JP2014197842A - 複数の撮影画像を用いてパターンのステッチおよびデコードするシステムおよび方法 - Google Patents
複数の撮影画像を用いてパターンのステッチおよびデコードするシステムおよび方法 Download PDFInfo
- Publication number
- JP2014197842A JP2014197842A JP2014048260A JP2014048260A JP2014197842A JP 2014197842 A JP2014197842 A JP 2014197842A JP 2014048260 A JP2014048260 A JP 2014048260A JP 2014048260 A JP2014048260 A JP 2014048260A JP 2014197842 A JP2014197842 A JP 2014197842A
- Authority
- JP
- Japan
- Prior art keywords
- symbol
- image
- binary matrix
- symbol data
- data area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/14—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation using light without selection of wavelength, e.g. sensing reflected white light
- G06K7/1404—Methods for optical code recognition
- G06K7/146—Methods for optical code recognition the method including quality enhancement steps
- G06K7/1491—Methods for optical code recognition the method including quality enhancement steps the method including a reconstruction step, e.g. stitching two pieces of bar code together to derive the full bar code
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/14—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation using light without selection of wavelength, e.g. sensing reflected white light
- G06K7/1404—Methods for optical code recognition
- G06K7/1408—Methods for optical code recognition the method being specifically adapted for the type of code
- G06K7/1417—2D bar codes
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Toxicology (AREA)
- Health & Medical Sciences (AREA)
- Electromagnetism (AREA)
- General Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Quality & Reliability (AREA)
- Studio Devices (AREA)
- Image Analysis (AREA)
Abstract
Description
Claims (18)
- シンボルの画像を用いて前記シンボルをデコードするシステムであって、
第1シンボルデータ領域を含む第1画像、および第2シンボルデータ領域を含む第2画像を取得する画像デバイスと、
前記画像デバイスに動作可能に連結され、データステッチアルゴリズムを実行するプロセッサと、を備え、
前記データステッチアルゴリズムによって、前記第1シンボルデータ領域が第1バイナリマトリクスに、前記第2シンボルデータ領域が第2バイナリマトリクスにそれぞれ変換され、前記第1バイナリマトリクスが前記第2バイナリマトリクスに累積されて、前記シンボルを表わすデコード可能な累積バイナリマトリクスが生成される
ことを特徴とするシステム。 - 前記第1画像が第1取得パラメータセットを用いて取得され、前記第2画像が第2パラメータセットを用いて取得され、前記第2取得パラメータセットが前記第1取得パラメータセットと異なるものとされることを特徴とする請求項1に記載のシステム。
- 前記第1シンボルデータ領域および前記第2シンボルデータ領域が重なっていることを特徴とする請求項1に記載のシステム。
- 前記第1シンボルデータ領域および前記第2シンボルデータ領域の少なくとも1つの一部分が破損しデコード不能とされることを特徴とする請求項1に記載のシステム。
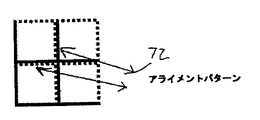
- 前記累積バイナリマトリクスに、少なくとも1つのパターン認識機能が含まれることを特徴とする請求項1に記載のシステム。
- 前記第1シンボルデータ領域に第1位置および第1スケールが含まれ、前記第2シンボルデータ領域に第2位置および第2スケールが含まれ、前記第2位置および前記第2スケールが前記第1位置および前記第1スケールと相違し、
前記データステッチアルゴリズムによって、前記第1位置、前記第1スケール、前記第2位置、および前記第2スケールを関連付ける対応がさらに生成されることを特徴とする請求項1に記載のシステム。 - 前記第1画像に第1極性が含まれ、前記第2画像に前記第1極性と異なる第2極性が含まれることを特徴とする請求項1に記載のシステム。
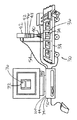
- 機械読み取り可能シンボルの第1画像および後続画像の間の対応を確立するシステムにおいて、
前記第1画像および前記後続画像を取得する画像化デバイスであって、
前記第1画像には第1シンボルデータ領域が含まれ、前記後続画像には後続シンボルデータ領域が含まれ、
前記第1シンボルデータ領域には第1位置および第1スケールが含まれ、前記後続シンボルデータ領域には第2位置および第2スケールが含まれ、前記第2位置および前記第2スケールが前記第1位置および前記第1スケールとは異なるものとされる、画像化デバイスと、
前記画像化デバイスに動作可能に連結される、データステッチアルゴリズムを実行するプロセッサであって、
前記データステッチアルゴリズムによって、前記機械読み取り可能シンボルの合成モデルが生成され、合成モデル位置における前記後続シンボルデータ領域の前記第2位置および前記第2スケールとの相関関係を実行する、プロセッサと、が設けられ、
前記相関関係に基づいて、前記後続シンボルデータ領域の前記第2位置および前記第2スケールが調節されて、前記第1画像および前記後続画像がデコード用に一緒にステッチされるように修正後続画像が生成される
ことを特徴とするシステム。 - 前記データステッチアルゴリズムによって、前記第1画像からの前記第1シンボルデータ領域が第1バイナリマトリクスに変換され、前記修正後続画像からの前記後続シンボルデータ領域が第2バイナリマトリクスに変換され、前記データステッチアルゴリズムによって、前記第1バイナリマトリクスが前記第2バイナリマトリクスに累積されて、前記シンボルを表わすデコード可能な累積バイナリマトリクスが生成されることを特徴とする請求項8に記載のシステム。
- 前記対応を確立するのに、パラメータ空間における相関関係スコアを最大にすることがさらに含まれていることを特徴とする請求項8に記載のシステム。
- 前記相関関係に画像分析方法が用いられて、前記相関関係によって特徴セットが生成されて前記相関関係スコアが確立されることを特徴とする請求項8に記載のシステム。
- 前記画像化デバイスがハンドヘルド画像化デバイスとされることを特徴とする請求項8に記載のシステム。
- 前記機械読み取り可能シンボルが英数字シンボルとされることを特徴とする請求項8に記載のシステム。
- 前記機械読み取り可能シンボルが2次元マトリクスシンボルとされることを特徴とする請求項8に記載のシステム。
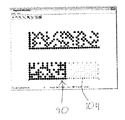
- シンボルの画像を用いて前記シンボルをデコードする方法であって、
第1シンボルデータ領域を含む第1画像、および第2シンボルデータ領域を含む第2画像を、画像化デバイスを用いて取得する取得工程と、
前記第1シンボルデータ領域を第1バイナリマトリクスに、前記第2シンボルデータ領域を第2バイナリマトリクスに変換する変換工程と、
前記第1バイナリシンボルを前記第2バイナリマトリクスに累積する累積工程と、
前記シンボルを表わすデコード可能な累積バイナリマトリクスを生成する生成工程と、
を含んでいることを特徴とする方法。 - 前記画像化デバイスに動作可能に接続されたプロセッサを用いてデータステッチアルゴリズムを実行する工程をさらに含み、
前記データステッチアルゴリズムが前記累積工程および前記生成工程を実行することを特徴とする請求項15に記載の方法。 - 前記累積バイナリマトリクスを、シンボルデコードソフトウェアを用いてデコードする工程をさらに含んでいることを特徴とする請求項15に記載の方法。
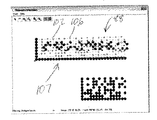
- 前記シンボルの合成モデルを生成する工程と、
前記シンボルの前記合成モデルを前記第1画像および前記第2画像の少なくとも1つと相関させる工程と、
修正画像を生成する工程と、
前記修正画像に基づいて、バイナリマトリクスを含む累積バイナリマトリクスを生成する工程と、
をさらに含んでいることを特徴とする請求項15に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/843,057 US9104932B2 (en) | 2013-03-15 | 2013-03-15 | Systems and methods for pattern stitching and decoding using multiple captured images |
| US13/843057 | 2013-03-15 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016109865A Division JP6457971B2 (ja) | 2013-03-15 | 2016-06-01 | 複数の撮影画像を用いてパターンのステッチおよびデコードするシステムおよび方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014197842A true JP2014197842A (ja) | 2014-10-16 |
Family
ID=50112686
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014048260A Pending JP2014197842A (ja) | 2013-03-15 | 2014-03-12 | 複数の撮影画像を用いてパターンのステッチおよびデコードするシステムおよび方法 |
| JP2016109865A Active JP6457971B2 (ja) | 2013-03-15 | 2016-06-01 | 複数の撮影画像を用いてパターンのステッチおよびデコードするシステムおよび方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016109865A Active JP6457971B2 (ja) | 2013-03-15 | 2016-06-01 | 複数の撮影画像を用いてパターンのステッチおよびデコードするシステムおよび方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9104932B2 (ja) |
| EP (3) | EP3229170A3 (ja) |
| JP (2) | JP2014197842A (ja) |
| HK (1) | HK1202177A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017038368A (ja) * | 2015-08-10 | 2017-02-16 | コグネックス・コーポレイション | 複数の撮影画像を用いてパターンステッチ及びデコードする為に画像取得設定を分類するシステム及び方法 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9684810B2 (en) * | 2013-03-15 | 2017-06-20 | D2L Corporation | System and method for partite optically readable code |
| US10140496B2 (en) * | 2014-12-02 | 2018-11-27 | Symbol Technologies, Llc | System for and method of stitching barcode fragments of a barcode symbol to be read in an imaging-based presentation workstation |
| CN110728161A (zh) * | 2019-09-24 | 2020-01-24 | 天翼电子商务有限公司 | 复杂二维码的识别方法、系统、介质及设备 |
| CN112541369B (zh) * | 2020-12-14 | 2022-08-05 | 合肥高维数据技术有限公司 | 一种信息码识别方法及系统 |
| KR20240035439A (ko) | 2021-06-10 | 2024-03-15 | 코그넥스코오포레이션 | 오브젝트의 다수의 면들의 이미지들을 생성하기 위한 방법들, 시스템들 및 매체 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62162181A (ja) * | 1985-08-27 | 1987-07-18 | Sumitomo Electric Ind Ltd | 光学読取装置 |
| JP2005012619A (ja) * | 2003-06-20 | 2005-01-13 | Mitsubishi Electric Corp | パノラマ画像生成装置 |
| JP2005276119A (ja) * | 2004-03-26 | 2005-10-06 | Casio Comput Co Ltd | コードシンボル読取装置、および、プログラム |
| JP2006195912A (ja) * | 2005-01-17 | 2006-07-27 | Denso Wave Inc | 認証システム |
| JP2010066822A (ja) * | 2008-09-08 | 2010-03-25 | Dainippon Screen Mfg Co Ltd | 検査装置 |
| JP2011503748A (ja) * | 2007-11-13 | 2011-01-27 | コグネックス・コーポレイション | 複数の画像フレームを使用してパターンを読取るシステム、及び方法 |
| JP2011233099A (ja) * | 2010-04-30 | 2011-11-17 | Optoelectronics Co Ltd | 光学的情報読取装置及び光学的情報読取方法 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5262626A (en) | 1989-12-06 | 1993-11-16 | Symbol Technologies, Inc. | Decoding bar codes from multiple scans using element replacement |
| DE19734031A1 (de) | 1997-08-06 | 1999-02-11 | Sick Ag | Verfahren und Vorrichtung zum Lesen eines aus einer vorgegebenen Anzahl von Codeelementen bestehenden Strichcodes |
| US7016539B1 (en) | 1998-07-13 | 2006-03-21 | Cognex Corporation | Method for fast, robust, multi-dimensional pattern recognition |
| US6446868B1 (en) | 1998-11-23 | 2002-09-10 | Informatics, Inc. | Scanning system for decoding two-dimensional barcode symbologies with a one-dimensional general purpose scanner |
| US6899272B2 (en) | 2000-05-17 | 2005-05-31 | Symbol Technologies, Inc | Bioptics bar code reader |
| US6637658B2 (en) | 2001-01-22 | 2003-10-28 | Welch Allyn, Inc. | Optical reader having partial frame operating mode |
| US9092841B2 (en) | 2004-06-09 | 2015-07-28 | Cognex Technology And Investment Llc | Method and apparatus for visual detection and inspection of objects |
| US6824059B2 (en) | 2002-04-30 | 2004-11-30 | Hewlett-Packard Development Company, L.P. | Apparatus for capturing images and barcodes |
| US7219843B2 (en) | 2002-06-04 | 2007-05-22 | Hand Held Products, Inc. | Optical reader having a plurality of imaging modules |
| SE0301143D0 (sv) | 2003-04-17 | 2003-04-17 | C Technologies Ab | Sätt och anordning för inläsning av data |
| US7823789B2 (en) | 2004-12-21 | 2010-11-02 | Cognex Technology And Investment Corporation | Low profile illumination for direct part mark readers |
| US7097102B2 (en) | 2004-07-29 | 2006-08-29 | Symbol Technologies, Inc. | System and method for decoding optical codes read by an imager-based optical code reader |
| US7204420B2 (en) | 2004-08-31 | 2007-04-17 | Symbol Technologies, Inc. | Scanner and method for eliminating specular reflection |
| US7617984B2 (en) | 2004-12-16 | 2009-11-17 | Cognex Technology And Investment Corporation | Hand held symbology reader illumination diffuser |
| US7383994B2 (en) | 2005-05-03 | 2008-06-10 | Datalogic Scanning, Inc. | Methods and systems for forming images of moving optical codes |
| US7770799B2 (en) | 2005-06-03 | 2010-08-10 | Hand Held Products, Inc. | Optical reader having reduced specular reflection read failures |
| JP5017988B2 (ja) * | 2006-09-26 | 2012-09-05 | カシオ計算機株式会社 | コード読取装置及びプログラム |
| WO2008118425A1 (en) | 2007-03-23 | 2008-10-02 | Ltt, Ltd | Method and apparatus for using a limited capacity portable data carrier |
| US20080245869A1 (en) | 2007-03-23 | 2008-10-09 | Ltt, Ltd | Method and apparatus for reading a printed indicia with a limited field of view sensor |
| EP2101281B1 (en) | 2007-03-27 | 2014-02-26 | Casio Computer Co., Ltd. | Bar-code reading apparatus and computer-readable medium |
| US8226010B2 (en) * | 2009-09-25 | 2012-07-24 | Hewlett-Packard Development Company, L.P. | Blur resistant barcode |
| DE102010014937B4 (de) | 2010-04-14 | 2013-10-17 | Ioss Intelligente Optische Sensoren & Systeme Gmbh | Verfahren zum Lesen eines Codes auf einem Substrat durch Zusammensetzen von Code-Fragmenten unter Verwendung eines bildgebenden Codelesers |
| JP5737387B2 (ja) * | 2011-03-22 | 2015-06-17 | 富士通株式会社 | 画像処理装置 |
| DE202012102113U1 (de) | 2012-06-11 | 2012-07-03 | Sick Ag | Optoelektronischer Codeleser |
| DE202012102114U1 (de) | 2012-06-11 | 2012-07-25 | Thomas Neubrand | Vorrichtung zum Auftragen vorportionierter Butter |
-
2013
- 2013-03-15 US US13/843,057 patent/US9104932B2/en active Active
-
2014
- 2014-01-28 EP EP17168516.7A patent/EP3229170A3/en not_active Withdrawn
- 2014-01-28 EP EP19218653.4A patent/EP3654231B1/en active Active
- 2014-01-28 EP EP14152881.0A patent/EP2779023B1/en active Active
- 2014-03-12 JP JP2014048260A patent/JP2014197842A/ja active Pending
-
2015
- 2015-03-17 HK HK15102700.0A patent/HK1202177A1/xx unknown
-
2016
- 2016-06-01 JP JP2016109865A patent/JP6457971B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62162181A (ja) * | 1985-08-27 | 1987-07-18 | Sumitomo Electric Ind Ltd | 光学読取装置 |
| JP2005012619A (ja) * | 2003-06-20 | 2005-01-13 | Mitsubishi Electric Corp | パノラマ画像生成装置 |
| JP2005276119A (ja) * | 2004-03-26 | 2005-10-06 | Casio Comput Co Ltd | コードシンボル読取装置、および、プログラム |
| JP2006195912A (ja) * | 2005-01-17 | 2006-07-27 | Denso Wave Inc | 認証システム |
| JP2011503748A (ja) * | 2007-11-13 | 2011-01-27 | コグネックス・コーポレイション | 複数の画像フレームを使用してパターンを読取るシステム、及び方法 |
| JP2010066822A (ja) * | 2008-09-08 | 2010-03-25 | Dainippon Screen Mfg Co Ltd | 検査装置 |
| JP2011233099A (ja) * | 2010-04-30 | 2011-11-17 | Optoelectronics Co Ltd | 光学的情報読取装置及び光学的情報読取方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017038368A (ja) * | 2015-08-10 | 2017-02-16 | コグネックス・コーポレイション | 複数の撮影画像を用いてパターンステッチ及びデコードする為に画像取得設定を分類するシステム及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6457971B2 (ja) | 2019-01-23 |
| EP3229170A3 (en) | 2018-02-28 |
| EP3654231A1 (en) | 2020-05-20 |
| EP3654231B1 (en) | 2021-08-04 |
| EP2779023B1 (en) | 2019-06-19 |
| HK1202177A1 (en) | 2015-09-18 |
| US20140270539A1 (en) | 2014-09-18 |
| EP3229170A2 (en) | 2017-10-11 |
| EP2779023A1 (en) | 2014-09-17 |
| JP2016184422A (ja) | 2016-10-20 |
| US9104932B2 (en) | 2015-08-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6457971B2 (ja) | 複数の撮影画像を用いてパターンのステッチおよびデコードするシステムおよび方法 | |
| US11455482B2 (en) | Systems and methods for decoding two-dimensional matrix symbols with incomplete or absent fixed patterns | |
| US20090057411A1 (en) | Imaging system for reading target with multiple symbols | |
| US20110121077A1 (en) | Increasing imaging quality of a bar code reader | |
| JP6344389B2 (ja) | 光学文字認識装置 | |
| WO2006078359A1 (en) | Bar code scanner decoding | |
| AU2018334449B2 (en) | Methods and system for reading barcodes captured on multiple images | |
| US7857219B2 (en) | Imaging reader target object finder system | |
| US11030431B2 (en) | Efficiency when reading multiple barcodes on objects | |
| KR101259004B1 (ko) | 카메라를 활용한 큐알코드 변형 보정장치 및 보정 방법 | |
| US20130094695A1 (en) | Method and apparatus for auto-detecting orientation of free-form document using barcode | |
| US9213875B1 (en) | System and method for automatically modeling symbology data in a symbology reader | |
| CN107609448B (zh) | 条码解码方法以及条码解码装置 | |
| JP6457983B2 (ja) | 複数の撮影画像を用いてパターンステッチ及びデコードする為に画像取得設定を分類するシステム及び方法 | |
| CN103189878A (zh) | 用成像扫描仪捕捉表单文档的方法和装置 | |
| US20130027573A1 (en) | Method and apparatus for auto-detecting orientation of free-form document using ocr |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20141024 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150303 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150602 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150702 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150731 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150828 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160202 |