとえば、コントローラエリアネットワーク(CAN)または他のネットワークとすることができる。車両データバスは、いくつかのシステムでは、有線ネットワーク、無線ネットワーク、またはそれらの組合せを含むことができる。さらに、ネットワークは、インターネットなどのパブリックネットワーク、イントラネットなどのプライベートネットワーク、またはそれらの組合せであってもよく、現時点で利用可能なまたは将来開発されるさまざまなネットワークプロトコルを利用することができる。こうしたネットワークプロトコルとしては、TCP/IPベースのネットワークプロトコルがあるが、これに限定されない。
[0067]トルクコマンド生成モジュール105は、車両データバス118から受け取った信号またはトルクコマンドを取ることができ、受けとった信号に基づいてトルクコマンドデータ316を計算、識別、推定、および/または生成することができる。たとえば、受け取った信号が、アクセルペダルが踏まれたことを示す場合、トルクコマンド生成モジュール105は、モータ117に送信するべきトルクおよび/または電力を増加させるために、コマンドおよび/またはトルクコマンドデータ316を生成することができる。他の受け取った信号およびコマンドも可能である。
[0068]トルクコマンド生成モジュール105は、ルックアップテーブルを含むことができ、トルクコマンド生成モジュール105は、このルックアップテーブルを、トルクコマンド生成モジュール105によって受け取られた入力コマンドを比較および/または検索するために使用して、受け取った入力コマンドに応じて、結果として生成されるトルクコマンドデータ316を識別および/または生成することができる。他のシステムでは、トルクコマンド生成モジュール105は、受け取った入力を処理することができ、1つまたは複数のアルゴリズムおよび/またはルールベースロジックを使用することなどによって、ルックアップテーブルを使用または参照することなく、この処理した信号をdq軸電流生成マネージャ109に出力することができる。
[0069]トルクコマンド生成モジュール105は、dq軸電流生成マネージャ109に出力する、送る、および/または別の方法で通信することができる。
[0070]dq軸電流生成マネージャ109は、dq軸電流生成ルックアップテーブルとも呼ぶおよび/またはこれを含むことがあり、トルクコマンド生成モジュール105からトルクコマンドデータ316を受け取ることができる。また、またはあるいは、dq軸電流生成マネージャ109は、計算モジュール110から調整された電圧対速度比データ318を受け取ることができる。
[0070]dq軸電流生成マネージャ109は、dq軸電流生成ルックアップテーブルとも呼ぶおよび/またはこれを含むことがあり、トルクコマンド生成モジュール105からトルクコマンドデータ316を受け取ることができる。また、またはあるいは、dq軸電流生成マネージャ109は、計算モジュール110から調整された電圧対速度比データ318を受け取ることができる。
[0071]dq軸電流生成マネージャ109は、受け取ったトルクコマンドデータ316および/または電圧対速度データ318を使用して、直軸電流コマンドデータ(d軸電流コマンド(id *)など)および/または電流コマンドデータ(q軸電流コマンド(iq *)など)を検索、決定、選択、および/または生成することができる。たとえば、dq軸電流生成マネージャ109は、(1)それぞれのトルクコマンドデータ316および/もしくは調整した電圧対速度データ318を対応する直軸電流および横軸電流(id *、iq *)に関連付けるルックアップテーブル、データベース、もしくは他のデータ構造、(2)それぞれのトルクコマンドデータ316および/もしくは調整した電圧対速度データ318を対応する直軸電流および横軸電流(id *、iq*)に関連付ける二次方程式もしくは一次方程式のセット、ならびに/または(3)それぞれのトルクコマンドデータ316および/もしくは調整した電圧対速度データ318を対応する直軸電流横軸電流(id *、iq *)に関連付けるルール(if−thenルールなど)および/もしくはロジックのセット、のうちの1つまたは複数にアクセスすることによって、直軸電流コマンドおよび横軸電流コマンドを選択および/または決定することができる。dq軸電流生成モジュール109でルックアップテーブルを使用する場合、このルックアップテーブルは、dq軸電流生成モジュール109の一部とすることができ、および/またはdq軸電流生成モジュール109にアクセス可能とすることができる。ルックアップテーブルは、たとえば、三次元ルックアップテーブルとすることができる。
[0072]dq軸電流生成マネージャ109の出力は、加算器119に送信する、与える、送る、および/または別の方法で通信することができる。図1は、dq軸電流生成マネージャ109の出力と電流調整モジュール107の出力を加算できる加算器119を有するシステムを示しているが、電流調整モジュール107および/またはフィードバック制御が望ましくない、必要とされない、または有効でない他のシステムでは、電流生成マネージャ109からの出力は、電流調節コントローラ111に直接的に与えることができる。
[0073]電流調整モジュール107の出力は、ロータ磁石温度推定モジュール104、電流整形モジュール106、および/または端子電圧フィードバックモジュール108によって決定されるおよび/または送られる1つまたは複数の調整係数またはコマンドなどの、1つまたは複数の調整係数を反映することができる。
[0074]ロータ磁石温度推定モジュール104は、モータ117の1つまたは複数の構成要素に接続する、取り付ける、連通する、結合する、モータ117の1つまたは複数の構成要素を監視する、または別の方法でモータ117の1つまたは複数の構成要素の温度を推定もしくは決定することができる。たとえば、ロータ磁石温度推定モジュール104は、ロータの1つまたは複数の永久磁石の温度を推定または決定することができる。
[0075]たとえば、いくつかの実施形態では、ロータ磁石温度推定モジュール104は、1つまたは複数のセンサからロータ磁石の温度を推定することができる。このセンサは、ステータ上にあるか、ステータと熱連通するか、またはモータ117の筐体に固着される。他の実施形態では、ロータ磁石温度推定モジュール104は、ロータまたは磁石に載置された温度検出器(たとえば、赤外線熱センサのようなサーミスタおよび無線送信機)に置き換えることができ、この検出器は、1つまたは複数の磁石の温度を示すことができる無線信号などの信号を提供することができる。
[0076]ロータ温度の測定した温度および/または推定した変化に応じて、および/またはこれに基づいて、ロータ磁石温度推定モジュール104は、q軸電流コマンドおよび/またはd軸電流コマンドof調整値(調整)を生成することができる。この調整値は、電流調整モジュール107に送信されるべき調整電流コマンド、調整信号、調整係数、および/または調整データの形をとることができる。この調整値は、電流調整モジュール107に送信する、与える、送る、および/または別の方法で通信することができる。
[0077]あるいは、またはさらに、システムは、電流整形モジュール106を含むことができる。電流整形モジュール106は、たとえば、モータ117の1つまたは複数のファクタまたは特徴を測定、計算、推定、監視、および/または別の方法で識別することができる。たとえば、電流整形モジュール106は、モータ117上のトルク荷重および/またはモータ117の速度を識別することができる。他のファクタおよび/または特徴も可能である。
[0078]電流整形モジュール106は、モータ117上のトルク荷重およびモータ117の速度などのファクタまたは特徴のうちの1つまたは複数に基づいて、横軸(q軸)電流コマンドおよび直軸(d軸)電流コマンドの補整または調整を決定することができる。この補正および/または調整は、電流調整モジュール107に送信されるべき調整電流コマンド、調整信号、調整係数、および/または調整データの形をとることができる。この補正および/または調整は、電流調整モジュール107に送信する、与える、送る、および/または別の方法で通信することができる。
[0079]あるいは、またはさらに、システムは、端子電圧フィードバックモジュール108を含むことができる。端子電圧フィードバックモジュール108は、たとえば、PWMサイクルごとに電圧供給の大きさをサンプリングし、1/√3もしくは0.95/√3などの制限係数または他の係数を電圧供給に適用することなどによって、電圧供給制限を計算することができる。端子電圧フィードバックモジュール108は、電流調節コントローラ111からの端子電圧コマンドをサンプリングすることもできる。端子電圧フィードバックモジュール108は、端子電圧コマンドを電圧制限と比較することができ、端子電圧コマンドが電圧制限より大きいときはいつでも、コマンド生成モジュール107に送信されるべき調整コマンドを生成することができる。この調整コマンドは、たとえば、d軸電流調整コマンドとすることができ、電流調節コントローラ111によって生成される端子電圧コマンドを減少させることを意図することができる。
[0080]補正および/または調整は、電流調整モジュール107に送信されるべき調整電流コマンド、調整信号、調整係数、および/または調整データの形をとることができる。端子電圧フィードバックモジュール108からの調整コマンドは、電流調整モジュール107に送信する、与える、送る、および/または別の方法で通信することができる。
[0081]前述したように、ロータ磁石温度推定モジュール104、電流整形モジュール106、および端子電圧フィードバックモジュール108のうちの1つまたは複数は、dq軸電流調整モジュール107に結合されることができ、および/またはdq軸電流調整モジュール107と連通することが可能である。
[0082]電流調整モジュール107は、ロータ磁石温度推定モジュール104、電流整形モジュール106、および端子電圧フィードバックモジュール108のうちの1つまたは複数からの調整信号、調整係数、調整コマンド、および/または調整データを収集することができる。電流調整モジュール107は、ロータ磁石温度推定モジュール104、電流整形モジュール106、および端子電圧フィードバックモジュール108のそれぞれからの調整データおよび/またはコマンドを追加、総計/同化、評価、および/または別の方法で説明することができ、このデータを使用して、完全なまたは全体の調整コマンドを生成および/または作成することができる。収集した調整データが調整コマンドを含む場合、電流調整モジュール107は、調整コマンドをまとめて総計、加算、および/または組み合わせて、1つの調整コマンドを形成することができる。他の状況では、電流調整モジュール107は、加算ブロック119で加算できる信号を得るために、調整コマンドをさらに処理する必要があることができる。この完全なまたは全体の調整コマンドは、たとえば、調整コマンド、調整したd軸電流コマンド、d軸電流調整コマンド、またはd軸電流調整値と呼ぶこともできる。
[0083]電流調整モジュール107は、ロータ磁石温度推定モジュール104、電流整形モジュール106、および端子電圧フィードバックモジュール108からの入力データに基づいて直軸電流コマンドデータを調整するために、調整したd軸電流コマンドなどの、このd軸電流調整データを提供することができる。
[0084]次に、電流調整モジュール107は、dq軸電流生成マネージャ109または加算器119と通信することができる。たとえば、電流調整モジュール107は、d軸電流調整コマンドを加算器119に送信する、与える、送る、および/または別の方法で通信することができ、加算器119は、d軸電流調整コマンドをdq軸電流生成マネージャ109からの出力に加算することができる。
[0085]図1は、ロータ磁石温度推定モジュール104、電流整形モジュール106、および端子電圧フィードバックモジュール108のそれぞれを電流調整モジュール107に接続し、電流調整モジュール107からの1つの出力が加算ブロック119に与えられるように示されているが、他の構成も可能である。たとえば、ロータ磁石温度推定モジュール104および電流整形モジュール106が含まれないまたはディスエーブルの場合、端子電圧フィードバックモジュール108からの出力は、加算器119に直接的に送ることができる。種々の他構成も可能である。
[0086]加算器119は、いくつかのシステムでは加算ブロックまたは加算モジュールと呼ぶことがあり、dq軸電流生成マネージャ109からdq電流コマンドを受け取ることができる。また、またはあるいは、加算器119は、電流調整モジュール107からd軸電流調整コマンドを受け取ることができる。加算器119は、d軸電流調整コマンドをdq電流コマンドに加えることができ、調整した電流コマンドを出力することができる。この調整した電流コマンドは、2相電流コマンド(id *,iq *)として表すことができる。
[0087]図1は、加算器119に送られるdq軸電流調整コマンドを示しているが、いくつかのシステムでは、dq軸電流調整コマンドは、dq軸電流生成マネージャ109に直接的に送ることができ、ならびに/またはモータ117を制御および/もしくは給電する際に使用するべき適切な電流コマンドを選択するためにdq軸電流生成マネージャによって使用することができる。
[0088]加算器119からの調整した電流コマンドは、電流調節コントローラ111に送信する、与える、送る、および/または別の方法で通信することができる。前述したように、電流調節コントローラ111は、実際の2相電流(id,iq)も相変換器113から受け取ることができる。
[0089]電流調節コントローラ111は、受け取ったそれぞれのdq軸電流コマンド(たとえば、id *およびiq *)および実際のdq軸電流(たとえば、idおよびiq)を処理することができ、処理した入力に基づいて、1つまたは複数の対応するdq軸電圧コマンド(たとえば、vd *コマンドおよびvq *コマンド)を出力することができる。これらのdq軸電圧コマンド(vd *,vq *)は、2相電圧コマンドとすることができ、生成モジュール112に送信する、与える、送る、およびまたは別の方法で通信することができる。
[0090]生成モジュール112は、空間ベクトルPWM生成モジュールなどのパルス幅変調(PWM)生成モジュールとすることができ、2相電圧コマンド(vd *,vq *)などの電圧コマンドを電流調節コントローラ111から受け取ることができる。生成モジュールは、受け取った端子電圧コマンドに基づいて、3相電圧コマンドを生成することができる。たとえば、生成モジュール112は、直軸電圧コマンドおよび横軸電圧コマンド(vd *,vq *)を2相データ表現からva *、vb *、およびvc *などの3相表現に変換することができる。3相表現va *、vb *、およびvc *は、いくつかのシステムでは、モータ117を制御するために望ましい電圧を表すことができる。
[0091]3相電圧コマンド表現(va *、vb *、およびvc *)は、インバータスイッチング回路188に送る、与える、送信する、および/または通信することができる。インバータスイッチング回路188は、モータ117を制御するために3相電圧コマンドを生成することができる。3相電圧コマンドは、生成モジュール112から受け取った3相電圧コマンド信号(va *、vb *、およびvc *)に基づくことができる。少なくともこのようにして、制御システムは、モータ117を制御するように動作することができる。
[0092]いくつかのシステムおよび/または実施形態では、生成モジュール112は、インバータスイッチング回路188に関して以前に説明した同じ電源によって給電することができる。いくつかのシステムでは、生成モジュール112およびインバータスイッチング回路188は、同じ構成要素の一部とすることができ、電流調節コントローラ111から2相電圧コマンドを受け取り、モータ117を駆動するために3相電圧コマンドをモータ117に出力することができることができる。
[0093]図2は、制御システムの一例を示す。図2の制御システムは、電子データプロセッサ264と、データバス262と、データ記憶デバイス260と、1つまたは複数のデータポート(268、270、272、274、および276)とを含むことができる。図2の制御システムは、図1の電子データ処理システム120のすべてまたは一部を含むことができる。データプロセッサ264、データ記憶デバイス260、および1つまたは複数のデータポートは、データプロセッサ264、データ記憶デバイス260、および1つまたは複数のデータポートの間におけるデータの通信をサポートするために、データバス262に結合することができる。図2で同様の番号が付されている構成要素は、図1内の同じ構成要素と同じまたは類似したような構造であるおよび/または機能することができる。
[0094]制御システム、電子データ処理システム120、および/または電子データ処理システム120の種々の構成要素は、コンピュータシステムなどの種々の種類の1つまたは複数のコンピューティングデバイスであってもよいし、これを含むことができる。このコンピュータシステムは、コンピュータシステムに本明細書で開示される方法またはコンピュータベースの機能のうちの任意の1つまたは複数を実行させるために実行可能な命令のセットを含むことができる。コンピュータシステムは、スタンドアロンデバイスとして動作してもよいし、たとえばネットワークを使用して、他のコンピュータシステムまたは周辺機器に接続してもよい。コンピュータシステムは、コンピュータ、プロセッサ、および/または他のプログラム可能な装置を含むことができる。コンピュータ、プロセッサ、および/または他のプログラム可能な装置の挙動は、コンピュータプログラム、アプリケーション、および/または他の形態のソフトウェアによって命令することができる。コンピュータ可読メモリなどの、制御システム内のメモリ、制御システムと共に使用するメモリ、または制御システムによって使用されるメモリは、コンピュータ、プロセッサ、および/または他のプログラム可能な装置に、コンピュータ、プロセッサ、および/または他のプログラム可能な装置によって使用されるとき特定の方法で機能するように命令するために使用することができる。本明細書において流れ図によって説明する方法などのモータを制御する方法は、コンピュータ、プロセッサ、および/または他のプログラム可能な装置の上で、またはこれらを用いて、一連の動作ステップとして実行することができる。
[0095]ネットワーク化された展開では、コンピュータシステムは、サーバクライアントユーザネットワーク環境において、サーバとして、またはクライアントユーザコンピュータとして、動作することができる。コンピュータシステムは、プロセッサ、たとえば中央処理装置(CPU)、グラフィック処理装置(GPU)、またはこれらの両方を含むことができる。たとえば、制御システムおよび/または電子データ処理システム120は、図2に示されるデータプロセッサ264を含むことができる。
[0096]データプロセッサ264は、さまざまなシステム内の構成要素とすることができる。たとえば、プロセッサは、標準的なパーソナルコンピュータまたはワークステーションの一部とすることができる。プロセッサは、1つまたは複数の汎用プロセッサ、デジタル信号プロセッサ、特定用途向け集積回路、フィールドプログラマブルゲートアレイ、サーバ、ネットワーク、デジタル回路、アナログ回路、それらの組合せ、またはデータを分析および処理するための現在知られているもしくは将来開発される他のデバイスとすることができる。データプロセッサ264は、電子データプロセッサ、マイクロプロセッサ、マイクロコントローラ、プログラマブルロジックアレイ、論理回路、演算論理装置、特定用途向け集積回路、デジタル信号プロセッサ、比例積分微分(PID)コントローラ、または別のデータ処理デバイスのうちの1つまたは複数を含むことができる。プロセッサは、手動で生成したコード(すなわちプログラム)などのソフトウェアプログラムを実施することができる。
[0097]データプロセッサ264は、電子データ処理システム120、ポート268、270、272、274、および276のうちの1つもしくは複数、ならびに/またはデータ記憶デバイス260に結合することができる。データプロセッサ264は、電子データ処理システム120で実施される種々の処理を遂行または支援することができる。たとえば、電子データ処理システム120の特徴および機能を実施するロジックおよび/またはソフトウェアは、データプロセッサ264によって部分的または完全に実行することができる。
[0098]データプロセッサ264は、データバス262に接続することができる。データバス262は、1つまたは複数のデータバスを含むことができる。データバス262は、さまざまなデータバスまたはデータバスの組合せのいずれかであってもよい。制御システムの1つまたは複数の構成要素は、構成要素間の通信を容易にするおよび/またはサポートするなどのために、データバス262に結合することができる。たとえば、データプロセッサ264、データ記憶デバイス260、および1つまたは複数のデータポート(268、270、272、274、および276)は、データプロセッサ264、データ記憶デバイス260、および1つまたは複数のデータポート間におけるデータの通信をサポートするために、データバス262に結合される。
[0099]データ記憶デバイス260は、電子データ処理システム120のすべてまたは一部を記憶するおよび/または含むことができる。たとえば、図2では、検知回路124、アナログ/デジタル変換器122、一次処理モジュール114、二次処理モジュール116、相変換器113、計算モジュール110、dq軸電流生成マネージャ109、加算器または加算モジュール119、電流整形モジュール106、ロータ磁石温度推定モジュール104、端子電圧フィードバックモジュール108、電流調整モジュール107、トルクコマンド生成モジュール105、電流調節コントローラ111、および/または生成モジュール112は、データ記憶デバイス260に含める、および/またはこれと通信することができる。データ記憶デバイス260に含める構成要素は、これより少なくてもよいし、多くてもよい。さらに、またはあるいは、これより多いまたは少ないデータ記憶デバイス260を、電子データ処理システム120のすべてまたは一部に使用することができる。
[00100]データ記憶デバイス260は、データを記憶するために、任意の磁気デバイス、電子デバイス、または光デバイスを備えることができる。たとえば、データ記憶デバイス260は、電子データ記憶デバイス、電子メモリ、不揮発性電子ランダムアクセスメモリ、1つまたは複数の電子データレジスタ、データラッチ、磁気ディスクドライブ、ハードディスクドライブ、光ディスクドライブなどを備えることができる。
[00101]データ記憶デバイス260は、メモリを含むことができる。このメモリは、主記憶装置、スタティックメモリ、またはダイナミックメモリとすることができる。このメモリとしては、種々のタイプの揮発性記憶媒体および不揮発性記憶媒体などのコンピュータ可読記憶媒体を含むことができるが、これらに限定されない。これらの記憶媒体には、ランダムアクセスメモリ、読出し専用メモリ、プログラマブル読出し専用メモリ、電気的プログラマブル読出し専用メモリ、電気的に消去可能な読出し専用メモリ、フラッシュメモリ、磁気テープまたは磁気ディスク、光媒体があるが、これらに限定されない。一実施形態では、メモリは、プロセッサのためのキャッシュまたはランダムアクセスメモリを含む。代替実施形態では、プロセッサのキャッシュメモリ、システムメモリ、または他のメモリなどのメモリは、プロセッサとは別個である。メモリは、データを記憶するための記憶デバイスまたはデータベースの外部にあることができる。例としては、ハードドライブ、コンパクトディスク(「CD」)、デジタルビデオディスク(「DVD」)、メモリカード、メモリスティック、フロッピー(登録商標)ディスク、ユニバーサルシリアルバス(「USB」)メモリデバイス、またはデータを記憶するように動作可能な他の任意のデバイスがある。メモリは、プロセッサによって実行可能な命令を記憶するように動作可能である。図に示されるかまたは本明細書において説明する機能、行為、またはタスクは、メモリに記憶された命令を実行するプログラムプロセッサによって実行することができる。機能、行為、またはタスクは、特定のタイプの命令セット、記憶媒体、プロセッサ、または処理方策と無関係であり、単独でまたは組み合わせて動作する、ソフトウェア、ハードウェア、集積回路、ファームウェア、マイクロコードなどによって実行することができる。同様に、処理方策は、多重処理、マルチタスキング、並列処理などを含むことができる。
[00102]「コンピュータ可読媒体」という用語は、集中型データベースもしくは分散データベースなどの単一の媒体もしくは複数の媒体、ならびに/または1つもしくは複数の命令セットを記憶する関連するキャッシュおよびサーバを含むことができる。「コンピュータ可読媒体」という用語は、プロセッサにより実行するための命令セットの記憶、符号化、もしくは実行が可能な、またはコンピュータシステムに本明細書で開示される方法もしくは動作のうちの任意の1つもしくは複数を実行させる、任意の媒体も含むことができる。「コンピュータ可読媒体」は、一時的でなくてもよく、有形であってもよい。
[00103]特定の非限定的な例示的な実施形態では、コンピュータ可読媒体としては、メモリカードなどのソリッドステートメモリまたは1つもしくは複数の不揮発性読出し専用メモリを収容する他の包装を含むことができる。さらに、コンピュータ可読媒体は、ランダムアクセスメモリまたは他の揮発性書き換え可能メモリとすることができる。さらに、コンピュータ可読媒体としては、ディスクまたはテープまたは伝送媒体上で通信される信号などの搬送波信号を捕捉する他の記憶デバイスなどの光磁気媒体または光媒体を含むことができる。電子メールへのデジタル添付ファイルまたは他の独立情報アーカイブもしくはアーカイブセットは、有形記憶媒体である配布媒体と見なしてもよい。したがって、本開示は、コンピュータ可読媒体または配布媒体および他の等価物および後継媒体のうちの任意の1つまたは複数を含み、これらの媒体には、データまたは命令を記憶することができると考えられる。
[00104]代替実施形態では、特定用途向け集積回路、プログラマブルロジックアレイ、および他のハードウェアデバイスなどの専用ハードウェア実装形態は、本明細書において説明する方法のうちの1つまたは複数を実施する構造とすることができる。種々の実施形態の装置およびシステムを含んでもよいアプリケーションは、さまざまな電子システムおよびコンピュータシステムを広く含むことができる。本明細書においてを説明する1つまたは複数の実施形態は、モジュール間でモジュールによって通信できる関連する制御信号およびデータ信号を有する2つ以上の相互接続された特定のハードウェアモジュールもしくはデバイスを使用して、または特定用途向け集積回路の一部分として、機能を実施することができる。したがって、本システムは、ソフトウェア実装形態、ファームウェア実装形態、およびハードウェア実装形態を包含する。
[00105]データポート268、270、272、274、および/または276は、データバス262、データ記憶デバイス260、および/またはデータプロセッサ264への入力、ポート、および/または他の接続を表すことができる。また、またはあるいは、図2の制御システムのデータポート268、270、272、274、および/または276は、モータ117、制御システム、ユーザインタフェース、ディスプレイ、センサ、変換器、および/または他の回路の1つまたは複数の構成要素に結合することができる。各データポートは、たとえば、トランシーバとバッファメモリとを備えることができる。いくつかのシステムでは、各データポートは、任意のシリアル入/出力ポートまたはパラレル入/出力ポートを備えることができる。
[00106]たとえば、車両へのペダルまたは他のユーザインタフェースなどのコントローラ266は、車両データバス118に接続する、取り付ける、結合する、および/または連通することができる。車両の操作者は、スロットル、ペダル、コントローラ266、または他の制御デバイスなどのユーザインタフェースを介して、トルクコマンドを生成することができる。生成したトルクコマンドは、速度制御データメッセージ、電圧制御データメッセージ、またはトルク制御データメッセージなどの制御データメッセージとすることができる。車両データバス118は、第1のデータポート268を介して、データバスメッセージをトルクコマンドと共にトルクコマンド生成モジュール105に提供することができる。種々の他の入力および/またはメッセージは、トルクコマンド生成モジュール105によって受け取ることができる。
[00107]電子データ処理システム120は、テンキー、キーボード、またはマウスもしくはジョイスティックなどのカーソル制御デバイス、タッチスクリーンディスプレイ、遠隔コントローラ、またはコンピュータシステムと相互作用するように動作可能な他の任意のデバイスなどのシステムの構成要素のいずれかとユーザが相互作用できるように構成された他の入力デバイスを含むことができる。少なくともこのようにして、トルクコマンド生成モジュール105は、電子データ処理システム120の第1のデータポート268と結び付けるか、またはこれによってサポートすることができる。
[00108]あるいは、またはこれに加えて、インバータスイッチング回路188は、たとえば第2のデータポート270などによってデータバス262に結合することができ、第2のデータポート270はデータバス262に結合することができる。さらに、またはあるいは、センサ115および/または一次処理モジュール114は第3のデータポート272に結合することができ、第3のデータポート272はデータバス262に結合することができる。さらに、またはあるいは、検知回路124はアナログ/デジタル変換器122に結合することができ、アナログ/デジタル変換器122は第4のデータポート274に結合することができる。さらに、またはあるいは、端子電圧フィードバックモジュール108は第5のデータポート276に結合することができ、第5のデータポート276はデータバス262に結合することができる。
[00109]データポートは第1、第2、第3などと示されているが、データポートに順序を付けなくてもよく、これより多いもしくは少ない入力および/もしくは構成要素を任意の1つのデータポートに取り付けてもよく、および/または1つもしくは複数のデータポートを組み合わせて1つのデータポートにしてもよい。データポートは、入力を電子データ処理システム120に提供しやくすることができる。
[00110]図示してはいないが、制御システムおよび/または電子データ処理システム120は、液晶ディスプレイ(LCD)、有機発光ダイオード(OLED)、フラットパネルディスプレイ、ソリッドステートディスプレイ、陰極線管(CRT)、プロジェクタ、プリンタ、または決定した情報を出力するための他の現在知られているもしくは将来開発されるディスプレイデバイスなどのディスプレイユニットをさらに含むことができる。このディスプレイは、ユーザがプロセッサの機能を確認するインタフェースとして、または具体的には、メモリまたはドライブユニットに記憶されたソフトウェアを有するインタフェースとして、働くことができる。
[00111]さらに、電子データ処理システム120および/または制御システムは、ディスクユニットまたは光学ドライブユニットも含むことができる。このディスクドライブユニットはコンピュータ可読媒体を含むことができ、このコンピュータ可読媒体には、1つまたは複数の命令セット、たとえばソフトウェアを組み込むことができる。さらに、この命令は、本明細書において説明する方法またはロジックのうちの1つまたは複数を実施することができる。特定の実施形態では、この命令は、コンピュータシステムによる実行中にメモリおよび/またはプロセッサの内部に完全にまたは少なくとも部分的に常駐することができる。メモリおよびプロセッサはまた、上記で説明したコンピュータ可読媒体を含むことができる。
[00112]本開示の種々の実施形態によれば、本明細書において説明する方法は、コンピュータシステムにより実行可能なソフトウェアプログラムによって実施することができる。さらに、例示的な非限定的な一実施形態では、実装形態は、分散処理と、コンポーネント/オブジェクト分散処理と、並列処理と含むことができる。あるいは、仮想コンピュータシステム処理は、本明細書において説明する方法または機能のうちの1つまたは複数を実施するような構造とすることができる。
[00113]モータ117の電流は、いくつかの方法で監視および/または測定することができる。モータ117の測定した電流の大きさは、1つまたは複数の要因に依拠および/または左右されることがある。たとえば、測定した電流の大きさは、電流検知時点、電流変換器の換算ドリフト(scaling drift)、パルス幅変調スイッチング周波数の選択、および/またはPI利得の選択に依拠することがある。
[00114]モータ117における電流の適切な測定は、適正なまたはほぼ適正な電流の大きさをモータ117から測定したことによって容易になる、および/またはこれを必要とする場合がある。特に、モータ117の電流を特定の時点で測定するようにシステムを較正することが有用または必要な場合があり、この特定の時点は電流検知時点とも呼ばれる。たとえば、電流信号の平均化点または平均点(averaging or averaged point)でモータ117の電流を確実に測定することを希望する場合がある。これは、たとえば、正確なフィードバックを電流調節コントローラ111に提供するために必要な場合がある。
[00115]説明したように、生成モジュール112および/またはインバータスイッチング回路188はwhich電圧コマンドを生成することができ、この電圧コマンドをモータ117に送信するまたは送ることができる。たとえば、生成モジュール112が空間ベクトルパルス幅変調生成モジュールである場合、電圧コマンドは、リプル成分を含むことができる3相電流を生成することができる。浮動中性点電圧(Van)への応用機械相端子(applied machine phase terminal)のための以下の式が示すように、リプル成分は、PWMスイッチング周波数の2倍となる場合がある。
van=rsis+L(dia/dt)−ωcλfsin(θ)
ここで、Lは相のインダクタンスであり、ωcは電気的周波数であり、λfは相の逆emfである。上記の式は、電流リプルの大きさは主にL(相のインダクタンス)およびPWMスイッチング周波数によって決定されることができ、電圧期間に反比例する場合があることを示す。
ここで、Lは相のインダクタンスであり、ωcは電気的周波数であり、λfは相の逆emfである。上記の式は、電流リプルの大きさは主にL(相のインダクタンス)およびPWMスイッチング周波数によって決定されることができ、電圧期間に反比例する場合があることを示す。
[00116]1つまたは複数の要因が生じることがあり、それによって、平均化点で電流を検知することが困難になる場合がある。たとえば、制御システムでは、ハードウェア回路相遅延、電流サンプル処理もしくはフィルタリング遅延、電流読取り遅延、および/または電源スイッチ不感時間遅延などの1つまたは複数の遅延が発生することがある。
[00117]電流検知時点で遅延が発生した、および/または正しいモータの電流を正確に検知するようにその時点がチューニングされていない場合、このような測定に依拠する任意のフィードバックシステムの利益が損なわれることがあり、および/または適切に動作しないことがある。たとえば、時間の適正でない電流検知時点によって生じる誤ったフィードバック電流は、電流コマンドと実際の電流rms値の不一致を招くことがあり、これが不安定な制御システムにつながる場合がある。
[00118]したがって、上記で説明した遅延のうちの1つまたは複数を補償する(account for)ために電流検知時点を較正することが有益な場合がある。たとえば、制動モードおよび/または動力モードにおけるモータ117の動作に基づいて電流検知時点を微調整および/または別の方法で設定する場合がある。
[00119]電流検知時点は、電流信号を検知する時点として説明することができるが、いくつかのシステムおよび方法では、電流を常に検知することができ、電流検知時点は単に常に検知される電流をラッチまたは別の方法で利用もしくは取得してさらなる処理および/または分析のために送信する時点を指すことがあることに留意されたい。電流検知時点は、電流検知時点が電流の上昇または低下するスロープの平均化点に対応するように常に受け取ることができる電流信号のセットから、電流値をラッチするように構成することができる。
[00120]前述したように、モータ117の測定した電流の大きさは、電流検知時点、電流変換器の換算ドリフト、パルス幅変調スイッチング周波数の選択、および/またはPI利得の選択に依拠および/または左右されることがある。これらの中で、電流検知時点のみが、モータが制動モードで動作しているときと動力モードで動作しているときで反対の効果を示す。
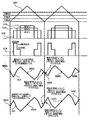
[00121]図3は、パルス幅変調生成モジュール112によって生成される信号などの例示的な信号305を示す。信号305は、モータ117の3つの端子に送信されるべきそれぞれのパルス幅変調電圧信号を生成するために相A、B、およびCに対してPWM生成モジュールにより使用されるPWM搬送波信号または波形などの基本搬送波波形とすることができる。生成されるモータ端子パルス幅変調電圧信号はそれぞれ、信号315、317、および319と表すことがある。浮動中性点電圧に対する相などの浮動中性点電圧に対する相端子(phase terminal)は、電圧Van310と表すことがあり、電圧信号315、317、および319に基づいて取得することができる。
[00122]図3では、電流信号340は、モータが動力モードで動作しているときのモータ117からの理想的な電流信号、すなわち遅延の発生しない電流信号に相当し、この電流信号では遅延は発生しない。電流信号345は、モータが制動モード(すなわち発電モード)で動作しているときのモータ117からの理想的な電流信号に相当する。前述したように、電流信号340および345の周波数は、PWM搬送波信号305の周波数の2倍であり、リプル効果を含む。したがって、平均化点320A、320B、320C、320D、および320Eなどの電流信号の平均化点で電流信号340を測定することが重要である。同様に、平均化点325A、325B、325D、および325Eで電流信号345を測定することも重要である。
[00123]しかし、電流検知時点がリプル電流平均化時点より早いとき、制動モードおよび動力モードのそれぞれで異なる効果を示すことがある。動力モードでは、より大きな大きさが測定されることがあり、これが、電流フィードバックシステムでは、大きさがより大きくなり、実際の電流では、大きさがより小さくなることにつながることがある。反対に、制動モードでは、より小さな大きさの電流が測定されることがあり、これが、電流フィードバックシステムでは、大きさを示す値がより小さくなり、実際の電流では、大きさがより大きくなることにつながることがある。
[00124]そうではなく、電流検知時点がリプル電流平均化時点より遅いとき、結果は逆になる。動力モードでは、より小さな大きさの電流が測定されることがあり、これは、電流フィードバックシステムでは、大きさがより小さくなり、実際の電流では、大きさがより大きくなることにつながることがある。その代わりに、制動モードでは、より大きな大きさの電流が測定されることがあり、これが、電流フィードバックシステムでは、大きさを示す値がより大きくなり、実際の電流では、大きさがより小さくなることにつながることがある。
[00125]システムのこれらの特徴および/または特性は、電流検知時点を較正する方法を提供することができる。図4の方法は、これらの特性を利用して電流検知時点を較正する1つの方法を提案するものである。
[00126]図4の方法はブロック402で始まることができ、ブロック402では、検知した電流信号のどれをラッチすべきかについて電流検知時点を識別することができる。
[00127]ブロック404では、モータがあるシャフト速度において動力モードで動作しながらモータ117を制御するために電流コマンドをモータ117に提供することができる。電流コマンドは、たとえば、あるガンマ角における電流の大きさを含む電流コマンドとすることができる。モータ117は、設定および/または決定されたシャフト速度で動作することができる。
[00127]ブロック404では、モータがあるシャフト速度において動力モードで動作しながらモータ117を制御するために電流コマンドをモータ117に提供することができる。電流コマンドは、たとえば、あるガンマ角における電流の大きさを含む電流コマンドとすることができる。モータ117は、設定および/または決定されたシャフト速度で動作することができる。
[00128]ブロック406では、モータが電流コマンドによって制御され、動力モードで動作するとき、実際の電流をモータ117から監視および/または測定することができる。たとえば、電流コマンドに応じて動力モードで動作する3相モータ117の実際の平均化rms電流の大きさは、ブロック402で識別された電流検知時点で検知および/または監視することができる。監視および/または測定は、電力分析器、オシロスコープ、Labview、または他の監視デバイスもしくは測定デバイスを使用すると、行うことができる。
[00129]ブロック408では、電流整合コマンド、同じ電流コマンド、および/または同一の電流コマンドを与える、送る、および/または別の方法で実行することができる。この電流整合コマンドは、たとえば、同じガンマ角における電流の同じ大きさを含むことができる。この電流整合コマンドは、同じシャフト速度において制動モードで動作する同じモータ117に送信することができる。いくつかのシステムでは、制動モードは、同じシャフト速度であるが動力モードとは反対の回転方向におけるモータの動作とすることができる。
[00130]ブロック410では、モータが電流コマンドによって制御され、制動(すなわち発電)モードで動作するとき、実際の電流をモータ117から監視および/または測定することができる。たとえば、同じコマンドに応じて制動モードで動作する3相モータ117の第2の実際の平均化rms電流の大きさは、ブロック402で識別された電流検知時点で検知および/または監視することができる。監視および/または測定は、電力分析器、オシロスコープ、Labview、または他の監視デバイスもしくは測定デバイスを使用すると、行うことができる。
[00131]図4の方法は、ブロック408および410の前にブロック404および406を実行することを示すが、ブロック404および406の前にブロック408および410を実行するように、またはこれらの同時にブロックを実行するように、方法の順序を修正することができる。
[00132]ブロック412では、電流時点において動力モードで測定したモータ117の実際の平均化電流は、電流時点において制動モードでモータ117の測定した実際の平均化電流と比較することができる。
[00133]最良、理想的な、および/または適正な電流検知時点は、モータが動力モードであるときと制動モードであるとき、モータ117の測定した実際の平均化電流は同じであるものとすることができる。したがって、これらの測定または観測した実際の平均化電流が等しいとき、この方法はブロック414に進むことができる。ブロック414では、電流検知時点は、電流検知時点が適切な平均化時点で電流信号を正確に測定および/または監視していることを確信して、モータの後続の動作の全体を通じて較正および/または使用すると見なすことができる。
[00134]あるいは、動力モードにおけるモータ117の測定または観測した実際の平均化電流が制動モードと同じでない場合、方法はブロック416に進むことができる。ブロック416では、ブロック402から特定した電流検知時点を調整することができる。たとえば、アルゴリズム、ルックアップテーブル、および/またはルールもしくはロジックは、実際の測定した平均化電流の違いを比較することができ、どの時間方向に電流検知時点を調整するべきかを決定することができる。たとえば、アルゴリズムは、動力モードで測定したモータ117の実際の平均化電流が制動モードで測定したモータ117の実際の平均化電流より大きい以降の時点、および制動モードで測定したモータ117の実際の平均化電流が動力モードで測定したモータ117の実際の平均化電流より大きい以降の時点を測定するように電流検知時点を調整することができる。この手順を、電流検知時点のチューニングと呼ぶことがある。いくつかの方法では、パルス幅変調周期ごとに電流検知時点を調整することができる。他の方法および/または手順も可能である。
[00135]ブロック416の後で、方法は、ブロック404に戻り、ブロック412に再度到達するまで図4の方法を再び続行することができる。ブロック412で、動力モードで測定したモータ117の実際の電流と制動モードで測定した電流が等しい場合、方法はブロック414に進み、そうでない場合、方法はブロック416に戻り、プロセスを繰り返す。
[00136]図4の方法の修正版では、ブロック402および416を無視することができる。この修正版では、方法は、動力モードのモータ117を介してコマンドを実行し、モータ117から電流を連続的に検知することによって始めることができる。同様に、モータは、同じシャフト速度で動作しながら同じコマンドによるコマンドを受けることができるが、モータ117は制動モードで動作する。電流は、この動作中にも連続的に検知することができる。方法のこの修正版では、ブロック412を、モードごとに検知される電流全体に基づいて電流検知時点を計算するブロックで置き換えることができる。たとえば、検知した2つの電流信号を比較して、検知した電流信号の値が等しい時点を特定することができる。次に、これを、ブロック412で電流検知時点として特定することができる。
[00137]図4のブロックは、すべて、または部分的に、データプロセッサ264などのプロセッサによって、一次処理モジュール114もしくは二次処理モジュール116のどちらか、または他の任意の内部もしくは外部のプロセッサもしくはモジュールによって実行することができる。あるいは、またはこれに加えて、電流検知時点を計算および/または較正するために、外部ルーチンおよび診断較正モジュールまたはシステムを実施することができる。
[00138]少なくこのようにして、動力モードにおけるモータ117の実際の平均化電流を制動モードにおけるモータ117の実際の平均化電流と比較することによって、実際の平均化電流が等しい点を決定することができる。次に、電流検知時点を特定および/または構成することができ、したがって、正確にそれらの時点で、電流を検知および/またはラッチする。
[00139]さらに、またはあるいは、適正な電流検知時点を他の方法で較正することができる。いくつかの方法では、ハードウェア相遅延、電流サンプル処理遅延、電流読取り遅延、および不感時間電流相遅延のそれぞれに対して補正の量を個別に計算することができる。これに類似した方法の一例が図5に示されている。
[00140]図5の方法はブロック502で始まることができ、ブロック502では、ハードウェア回路相遅延を測定することができる。
[00141]前述したように、制御システムでは、ハードウェア遅延が発生することがある。ハードウェア遅延は、たとえば、モータ117に取り付けられたかまたは別の方法で結合された電流変換器から生じるおよび/または関連することがある。あるいは、またはこれに加えて、ハードウェア遅延は、ローパスアンチエイリアシングフィルタなどの1つもしくは複数のフィルタならびに/またはアナログ信号の換算およびオフセットを調整するために使用される演算増幅器などの演算増幅器を使用することから生じることがある。あるいは、またはこれに加えて、ハードウェア遅延は、アナログ/デジタル変換器を使用することから生じることがある。アナログ/デジタル変換器は、サンプリングを有するおよび/もしくは引き起こすならびに/または遅延を保つことがある。
[00141]前述したように、制御システムでは、ハードウェア遅延が発生することがある。ハードウェア遅延は、たとえば、モータ117に取り付けられたかまたは別の方法で結合された電流変換器から生じるおよび/または関連することがある。あるいは、またはこれに加えて、ハードウェア遅延は、ローパスアンチエイリアシングフィルタなどの1つもしくは複数のフィルタならびに/またはアナログ信号の換算およびオフセットを調整するために使用される演算増幅器などの演算増幅器を使用することから生じることがある。あるいは、またはこれに加えて、ハードウェア遅延は、アナログ/デジタル変換器を使用することから生じることがある。アナログ/デジタル変換器は、サンプリングを有するおよび/もしくは引き起こすならびに/または遅延を保つことがある。
[00142]ローパスアンチエイリアシングフィルタなどのフィルタ、演算増幅器、およびアナログ/デジタル変換器からのハードウェア遅延は、広範なテストを必要としない場合があるが、その代わり、解析的分析によって計算および/または推定するのが簡単な場合がある。ハードウェア遅延が電流変換器に起因する状況では、相遅延が製造業者の製品シートから明らかでないことがあり、その結果、手動でテスト、較正、および/または決定することが必要な場合がある。
[00143]ハードウェア回路相遅延は、多数の方法で測定することができる。たとえば、1つの方法では、1対の測定デバイスおよび/または2つのポートを有する1つの測定デバイスを使用することができる。1つの測定デバイスは、モータに接続し、および/またはモータ117から出力されるとすぐに信号を受け取ることができ、第2の測定デバイスは、モータ117に接続し、ならびに/または信号がシステムのハードウェア回路を通過した後、および/もしくは信号が以下で説明するフィールドプログラマブルゲートアレイ870などのフィールドプログラマブルゲートアレイもしくは複合プログラマブルロジックデバイス(CPLD)もしくは他のデバイスなどの他のデジタル記憶コンピューティングデバイスによって受け取られる直前に、モータ117から信号を受け取ることができる。信号は両方とも表示し、および/または互いと比較することができ、第2の信号の遅延は、容易に測定および/またはこの比較に基づいて計算することができる。この遅延を測定する他の方法も可能とすることができる。
[00144]ブロック504では、電流サンプル処理またはフィルタリング遅延を測定することができる。制御システムでは、電流サンプルの処理に関連する遅延が発生することがある。電流サンプル処理遅延は、たとえば、フィールドプログラマブルゲートアレイにおけるFIRフィルタなどのサンプル上のデジタルフィルタから生じることがあり、FIRフィルタは、電流信号中のノイズを除去するために使用することができる。いくつかの状況では、この遅延は、フィルタ設計パラメータに基づいて、および/または遅延説明するためにソフトウェアもしくは他のロジックを使用して、明確に計算することができる。この遅延は、たとえば、ソフトウェア遅延とすることができる。サンプリングされたデジタル電流の拡大縮小および/またはオフセット設定から生じる遅延は、無視できる遅延を引き起こす可能性が高くない場合がある。
[00145]この電流サンプル処理またはフィルタリング遅延は、ソフトウェアおよび/またはフィールドプログラマブルゲートアレイまたは他のタイプのデジタル記憶および/またはコンピューティングデバイスによって実行される正確に導出した数学方程式であることがある。いくつかのシステムでは、この遅延は一定である場合がある。計算または推定の他の方法も可能とすることができる。
[00146]ブロック506では、電流読取り遅延を推定または計算することができる。制御システムでは、電流の読取りに関連する遅延が発生することがある。電流読取り遅延は、たとえば、電流位置同期および/または変換のために電流サンプルを電流調節コントローラ111に読み込むようにコマンドを受けたときなどに、コントローラまたは他の構成要素によって引き起こされるおよび/またはこれらから生じることがある。たとえば、以下で図8を参照して説明するフィールドプログラマブルゲートアレイ870とデジタル信号プロセッサ850などの、フィールドプログラマブルゲートアレイとデジタル信号プロセッサの間での信号の変換は、これらの構成要素間でそれらを接続するパラレルバスを使用して達成することができ、一方から他方へと信号を送信することに関連する遅延が存在する場合がある。いくつかのシステムでは、最新の電流サンプルのみを、電流調節コントローラ111によって読み込むことができる。したがって、これらの遅延は、考慮するべき小さな変化する時間遅延および/または小さな平均化効果を有することがある。いくつかのシステムでは、電流読取りコマンドの読取りが到着したとき、最新の電流サンプルは、生電流をどれくらい速くサンプリングしたかに応じて、ちょうど使用可能であるか、または1つまたは少数のクロックサイクルの間、使用可能である。
[00147]正確な電流読取り遅延の決定には、困難が伴い、および/もしくは資源が大量に使用されることがあるので、ならびに/または電流読取り遅延をかなり正確に推定することができるので、ブロック506は、この遅延を推定するにすぎない場合がある。他の遅延と比較すると、この遅延はかなり小さい場合がある。この遅延の推定は、たとえば、電流信号のサンプリングクロック周期に左右されることがある。たとえば、電流の読取りは即時に行ってもよいし、サンプリングクロックだけ遅延させてもよく、この読取りは、サンプリングクロックに左右されることがある。この遅延の平均は、たとえば、サンプリングクロックの2分の1とすることができる。
[00148]ブロック508では、電源スイッチ不感時間遅延を測定することができる。制御システムでは、電源スイッチング不感時間に関連する遅延が発生することがある。パルス幅変調生成モジュールが比較値に達すると、絶縁ゲートバイポーラトランジスタ(IGBT)スイッチが、不感時間の保護により、すぐにオンまたはオフにすることができないことがある。不感時間の影響を無視して、パルス幅変調ゼロカウンタ時点は、モータ117の実際の電流リプル波形の平均化時点に正確に対応する。しかし、不感時間の影響が無視できない場合がある。したがって、実際の電流リプルの平均化時点は、不感時間持続期間のおよそ半分などの、PWMゼロカウンタ時点からの時間遅延を有することができ、これにより、平均化電流検知時点の調整を必要とすることがある。
[00149]不感時間は、たとえば、正確な遅延を変えるために、IGBTコントローラなどのハードウェアまたはソフトウェアによって設定することができる。不感時間遅延は、測定してもよいし、設定ハードウェアおよび/またはソフトウェアから確認するだけでもよい。たとえば、不感時間遅延平均は、ハードウェアおよび/またはソフトウェアによって設定される不感時間の半分とすることができる。
[00150]ブロック502、504、506、および508は、図5では、その順序で実行されるように示されているが、他の方法では、これらのブロックのいずれも任意の順序で実行することができる。
[00151]ブロック510では、合計遅延を計算および/または生成することができる。この合計遅延は、たとえば、ブロック502、504、および508からの測定した遅延をまとめてブロック506の推定した遅延と加算することによって、計算することができる。これは、たとえば、データプロセッサ264などのプロセッサによって、一次処理モジュール114もしくは二次処理モジュール116のどちらか、または他の任意の内部もしくは外部のプロセッサもしくはモジュールによって行うことができる。合計遅延を取得する他の方法も可能とすることができる。
[00152]ブロック512では、計算した合計遅延を補償するように電流検知時点を調整することができる。たとえば、電流検知時点は、モータ117への信号を生成するために、PWM周期の開始後に、ある時間の長さ発生できる時点で発生するように設定することができ、この時間の長さは合計遅延に等しくすることができる。このようにして、電流検知時点は、制御システムで起こる可能性のある各遅延を適切に補正および/または補償するように設定することができる。
[00153]ブロック514では、次に、図4のブロック414と同様に、モータ117によって生成される電流信号から後続の電流検知時点を適切に測定するために電流検知時点を使用することができる。
[00154]電流検知時点を完全に設定するのは困難である、費用がかかる、および/または資源を大量に必要とすることがあるで、理想的および/または最良の電流検知時点からのいくらかの逸脱が許容可能な場合がある。たとえば、1マイクロ秒程度の遅延または前倒し(advancement)が許容できる場合がある。他の値および/または遅延が許容できる場合がある。さらに、電流検知時点を較正する前に適切なオフセットを電流変換器の読取り値に与えることが有用な場合があり、これにより、電流検知のオフセット誤差を除去することができる。
[00155]特定のインバータ設計に対して電流検知時点をチューニングすると、電流検知時点がハードウェア構成要素パラメータの変化に対してあまり変化しないことがある。さらに、電流調節コントローラ111で使用されるdq軸が不正確なために所望の値から生成したトルクが逸脱する場合など、電流検知と位置検知の非同期が存在する場合ですら、これは、電流検知時点が適切にチューニングされている限り、電流調整の大きさに直接的に影響しないことがある。したがって、いくつかのシステムでは、電流検知時点を一回チューニングすればよく、このチューニングは、制御システムの本格的な運転の前に実行される。
[00156]適切な電流検知時点を決定することに加えて、図1の制御システムの適切な機能も、モータ117の電流を測定するのに使用する電流変換器(CT)の適切な較正を必要とすることがある。特に、CT換算比と呼ぶこともある1つまたは複数のCT換算比を較正することが有益な場合がある。
[00157]CT換算係数は、たとえば、ルックアップテーブルに記憶することができ、このルックアップテーブルは、係数を電流変換器からの信号に適用するために使用することができる。このような係数は、たとえば、温度および電流の大きさなどのシステムの種々の影響を補償するために使用することができ、補償しない場合、不正確な電流信号および/または読取り値をもたらすことがある。
[00158]CT換算係数は一定でなくてもよく、むしろ、たとえば電流の大きさと共に変化してもよい。したがって、種々の電流の大きさに対するCT換算係数を使用してCTを較正することができ、このCT換算係数は、実際の電流の大きさを電流変換器によって測定するときに参照することができる。
[00159]電流変換器を較正する1つまたは複数の方法が存在する場合がある。たとえば、直流(DC)電流較正を使用して電流変換器を較正することができ、および/または交流(AC)電流較正を使用して電流変換器を較正することができる。他の例では、DC電流較正を使用して電流変換器を較正することができ、次に、その較正を、AC電流較正を使用して検証することができる。
[00160]たとえば、図6は、モータ117の適切な動作および/または制御を目的とした、電流変換器の較正ならびに/または測定した電流信号および/もしくは電流コマンドの調整に有用な換算係数(または換算比)を較正する1つの方法を示す。
[00161]図6の方法はブロック602で始まり、ブロック602では、既知のDC電流の大きさを特定することができる。DC電流較正では、直流(dc)電源は、モータ117および/または制御システムに取り付ける、接続する、結合する、および/または連通することができる。いくつかのシステムでは、dc電源は、500アンペア(A)まで、またはこれを超えるなどの、高電流制限機能を有することができる。他の電源も使用することができる。
[00162]ブロック604では、dc電源からのDC電流がモータ117および/または機械の巻線に流れるように指示することができる。
[00163]ブロック606では、実際の(フィードバック)電流は、高性能Danfysic電流変換器測定を使用して、または実際のdc電流を測定する分路抵抗器などを使用して、モータ117から測定することができる。
[00163]ブロック606では、実際の(フィードバック)電流は、高性能Danfysic電流変換器測定を使用して、または実際のdc電流を測定する分路抵抗器などを使用して、モータ117から測定することができる。
[00164]ブロック608では、インバータまたはコントローラのフィードバック電流を、dc電源から供給された実際のDC電流と比較することができる。
[00165]ブロック608での比較の結果、ブロック610では、換算係数または換算比を導出および/または計算することができる。この換算係数は、dc電源から供給されモータ117を通る実際の測定したDC電流の大きさに対応することができる。たとえば、換算係数は、受け取った実際のフィードバック電流に対する既知のDC電流の大きさであってもよいし、既知のDC電流の大きさに対する受け取った実際のフィードバック電流であってもよい。
[00165]ブロック608での比較の結果、ブロック610では、換算係数または換算比を導出および/または計算することができる。この換算係数は、dc電源から供給されモータ117を通る実際の測定したDC電流の大きさに対応することができる。たとえば、換算係数は、受け取った実際のフィードバック電流に対する既知のDC電流の大きさであってもよいし、既知のDC電流の大きさに対する受け取った実際のフィードバック電流であってもよい。
[00166]いくつかの方法では、既知のDC電流は、機械および/またはモータ117を反対方向に通ることもできる。いくつかのシステムでは、別の換算比を反対方向に計算することもできる。次に、所与のDC電流および/または測定した電流についての換算比を、換算比の平均を取ることによって計算することができる。これらのシステムおよび方法のうちのいくつかでは、図6の方法のブロックのいくつかまたはすべては、すべての電流に関して第1の方向で方法を完了した後で別々に繰り返してもよいし、指定のDC電流に対する換算係数を決定した直後にDC電流ごとに完了してもよい。
[00167]ブロック611では、ブロック610で生成された換算係数を、交流較正を使用して検証することができる。たとえば、45度という中程度のガンマ角などのあるガンマ角で特定の電流の大きさがモータ117に流れるように指示することができ、モータ117からの実際の平均3相電流を受け取ることができ、実際の平均3相電流をコマンド固有電流と比較することができる。また、またはあるいは、ブロック611は、以下で特定するAC電流較正手順に一致するように実行することができる。
[00168]ブロック611は、複数のシャフト速度で、および/または異なる電気周波数により、繰り返すことができる。ブロック611は、任意選択とすることができる。あるいは、以下で説明するように、この方法のブロック614の後で検証ブロック611を行うことができる。
[00169]ブロック612では、換算係数をルックアップテーブルに記憶することができる。このルックアップテーブルは、電子データ処理システム120、データプロセッサ264などのデータプロセッサ、および/または一次処理モジュール114、二次処理モジュール116、もしくは他の構成要素などの制御システムの種々の構成要素の一部である、連通する、接続する、取り付ける、および/または別の方法でリンクすることができる。記憶した換算係数は、モータ117または機械の巻線を流れる、コマンドを受けたDC電流の大きさに関連および/または従属することもできる。
[00170]ブロック614では、方法は、どこでルックアップテーブルが十分な数の換算係数エントリを有するかを確認するために見ることができる。たとえば、ルックアップテーブルは、ある一定の数のエントリを必要とすることがあり、または、DC電流のあらゆる追加アンペアに関するものなど、電流のあらゆる間隔に関するエントリを必要とすることがある。他の方法では、このブロックは、手動で実行することができ、および/または排除することができる。これらの方法のうちのいくつかでは、ブロック602は、むしろ、換算比の計算を必要とする場合がある既知のDC電流の大きさの完全なリストを含んでもよく、ブロック612は、その代わりに、そのリストをチェックして、換算比のすべてを計算したかどうかを確認するだけでもよい。
[00171]より多くの計算が必要な場合、方法は、ブロック618に移動することができる。方法のブロック604に移動することによって、別の既知のDC電流の大きさを使用して、換算係数を計算することができる。
[00172]上記で説明したDC電流換算処理は、1つまたは複数の異なる既知のDC電流を使用して、1回または複数回繰り返すことができる。換算係数は、異なる既知のDC電流および/またはモータ117からの測定した電流のそれぞれに対して収集することができる。
[00173]換算係数は、ルックアップテーブルなどのテーブルに記憶および/または入力することができる。このルックアップテーブルは、図1および2の電子データ処理システム120、データ記憶デバイス260、データプロセッサ264、ならびに/または制御システムの他の構成要素に記憶し、および/またはこれらによってアクセスすることができる。
[00174]図6の方法は、任意の商用タスクおよび/または指定のタスクにおいてモータ117の動作の前に実行することができる。ルックアップテーブルが完成した場合、方法はブロック616に移動することができる。ブロック616では、ルックアップテーブルを使用することができる。ルックアップテーブルは、たとえば、モータ117からの実際の測定した電流を受け取るまたはモータ117に適用される電流コマンドをチェックし、ルックアップテーブルからの換算比および/または換算係数を実際の測定した電流に適用し、調整した電流を取得することによって使用することができる。他の使用法も可能である。
[00175]その後、モータ117が動作中のときはいつでも、テーブル、データ、および/またはルックアップテーブルにアクセスすることができる。ルックアップテーブルのデータは、指定のCTからの読取り値を拡大縮小するために使用することができ、および/またはルックアップテーブルのデータに基づいてモータ117への入力を変えるために使用することができる。
[00176]制御システムおよび/またはモータ117と共に使用する電流変換器のそれぞれに対して、これらのプロセスを実行することができる。たとえば、モータ117が3相モータである場合、3つの電流変換器がモータ117と共に含まれることがある。電流変換器のそれぞれは、テーブルならびに/または換算データおよび換算比を含むことができ、これらは、その後、電流変換器に対して、または電流変換器からデータを適切に拡大縮小するために依拠することができる。たとえば、3相モータの相ごとに1つのセンサ115を使用してデータを検知することができる。このDC電流較正手順は、換算データを適切に決定および電流変換器に供給するのに十分なものとすることができる。
[00177]前述したように、ブロック611に示される、AC電流較正を使用してルックアップテーブル中の換算比を検証することは、ブロック614の後で行うこともできる。
[00178]AC電流較正は、主要な原動機を利用および/または必要とすることがある。この主要な原動機は、機械の基本速度などの一定のシャフト速度を維持することができる。既知の電流コマンドは、あるガンマ角で電流のある大きさを有することができ、次に、この既知の電流コマンドをモータ117に供給することができる。このガンマ角は、たとえば、45度とすることができる。
[00178]AC電流較正は、主要な原動機を利用および/または必要とすることがある。この主要な原動機は、機械の基本速度などの一定のシャフト速度を維持することができる。既知の電流コマンドは、あるガンマ角で電流のある大きさを有することができ、次に、この既知の電流コマンドをモータ117に供給することができる。このガンマ角は、たとえば、45度とすることができる。
[00179]モータ117の実際の平均化3相電流は、監視、検知、および/または別の方法で観測することができる。観測した電流は、コマンドを受けた値と比較することができる。この比較から、換算係数または換算比を取得、特定、計算、および/または決定することができる。AC電流較正を検証プロセスとして使用する場合、換算係数は、DC電流較正換算比と比較することができる。AC電流較正では、電流変換器のうちの1つに対するいずれか1つの特定のCT換算係数ではなく、3つの電流変換器すべてに対するCT換算係数を同時に調整することができる。さらに、いくつかのシステムでは、AC電流較正を実行する前に十分に小さなアンバランス率(unbalance percentage)を達成するために、適切なパルス幅変調スイッチング周波数および/またはPI利得を確実に慎重にチューニングすることが有用な場合がある。
[00180]前述したように、CT換算係数は、ルックアップテーブルなどのテーブルに記憶することができる。アナログ/デジタル変換器122から二次処理モジュール116に送信されるそれらの電流フィードバック信号などの、後続の3相電流フィードバックの読取り時に、電流フィードバックの読取り値をCT換算係数によって調整するおよび/またはCT換算係数を乗算することができる。これは、3相電流変換器が大きさに対して近い換算係数を有する場合に最良であることがある。
[00181]CTルックアップテーブルを使用する一例が図7の回路図に示されている。図7では、ブロック710においてd軸電流コマンドとq軸電流コマンドを結合し、ブロック715の式を使用して、CT換算ルックアップテーブル720への合計電流コマンド入力718を実現することができる。ブロック715の式は、以下のものとすることができる。
i*=平方根((id *)2+(iq *)2)
[00182]さらに、CT換算ルックアップテーブル720は、電流コマンドベクトル722およびCT換算ベクトル724も入力として受け取ることができる。これらのベクトル722および724は、種々の既知のDC電流の大きさに関連するので、CT換算係数に関する情報を含むことができる。たとえば、ベクトル722は、DC電流較正手順中に既知のDC電流の大きさを記憶することができ、および/またはベクトル734は、各dc電流の大きさで計算した対応する換算比を記憶することができる。他の構成も可能である。
[00182]さらに、CT換算ルックアップテーブル720は、電流コマンドベクトル722およびCT換算ベクトル724も入力として受け取ることができる。これらのベクトル722および724は、種々の既知のDC電流の大きさに関連するので、CT換算係数に関する情報を含むことができる。たとえば、ベクトル722は、DC電流較正手順中に既知のDC電流の大きさを記憶することができ、および/またはベクトル734は、各dc電流の大きさで計算した対応する換算比を記憶することができる。他の構成も可能である。
[00183]電流変換器換算係数730は、入力電流コマンド718に基づいて、CT換算ルックアップテーブル720から出力することができる。たとえば、CT換算ルックアップテーブル720への電流入力は、ルックアップテーブル中の情報と比較することができ、電流コマンドの大きさに基づいて、適切なCT換算係数を選択することができる。
[00184]相電流計算ブロック725は、適切なフィルタリング、処理などの後で、モータ117からの3相電流を計算するために使用することができる。たとえば、相計算ブロック725は、図1の二次処理モジュール116で実施するおよび/またはこれを備えることができる。
[00185]電流の3相のそれぞれは、相A電流727、相B電流728、および相C電流729と識別され、次に、CT換算係数730を乗算することができる。たとえば、乗算ブロック740では、相A電流727にCT換算係数730を乗算することができる。乗算ブロック741では、相B電流728にCT換算係数730を乗算することができる。乗算ブロック742では、相C電流729にCT換算係数730を乗算することができる。これらの結果は、個別に出力するおよび/またはブロック750で結合して出力760を得ることができる。
[00186]図7は、3相電流の3相すべてに対する1つのルックアップテーブルを示しているが、いくつかの他のシステムでは、相および/または電流変換器のそれぞれは、異なるルックアップテーブルを有することができる。たとえば、CTルックアップテーブル720は、乗算ブロック740で相A電流727に対する電流を乗算および/または調整するためにのみ使用することができるが、第2のCTルックアップテーブル(図示せず)は、相B電流に対する電流を乗算および/または調整するために使用することなどができる。CT換算ルックアップテーブルは、ブートブック(boot book)またはEEPROMに記憶される場合、比較を簡単にするためにコントローラに読み込むことができる。
[00187]電流検知時点を適切にチューニングした場合、上記で説明したDC/AC電流較正手順は、誤差1%以内などの、非常に正確な電流調節の大きさを達成することができる。これは、速度範囲全体を通じて種々の電流またはトルクレベルで可能にすることができる。
[00188]図8は、電流検知時点および/またはCT換算比を較正した後の、制御システム内のいくつかの電流検知構成要素の動作の一例を示す。
[00189]フィールドプログラマブルゲートアレイ870は、モータ117から電流を検知するために使用する外部アナログ/デジタル変換器880に取り付ける、接続する、結合する、および/または連通することができる。外部のアナログ/デジタル変換器880は、アナログ/デジタル変換器122であってもよいし、別のアナログ/デジタル変換器であってもよい。外部のアナログ/デジタル変換器880は、電流信号を連続的に検知することができ、この検知した電流信号から連続ストリームまたはデジタルサンプルおよび/もしくは信号のセットを生成することができ、これは、フィールドプログラマブルゲートアレイ870に送信することができる。たとえば、外部アナログ/デジタル変換器に対するサンプリング速度は、1〜2マイクロ秒ごとに新しいサンプルを生成することができる。アナログ/デジタル変換器880は、図8では外部にあるように示されているが、フィールドプログラマブルゲートアレイ870は、代わりに内部のアナログ/デジタル変換器を有することができる。
[00189]フィールドプログラマブルゲートアレイ870は、モータ117から電流を検知するために使用する外部アナログ/デジタル変換器880に取り付ける、接続する、結合する、および/または連通することができる。外部のアナログ/デジタル変換器880は、アナログ/デジタル変換器122であってもよいし、別のアナログ/デジタル変換器であってもよい。外部のアナログ/デジタル変換器880は、電流信号を連続的に検知することができ、この検知した電流信号から連続ストリームまたはデジタルサンプルおよび/もしくは信号のセットを生成することができ、これは、フィールドプログラマブルゲートアレイ870に送信することができる。たとえば、外部アナログ/デジタル変換器に対するサンプリング速度は、1〜2マイクロ秒ごとに新しいサンプルを生成することができる。アナログ/デジタル変換器880は、図8では外部にあるように示されているが、フィールドプログラマブルゲートアレイ870は、代わりに内部のアナログ/デジタル変換器を有することができる。
[00190]本明細書においてフィールドプログラマブルゲートアレイ870を参照するが、この構成要素は、いくつかのシステムでは、複合プログラマブルロジックデバイス(CPLD)などの別のタイプのデジタル記憶および/またはコンピューティングデバイスであってもよいことを理解されたい。
[00191]フィールドプログラマブルゲートアレイ870は、外部アナログ/デジタル変換器880からデジタル電流サンプルを連続的に受け取ることができる。フィールドプログラマブルゲートアレイ870は、たとえばバッファ890を含むことができ、バッファ890は、アナログ/デジタル変換器880から受け取ったデジタル電流サンプルを記憶するために使用することができる。
[00192]さらに、またはあるいは、フィールドプログラマブルゲートアレイ870は、1つまたは複数のフィルタを含むことができる。たとえば、フィールドプログラマブルゲートアレイ870は、受け取った電流信号からノイズをフィルタリングするために使用できるFIRフィルタを有することができる。
[00193]デジタル信号プロセッサ850は、フィールドプログラマブルゲートアレイ870に取り付ける、接続する、結合する、および/または連通することができる。デジタル信号プロセッサ850は、たとえば、較正した電流検知時点に関連するデータにアクセスおよび/または記憶することができる。たとえば、デジタル信号プロセッサ850は、遅延および/もしくは電流信号に関連するデータを有することができ、ならびに/または信号810などの、生成モジュール112によって生成されたPWM搬送波信号を監視することができる。
[00194]生成モジュール112から受け取ったPWM搬送波信号、ならびに電流検知時点についてのデータに従って、デジタル信号プロセッサ850は、受け取った電流信号をサンプリングするべき適切な時点を計算、推定、識別、および/または別の方法で決定することができる。この適切な時点は、デジタル信号プロセッサ850の中の点線806および点線808として示すことができる。この決定に従って、デジタル信号プロセッサは、デジタルパルス830を生成および/またはフィールドプログラマブルゲートアレイ870に送ることができる。デジタルパルス830は、検知した電流信号から電流値をラッチするべき電流検知時点を示すことができる。デジタルパルス830は、立ち上がりエッジによってトリガされるデジタルパルスとすることができ、および/または最良のおよび/または較正した電流検知時点を表すことができる。デジタルパルス830の立ち上がりエッジまたは立ち下がりエッジは、検知した電流信号の平均化点に対応するように構成することができる。デジタルパルス830は、電流信号のセットから電流値手がかりを提供するように、またはラッチするように構成することができ、したがって、電流の上昇または低下するスロープの平均化点に対応する。
[00195]デジタル信号プロセッサ850は、デジタルパルス830をいくつかの方法で生成することができる。たとえば、デジタル信号プロセッサ850は、6つものPWMモジュールまたはPWM生成器を含むおよび/または使用することができる。いくつかのデジタル信号プロセッサ850では、これらのPWM生成器のうちの3つを、相A電圧信号、相B電圧信号、および相C電圧信号などの、モータ117に送信するべき電圧信号またはパルスを生成するために使用することができる。信号810は、たとえば、これらの3つのPWM生成器によって生成される3つのPWM搬送波信号の組合せを表すことができる。
[00196]さらに、またはあるいは、パルス820などのアップカウント(アップカウント)搬送波信号を生成する予備PWM生成モジュール。いくつかのシステムでは、デジタルパルス820を生成するためにエンハンスドキャプチャ(eCap)モジュールなどの他の予備DSP構成要素を使用することも可能である。アップカウント搬送波信号は、たとえば、図8において点線802および804で示される、3相生成信号810に対応するゼロ点、低点、または期間点(period point)で開始できる周期を有することができる。予備PWMモジュール搬送波信号820は、相A、B、およびCに対する搬送波信号810を生成する他の3つのPWMモジュールと同期することができる。電流検知時点は、デジタル信号プロセッサ850においていくつかの方法で計算および/または記憶することができる。たとえば、デジタル信号プロセッサ850は、アップカウントパルス820の開始後にデジタルパルス830を指定のカウント、または時間生成できるように構成することができる。この時間は、たとえば、遅延809によって表すことができる。アップカウント搬送波信号820の開始と電流検知時点の間の遅延809を調整することによって、デジタル信号プロセッサは、最良の電流検知時点に対応するデジタルパルス830を適切に生成するために容易に較正することができる。
[00197]デジタル信号プロセッサ850から送られたデジタルパルス830を受け取ると、フィールドプログラマブルゲートアレイ870は、その時点で外部アナログ/デジタル変換器から送信された3相電流をラッチ、カタログ化、文書化、および/または別の方法で識別することができる。具体的には、フィールドプログラマブルゲートアレイ870は、デジタルパルスの立ち上がりエッジまたは立ち下がりエッジによって示される電流検知時点で連続的に検知およびフィルタリングした電流信号から3相電流値のセットをラッチするように構成することができる。このラッチした3相電流値セットは、たとえば、デジタルパルス830を受け取った時点におけるフィールドプログラマブルゲートアレイ870のバッファ内の相電流値の最新のセットとすることができる。
[00198]次に、このラッチした3相電流信号895は、デジタル信号プロセッサ850に送信する、送る、与える、および/または別の方法で送信することができる。デジタル信号プロセッサ850は、受け取った3相電流信号895を処理することができる。たとえば、デジタル信号プロセッサ850は、受け取った3相信号に対してパーク変換または他の相変換を実行することができ、その結果、d軸電流信号およびq軸電流信号を生成することができる。変換を実行した後、デジタル信号プロセッサ850は、結果として生成される2相電流信号を電流調節コントローラ111などに送信する、与える、送る、および/または別の方法で出力することができる。
[00199]あるいは、信号の変換は、フィールドプログラマブルゲートアレイ870内で、および/またはこれによって実行することができる。
[00200]図8は、1つの外部アナログ/デジタル変換器880を示しているが、これより多くの外部アナログ/デジタル変換器が存在してもよい。たとえば、制御システムは、3つの外部アナログ/デジタル変換器を使用することができ、この変換器のそれぞれは3相電流の相の1つを対象とする。これに似たシステムでは、フィールドプログラマブルゲートアレイ870は、外部アナログ/デジタル変換器のそれぞれから受け取った記憶したデジタル電流サンプルから検知した3相電流のうちの1相をラッチすることができる。他の構成も可能である。
[00200]図8は、1つの外部アナログ/デジタル変換器880を示しているが、これより多くの外部アナログ/デジタル変換器が存在してもよい。たとえば、制御システムは、3つの外部アナログ/デジタル変換器を使用することができ、この変換器のそれぞれは3相電流の相の1つを対象とする。これに似たシステムでは、フィールドプログラマブルゲートアレイ870は、外部アナログ/デジタル変換器のそれぞれから受け取った記憶したデジタル電流サンプルから検知した3相電流のうちの1相をラッチすることができる。他の構成も可能である。
[00201]いくつかのシステムでは、フィールドプログラマブルゲートアレイ870とデジタル信号プロセッサ850の一方または両方は、二次処理モジュール116の構成要素とすることができる。他のシステムでは、フィールドプログラマブルゲートアレイ870とデジタル信号プロセッサ850の一方または両方は、電子データ処理システム120の構成要素とすることができる。他のシステムでは、他の構成も可能とすることができる。
[00202]好ましい実施形態について説明してきたが、添付の特許請求の範囲において定義される本発明の範囲から逸脱することなく、種々の変更を加えることができることは明らかであろう。
Claims (25)
- 電流信号のセットから電流値をラッチする電流検知時点を較正する方法であって、
あるシャフト速度において動力モードでモータが動作しているとき、前記モータを制御するために、あるガンマ角である大きさを含む電流コマンドを与えるステップと、
前記モータが同じシャフト速度において制動モードで動作しているとき、前記モータを制御するために、同じガンマ角で同じ大きさを含む電流整合コマンドを与えるステップと、
前記モータが前記電流コマンドによって制御され、前記動力モードで動作しているとき、前記モータの3相電流の第1の実際の平均化rms電流の大きさを監視するステップと、
前記モータが前記電流整合コマンドによって制御され、前記制動モードで動作しているとき、前記モータの前記3相電流の第2の実際の平均化rms電流の大きさを監視するステップと、
前記動力モードで観測した第1の実際の平均化rms電流の大きさが、前記制動モードで観測した第2の実際の平均化rms電流の大きさと等しくなるまで、電流検知時点を調整するステップと
を含む方法。 - 請求項1に記載の方法であって、前記モータの3相電流の実際の平均化rms電流の大きさが連続的に検知される、方法。
- 請求項2に記載の方法であって、前記電流検知時点がパルス幅変調周期ごとに調整される、方法。
- 請求項1に記載の方法であって、前記動力モードが、前記モータが電力源から電力を受け取っている動作のモードを表し、前記制動モードが、前記モータが前記電力源に電力を供給している動作のモードを表す、方法。
- 請求項1に記載の方法であって、前記電流検知時点が電流の上昇または低下するスロープの平均化点に対応するように、電流信号の前記セットから電流値をラッチするように前記電流検知時点は構成された、方法。
- モータから検知した電流信号を処理するためのシステムであって、
検知した電流信号から電流値をラッチするべき電流検知時点を示すデジタルパルスを生成するためのデジタル信号プロセッサであって、前記デジタルパルスの立ち上がりエッジまたは立ち下がりエッジが、前記検知した電流信号の平均化点に対応するように構成された、デジタル信号プロセッサと、
連続的に検知した3相電流信号を受け、前記デジタル信号プロセッサから前記デジタルパルスを受けるためのフィールドプログラマブルゲートアレイであって、前記デジタルパルスの前記立ち上がりエッジまたは前記立ち下がりエッジによって示される前記電流検知時点で、連続的に検知した前記電流信号から3相電流値のセットをラッチし、ラッチした前記3相電流値を前記デジタル信号プロセッサに送るように構成されたフィールドプログラマブルゲートアレイと
を備えたシステム。 - 請求項6に記載のシステムであって、前記デジタル信号プロセッサが、d軸電流信号およびq軸電流信号を生成するためにラッチした前記3相電流値に対してパーク変換を実行するように構成された、システム。
- 請求項7に記載のシステムであって、前記デジタル信号プロセッサから前記d軸電流信号および前記q軸電流信号を受けるように構成された電流調節コントローラをさらに備えたシステム。
- 請求項6に記載のシステムであって、前記デジタル信号プロセッサが、前記デジタルパルスの生成専用のパルス幅変調生成器を備えた、システム。
- 請求項6に記載のシステムであって、前記フィールドプログラマブルゲートアレイが、外部アナログ/デジタル変換器および検知回路、または内部アナログ/デジタル変換器および検知回路のいずれかから、連続的に検知した前記3相電流信号を受ける、システム。
- 請求項6に記載のシステムであって、前記フィールドプログラマブルゲートアレイが、連続的に検知した前記3相電流信号をフィルタリングするフィルタを含む、システム。
- 機械コントローラのためのインバータ電流変換器を較正する方法であって、
機械の巻線に既知のDC電流が流れるよう指示するステップと、
前記機械コントローラからフィードバック電流を受けるステップと、
前記フィードバック電流を前記既知のDC電流と比較するステップと、
前記フィードバック電流と前記既知のDC電流との比較に基づいて換算比を計算するステップと、
各回で異なる既知のDC電流の大きさを使用して、コマンドを行う前記ステップ、受ける前記ステップ、比較する前記ステップ、および計算する前記ステップを複数回繰り返すステップと、
前記既知のDC電流の大きさに対する計算した前記換算比を含むルックアップテーブルを生成するステップと
を含む方法。 - 請求項12に記載の方法であって、計算した前記換算比が、3相モータの相ごとに別々に較正され、記憶される、方法。
- 請求項12に記載の方法であって、指示する前記ステップ、受ける前記ステップ、比較する前記ステップ、計算する前記ステップ、繰り返す前記ステップ、および生成する前記ステップが、前記機械の指定した動作の前に実行され、前記機械の前記指定した動作中に、前記機械の測定した電流の大きさが、前記ルックアップテーブルに記憶される対応する換算比によって調整される、方法。
- 請求項12に記載の方法であって、第1の方向において前記機械の巻線に前記既知のDC電流が流れるように指示され、前記方法が、
前記第1の方向と反対の第2の方向において前記機械の巻線に前記既知のDC電流が流れるよう指示するステップと、
前記機械コントローラから第2のフィードバック電流を受けるステップと、
前記第2のフィードバック電流を前記既知のDC電流と比較するステップと、
前記第2のフィードバック電流と前記既知のDC電流との比較に基づいて第2の換算比を計算するステップと
をさらに含む、方法。 - 請求項12に記載の方法であって、AC電流を使用して前記換算比を検証するステップをさらに含む方法。
- 請求項16に記載の方法であって、換算比を検証する前記ステップが、機械を流れる、中程度のガンマ角での特定の電流の大きさのコマンドを行うステップと、前記機械から実際の平均3相電流を受けるステップと、前記実際の平均3相電流を指示された前記特定の電流の大きさと比較するステップとを含む、方法。
- 請求項17に記載の方法であって、検証する前記ステップを複数のシャフト速度において異なる電気周波数で繰り返すステップをさらに含む方法。
- 電流信号を受けることおよび処理することに関連する時間遅延を計算する方法であって、
ハードウェア回路相遅延を測定するステップと、
電流サンプルの処理またはフィルタリングの遅延を測定するステップと、
電流読取り遅延を推定するステップと、
電源スイッチ不感時間遅延を測定するステップと、
連続的に検知した電流信号のバッファから電流値をラッチするために使用する電流検知時点を調整するステップであって、調整が、測定した前記ハードウェア相遅延、測定した前記電流サンプル処理遅延、推定した前記電流読取り遅延、および測定した前記電源スイッチ不感時間遅延からの合計遅延に基づく、ステップと
を含む方法。 - 請求項19に記載の方法であって、前記電流読取り遅延が、アナログ/デジタル変換器からフィールドプログラマブルゲートアレイへの電流サンプル読取りによる遅延と、並列バスを介したフィールドプログラマブルゲートアレイからデジタル信号プロセッサへのラッチした電流値を送ることによる遅延とを含む、方法。
- 請求項20に記載の方法であって、前記電流読取り遅延を前記電流信号のサンプリングクロック周期に基づいて推定する、方法。
- 請求項19に記載の方法であって、前記ハードウェア相遅延が、モータに結合された電流変換器、ローパスアンチエイリアシングフィルタ、アナログ信号のオフセットおよび換算調整のための演算増幅器、またはアナログ/デジタル変換器の遅延のうちの少なくとも1つから生じる、方法。
- 請求項22に記載の方法であって、前記ハードウェア相遅延が、モータによって直接的に出力された第1の信号を、前記モータによって出力され、フィールドプログラマブルゲートアレイに送られる直前の第2の信号と比較することにより求められる、方法。
- 請求項19に記載の方法であって、前記電流サンプル処理遅延が、一連のサンプリングした電流信号のデジタルフィルタリングからの相遅延を含む、方法。
- 請求項19に記載の方法であって、前記電源スイッチ不感時間遅延が、電源スイッチの不感時間に基づいて測定される、方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/036,966 | 2011-02-28 | ||
| US13/036,966 US8531141B2 (en) | 2011-02-28 | 2011-02-28 | System for calibrating an electrical control system |
| PCT/US2012/022824 WO2012118578A2 (en) | 2011-02-28 | 2012-01-27 | System for calibrating an electrical control system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014507108A true JP2014507108A (ja) | 2014-03-20 |
Family
ID=46718515
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013556627A Pending JP2014507108A (ja) | 2011-02-28 | 2012-01-27 | 電気的制御システムを較正するためのシステム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8531141B2 (ja) |
| EP (2) | EP3345807B1 (ja) |
| JP (1) | JP2014507108A (ja) |
| CN (1) | CN103402855B (ja) |
| AU (1) | AU2012223675A1 (ja) |
| BR (1) | BR112013022026B1 (ja) |
| WO (1) | WO2012118578A2 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8779705B2 (en) * | 2011-02-25 | 2014-07-15 | Deere & Company | Synchronization of position and current measurements in an electric motor control application using an FPGA |
| US8519648B2 (en) * | 2011-07-22 | 2013-08-27 | GM Global Technology Operations LLC | Temperature compensation for improved field weakening accuracy |
| US8941342B2 (en) * | 2011-08-26 | 2015-01-27 | Mitsubishi Electric Corp. | Integrated servo system |
| CN202404169U (zh) * | 2011-12-19 | 2012-08-29 | 哈尔滨九洲电气股份有限公司 | 串联叠加电压型的高压变频器的低压测试装置 |
| CN104106209B (zh) * | 2012-02-22 | 2016-10-05 | 株式会社安川电机 | 电动机的磁极位置估计装置、电动机的控制装置及电动机的磁极位置估计方法 |
| US9270223B2 (en) | 2013-04-12 | 2016-02-23 | Deere & Company | Methods of determining machine terminal voltage and systems thereof |
| US9071186B2 (en) * | 2013-04-12 | 2015-06-30 | Deere & Company | Method and apparatus for controlling an alternating current machine |
| KR102096050B1 (ko) * | 2013-08-16 | 2020-04-02 | 삼성디스플레이 주식회사 | 유기 발광 표시 장치 검사 장치 및 유기 발광 표시 장치 검사 방법 |
| US10158310B2 (en) * | 2014-06-23 | 2018-12-18 | Shanghai Baicheng Electric Equipment Manufacture Co., Ltd. | Electronic switch and electronic device |
| CN104167970B (zh) * | 2014-07-28 | 2017-09-05 | 南京铁道职业技术学院 | 可视化监控反电势的永磁同步电机矢量控制系统及方法 |
| CN104166039B (zh) * | 2014-07-28 | 2017-11-10 | 南京铁道职业技术学院 | 基于可视化的永磁同步电机定子电流检测系统及方法 |
| CN104166040B (zh) * | 2014-07-28 | 2017-11-10 | 南京铁道职业技术学院 | 两相变换下的永磁同步电机定子电压检测系统及方法 |
| US9903917B2 (en) | 2014-10-07 | 2018-02-27 | Texas Instruments Incorporated | Method and circuitry for detecting faults in field oriented controlled permanent magnet synchronous machines |
| DE102014220208A1 (de) * | 2014-10-07 | 2016-05-25 | Robert Bosch Gmbh | Steuervorrichtung für eine elektromaschine, fahrzeug und verfahren |
| JP6513715B2 (ja) * | 2015-02-06 | 2019-05-15 | 日立オートモティブシステムズ株式会社 | 電流センサ |
| WO2016132509A1 (ja) * | 2015-02-19 | 2016-08-25 | 三菱電機株式会社 | インバータ制御装置及び空気調和機 |
| CN104897414A (zh) * | 2015-06-10 | 2015-09-09 | 安徽安凯汽车股份有限公司 | 一种测量电涡流缓速器综合性能的测试系统及测试方法 |
| CN105429634B (zh) * | 2015-09-16 | 2018-02-23 | 北京京东方能源科技有限公司 | 单相锁相控制方法和装置 |
| KR102493847B1 (ko) * | 2015-10-07 | 2023-01-30 | 엘지전자 주식회사 | 모터 구동장치 및 이를 구비하는 홈 어플라이언스 |
| CN107437914B (zh) * | 2016-05-27 | 2020-08-14 | 乐星产电(无锡)有限公司 | 主轴马达高速准停的控制方法及控制装置 |
| CN105870946A (zh) * | 2016-06-06 | 2016-08-17 | 广州开能电气实业有限公司 | 一种三相不平衡调整装置的控制器 |
| KR20180057141A (ko) * | 2016-11-22 | 2018-05-30 | 현대자동차주식회사 | 계자권선형 모터 제어 시스템 및 방법 |
| NL2018212B1 (en) * | 2017-01-23 | 2018-07-30 | Mci Mirror Controls Int Netherlands B V | control module for adjusting flaps of a vehicle |
| CN107161209B (zh) * | 2017-05-13 | 2019-01-18 | 浙江仕善汽车科技股份有限公司 | 汽车电动助力转向系统电机角度计算方法 |
| CN110758543B (zh) * | 2018-07-26 | 2022-03-18 | 比亚迪股份有限公司 | 转向管柱的位置检测方法、装置、存储介质及车辆 |
| JP7449471B2 (ja) * | 2020-06-08 | 2024-03-14 | 株式会社ジェイテクト | モータ制御装置 |
| KR102286929B1 (ko) * | 2020-10-20 | 2021-08-09 | 한국해양과학기술원 | 전동기 또는 발전기의 전류를 결정하는 방법 및 디바이스 |
| CN112398406B (zh) * | 2020-10-30 | 2022-04-01 | 深圳拓邦股份有限公司 | 一种电机运行控制方法、装置、存储介质及电子设备 |
| CN112688615B (zh) * | 2020-12-25 | 2022-06-17 | 绍兴市上虞区武汉理工大学高等研究院 | 一种基于人工智能的交流伺服驱动方法及装置 |
| US11923795B2 (en) | 2022-02-15 | 2024-03-05 | Haier Us Appliance Solutions, Inc. | System and method for voltage calibration |
| CN117081442A (zh) * | 2022-05-09 | 2023-11-17 | 开利公司 | 用于控制异步感应电机的方法、控制装置和电机系统 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4023083A (en) | 1975-04-14 | 1977-05-10 | General Electric Company | Torque regulating induction motor system |
| US4453116A (en) * | 1983-10-05 | 1984-06-05 | General Electric Company | Scalar decoupled control for an induction machine using current control |
| US4814677A (en) | 1987-12-14 | 1989-03-21 | General Electric Company | Field orientation control of a permanent magnet motor |
| US5053688A (en) * | 1989-03-07 | 1991-10-01 | Sundstrand Corporation | Feedback circuit for eliminating DC offset in drive current of an AC motor |
| US5196775A (en) | 1991-02-20 | 1993-03-23 | Honeywell Inc. | Switched reluctance motor position by resonant signal injection |
| US5287051A (en) | 1992-02-14 | 1994-02-15 | General Electric Company | Method and apparatus for improved efficiency in a pulse-width-modulated alternating current motor drive |
| US5450306A (en) * | 1992-12-07 | 1995-09-12 | Square D Company | Closed loop pulse width modulator inverter with volt-seconds feedback control |
| US5428283A (en) | 1994-05-26 | 1995-06-27 | Alliedsignal Inc. | Power factor control of pulse width modulated inverter supplied permanent magnet motor |
| US5473241A (en) | 1994-07-26 | 1995-12-05 | Allen-Bradley Company, Inc. | Method and apparatus for RMS measurements in induction motor without sampling |
| US5525887A (en) | 1995-03-14 | 1996-06-11 | A. O. Smith Corporation | Switched reluctance motor providing rotor position detection at low speeds without a separate rotor shaft position sensor |
| JPH0966851A (ja) | 1995-08-31 | 1997-03-11 | Mitsubishi Electric Corp | 車両用制御装置 |
| US5903128A (en) * | 1996-02-01 | 1999-05-11 | Denso Corporation | Sensorless control system and method of permanent magnet synchronous motor |
| US5747971A (en) * | 1996-08-08 | 1998-05-05 | Sundstrand Corporation | Position and velocity sensorless control for a motor generator system operated as a motor using exciter impedance |
| US5914582A (en) | 1997-01-27 | 1999-06-22 | Hitachi, Ltd. | Permanent magnet synchronous motor controller and electric vehicle controller |
| US6043995A (en) * | 1998-09-09 | 2000-03-28 | Centrilift | Method and apparatus for pulse width modulation of a power supply for increased transient stability in subsurface wellbore pumps |
| DE10037972B4 (de) * | 1999-08-05 | 2005-09-15 | Sharp K.K. | Vorrichtung und Verfahren zur Elektromotorsteuerung |
| JP4245777B2 (ja) | 2000-05-25 | 2009-04-02 | 三菱電機株式会社 | 誘導電動機の制御装置および制御方法 |
| US6549871B1 (en) * | 2001-05-03 | 2003-04-15 | Delphi Technologies, Inc. | Current estimation for an electric machine |
| US6737828B2 (en) * | 2001-07-19 | 2004-05-18 | Matsushita Electric Industrial Co., Ltd. | Washing machine motor drive device |
| US6605918B2 (en) | 2001-08-31 | 2003-08-12 | Siemens Energy & Automation | System and method for compensating the reading of noncontinuous AC sinusoidal currents |
| JP4370754B2 (ja) | 2002-04-02 | 2009-11-25 | 株式会社安川電機 | 交流電動機のセンサレス制御装置および制御方法 |
| GB0213098D0 (en) | 2002-06-07 | 2002-07-17 | Trw Ltd | Motor control device |
| US7157878B2 (en) | 2002-11-19 | 2007-01-02 | Delphi Technologies, Inc. | Transient compensation voltage estimation for feedforward sinusoidal brushless motor control |
| JP3661689B2 (ja) | 2003-03-11 | 2005-06-15 | トヨタ自動車株式会社 | モータ駆動装置、それを備えるハイブリッド車駆動装置、モータ駆動装置の制御をコンピュータに実行させるプログラムを記録したコンピュータ読取り可能な記録媒体 |
| US20060043923A1 (en) * | 2004-08-31 | 2006-03-02 | Baker Donal E | Performance enhancement for motor field oriented control system |
| US8190381B2 (en) | 2005-01-27 | 2012-05-29 | Electro Industries/Gauge Tech | Intelligent electronic device with enhanced power quality monitoring and communications capabilities |
| US7733044B2 (en) | 2005-02-24 | 2010-06-08 | Mitsubishi Heavy Industries, Ltd. | IPM motor system and control method thereof |
| US7808201B2 (en) * | 2005-06-09 | 2010-10-05 | International Rectifier Corporation | Sensorless field oriented controller for two-phase motor |
| US7339344B2 (en) * | 2005-08-25 | 2008-03-04 | International Rectifier Corporation | Self tuning method and apparatus for permanent magnet sensorless control |
| WO2008013578A2 (en) * | 2006-02-03 | 2008-01-31 | Bae Systems Land & Armaments L.P. | High speed motor control |
| US7508086B2 (en) * | 2006-03-24 | 2009-03-24 | General Electric Company | Aircraft engine starter/generator and controller |
| JP4759422B2 (ja) | 2006-03-27 | 2011-08-31 | 日立アプライアンス株式会社 | 電力変換器システム、および、それを利用した洗濯機 |
| FR2901928B1 (fr) * | 2006-05-31 | 2008-09-05 | Valeo Equip Electr Moteur | Procede et dispositif de generation de signaux de commande d'une machine electrique tournante polyphasee en fonction de la vitesse |
| JP5103299B2 (ja) * | 2008-06-27 | 2012-12-19 | 株式会社日立産機システム | 電力変換装置 |
| EP2335347A1 (en) | 2008-09-23 | 2011-06-22 | Aerovironment inc. | Sensorless optimum torque control for high efficiency ironless permanent magnet machine |
| US8084986B2 (en) * | 2009-12-28 | 2011-12-27 | Delta Electronics, Inc. | Dead-time compensation apparatus of PWM inverter and method thereof |
-
2011
- 2011-02-28 US US13/036,966 patent/US8531141B2/en active Active
-
2012
- 2012-01-27 CN CN201280010850.9A patent/CN103402855B/zh active Active
- 2012-01-27 EP EP18152668.2A patent/EP3345807B1/en active Active
- 2012-01-27 JP JP2013556627A patent/JP2014507108A/ja active Pending
- 2012-01-27 BR BR112013022026-0A patent/BR112013022026B1/pt active IP Right Grant
- 2012-01-27 EP EP12752392.6A patent/EP2681099B1/en active Active
- 2012-01-27 WO PCT/US2012/022824 patent/WO2012118578A2/en active Application Filing
- 2012-01-27 AU AU2012223675A patent/AU2012223675A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012118578A2 (en) | 2012-09-07 |
| BR112013022026B1 (pt) | 2021-06-08 |
| US8531141B2 (en) | 2013-09-10 |
| EP2681099B1 (en) | 2020-10-07 |
| US20120217915A1 (en) | 2012-08-30 |
| WO2012118578A3 (en) | 2013-06-13 |
| CN103402855B (zh) | 2016-02-03 |
| EP3345807B1 (en) | 2020-12-16 |
| EP3345807A1 (en) | 2018-07-11 |
| AU2012223675A1 (en) | 2013-09-12 |
| EP2681099A2 (en) | 2014-01-08 |
| CN103402855A (zh) | 2013-11-20 |
| BR112013022026A2 (pt) | 2016-11-29 |
| EP2681099A4 (en) | 2018-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2681099B1 (en) | Method for calibrating an electrical control system | |
| US8450962B2 (en) | System for controlling a motor | |
| CN103404009B (zh) | 用于校准电动机的转子位置偏移量的方法和系统 | |
| US8624531B2 (en) | Method and system for evaluating electrical connections between a motor controller and motor | |
| KR100790914B1 (ko) | 회전 전자기 장치에서 토르크 불규칙성을 능동적으로감소시키는 방법 및 장치 | |
| CN103931096B (zh) | 用温度补偿控制电动机的方法和系统 | |
| US8810169B2 (en) | Method and system for estimating rotor angle of an electric machine | |
| US8744794B2 (en) | Method and apparatus for characterizing an interior permanent magnet machine | |
| US8723460B2 (en) | Method and system for controlling an electric motor with compensation for time delay in position determination | |
| JP5277787B2 (ja) | 同期モータ駆動制御装置 | |
| JP2014506779A (ja) | 位置決定において時間遅延に対する補償を用いて電気モータを制御するための方法およびシステム | |
| JP2014509822A (ja) | 埋込永久磁石機械を制御するための埋込永久磁石機械システムおよび方法 | |
| JP2005522171A (ja) | 永久磁石式電気モーターを制御するためのシステム及び方法 | |
| JP6827358B2 (ja) | モータの試験装置 | |
| JP2022150152A (ja) | 制御装置、制御プログラム及び制御方法 |