JP2014119798A - Apparatus, program and method for estimating mobile target boarded by user carrying portable terminal - Google Patents
Apparatus, program and method for estimating mobile target boarded by user carrying portable terminal Download PDFInfo
- Publication number
- JP2014119798A JP2014119798A JP2012272316A JP2012272316A JP2014119798A JP 2014119798 A JP2014119798 A JP 2014119798A JP 2012272316 A JP2012272316 A JP 2012272316A JP 2012272316 A JP2012272316 A JP 2012272316A JP 2014119798 A JP2014119798 A JP 2014119798A
- Authority
- JP
- Japan
- Prior art keywords
- base station
- probability
- time
- movement
- moving object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Abstract
Description
本発明は、携帯端末を所持したユーザの移動を推定する技術に関する。 The present invention relates to a technique for estimating the movement of a user who has a mobile terminal.
近年、携帯電話機やスマートフォンに代表される携帯端末には、GPS(Global Positioning System)のような測位機能が、一般的に搭載されてきている。そのため、ユーザは、携帯端末を用いて現在位置を測位できると共に、その位置をネットワークを介してサーバへ送信することによって、様々なサービスの提供を受けることができる。 In recent years, a mobile terminal represented by a mobile phone or a smartphone has generally been equipped with a positioning function such as GPS (Global Positioning System). Therefore, the user can measure the current position using the mobile terminal, and can receive various services by transmitting the position to the server via the network.
従来、サーバが、携帯端末から位置情報を収集することによって、そのユーザが搭乗する移動対象物を推定する技術がある(例えば非特許文献1参照)。この技術によれば、移動対象物として「車」「電車」「飛行機」「自転車」のように識別することができる。しかし、携帯端末について、GPS機能及びそのアプリケーションを常時起動させておく必要があると共に、その位置情報におけるパケットの送出量も増加させてしまう。結果的に、携帯端末の消費電力が高くなり、携帯端末の電池の消耗を早めることとなる。 Conventionally, there is a technique in which a server estimates a moving object on which a user is boarded by collecting position information from a mobile terminal (see, for example, Non-Patent Document 1). According to this technique, it is possible to identify a moving object such as “car”, “train”, “airplane”, and “bicycle”. However, for the mobile terminal, it is necessary to always activate the GPS function and its application, and the amount of packets transmitted in the position information is also increased. As a result, the power consumption of the mobile terminal is increased, and the battery of the mobile terminal is consumed quickly.
これに対し、携帯端末の消費電力を低く抑えるべく、当該携帯端末に内蔵された加速度センサを用いて、移動対象物を推定する技術もある(例えば非特許文献2及び3参照)。特に非特許文献2の技術によれば、加速度の振動パターンが移動対象物毎に異なることを利用して、加速度のピーク周波数等を特徴量として、移動対象物を推定することができる。しかし、携帯端末は、計測した加速度データをサーバへ送信する必要がある。リアルタイムに、ユーザが搭乗する移動対象物を推定することとなれば、結果的に、送信すべき加速度データのパケットの送出量は増加することとなる。
On the other hand, there is also a technique for estimating a moving object using an acceleration sensor built in the portable terminal in order to keep the power consumption of the portable terminal low (for example, see Non-Patent
通常、通信事業者設備としては、その携帯端末が配下となる基地局の位置情報の履歴を収集することができる。そこで、本願の発明者らは、基地局位置情報のみから、ユーザが搭乗する移動対象物を推定することが好ましい、と考えた。この場合、携帯端末は、GPS機能を起動させる必要もないし、測位情報や加速度データをサーバへ送信する必要もない。しかしながら、このような基地局位置情報は、空間的粒度が粗くかつ時間間隔が一定でないという問題がある。 Usually, as a communication carrier equipment, it is possible to collect a history of position information of a base station under the control of the mobile terminal. Therefore, the inventors of the present application considered that it is preferable to estimate the moving object on which the user is boarded from only the base station position information. In this case, the mobile terminal does not need to activate the GPS function and does not need to transmit positioning information or acceleration data to the server. However, such base station position information has a problem that the spatial granularity is coarse and the time interval is not constant.
そこで、本発明では、携帯端末の測位機能を起動させることなく、通信事業者設備によって取得可能な、空間的粒度が粗く且つ時間間隔が一定でない基地局位置情報を用いて、ユーザが搭乗する移動対象物を推定することができる通信設備装置、プログラム及び方法を提供することを目的とする。 Therefore, in the present invention, the movement on which the user is boarded using the base station position information with a coarse spatial granularity and a non-constant time interval that can be acquired by the telecommunications carrier equipment without activating the positioning function of the mobile terminal. It is an object of the present invention to provide a communication equipment device, a program, and a method capable of estimating an object.
本発明によれば、広域無線通信網に接続されており、携帯端末を所持したユーザが搭乗する移動対象物を推定する装置であって、
携帯端末毎に、通信された日時刻及びその基地局位置情報を対応付けた複数の通信履歴を蓄積した通信履歴蓄積手段と、
移動対象物毎に、距離lの移動に要する時間tの確率分布を蓄積した確率分布蓄積手段と、
基地局毎に又は全ての基地局について、当該基地局を中心とした所定半径距離に基づく領域をk(k>2)等分に予め分割して設定する領域分割手段と、
移動対象物毎に、確率分布蓄積手段の確率分布を用いて、先の基地局の各分割領域から後の基地局の各分割領域に対する全ての組み合わせについて移動確率を算出する移動確率算出手段と、
時間経過に応じた携帯端末と接続する基地局の変化に基づいて移動確率算出手段を繰り返すように制御し、移動対象物毎に、時間経過に応じた各基地局の各分割領域の移動確率をノードとする存在確率の木構造を生成する存在確率算出手段と、
存在確率算出手段の木構造について、存在確率が最も高いリーフにおける移動対象物を、当該携帯端末を所持したユーザが利用していると推定する移動対象物推定手段と
を有することを特徴とする。
According to the present invention, it is an apparatus for estimating a moving object that is connected to a wide area wireless communication network and is carried by a user who has a mobile terminal,
For each portable terminal, communication history storage means for storing a plurality of communication histories in association with the date and time of communication and the base station position information;
Probability distribution accumulating means for accumulating the probability distribution of time t required for movement of distance l for each moving object;
An area dividing means for dividing and setting an area based on a predetermined radial distance centered on the base station in advance for each base station or for all base stations into k (k> 2) equal parts;
For each moving object, using the probability distribution of the probability distribution accumulating means, the movement probability calculating means for calculating the movement probability for all combinations from each divided area of the previous base station to each divided area of the subsequent base station;
Based on the change of the base station connected to the mobile terminal according to the passage of time, it is controlled to repeat the movement probability calculation means, and the movement probability of each divided region of each base station according to the passage of time is determined for each moving object. Existence probability calculating means for generating a tree structure of existence probability as a node;
The tree structure of the existence probability calculation means includes a movement object estimation means for estimating that the movement object in the leaf having the highest existence probability is being used by the user who possesses the portable terminal.
本発明の装置における他の実施形態によれば、
移動確率算出手段は、
先の分割領域及び後の分割領域に複数の任意の点を散布し、先の任意の点から後の任意の点へ間の距離lについて、先の基地局に接続した時刻と後の基地局に接続した時刻との間の時間tを要する移動確率を、移動対象物毎に、確率分布を用いて算出し、
移動対象物毎に、複数の任意の点の間の移動確率の平均値を、先の分割領域から後の分割領域へ当該移動対象物が利用されたであろう移動確率とすることも好ましい。
According to another embodiment of the device of the invention,
The movement probability calculation means
A plurality of arbitrary points are scattered in the previous divided area and the subsequent divided area, and the distance from the previous arbitrary point to the subsequent arbitrary point is connected to the previous base station and the subsequent base station. For each moving object, a movement probability that requires time t between the time of connection and the time of connection is calculated using a probability distribution,
It is also preferable to set the average value of the movement probabilities between a plurality of arbitrary points for each movement object as the movement probability that the movement object will be used from the previous divided area to the subsequent divided area.
本発明の装置における他の実施形態によれば、確率分布蓄積手段の確率分布は、移動対象物毎に、移動速度の平均値ν及び標準偏差σによって予め規定された確率分布であることも好ましい。 According to another embodiment of the apparatus of the present invention, it is also preferable that the probability distribution of the probability distribution accumulating means is a probability distribution defined in advance by the average value ν of the moving speed and the standard deviation σ for each moving object. .
本発明の装置における他の実施形態によれば、確率分布は、以下の式によって算出されることも好ましい。

tn+1:後の時刻
Ptn:先の時刻tnにおける任意の第1の点
Ptn+1:後の時刻tn+1における任意の第2の点
lPtn,Ptn+1:第1の点Ptnと第2の点Ptn+1との間の距離
g:第1の点Ptnから第2の点Ptn+1への時間tn+1−tnで移動できる確率
According to another embodiment of the apparatus of the present invention, the probability distribution is also preferably calculated by the following formula:
tn + 1: Later time
Ptn: Arbitrary first point at the previous time tn
Ptn + 1: Arbitrary second point at a later time tn + 1 l Ptn, Ptn + 1 : Distance between the first point Ptn and the second point Ptn + 1 g: From the first point Ptn Probability of moving to the second point Ptn + 1 at time tn + 1−tn
本発明の装置における他の実施形態によれば、
位置情報履歴生成手段によって生成された位置情報履歴を、所定時間の時間窓(時間区間)に分割する時間窓分割手段と、
時間窓毎に、複数の基地局位置情報に基づく位置の確率分布が、多峰性である場合には「移動」と判定する移動判定手段と
を更に有し、
移動確率算出手段は、移動と判定された所定数以上連続する時間窓について、移動確率を算出することも好ましい。
According to another embodiment of the device of the invention,
Time window dividing means for dividing the position information history generated by the position information history generating means into time windows (time intervals) of a predetermined time;
For each time window, when the probability distribution of the position based on the plurality of base station position information is multimodal, it further includes movement determination means for determining “movement”,
It is also preferable that the movement probability calculation means calculates the movement probability for a time window that is continuous for a predetermined number or more determined to be movement.
本発明の装置における他の実施形態によれば、
移動判定手段は、時間窓毎に、
(S1)任意の点(位置情報)を、最初の中心点とし、
(S2)中心点から、第1の閾値の半径の円に含まれる点を用いて、重心を算出し、
(S3)重心と現在の中心点との差が、第2の閾値以下であるか否かを判定し、
(S4)S3によって偽と判定された場合、その重心を次の中心点として、再びS2へ戻って、変化量が第2の閾値以下に収まるまで繰り返し、
(S5)S3によって真と判定された場合、その重心を代表点位置情報とし、
最後に、当該時間窓について、代表点位置情報の種類数が、複数個の場合には「移動」と判定することも好ましい。
According to another embodiment of the device of the invention,
The movement determination means is for each time window.
(S1) An arbitrary point (position information) is set as the first center point,
(S2) Calculate the center of gravity from the center point using the points included in the circle with the first threshold radius,
(S3) Determine whether the difference between the center of gravity and the current center point is less than or equal to the second threshold,
(S4) If it is determined to be false by S3, the center of gravity is set as the next center point, the process returns to S2 again, and the process is repeated until the amount of change falls below the second threshold.
(S5) When determined to be true by S3, the center of gravity is used as representative point position information,
Finally, it is also preferable to determine “move” when there are a plurality of types of representative point position information for the time window.
本発明の装置における他の実施形態によれば、
滞在移動判定手段は、最後に、当該時間窓について、全ての代表点が第1の閾値又は第2の閾値の半径の円周領域内に収まる場合、収束した代表点の種類数が1個であるとみなすことも好ましい。
According to another embodiment of the device of the invention,
Lastly, the stay movement determination means, when all the representative points are within the circumferential area of the radius of the first threshold value or the second threshold value for the time window, the number of types of converged representative points is one. It is also preferable to consider it to be.
本発明によれば、前述した装置を、広域無線通信網に接続した通信設備装置であって、通信履歴蓄積手段に通信履歴を蓄積するために、
基地局識別子及び基地局位置情報を対応付けて記憶する基地局位置情報管理手段と、
携帯端末を配下に接続させる基地局から、携帯端末毎における通信された日時刻及びその基地局識別子の通信履歴を収集する通信履歴収集手段と、
基地局位置情報管理手段を用いて、通信履歴毎に、基地局識別子に対応する基地局位置情報を更に対応付ける位置情報履歴生成手段と
を更に有することを特徴とする。
According to the present invention, the above-described device is a communication equipment device connected to a wide area wireless communication network, and in order to store a communication history in a communication history storage means,
Base station location information management means for storing a base station identifier and base station location information in association with each other;
From a base station to which the mobile terminal is connected, a communication history collecting means for collecting a communication history of the date and time of communication for each mobile terminal and its base station identifier,
The apparatus further comprises position information history generation means for further associating the base station position information corresponding to the base station identifier for each communication history using the base station position information management means.
本発明によれば、広域無線通信網に接続されており、携帯端末を所持したユーザが搭乗する移動対象物を推定する装置に搭載されたコンピュータを機能させるプログラムであって、
携帯端末毎に、通信された日時刻及びその基地局位置情報を対応付けた複数の通信履歴を蓄積した通信履歴蓄積手段と、
移動対象物毎に、距離lの移動に要する時間tの確率分布を蓄積した確率分布蓄積手段と、
基地局毎に又は全ての基地局について、当該基地局を中心とした所定半径距離に基づく領域をk(k>2)等分に予め分割して設定する領域分割手段と、
移動対象物毎に、確率分布蓄積手段の確率分布を用いて、先の基地局の各分割領域から後の基地局の各分割領域に対する全ての組み合わせについて移動確率を算出する移動確率算出手段と、
時間経過に応じた携帯端末と接続する基地局の変化に基づいて移動確率算出手段を繰り返すように制御し、移動対象物毎に、時間経過に応じた各基地局の各分割領域の移動確率をノードとする存在確率の木構造を生成する存在確率算出手段と、
存在確率算出手段の木構造について、存在確率が最も高いリーフにおける移動対象物を、当該携帯端末を所持したユーザが利用していると推定する移動対象物推定手段と
してコンピュータを機能させることを特徴とする。
According to the present invention, there is provided a program for causing a computer mounted on an apparatus for estimating a moving object on which a user carrying a mobile terminal is connected to a wide area wireless communication network to function.
For each portable terminal, communication history storage means for storing a plurality of communication histories in association with the date and time of communication and the base station position information;
Probability distribution accumulating means for accumulating the probability distribution of time t required for movement of distance l for each moving object;
An area dividing means for dividing and setting an area based on a predetermined radial distance centered on the base station in advance for each base station or for all base stations into k (k> 2) equal parts;
For each moving object, using the probability distribution of the probability distribution accumulating means, the movement probability calculating means for calculating the movement probability for all combinations from each divided area of the previous base station to each divided area of the subsequent base station;
Based on the change of the base station connected to the mobile terminal according to the passage of time, it is controlled to repeat the movement probability calculation means, and the movement probability of each divided region of each base station according to the passage of time is determined for each moving object. Existence probability calculating means for generating a tree structure of existence probability as a node;
With respect to the tree structure of the existence probability calculating means, the computer is caused to function as a moving object estimation means for estimating that the user having the mobile terminal is using the moving object in the leaf having the highest existence probability. To do.
本発明によれば、広域無線通信網に接続された通信設備装置について、携帯端末を所持したユーザが搭乗する移動対象物を推定する方法であって、
携帯端末毎に、通信された日時刻及びその基地局位置情報を対応付けた複数の通信履歴を蓄積した通信履歴蓄積部と、
移動対象物毎に、距離lの移動に要する時間tの確率分布を蓄積した確率分布蓄積部と、
基地局毎に又は全ての基地局について、当該基地局を中心とした所定半径距離に基づく領域をk(k>2)等分に予め分割して設定する領域分割部と
を有し、
通信履歴蓄積部に蓄積された通信履歴について、移動対象物毎に、確率分布蓄積手段の確率分布を用いて、先の基地局の各分割領域から後の基地局の各分割領域に対する全ての組み合わせについて移動確率を算出する第1のステップと、
時間経過に応じた携帯端末と接続する基地局の変化に基づいて移動確率算出手段を繰り返すように制御し、移動対象物毎に、時間経過に応じた各基地局の各分割領域の移動確率をノードとする存在確率の木構造を生成する第2のステップと、
第2のステップの木構造について、存在確率が最も高いリーフにおける移動対象物を、当該携帯端末を所持したユーザが利用していると推定する第3のステップと
を有することを特徴とする。
According to the present invention, a communication equipment connected to a wide area wireless communication network is a method for estimating a moving object on which a user carrying a mobile terminal is boarded,
For each portable terminal, a communication history storage unit that stores a plurality of communication histories in association with the date and time of communication and the base station position information,
For each moving object, a probability distribution accumulating unit that accumulates a probability distribution of time t required for movement of distance l,
For each base station or for all base stations, an area dividing unit that preliminarily divides and sets an area based on a predetermined radial distance centered on the base station into k (k> 2) equal parts,
For the communication history stored in the communication history storage unit, for each moving object, using the probability distribution of the probability distribution storage means, all combinations from each divided region of the previous base station to each divided region of the subsequent base station A first step of calculating a movement probability for
Based on the change of the base station connected to the mobile terminal according to the passage of time, it is controlled to repeat the movement probability calculation means, and the movement probability of each divided region of each base station according to the passage of time is determined for each moving object. A second step of generating a tree structure of existence probabilities as nodes;
The tree structure of the second step includes a third step of estimating that the moving object in the leaf having the highest existence probability is being used by the user who possesses the mobile terminal.
本発明の通信設備装置、プログラム及び方法によれば、携帯端末の測位機能を起動させることなく、通信事業者設備によって取得可能な、空間的粒度が粗く且つ時間間隔が一定でない基地局位置情報を用いて、ユーザが搭乗する移動対象物を推定することができる。 According to the communication equipment apparatus, program, and method of the present invention, the base station location information with a coarse spatial granularity and a non-constant time interval that can be acquired by the communication carrier equipment without activating the positioning function of the mobile terminal. It is possible to estimate the moving object on which the user is boarded.
以下、本発明の実施の形態について、図面を用いて詳細に説明する。 Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings.
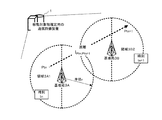
図1は、移動対象物の移動を表す空間的な外観図である。 FIG. 1 is a spatial external view showing movement of a moving object.
ユーザに所持された携帯端末(例えば携帯電話機やスマートフォン)は、いずれの位置にあっても、常に、基地局の配下にあってその基地局と通信し続けている。図1によれば、ユーザは、移動対象物に搭乗しており、携帯端末の移動は、その移動対象物の移動と同じものとなる。 A mobile terminal (for example, a mobile phone or a smartphone) possessed by a user is always under the control of a base station and continues to communicate with the base station regardless of the position. According to FIG. 1, the user is on the moving object, and the movement of the mobile terminal is the same as the movement of the moving object.
多数の基地局を統合する通信事業者設備では、携帯端末毎に、空間的粒度が粗く、且つ、時間間隔が一定でない基地局位置情報を常に収集することができる。「空間的粒度が粗く」とは、位置情報同士の地理的な距離が比較的長いことを意味する。また、「時間間隔が一定でない」とは、位置情報の取得時間間隔が比較的ばらついていることを意味する。 In a carrier equipment that integrates a large number of base stations, base station position information with a coarse spatial granularity and a constant time interval can always be collected for each mobile terminal. “Coarse spatial granularity” means that the geographical distance between location information is relatively long. Further, “the time interval is not constant” means that the acquisition time intervals of the position information are relatively varied.
広域無線通信網(携帯電話網)に接続された基地局3は、その配下に位置する携帯端末2と通信することによって、その日時刻を通信履歴として取得する。通信履歴は、携帯端末に対するユーザ操作を要するメールの送受信やWebページの閲覧の時に限られない。携帯端末にインストールされたアプリケーションが自動的に実行するデータの送受信の時にも、基地局3によって携帯端末2からの通信履歴として取得される。
The
図1によれば、移動対象物として、「電車」「自転車」「自動車」が表されている。移動対象物毎に、基地局の通信履歴が、時間経過に応じて以下のように推移している。
「電車」 :基地局3A->基地局3B->基地局3C
「自転車」 :基地局3B->基地局3E
「自動車」:基地局3A->基地局3B->基地局3D
According to FIG. 1, “train”, “bicycle”, and “automobile” are represented as moving objects. For each moving object, the communication history of the base station changes as follows with the passage of time.
"Train":
“Bicycle”:
"Automobile":
図2は、本発明における移動対象物を推定する装置の機能構成図である。 FIG. 2 is a functional configuration diagram of an apparatus for estimating a moving object in the present invention.
本発明における装置1は、携帯端末を所持したユーザが搭乗する移動対象物を推定するものであって、通信履歴を予め蓄積したものである。また、装置1は、通信履歴を予め蓄積することなく、広域無線通信網(携帯電話網)に設置することによって基地局3から通信履歴を収集する通信設備装置であってもよい。
The
図2によれば、移動対象物推定用の装置1は、本発明の特徴機能として、通信履歴蓄積部120と、確率分布蓄積部121と、領域分割部122と、移動確率算出部123と、存在確率算出部124と、移動対象物推定部125と、アプリケーション処理部13とを有する。アプリケーション処理部13は、本発明によって推定された各ユーザが搭乗する移動対象物に基づいて、様々なサービスを実行する。通信インタフェース部を除くこれら機能構成部は、装置に搭載されたコンピュータを機能させるプログラムを実行することによって実現される。また、図2によれは、各機能構成部を用いた処理の流れは、移動対象物を推定する方法としても理解できる。
According to FIG. 2, the
また、装置1は、広域無線通信網(携帯電話網)に設置された通信設備装置である場合、通信履歴蓄積部121へ通信履歴を蓄積するために、オプション機能として、広域通信網に接続する通信インタフェース部10と、基地局位置情報管理部111と、通信履歴収集部112と、位置情報履歴生成部113とを更に有する。また、通信履歴蓄積部120から出力された通信履歴に対して、時間窓分割部114と、移動判定部115とを更に有することも好ましい。以下では、装置1は、通信設備装置であるものとして説明する。
In addition, when the
[基地局位置情報管理部111]
基地局位置情報管理部111は、基地局識別子と基地局位置情報とを対応付けて記憶する。
[Base station location information management unit 111]
Base station location
図3は、基地局位置情報の表である。基地局識別子毎に、緯度・経度の基地局位置情報が対応付けられている。図3によれば、基地局1は、緯度35.825及び経度139.510の位置に設置されていることが理解できる。また、基地局3は、緯度35.825及び経度139.520の位置に設置されていることが理解できる。尚、このような基地局位置情報は、基地局位置情報管理部111内に予め蓄積したものであってもよいし、通信インタフェース部10を介して各基地局3から取得するものであってもよい。
FIG. 3 is a table of base station position information. For each base station identifier, latitude / longitude base station position information is associated. According to FIG. 3, it can be understood that the
[通信履歴収集部112]
通信履歴収集部112は、携帯端末2を配下に接続させる基地局3から、携帯端末2毎における日時刻及び基地局識別子の通信履歴を収集する。
[Communication history collection unit 112]
The communication
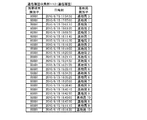
図4は、通信履歴の表である。通信履歴は、基地局3が携帯端末2からの通信を受け付けた記録である。通信履歴は、以下のように、携帯端末2の「端末識別子」(アドレス、電話番号、識別番号等)毎に、「日時刻」及び「基地局識別子」が対応付けられている。
通信履歴(端末識別子、日時刻、基地局識別子)
図4における最初のログによれば、携帯端末0001は、2010年6月15日17:54:50に、基地局3と通信したことが記録されている。また、携帯端末0001は、2010年6月15日17:57:00には、基地局1と通信したことが記録されている。
FIG. 4 is a communication history table. The communication history is a record in which the
Communication history (terminal identifier, date / time, base station identifier)
According to the first log in FIG. 4, it is recorded that the mobile terminal 0001 communicated with the
[位置情報履歴生成部113]
位置情報履歴生成部113は、基地局位置情報管理部111を用いて、通信履歴毎に、基地局識別子に対応する基地局位置情報を更に対応付ける。その通信履歴は、通信履歴蓄積部120へ出力される。
[Position information history generation unit 113]
The location information
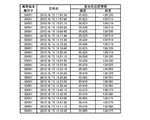
図5は、通信履歴に基地局位置情報を対応付けた表である。図5の表は、図4の表の基地局識別子の部分に、図3の基地局の緯度・経度が対応付けられたものである。図5における最初のログによれば、携帯端末0001は、2010年6月15日17:54:50に、緯度35.825及び経度139.520の基地局と通信したことが理解できる。また、携帯端末0001は、2010年6月15日17:57:00に、緯度35.825及び経度139.510の基地局と通信したことが理解できる。 FIG. 5 is a table in which the base station position information is associated with the communication history. In the table of FIG. 5, the latitude and longitude of the base station of FIG. 3 are associated with the base station identifier portion of the table of FIG. 4. According to the first log in FIG. 5, it can be understood that the mobile terminal 0001 communicated with the base station at latitude 35.825 and longitude 139.520 on June 15, 2010, 17:54:50. Further, it can be understood that the portable terminal 0001 communicated with the base station at latitude 35.825 and longitude 139.510 at 17:57:00 on June 15, 2010.
[通信履歴蓄積部120]
通信履歴蓄積部120は、位置情報履歴生成部113から出力された通信履歴を蓄積する。
[Communication history storage unit 120]
The communication
[時間窓分割部114]
時間窓分割部114は、通信履歴蓄積部120から出力された複数の通信履歴を、所定の時間窓(時間区間)に分割する。時間窓は、時間幅T及びシフト幅Sによって決定される。シフト幅Sとは、開始時刻をSだけ遅らせたものである。即ち、T>Sの場合、時間窓は、T−Sだけ重畳することとなる。
[Time window dividing unit 114]
The time
時間幅Tは、「どの時間幅で移動と判定するか」を決めるパラメータである。時間窓内に所定数以上の位置情報がない場合には滞在/移動の判定が難しい。そのために、時間幅Tは、全体の通信履歴数から判断して、時間窓内にできる限り所定数以上の位置情報が入るように決める必要がある。 The time width T is a parameter that determines “with which time width it is determined to move”. When there is no predetermined number or more of position information within the time window, it is difficult to determine stay / movement. For this purpose, the time width T needs to be determined based on the total number of communication histories so that as much position information as possible falls within the time window as much as possible.
また、シフト幅Sは、その幅を短くすると、滞在時間区間の時間解像度が増す。一方で、その幅を長くすると、時間窓の数が多くなるため、計算量が増大する。従って、シフト幅Sは、アプリケーションが求める時間解像度及び処理時間に応じて決める必要がある。 Further, when the shift width S is shortened, the time resolution of the stay time section is increased. On the other hand, if the width is increased, the number of time windows increases, and the amount of calculation increases. Therefore, the shift width S needs to be determined according to the time resolution and processing time required by the application.
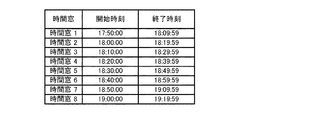
図6は、各時間窓の表である。図6によれば、T=20分及びS=10分とした場合における、各時間窓の開始時刻及び終了時刻を表す。図6によれば、時間窓1は、17:50:00〜18:09:59であり、T=00:20:00となっている。また、時間窓2は、18:00:00〜18:19:59であり、時間窓1に対してS=00:10:00となっている。
FIG. 6 is a table for each time window. FIG. 6 shows the start time and end time of each time window when T = 20 minutes and S = 10 minutes. According to FIG. 6, the
図7は、図5の表を、図6の時間窓で分割した表である。図7によれば、時間窓1には、5個の通信履歴が記録されており、時間窓3には、8個の通信履歴が記録されている。
FIG. 7 is a table obtained by dividing the table of FIG. 5 by the time window of FIG. According to FIG. 7, five communication histories are recorded in the
[移動判定部115]
移動判定部115は、時間窓毎に、複数の基地局位置情報に基づく位置の確率分布が、多峰性である場合には「移動」と判定し、そうでない場合には「滞在」と判定する。「多峰性」とは、位置の確率分布が複数の山の形状をしていることを意味する。即ち、1つの時間窓(例えば20分)について、多峰性であるということは、その位置について「移動」と判定することができる。逆に、位置の確率分布が1つの山の形状をしている場合、単峰性を意味する。1つの時間窓について、単峰性であるということは、その位置について「滞在」中と判定することができる。
[Movement determination unit 115]
For each time window, the
尚、移動判定部115は、後述する時間クラスタリング部128のために、所定数以上の通信履歴が記録されていない時間窓については、「未判定」とすることも好ましい。例えば所定数2個以上の通信履歴が記録されていない時間窓については、「未判定」とする。
Note that the
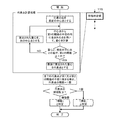
図8は、多峰性か否かを判定するためのフローチャートである。 FIG. 8 is a flowchart for determining whether or not there is multimodality.
図8によれば、移動判定部115は、位置情報の確率分布が多峰性か否かを判定するため、代表点計算処理を実行する。その結果、代表点の種類数が複数個であれば多峰性であって「移動」中と判定され、代表点の種類数が1個であれば単峰性であって「滞在」中と判定される。
According to FIG. 8, the
代表点計算処理は、各時間窓に含まれる複数の位置情報について、以下のステップによって実行される。
(S1)任意の点(位置情報)を、最初の中心点とする。
(S2)中心点から、第1の閾値(例えば2km)の半径の円に含まれる点(位置情報)を用いて、重心を算出する。
(S3)次に、重心と現在の中心点との差(変化量)が、第2の閾値(例えば100m)以下であるか否かを判定する。
(S4)S3によって偽と判定された場合、その重心を次の中心点とする。そして、再びS2へ戻り、変化量が第2の閾値以下に収まるまで繰り返す。
(S5)S3によって真と判定された場合、その重心(収束した点)を代表点とする。
そして、最後に、各時間窓について、収束した代表点の種類数が、1個の場合には「滞在」と判定し、複数個の場合には「移動」と判定する。尚、収束した代表点が全て、第2の閾値の半径の円周領域内に収まる場合、収束した代表点の種類数が1個であるとみなしてもよい。尚、ここで、当該時間窓について、全ての代表点が第1の閾値又は第2の閾値の半径の円周領域内に収まる場合、収束した代表点の種類数が1個であるとみなすことも好ましい。
The representative point calculation process is executed by the following steps for a plurality of pieces of position information included in each time window.
(S1) An arbitrary point (position information) is set as the first center point.
(S2) The center of gravity is calculated from the center point using a point (position information) included in a circle having a radius of the first threshold (for example, 2 km).
(S3) Next, it is determined whether or not the difference (change amount) between the center of gravity and the current center point is equal to or less than a second threshold value (for example, 100 m).
(S4) If determined to be false by S3, the center of gravity is set as the next center point. And it returns to S2 again and repeats until the variation | change_quantity falls below the 2nd threshold value.
(S5) If determined to be true by S3, the center of gravity (the converged point) is set as the representative point.
Finally, for each time window, if the number of converged representative points is one, it is determined as “stay”, and if there are a plurality of types, it is determined as “moving”. Note that when all the converged representative points are within the circumferential region having the radius of the second threshold, the number of converged representative points may be regarded as one. Here, regarding the time window, when all the representative points fall within the circumferential region having the radius of the first threshold value or the second threshold value, it is considered that the number of types of converged representative points is one. Is also preferable.
以下では、図7の時間窓1及び時間窓3について、具体的に滞在/移動を、代表点抽出処理を用いて判定する。
Hereinafter, the stay / movement is specifically determined for the
(時間窓1における移動判定)
(1)時間窓1の点(35.825、139.52)に関する1回目の重心を計算する。時間窓1の点(35.825、139.52)と時間窓1に含まれるその他の点の距離はすべて2km以内であるので、その他の点すべての平均をとると(35.824、139.514)となる。
(2)時間窓1の点(35.825、139.52)に関する2回目の重心を計算する。2回目の重心計算では、中心点を(35.824、139.514)とする。中心点と時間窓1に含まれるその他の点の距離はすべて2km以内であるので、その他の点すべての平均をとると(35.824、139.514)となる。
(3)1回目と2回目の重心計算の結果は同じであり変化量は100m以下であるので、時間窓1の点(35.825、139.52)の代表点は(35.824、139.514)となる。
(4)時間窓1の点(35.825、139.51)に関する1回目の重心を計算する。時間窓1の点(35.825、139.510)と時間窓1に含まれるその他の点の距離はすべて2km以内であるので、その他の点すべての平均をとると(35.824、139.514)となる。
(5)時間窓1の点(35.825、139.51)に関する2回目の重心を計算する。2回目の重心計算では、中心点を(35.824、139.514)とする。中心点と時間窓1に含まれるその他の点の距離はすべて2km以内であるので、その他の点すべての平均をとると(35.824、139.514)となる。
(6)1回目と2回目の重心計算の結果は同じであり、変化量は100m以下であるので、時間窓1の点(35.825、139.51)の代表点は(35.824、139.514)となる。
(7)時間窓1の点(35.820、139.51)に関する1回目の重心を計算する。時間窓1の点(35.820、139.510)と時間窓1に含まれるその他の点の距離はすべて2km以内であるので、その他の点すべての平均をとると(35.824、139.514)となる。
(8)時間窓1の点(35.820、139.51)に関する2回目の重心を計算する。2回目の重心計算では、中心点を(35.824、139.514)とする。中心点と時間窓1に含まれるその他の点の距離はすべて2km以内であるので、その他の点すべての平均をとると(35.824、139.514)となる。
(9)1回目と2回目の重心計算の結果は同じであり、変化量は100m以下であるので、時間窓1の点(35.820、139.51)の代表点は(35.824、139.514)となる。
以上より、計算された代表点はいずれの点についても(35.824、139.514)であり、代表点の種類数は1であるので、時間窓1は「滞在」と判定される。
(Movement judgment in time window 1)
(1) The first centroid for the point (35.825, 139.52) in
(2) Calculate the second center of gravity for the point (35.825, 139.52) of
(3) Since the results of the first and second centroid calculations are the same and the amount of change is 100 m or less, the representative points of the
(4) Calculate the first center of gravity for the point (35.825, 139.51) of
(5) Calculate the second center of gravity for the point (35.825, 139.51) of
(6) The results of the first and second centroid calculations are the same and the amount of change is 100 m or less, so the representative points of the
(7) Calculate the first centroid for the point (35.820, 139.51) in
(8) Calculate the second center of gravity for the point (35.820, 139.51) of
(9) Since the results of the first and second centroid calculations are the same, and the amount of change is 100 m or less, the representative points of the
From the above, the calculated representative points are (35.824, 139.514) for any point, and the number of types of representative points is 1, so that the
(時間窓3における移動判定)
(1)時間窓3の点(35.825、139.51)に関する1回目の重心を計算する。時間窓3の点(35.825、139.510)と時間窓3に含まれるその他の点の距離を計算すると、(35.825、139.51)、(35.820、139.51)、(35.820、139.51)、(35.825、139.52)、(35.820、139.51)は2km以内であるがそれ以外は2kmを超えるので、上述の点の平均をとると(35.822、139.512)となる。
(2)時間窓3の点(35.825、139.51)に関する2回目の重心を計算する。2回目の重心計算では、中心点を(35.822、139.512)とする。中心点と時間窓3に含まれるその他の点の時間窓3に含まれるその他の点の距離を計算すると、(35.825、139.51)、(35.820、139.51)、(35.820、139.51)、(35.825、139.52)、(35.820、139.51)、は2km以内であるがそれ以外は2kmを超えるので、上述の点の平均をとると(35.822、139.512)となる。
(3)1回目と2回目の重心計算の結果は同じであり、変化量は100m以下であるので、時間窓3の点(35.825、139.51)の代表点は(35.822、139.512)となる。
(4)時間窓3の点(35.850、139.53)に関する1回目の重心を計算する。時間窓3の点(35.850、139.530)と時間窓3に含まれるその他の点の距離を計算すると、(35.850、139.53)、(35.850、139.53)は2km以内であるがそれ以外は2kmを超えるので、上述の点の平均をとると(35.850、139.53)となる。
(5)時間窓3の点(35.850、139.53)に関する2回目の重心を計算する。2回目の重心計算では、中心点を(35.850、139.53)とする。中心点と時間窓3に含まれるその他の点の時間窓3に含まれるその他の点の距離を計算すると、(35.850、139.53)、(35.850、139.53)は2km以内であるがそれ以外は2kmを超えるので、上述の点の平均をとると(35.850、139.53)となる。
(6)1回目と2回目の重心計算の結果は同じであり、変化量は100m以下であるので、時間窓3の点(35.850、139.53)の代表点は(35.850、139.53)となる。
(7)時間窓3のその他の点の代表点の計算は省略する。
以上より、計算された代表点は(35.822、139.512)、(35.850、139.53)(以下省略)と2以上であるため、時間窓3は「移動」と判定される。
(Movement judgment in time window 3)
(1) The first centroid about the point (35.825, 139.51) of the
(2) Calculate the second center of gravity for the point (35.825, 139.51) of
(3) The results of the first and second centroid calculations are the same, and the amount of change is 100 m or less, so the representative points of the
(4) The first centroid about the point (35.850, 139.53) of the
(5) Calculate the second center of gravity for the point (35.850, 139.53) in
(6) The results of the first and second centroid calculations are the same and the amount of change is 100 m or less, so the representative points of the
(7) Calculation of representative points of other points in the
As described above, since the calculated representative points are (35.822, 139.512), (35.850, 139.53) (hereinafter omitted) and two or more, the
尚、移動判定部115は、時間窓毎に、複数の基地局位置情報に対してカーネル密度推定(Kernel density estimation)を用いて単峰性か否かを判定することも好ましい。カーネル密度推定とは、確率変数の確率密度関数を推定するべく、ある母集団の標本のデータを外挿する方法である。この方法によれば、カーネル関数を用いて、峰となるコブを導出することができる。
In addition, it is preferable that the
[確率分布蓄積部121]
確率分布蓄積部121は、移動対象物毎に、距離lの移動に要する時間tの確率分布を蓄積する。確率分布は、移動対象物毎に、移動速度の平均値ν及び標準偏差σによって予め規定された以下の式によって算出される。
tn+1:後の時刻
Ptn:先の時刻tnにおける任意の第1の点
Ptn+1:後の時刻tn+1における任意の第2の点
lPtn,Ptn+1:第1の点Ptnと第2の点Ptn+1との間の距離
g:第1の点Ptnから第2の点Ptn+1への時間tn+1−tnで移動できる確率
[Probability distribution storage unit 121]
The probability
tn + 1: Later time
Ptn: Arbitrary first point at the previous time tn
Ptn + 1: Arbitrary second point at a later time tn + 1 l Ptn, Ptn + 1 : Distance between the first point Ptn and the second point Ptn + 1 g: From the first point Ptn Probability of moving to the second point Ptn + 1 at time tn + 1−tn
[領域分割部122]
領域分割部122は、基地局毎に又は全ての基地局について、当該基地局を中心とした所定半径距離rに基づく領域(例えば円領域)を、k(k>2)等分に予め分割して設定する。
[Area Dividing Unit 122]
The
図9は、分割領域間を移動した距離を表す説明図である。 FIG. 9 is an explanatory diagram showing the distance moved between the divided areas.
図9によれば、基地局を中心とした所定半径距離rに基づく円領域が、2(k=2)等分に分割されている。ここで、時刻tnに第1の点Ptn(領域3A1)に位置する移動対象物は、時刻tn+1に第2の点Ptn+1(領域3B1)へ移動している。また、その距離は、lPtn,Ptn+1で表されている。 According to FIG. 9, the circular area based on the predetermined radial distance r centered on the base station is divided into 2 (k = 2) equal parts. Here, the moving object located at the first point Ptn (region 3A1) at time tn has moved to the second point Ptn + 1 (region 3B1) at time tn + 1. The distance is represented by l Ptn, Ptn + 1 .
図10は、k=3,4の分割領域を表す説明図である。 FIG. 10 is an explanatory diagram showing the divided areas of k = 3 and 4.
図10(a)は、基地局を中心とした所定半径距離rに基づく円領域が、3(k=3)等分に分割されている。また、図10(b)は、基地局を中心とした所定半径距離rに基づく円領域が、4(k=4)等分に分割されている。 In FIG. 10A, a circular area based on a predetermined radial distance r centered on the base station is divided into 3 (k = 3) equal parts. In FIG. 10B, a circular area based on a predetermined radial distance r centered on the base station is divided into 4 (k = 4) equal parts.
尚、等分kに基づく分割領域の角度θを、適応的に変化させるものであってもよい。図10によれば、第1の点Ptnと第2の点Ptn+1とを結ぶ直線を基準線として、複数の領域に分割されている。 Note that the angle θ of the divided region based on the equal division k may be adaptively changed. According to FIG. 10, a straight line connecting the first point Ptn and the second point Ptn + 1 is used as a reference line, and is divided into a plurality of regions.
また、所定距離半径rを、適応的に変化させるものであってもよい。例えば、時刻tnに半径rである場合、時刻tn+1には、半径r×α(α>1)とする。例えばΔtn=tn+1−tnとした場合、αはΔtnに比例して大きくなる。 Further, the predetermined distance radius r may be adaptively changed. For example, when the radius is r at time tn, the radius r × α (α> 1) is set at time tn + 1. For example, when Δtn = tn + 1−tn, α increases in proportion to Δtn.
[移動確率算出部123]
移動確率算出部123は、移動対象物毎に、確率分布蓄積部121の確率分布を用いて、先の基地局の各分割領域から後の基地局の各分割領域に対する全ての組み合わせについて移動確率を算出する。例えば図9の場合、移動対象物毎に、時刻tnにおける領域3A1の第1の点Ptnから、時刻tn+1における領域3B2の第2の点Ptn+1へ移動する確率を算出する。これは、移動対象物毎に、移動速度の確率分布が異なることを利用したものである。
[Movement probability calculation unit 123]
For each moving object, the movement
図11は、分割領域間の移動確率を算出するための任意の点の散布を表す説明図である。 FIG. 11 is an explanatory diagram showing scattering of arbitrary points for calculating the movement probability between the divided regions.
図11によれば、移動確率算出部123は、先の分割領域及び後の分割領域に複数の任意の点を散布する。そして、先の任意の点から後の任意の点へ間の距離lについて、先の基地局に接続した時刻と後の基地局に接続した時刻との間の時間tを要する移動確率を、移動対象物毎に、確率分布を用いて算出する。
According to FIG. 11, the movement
図12は、先の分割領域から後の分割領域へ任意の点を結ぶ線分それぞれに、自動車及び電車における移動確率を表す説明図である。 FIG. 12 is an explanatory diagram showing movement probabilities in a car and a train for each line segment connecting arbitrary points from the previous divided area to the subsequent divided area.
図12によれば、領域3A1及び領域3B2にそれぞれ、4個の任意の点が散布され、破線矢印によって4本の線分が表されている。先の時刻tn=9:00:20から後の時刻tn+1=9:05:20までの間の距離は、移動対象物の速度に依存する。ここで、各移動対象物の移動速度は確率分布に従うものとする。移動確率蓄積部121に蓄積された移動速度の確率分布を用いることによって、移動時間及び距離から、その移動確率が算出される。
According to FIG. 12, four arbitrary points are scattered in each of the region 3A1 and the region 3B2, and four line segments are represented by broken-line arrows. The distance between the previous time tn = 9: 00: 20 and the later time tn + 1 = 9: 05: 20 depends on the speed of the moving object. Here, it is assumed that the moving speed of each moving object follows a probability distribution. By using the probability distribution of the movement speed accumulated in the movement
図12(a)によれば、対象物「自動車」の移動速度について、平均値ν=30km/h、及び、標準偏差σ=√350であるとする。そして、その移動確率は、確率分布N(30km,350)に従うとする。線分1について、距離=3kmとすると、移動対象物「自動車」で移動したであろう移動確率は、以下のようになる。
線分2について、距離=3.2kmとすると、移動対象物「自動車」で移動したであろう移動確率は、上述の式によって、0.00142となる。
線分3について、距離=3.5kmとすると、移動対象物「自動車」で移動したであろう移動確率は、上述の式によって、0.00186となる。
線分4について、距離=3.2kmとすると、移動対象物「自動車」で移動したであろう移動確率は、上述の式によって、0.00142となる。
According to FIG. 12A, it is assumed that the moving speed of the object “automobile” is an average value ν = 30 km / h and a standard deviation σ = √350. The movement probability follows a probability distribution N (30 km, 350). Assuming that the distance of the
Assuming that the distance of the
Assuming that the distance of the
Assuming that the distance of the
図12(b)によれば、対象物「電車」の移動速度について、平均値ν=40km/h、及び、標準偏差σ=2であるとする。そして、その移動確率は、確率分布N(40km,400)に従うとする。線分1について、距離=3kmとすると、移動対象物「電車」で移動したであろう移動確率は、以下のようになる。
線分2について、距離=3.2kmとすると、移動対象物「電車」で移動したであろう移動確率は、上述の式によって、0.00247となる。
線分3について、距離=3.5kmとすると、移動対象物「電車」で移動したであろう移動確率は、上述の式によって、0.00147となる。
線分4について、距離=3.2kmとすると、移動対象物「電車」で移動したであろう移動確率は、上述の式によって、0.00142となる。
According to FIG. 12B, it is assumed that the average value ν = 40 km / h and the standard deviation σ = 2 for the moving speed of the object “train”. The movement probability follows a probability distribution N (40 km, 400). Assuming that the distance of the
Assuming that the distance of the
If the distance is 3.5 km for the
Assuming that the distance of the
次に、移動対象物毎に、全ての線分(任意の点の間)の移動確率の平均値を、先の分割領域から後の分割領域へ当該移動対象物が利用されたであろう移動確率とする
図12(a)によれば、移動対象物「自動車」が、領域3A1から領域3B2へ移動する移動確率は、以下の式によって算出される。
(0.00112+0.00142+0.00188+0.00142)/4=0.00146
図12(b)によれば、移動対象物「電車」が、領域3A1から領域3B2へ移動する移動確率は、以下の式によって算出される。
(0.00243+0.00247+0.00147+0.00245)/4=0.00220
Next, for each moving object, the average value of the moving probability of all line segments (between arbitrary points) is moved from the previous divided area to the subsequent divided area. According to FIG. 12A, the movement probability that the moving object “automobile” moves from the region 3A1 to the region 3B2 is calculated by the following equation.
(0.00112 + 0.00142 + 0.00188 + 0.00142) /4=0.00146
According to FIG. 12B, the movement probability that the moving object “train” moves from the region 3A1 to the region 3B2 is calculated by the following equation.
(0.00243 + 0.00247 + 0.00147 + 0.00245) /4=0.00220
尚、前述した図2によれば、移動確率算出部123は、移動判定部115によって移動と判定された所定数以上連続する時間窓について、移動確率を算出することとなる。即ち、移動対象物が「滞在」(停止)である場合には、移動確率は算出されない。
In addition, according to FIG. 2 mentioned above, the movement
[存在確率算出部124]
存在確率算出部124は、時間経過に応じた携帯端末と接続する基地局の変化に基づいて移動確率算出手段を繰り返すように制御する。そして、移動対象物毎に、時間経過に応じた各基地局の各分割領域の移動確率をノードとする存在確率の木構造を生成する。
[Existence probability calculation unit 124]
The existence
図13は、移動対象物「自動車」について時間経過に応じた存在確率の木構造を表す説明図である。
図14は、移動対象物「電車」について時間経過に応じた存在確率の木構造を表す説明図である。
FIG. 13 is an explanatory diagram showing a tree structure of existence probabilities according to the passage of time for the moving object “automobile”.
FIG. 14 is an explanatory diagram showing a tree structure of existence probabilities according to the passage of time for the moving object “train”.
図13及び図14によれば、携帯端末2が、時刻tn、tn+1、tn+2の時間経過に応じて、基地局3A->3B->3Cと移動した場合を表す。このとき、先の分割領域と後の分割領域との間の全ての組み合わせについて、移動確率が、木構造の枝に履歴として記録されていく。最終的に、時刻tn+2に至るまでの移動確率の乗算値が、木構造のリーフの累積移動確率となる。
FIG. 13 and FIG. 14 show a case where the
尚、時間経過に応じて木構造が深くなっていくが、データ保存領域の確保の観点から、累積確率が所定閾値以下となったノードについては、破棄することが好ましい。 It should be noted that although the tree structure becomes deeper as time elapses, it is preferable to discard a node whose cumulative probability is equal to or less than a predetermined threshold from the viewpoint of securing a data storage area.
[移動対象物推定部125]
存在確率算出部124の木構造について、存在確率(累積確率)が最も高いリーフにおける移動対象物を、当該携帯端末を所持したユーザが利用していると推定する。
[Movement object estimation unit 125]
With respect to the tree structure of the existence
図13及び図14によれば、存在確率が最も高いリーフは、図14における領域3A1->3B2->3C2を辿った存在確率0.24のリーフである。これは、移動対象物「電車」である。従って、当該携帯端末を所持するユーザは、時刻tn〜tn+2について、「電車」に搭乗していたであろうと推定することができる。 According to FIG. 13 and FIG. 14, the leaf having the highest existence probability is a leaf having the existence probability of 0.24 following the region 3A1-> 3B2-> 3C2 in FIG. This is the moving object “train”. Therefore, it can be estimated that the user who possesses the portable terminal would have boarded the “train” at times tn to tn + 2.
以上、詳細に説明したように、本発明の通信設備装置、プログラム及び方法によれば、携帯端末の測位機能を起動させることなく、通信事業者設備によって取得可能な、空間的粒度が粗く且つ時間間隔が一定でない基地局位置情報を用いて、ユーザが搭乗する移動対象物を推定することができる。 As described above in detail, according to the communication equipment device, program, and method of the present invention, the spatial granularity and time that can be acquired by the communication carrier equipment without activating the positioning function of the mobile terminal is large. It is possible to estimate a moving object on which the user is boarded using base station position information whose intervals are not constant.
前述した本発明の種々の実施形態について、本発明の技術思想及び見地の範囲の種々の変更、修正及び省略は、当業者によれば容易に行うことができる。前述の説明はあくまで例であって、何ら制約しようとするものではない。本発明は、特許請求の範囲及びその均等物として限定するものにのみ制約される。 Various changes, modifications, and omissions of the above-described various embodiments of the present invention can be easily made by those skilled in the art. The above description is merely an example, and is not intended to be restrictive. The invention is limited only as defined in the following claims and the equivalents thereto.
1 通信設備装置
10 通信インタフェース部
111 基地局位置情報管理部
112 通信履歴収集部
113 位置情報履歴生成部
114 時間窓分割部
115 移動判定部
120 通信履歴蓄積部
121 確率分布蓄積部
122 領域分割部
123 移動確率算出部
124 存在確率算出部
125 移動対象物推定部
13 アプリケーション処理部
2 携帯端末
3 基地局
DESCRIPTION OF
Claims (10)
携帯端末毎に、通信された日時刻及びその基地局位置情報を対応付けた複数の通信履歴を蓄積した通信履歴蓄積手段と、
移動対象物毎に、距離lの移動に要する時間tの確率分布を蓄積した確率分布蓄積手段と、
基地局毎に又は全ての基地局について、当該基地局を中心とした所定半径距離に基づく領域をk(k>2)等分に予め分割して設定する領域分割手段と、
前記移動対象物毎に、前記確率分布蓄積手段の確率分布を用いて、先の基地局の各分割領域から後の基地局の各分割領域に対する全ての組み合わせについて移動確率を算出する移動確率算出手段と、
時間経過に応じた前記携帯端末と接続する基地局の変化に基づいて前記移動確率算出手段を繰り返すように制御し、前記移動対象物毎に、時間経過に応じた各基地局の各分割領域の移動確率をノードとする存在確率の木構造を生成する存在確率算出手段と、
前記存在確率算出手段の木構造について、存在確率が最も高いリーフにおける移動対象物を、当該携帯端末を所持したユーザが利用していると推定する移動対象物推定手段と
を有することを特徴とする装置。 A device that is connected to a wide area wireless communication network and estimates a moving object on which a user carrying a mobile terminal is boarded,
For each portable terminal, communication history storage means for storing a plurality of communication histories in association with the date and time of communication and the base station position information;
Probability distribution accumulating means for accumulating the probability distribution of time t required for movement of distance l for each moving object;
An area dividing means for dividing and setting an area based on a predetermined radial distance centered on the base station in advance for each base station or for all base stations into k (k> 2) equal parts;
For each moving object, using the probability distribution of the probability distribution accumulating means, the movement probability calculating means for calculating the movement probability for all combinations from each divided area of the previous base station to each divided area of the subsequent base station. When,
Control to repeat the movement probability calculation means based on the change of the base station connected to the mobile terminal according to the passage of time, for each moving object, for each divided region of each base station according to the passage of time An existence probability calculating means for generating a tree structure of an existence probability having a movement probability as a node;
The tree structure of the existence probability calculating means includes a moving object estimation means for estimating that a user having the mobile terminal is using a moving object in a leaf having the highest existence probability. apparatus.
先の分割領域及び後の分割領域に複数の任意の点を散布し、先の任意の点から後の任意の点へ間の距離lについて、先の基地局に接続した時刻と後の基地局に接続した時刻との間の時間tを要する移動確率を、前記移動対象物毎に、前記確率分布を用いて算出し、
前記移動対象物毎に、複数の任意の点の間の移動確率の平均値を、先の分割領域から後の分割領域へ当該移動対象物が利用されたであろう移動確率とする
ことを特徴とする請求項1に記載の装置。 The movement probability calculation means includes
A plurality of arbitrary points are scattered in the previous divided area and the subsequent divided area, and the distance from the previous arbitrary point to the subsequent arbitrary point is connected to the previous base station and the subsequent base station. For each moving object, the movement probability that requires time t between the time of connection and the time calculated using the probability distribution is calculated,
For each moving object, an average value of moving probabilities between a plurality of arbitrary points is set as a moving probability that the moving object will be used from the previous divided area to the subsequent divided area. The apparatus according to claim 1.
tn+1:後の時刻
Ptn:先の時刻tnにおける任意の第1の点
Ptn+1:後の時刻tn+1における任意の第2の点
lPtn,Ptn+1:第1の点Ptnと第2の点Ptn+1との間の距離
g:第1の点Ptnから第2の点Ptn+1への時間tn+1−tnで移動できる確率
ことを特徴とする請求項3に記載の装置。 The probability distribution is calculated by the following formula:
tn + 1: Later time
Ptn: Arbitrary first point at the previous time tn
Ptn + 1: Arbitrary second point at a later time tn + 1 l Ptn, Ptn + 1 : Distance between the first point Ptn and the second point Ptn + 1 g: From the first point Ptn The device according to claim 3, characterized in that it has a probability of moving to the second point Ptn + 1 at time tn + 1-tn.
前記時間窓毎に、複数の基地局位置情報に基づく位置の確率分布が、多峰性である場合には「移動」と判定する移動判定手段と
を更に有し、
前記移動確率算出手段は、移動と判定された所定数以上連続する時間窓について、前記移動確率を算出する
ことを特徴とする請求項1から4のいずれか1項に記載の装置。 Time window dividing means for dividing the position information history generated by the position information history generating means into time windows (time intervals) of a predetermined time;
For each time window, there is further provided a movement determination means for determining that the position probability distribution based on the plurality of base station position information is multimodal when the position probability distribution is multimodal,
The apparatus according to any one of claims 1 to 4, wherein the movement probability calculation means calculates the movement probability for a predetermined number of time windows that are determined to move.
(S1)任意の点(位置情報)を、最初の中心点とし、
(S2)中心点から、第1の閾値の半径の円に含まれる点を用いて、重心を算出し、
(S3)重心と現在の中心点との差が、第2の閾値以下であるか否かを判定し、
(S4)S3によって偽と判定された場合、その重心を次の中心点として、再びS2へ戻って、変化量が第2の閾値以下に収まるまで繰り返し、
(S5)S3によって真と判定された場合、その重心を代表点位置情報とし、
最後に、当該時間窓について、代表点位置情報の種類数が、複数個の場合には「移動」と判定することを特徴とする請求項5に記載の装置。 The movement determination means is provided for each time window.
(S1) An arbitrary point (position information) is set as the first center point,
(S2) Calculate the center of gravity from the center point using the points included in the circle with the first threshold radius,
(S3) Determine whether the difference between the center of gravity and the current center point is less than or equal to the second threshold,
(S4) If it is determined to be false by S3, the center of gravity is set as the next center point, the process returns to S2 again, and the process is repeated until the amount of change falls below the second threshold.
(S5) When determined to be true by S3, the center of gravity is used as representative point position information,
6. The apparatus according to claim 5, wherein when there are a plurality of types of representative point position information for the time window, it is determined as “move”.
基地局識別子及び基地局位置情報を対応付けて記憶する基地局位置情報管理手段と、
携帯端末を配下に接続させる基地局から、携帯端末毎における通信された日時刻及びその基地局識別子の通信履歴を収集する通信履歴収集手段と、
前記基地局位置情報管理手段を用いて、前記通信履歴毎に、前記基地局識別子に対応する基地局位置情報を更に対応付ける位置情報履歴生成手段と
を更に有することを特徴とする通信設備装置。 A communication facility apparatus in which the apparatus according to any one of claims 1 to 7 is connected to a wide-area wireless communication network, in order to store a communication history in the communication history storage unit.
Base station location information management means for storing a base station identifier and base station location information in association with each other;
From a base station to which the mobile terminal is connected, a communication history collecting means for collecting a communication history of the date and time of communication for each mobile terminal and its base station identifier,
A communication equipment apparatus, further comprising position information history generation means for further associating the base station position information corresponding to the base station identifier for each communication history using the base station position information management means.
携帯端末毎に、通信された日時刻及びその基地局位置情報を対応付けた複数の通信履歴を蓄積した通信履歴蓄積手段と、
移動対象物毎に、距離lの移動に要する時間tの確率分布を蓄積した確率分布蓄積手段と、
基地局毎に又は全ての基地局について、当該基地局を中心とした所定半径距離に基づく領域をk(k>2)等分に予め分割して設定する領域分割手段と、
前記移動対象物毎に、前記確率分布蓄積手段の確率分布を用いて、先の基地局の各分割領域から後の基地局の各分割領域に対する全ての組み合わせについて移動確率を算出する移動確率算出手段と、
時間経過に応じた前記携帯端末と接続する基地局の変化に基づいて前記移動確率算出手段を繰り返すように制御し、前記移動対象物毎に、時間経過に応じた各基地局の各分割領域の移動確率をノードとする存在確率の木構造を生成する存在確率算出手段と、
前記存在確率算出手段の木構造について、存在確率が最も高いリーフにおける移動対象物を、当該携帯端末を所持したユーザが利用していると推定する移動対象物推定手段と
してコンピュータを機能させることを特徴とするプログラム。 A program that is connected to a wide area wireless communication network and that functions as a computer mounted on a device that estimates a moving object on which a user carrying a mobile terminal is boarded,
For each portable terminal, communication history storage means for storing a plurality of communication histories in association with the date and time of communication and the base station position information;
Probability distribution accumulating means for accumulating the probability distribution of time t required for movement of distance l for each moving object;
An area dividing means for dividing and setting an area based on a predetermined radial distance centered on the base station in advance for each base station or for all base stations into k (k> 2) equal parts;
For each moving object, using the probability distribution of the probability distribution accumulating means, the movement probability calculating means for calculating the movement probability for all combinations from each divided area of the previous base station to each divided area of the subsequent base station. When,
Control to repeat the movement probability calculation means based on the change of the base station connected to the mobile terminal according to the passage of time, for each moving object, for each divided region of each base station according to the passage of time An existence probability calculating means for generating a tree structure of an existence probability having a movement probability as a node;
For the tree structure of the existence probability calculating means, the computer is caused to function as a moving object estimating means for estimating that a moving object in a leaf having the highest existence probability is being used by a user having the portable terminal. Program.
携帯端末毎に、通信された日時刻及びその基地局位置情報を対応付けた複数の通信履歴を蓄積した通信履歴蓄積部と、
移動対象物毎に、距離lの移動に要する時間tの確率分布を蓄積した確率分布蓄積部と、
基地局毎に又は全ての基地局について、当該基地局を中心とした所定半径距離に基づく領域をk(k>2)等分に予め分割して設定する領域分割部と
を有し、
前記通信履歴蓄積部に蓄積された通信履歴について、前記移動対象物毎に、前記確率分布蓄積手段の確率分布を用いて、先の基地局の各分割領域から後の基地局の各分割領域に対する全ての組み合わせについて移動確率を算出する第1のステップと、
時間経過に応じた前記携帯端末と接続する基地局の変化に基づいて前記移動確率算出手段を繰り返すように制御し、前記移動対象物毎に、時間経過に応じた各基地局の各分割領域の移動確率をノードとする存在確率の木構造を生成する第2のステップと、
第2のステップの木構造について、存在確率が最も高いリーフにおける移動対象物を、当該携帯端末を所持したユーザが利用していると推定する第3のステップと
を有することを特徴とする方法。 For a communication equipment connected to a wide area wireless communication network, a method for estimating a moving object on which a user carrying a mobile terminal is boarded,
For each portable terminal, a communication history storage unit that stores a plurality of communication histories in association with the date and time of communication and the base station position information,
For each moving object, a probability distribution accumulating unit that accumulates a probability distribution of time t required for movement of distance l,
For each base station or for all base stations, an area dividing unit that preliminarily divides and sets an area based on a predetermined radial distance centered on the base station into k (k> 2) equal parts,
For the communication history stored in the communication history storage unit, for each moving object, using the probability distribution of the probability distribution storage means, from each divided region of the previous base station to each divided region of the subsequent base station A first step of calculating movement probabilities for all combinations;
Control to repeat the movement probability calculation means based on the change of the base station connected to the mobile terminal according to the passage of time, for each moving object, for each divided region of each base station according to the passage of time A second step of generating a tree structure of existence probabilities having a movement probability as a node;
And a third step of estimating that the user having the mobile terminal is using the moving object in the leaf having the highest existence probability for the tree structure in the second step.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012272316A JP6075725B2 (en) | 2012-12-13 | 2012-12-13 | Apparatus, program, and method for estimating moving object on which user having portable terminal boarding |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012272316A JP6075725B2 (en) | 2012-12-13 | 2012-12-13 | Apparatus, program, and method for estimating moving object on which user having portable terminal boarding |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014119798A true JP2014119798A (en) | 2014-06-30 |
| JP6075725B2 JP6075725B2 (en) | 2017-02-08 |
Family
ID=51174614
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012272316A Active JP6075725B2 (en) | 2012-12-13 | 2012-12-13 | Apparatus, program, and method for estimating moving object on which user having portable terminal boarding |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6075725B2 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015170144A (en) * | 2014-03-07 | 2015-09-28 | Kddi株式会社 | Device, program and method for estimating place of stay of user carrying around mobile terminal |
| JP2016134731A (en) * | 2015-01-19 | 2016-07-25 | 株式会社Kddi研究所 | Device, program, and method for estimating used route from communication history |
| JP2016133488A (en) * | 2015-01-22 | 2016-07-25 | 株式会社Kddi研究所 | Device, program and method for estimating travel speed using plural estimation distances |
| JP2017143472A (en) * | 2016-02-12 | 2017-08-17 | Kddi株式会社 | Device, program and method for estimating user's movement object |
| JP2017219466A (en) * | 2016-06-09 | 2017-12-14 | 株式会社デンソー | Radar system |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001167378A (en) * | 1999-12-10 | 2001-06-22 | Matsushita Electric Ind Co Ltd | Method and device for estimating road traffic congestion |
| JP2004228781A (en) * | 2003-01-21 | 2004-08-12 | Ntt Docomo Inc | Location deciding method, mobile communication system, and location deciding apparatus |
| JP2006012144A (en) * | 2003-02-25 | 2006-01-12 | Matsushita Electric Ind Co Ltd | Mobile terminal |
| JP2008152655A (en) * | 2006-12-19 | 2008-07-03 | Ntt Docomo Inc | Information service provision system, object behavior estimation apparatus and object behavior estimation method |
| JP2012085095A (en) * | 2010-10-12 | 2012-04-26 | Kddi Corp | Device, program, and method for estimating significant area of user holding portable terminal |
| JP2014116808A (en) * | 2012-12-10 | 2014-06-26 | Kddi Corp | Device, program and method for estimating staying place of user carrying portable terminal |
| JP2014191531A (en) * | 2013-03-27 | 2014-10-06 | Kddi Corp | Device, program and method for estimating place of short-time stay of user carrying mobile terminal |
-
2012
- 2012-12-13 JP JP2012272316A patent/JP6075725B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001167378A (en) * | 1999-12-10 | 2001-06-22 | Matsushita Electric Ind Co Ltd | Method and device for estimating road traffic congestion |
| JP2004228781A (en) * | 2003-01-21 | 2004-08-12 | Ntt Docomo Inc | Location deciding method, mobile communication system, and location deciding apparatus |
| JP2006012144A (en) * | 2003-02-25 | 2006-01-12 | Matsushita Electric Ind Co Ltd | Mobile terminal |
| JP2008152655A (en) * | 2006-12-19 | 2008-07-03 | Ntt Docomo Inc | Information service provision system, object behavior estimation apparatus and object behavior estimation method |
| JP2012085095A (en) * | 2010-10-12 | 2012-04-26 | Kddi Corp | Device, program, and method for estimating significant area of user holding portable terminal |
| JP2014116808A (en) * | 2012-12-10 | 2014-06-26 | Kddi Corp | Device, program and method for estimating staying place of user carrying portable terminal |
| JP2014191531A (en) * | 2013-03-27 | 2014-10-06 | Kddi Corp | Device, program and method for estimating place of short-time stay of user carrying mobile terminal |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015170144A (en) * | 2014-03-07 | 2015-09-28 | Kddi株式会社 | Device, program and method for estimating place of stay of user carrying around mobile terminal |
| JP2016134731A (en) * | 2015-01-19 | 2016-07-25 | 株式会社Kddi研究所 | Device, program, and method for estimating used route from communication history |
| JP2016133488A (en) * | 2015-01-22 | 2016-07-25 | 株式会社Kddi研究所 | Device, program and method for estimating travel speed using plural estimation distances |
| JP2017143472A (en) * | 2016-02-12 | 2017-08-17 | Kddi株式会社 | Device, program and method for estimating user's movement object |
| JP2017219466A (en) * | 2016-06-09 | 2017-12-14 | 株式会社デンソー | Radar system |
| WO2017213199A1 (en) * | 2016-06-09 | 2017-12-14 | 株式会社デンソー | Radar device and method for detecting object by radar device |
| US10877140B2 (en) | 2016-06-09 | 2020-12-29 | Denso Corporation | Radar device and method of detecting object using radar device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6075725B2 (en) | 2017-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108537351B (en) | Method and device for determining recommended boarding point | |
| EP2247126B1 (en) | Predicting presence of a mobile user equipment | |
| JP6053027B2 (en) | Apparatus, program, and method for searching for user who takes similar movement route | |
| US9277362B2 (en) | Method and apparatus for generating and using location information | |
| US20150141045A1 (en) | Geofence | |
| JP6075725B2 (en) | Apparatus, program, and method for estimating moving object on which user having portable terminal boarding | |
| JP6049186B2 (en) | Apparatus, program, and method for estimating staying place of user having portable terminal | |
| Neidhardt et al. | Estimating locations and coverage areas of mobile network cells based on crowdsourced data | |
| JP6169022B2 (en) | Apparatus, program, and method for estimating staying place of user having portable terminal | |
| CN104994577B (en) | System for integrating action positioning of heterogeneous network and application method thereof | |
| CN104159197A (en) | Low-cost terminal positioning method, smart mobile terminal and system | |
| Lind et al. | A new approach for mobile positioning using the CDR data of cellular networks | |
| JP5986028B2 (en) | Apparatus, program, and method for estimating short-time stay location of user having portable terminal | |
| Chen et al. | Location prediction for large scale urban vehicular mobility | |
| JP6223302B2 (en) | Apparatus, program, and method capable of determining stay of user having portable terminal | |
| JP6551999B2 (en) | Device, program and method for estimating moving object of user | |
| CN112739984A (en) | Mobile phone multimodal position sensing | |
| JP6433059B2 (en) | Apparatus, program and method for positioning mobile terminal based on communication record | |
| KR101867548B1 (en) | A method of retrieving a user's context using a mobile device based on wireless signal characteristics | |
| AU2016433153B2 (en) | Estimated user location from cellular telephony data | |
| JP6396811B2 (en) | Apparatus, program and method for estimating route used from communication history | |
| JP6368230B2 (en) | Apparatus, program and method for estimating stay or movement from determination results using different distances | |
| JP6369943B2 (en) | Apparatus, program, and method for estimating moving speed using a plurality of estimation distances | |
| JP6341831B2 (en) | Apparatus, program, and method for estimating data traffic volume for each area | |
| JP6672036B2 (en) | Mobile terminal, system, program, and method for executing terminal positioning in base station positioning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160512 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160704 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170104 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6075725 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |