JP2014014166A - 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 - Google Patents
複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 Download PDFInfo
- Publication number
- JP2014014166A JP2014014166A JP2013193758A JP2013193758A JP2014014166A JP 2014014166 A JP2014014166 A JP 2014014166A JP 2013193758 A JP2013193758 A JP 2013193758A JP 2013193758 A JP2013193758 A JP 2013193758A JP 2014014166 A JP2014014166 A JP 2014014166A
- Authority
- JP
- Japan
- Prior art keywords
- motion vector
- current block
- adjacent
- partition
- motion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/557—Motion estimation characterised by stopping computation or iteration based on certain criteria, e.g. error magnitude being too large or early exit
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/521—Processing of motion vectors for estimating the reliability of the determined motion vectors or motion vector field, e.g. for smoothing the motion vector field or for correcting motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/124—Quantisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/13—Adaptive entropy coding, e.g. adaptive variable length coding [AVLC] or context adaptive binary arithmetic coding [CABAC]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/14—Coding unit complexity, e.g. amount of activity or edge presence estimation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/182—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a pixel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Theoretical Computer Science (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Image Analysis (AREA)
Abstract
【課題】 デコーダに伝送される情報量を減らすことができるビデオコーディングに係り、複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法を提供する。
【解決手段】 現在ブロックと、現在ブロックに隣接した複数個のパーティションとの空間類似度を計算し、この計算された空間類似度に基づいて、現在ブロックに隣接した複数個のパーティションのうち、少なくとも一つを選択し、この選択されたパーティションの動きベクトルを、現在ブロックの動きベクトルとして推定することを特徴とする動きベクトル推定方法である。
【選択図】 図3A
【解決手段】 現在ブロックと、現在ブロックに隣接した複数個のパーティションとの空間類似度を計算し、この計算された空間類似度に基づいて、現在ブロックに隣接した複数個のパーティションのうち、少なくとも一つを選択し、この選択されたパーティションの動きベクトルを、現在ブロックの動きベクトルとして推定することを特徴とする動きベクトル推定方法である。
【選択図】 図3A
Description
本発明は、ビデオのコーディング及びデコーディングの方法及び装置に係り、複数の動きベクトル・プレディクタを使用して動きベクトルを推定することに関する。
インターフレーム及びイントラフレームの予測は、二種の主なビデオ符号化技術である。イントラフレーム予測は、単一フレーム内で、隣接したピクセルのグレイレベル間の強い相関度(correlation)に基づいたビデオ符号化技術である。インターフレーム予測は、ビデオシーケンスにおいて、連続するフレーム間での類似性(similarities)に基づいたビデオ符号化技術である。動く画面で、急激な変化がない限り、動き画面の多くの部分は、連続するフレーム間にほとんど変化しない。特に、動きベクトル予測は、インターフレーム予測で使われるビデオ符号化技術のうちの一つである。動きベクトル予測は、動き予測によって計算された動きベクトルを差別符号化(differentially encoding)することによってイメージを処理するための技術である。一般的に、あるブロックの動きベクトルは、隣接パーティションの動きベクトルと密接な相関関係を有する。そのために、隣接パーティションの動きベクトルから現在ブロックの動きベクトルを予測し、その差分ベクトルのみを符号化することによって、符号化しなければならないビット量を減らすことができる。
図1A及び図1Bは、従来技術による動き予測に使われる隣接パーティションの例示である。
図1Aは、現在マクロブロックEと隣接したパーティションA,B,Cの形状が同じ場合であり、動きベクトルの予測符号化は、左側ブロックA、上端ブロックB、右側上端ブロックCの動きベクトル(MV:motion
vector)を使用し、水平成分と垂直成分との中間値(median value)を使用する。
vector)を使用し、水平成分と垂直成分との中間値(median value)を使用する。
図1Bは、現在マクロブロックEと隣接パーティションとの形状が異なる場合であり、次のような方法によって、現在ブロックEの動きベクトルを予測する。
(1)符号化しようというブロックEの左側にある隣接パーティションがさまざまなブロックに分けられている場合、そのうちで最も上端に位置したブロックAを予測に使用する。また、符号化しようというブロックEの上端にある隣接パーティションがいくつかに分けられている場合、そのうちで最も左側に位置したブロックBを予測に使用する。その後、動きベクトルの予測符号化のために、左側ブロックA、上端ブロックB、右側上端ブロックCの動きベクトル(MV)を使用し、水平成分と垂直成分との中間値を使用する。
(2)ただし例外的に、符号化しようというマクロブロックEが正方形ではない場合(16×8ピクセルまたは8×16)、中間値を使用せずに動き補償ブロックサイズによって、次の通りに動きベクトルを予測する。
(i)符号化しようというブロックが16×8ピクセルである場合、上端ブロックは、ブロックBを、下端ブロックは、ブロックAを予測に使用する。
(ii)符号化しようというブロックが8×16ピクセルである場合、左側ブロックは、ブロックAを、右側ブロックは、ブロックCを予測に使用する。
(3)スキップマクロブロックモードである場合は、前述の(1)と同じである。
前述のように、現在ブロックの動きベクトルを推定するために、一つ以上の隣接ブロックが使われうる。しかし、従来技術によれば、使われうる隣接ブロックは典型的なものばかりであり、特に、典型的な隣接ブロックのうち、現在ブロックと類似したブロック(すなわち、現在ブロックと同じ動きを有するブロック)は有用であるが、それ以外のブロックは有用ではない。従って、現在ブロックの動きベクトルを正確に推定するために、典型的な隣接ブロック以外にも、他の複数個の隣接ブロックを使用する必要がある。また、かような場合には、使われた隣接ブロックの情報をシグナリングする必要がある。
本発明は、前記のような問題点を解決するために創出されたものであり、現在ブロックの動きベクトル推定のために有用な隣接パーティションを推定し、推定されたパーティションの情報をシグナリングする方法及び装置を提供するところにその目的がある。
前記目的を達成するために、本発明の第1実施形態による現在ブロックの動きベクトルを推定する方法において、前記現在ブロックと、前記現在ブロックに隣接した複数個のパーティションとの空間類似度を計算する段階と、前記計算された空間類似度に基づいて、前記現在ブロックに隣接した複数個のパーティションのうち、少なくとも一つを選択する段階と、前記選択されたパーティションの動きベクトルを、前記現在ブロックの動きベクトルとして推定する段階とを含むことを特徴とする。
望ましくは、前記空間類似度の計算時に、前記現在ブロックのピクセルの平均と、前記現在ブロックに隣接した複数個のパーティションそれぞれのピクセルの平均とを利用することを特徴とし、前記現在ブロックのピクセルの平均は、前記現在ブロックに隣接したパーティションのピクセルのうち、前記現在ブロックと接したピクセルを利用して計算することを特徴とする。
望ましくは、前記空間類似度の計算時に、前記現在ブロックに隣接したパーティションに対して、エンコーダ及びデコーダ間にあらかじめ約束された空間的順序によって、空間類似度を付与することを特徴とする。
望ましくは、前記動きベクトル推定方法は、前記現在ブロックの動きベクトルと、前記推定された現在ブロックの動きベクトルとの動き情報、及び前記現在ブロックの動きベクトルの再生のためのパーティション情報を伝送する段階をさらに含むことを特徴とする。
望ましくは、前記推定する段階で、前記選択されたパーティションが複数個である場合、それらのうち、任意のいずれか1つのパーティションの動きベクトルを、前記現在ブロックの動きベクトルとして推定する段階であることを特徴とする。
望ましくは、前記推定する段階で、前記選択されたパーティションが複数個である場合、選択されたパーティションそれぞれの動きベクトルの中間値を、前記現在ブロックの動きベクトルとして推定する段階であることを特徴とする。
望ましくは、前記推定する段階で、前記選択されたパーティションが複数個である場合、前記選択されたパーティションの動きベクトルそれぞれに重み付けされたベクトルを、前記現在ブロックの動きベクトルとして推定する段階であることを特徴とする。
望ましくは、前記推定する段階で、前記現在ブロックに空間的に対応する位置にある参照フレーム内のパーティションの動きベクトルを、前記現在ブロックの動きベクトルとして推定する段階をさらに含むことを特徴とする。
望ましくは、前記推定する段階で、前記選択されたパーティションが複数個である場合、前記選択されたパーティションの動きベクトルそれぞれに重み付けされたベクトルを、前記現在ブロックの動きベクトルとして推定する段階であることを特徴とする。
望ましくは、前記推定する段階で、前記現在ブロックに空間的に対応する位置にある参照フレーム内のパーティションの動きベクトルを、前記現在ブロックの動きベクトルとして推定する段階をさらに含むことを特徴とする。
前記技術的課題を解決するために、本発明による現在ブロックの動きベクトルを推定する方法において、前記現在ブロックに隣接した複数個のパーティションの動きベクトルを利用して少なくとも1つの参照フレームを検索し、前記現在ブロックに対応するブロックを検索する段階と、前記検索されたブロックそれぞれに隣接したピクセルと、前記現在ブロックに隣接したピクセルとの類似度を計算する段階と、前記計算結果に基づいて、前記パーティションの動きベクトルのうち一つを、前記現在ブロックの動きベクトルとして推定する段階とを含むことを特徴とする。
本発明の第2実施形態によれば、前記方法を実行するためのプログラムが記録されたコンピュータで読み取り可能な記録媒体が提供される。
本発明の第3実施形態によれば、現在ブロックに隣接した複数個のパーティションの動きベクトルを使用して現在ブロックの動きベクトルを推定するための方法において、前記現在ブロックと、前記現在ブロックに隣接した複数個のパーティションとの空間類似度を計算する空間類似度計算部と、前記計算された空間類似度に基づいて、前記現在ブロックに隣接した複数個のパーティションのうち、少なくとも一つを選択するパーティション選択部と、前記選択されたパーティションの動きベクトルを、前記現在ブロックの動きベクトルとして推定する動きベクトル推定部とを含むことを特徴とする。
本発明の第4実施形態によれば、ビデオエンコーダが提供されるが、前記エンコーダは、現在ブロックと、前記現在ブロックに隣接した複数個のパーティションそれぞれの動きベクトルとを生成する動き推定部と、前記現在ブロックと、前記現在ブロックに隣接した複数個のパーティションとの空間類似度を計算し、前記計算された空間類似度に基づいて、前記現在ブロックに隣接した複数個のパーティションのうち、少なくとも一つを選択して、前記選択されたパーティションの動きベクトルを、前記現在ブロックの動きベクトルとして推定する動きベクトル推定部と、前記現在ブロックの動きベクトルと、前記推定された現在ブロックの動きベクトルとの動き情報、及び前記現在ブロックの動きベクトルの再生のためのパーティション情報をエントロピ符号化するエントロピ符号化部とを含むことを特徴とする。
本発明の第5実施形態によれば、ビデオデコーダが提供されるが、前記デコーダは、符号化されたビットストリームから動き情報及びパーティション情報をエントロピ復号化するエントロピ復号化部と、前記復号化されたパーティション情報に基づいて、前記現在ブロックと、前記現在ブロックに隣接した複数個のパーティションとの空間類似度を計算し、前記計算された空間類似度に基づいて、前記現在ブロックに隣接した複数個のパーティションのうち、少なくとも一つを選択し、前記選択されたパーティションの動きベクトルを、前記現在ブロックの動きベクトルとして推定し、前記推定された動きベクトルに前記動き情報を加算し、現在ブロックの動きベクトルを再生する動きベクトル推定部と、前記再生された動きベクトルを利用し、現在ブロックを復元するマクロブロック復元部とを含むことを特徴とする。
本発明の第6実施形態によれば、デコーディング方法が提供されるが、前記方法は、符号化されたビットストリームから動き情報及びパーティション情報をエントロピ復号化する段階と、前記復号化されたパーティション情報に基づいて、現在ブロックと、前記現在ブロックに隣接した複数個のパーティションとの空間類似度を計算し、前記計算された空間類似度に基づいて、前記現在ブロックに隣接した複数個のパーティションのうち、少なくとも一つを選択し、前記選択されたパーティションの動きベクトルを、前記現在ブロックの動きベクトルとして推定し、前記推定された動きベクトルに前記動き情報を加算し、現在ブロックの動きベクトルを再生する段階と、前記再生された動きベクトルを利用し、現在ブロックを復元する段階とを含むことを特徴とする。
本発明の第7実施形態によれば、前記方法を実行するためのプログラムが記録されたコンピュータで読み取り可能な記録媒体が提供される。
本発明の例示的な実施形態によれば、現在ブロックの動きベクトル推定のために有用なパーティションを推定し、推定されたパーティションの情報をシグナリングすることによって、デコーダに伝送になる情報量を減らすことができる。
以下、添付した図面を参照しつつ、本発明による複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法の望ましい実施形態について詳細に説明する。各図面の構成要素に参照符号を付加するにおいて、同じ構成要素に限っては、たとえ他の図面上に表示されても、可能な限り同じ符号で表記されているということに留意せねばならない。また、下記の説明では、具体的な回路の構成素子のような多くの特定事項が図示されているが、それらは、本発明のさらに全般的な理解を助けるために提供されたものであり、かような特定事項なしにも本発明が実施されうることは、当該技術分野で当業者には自明であろう。そして、本発明を説明するにおいて、関連した公知機能または構成に係る具体的な説明が本発明の要旨を曖昧にすると判断される場合には、その詳細な説明を省略する。
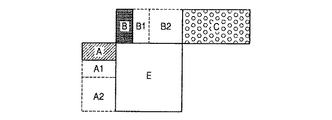
図2は、本発明の一実施形態による、動き予測に使われる隣接パーティションの例示を図示している。図2を参照するに、現在ブロックEの動きベクトル推定のために、従来技術によるパーティションA,B,C以外にも、他のパーティションA1,A2,B1,B2を使用できる。望ましくは、現在ブロックEのサイズは、16×16ピクセルからなるマクロブロックであり、隣接したパーティションのサイズは、現在ブロックEより小さく、例えば、16×8ピクセル、8×16ピクセル、8×4ピクセル、8×4ピクセル、4×4ピクセルのうち、いずれか一つからなる。
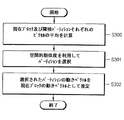
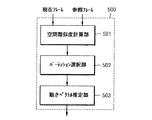
図3Aは、本発明の一実施形態による現在ブロックの動きベクトル推定方法を記述するフローチャートであり、図4Aは、本発明の一実施形態による、現在ブロックと隣接パーティションとの空間類似度を計算するための概念図である。
図3Aを参照するに、段階300で、現在ブロックEに含まれたピクセルの平均と、現在ブロックに隣接したパーティションA,B,C,A1,A2,B1,B2,Cそれぞれに係るピクセルの平均とを計算する。段階300で、ピクセルの平均を計算する理由は、現在ブロックEのような空間類似度(spatial similarity)を有する隣接パーティションを選択するためである。
段階301では、段階300で計算された平均を利用し、現在ブロックEと類似した隣接パーティションを、現在ブロックのプレディクタとして選択する。プレディクタという用語は、動きベクトル差(MVD:motion vector difference)を求めるために、現在ブロックと比較されるブロックを意味する。
さらに具体的に技術すれば、現在ブロックのピクセル平均を第1平均、隣接パーティションのピクセル平均を第2平均とすれば、第1平均と第2平均との差の絶対値が所定の基準値以下である場合、隣接パーティションを現在ブロックのプレディクタとして選択する。
望ましくは、空間類似度の計算時に、現在ブロックのピクセルの平均、及び現在ブロックに隣接した複数個のパーティションそれぞれのピクセルの平均を利用することを特徴とし、現在ブロックのピクセルの平均は、現在ブロックに隣接したパーティションのピクセルのうち、現在ブロックと接したピクセルを利用して計算することを特徴とする。また、空間類似度の計算時に、現在ブロックに隣接したパーティションに対して、エンコーダ及びデコーダ間にあらかじめ約束された空間的順序によって、空間類似度を付与することを特徴とする。
段階302では、段階301で選択されたパーティションの動きベクトルを、現在ブロックの動きベクトルとして推定する。望ましくは、選択されたパーティションは、2以上であり、選択されたパーティションが複数個である場合について、以下の図4Aを参照して記述する。
図4Aは、本発明の一実施形態による、現在ブロックと隣接パーティションとの空間類似度を計算するための概念図である。図4Aを参照するに、現在ブロックEは、16×16ピクセルからなるマクロブロックであり、隣接したパーティションのうち、パーティションAは8×4ピクセル、パーティションA1は8×4ピクセル、パーティションA2は8×8ピクセル、パーティションBは4×8ピクセル、パーティションB1は4×8ピクセル、パーティションB2は8×8ピクセル、パーティションCは16×8ピクセルからなるとする。また、現在ブロックEのピクセルの平均と、隣接パーティションA,A1,A2,B,B1,B2,Cそれぞれの平均との絶対値の差を比較した結果、所定の基準値以下を有したパーティションが、A2,B1,B2であると仮定する。
本発明の一実施形態によれば、次のような(i)、(ii)、(iii)または(iv)によって、現在ブロックEの動きベクトルを推定できる。
すなわち、(i)パーティションA2,B1,B2のうち、いずれか一つを任意に選択し、選択されたパーティションの動きベクトルを、現在ブロックの動きベクトルとして推定したり、
(ii)パーティションA2,B1,B2の任意の組み合わせ、例えば、3C2のような式(formula)で選択し、選択されたパーティションの動きベクトルのx成分及びy成分の中間値(median value)を、現在ブロックの動きベクトルとして推定したり、または
(iii)パーティションそれぞれの動きベクトルを、それぞれMVPA2、MVPB1、MVPB2とすれば、それらに重み付けされたベクトル、例えば、α*MVPA2+β*MVPB1+γ*MVPB2を、現在ブロックの動きベクトルとして推定できる。
(ii)パーティションA2,B1,B2の任意の組み合わせ、例えば、3C2のような式(formula)で選択し、選択されたパーティションの動きベクトルのx成分及びy成分の中間値(median value)を、現在ブロックの動きベクトルとして推定したり、または
(iii)パーティションそれぞれの動きベクトルを、それぞれMVPA2、MVPB1、MVPB2とすれば、それらに重み付けされたベクトル、例えば、α*MVPA2+β*MVPB1+γ*MVPB2を、現在ブロックの動きベクトルとして推定できる。
(iv)現在ブロックに空間的に対応する位置にある参照フレーム内のパーティションの動きベクトルを、前記現在ブロックの動きベクトルとして推定できる。時間的に近い参照フレーム内の現在ブロックに空間的に対応する位置、すなわち、参照フレームで、現在ブロックと同じ位置にあるパーティションは、現在ブロックと同じ動きを示す確率が高く、従って、対応する位置にあるパーティションの動きベクトルを、現在ブロックの動きベクトルとして推定できる。
望ましくは、パーティション情報は、デコーダとのあらかじめ予約されたルールにのっとる。パーティション情報の例として、空間類似度を有したパーティションのうち、左側にあるパーティションの動きベクトルを、現在ブロックの動きベクトルとして推定するようにするか、または各パーティションの動きベクトルの中間値を、現在ブロックの動きベクトルとして推定できる。また、重み付けを使用する場合には、重み付け係数(α,β,γ)がパーティションタイプとしてデコーダに伝送されねばならない。
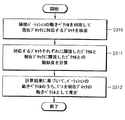
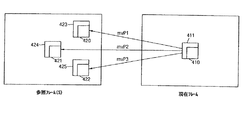
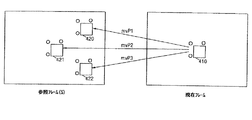
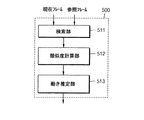
図3Bは、本発明の他の実施形態による現在ブロックの動きベクトル推定方法を記述するフローチャートであり、図4B及び図4Cは、本発明の一実施形態による、現在ブロックに隣接したピクセルと、現在ブロックに対応するブロックそれぞれに隣接したピクセルとの類似度を計算するための概念図である。
図3Bを参照するに、段階310で、現在ブロック410に隣接した複数個のパーティションA,B,C,A1,A2,B1,B2,Cの動きベクトルを利用し、少なくとも1つの参照フレームを検索し、現在ブロックに対応するブロック420ないし422を検索する。ここで、現在ブロック410は、図3Aの現在ブロックEと同じブロックであると仮定する。
現在ブロック410に隣接した複数個のパーティションA,B,C,A1,A2,B1,B2,Cの動きベクトルが、現在ブロック410の動きベクトルとして推定される。例えば、図3AのパーティションAの動きベクトルがMVP1であり、パーティションBの動きベクトルがMVP2であり、パーティションCの動きベクトルがMVP3になりうる。
段階311では、段階310で検索された現在ブロック410に対応するブロック420ないし422それぞれに隣接したピクセル423ないし425と、現在ブロック410に隣接したピクセル411との類似度を計算する。
望ましくは、対応するブロック420ないし422それぞれに隣接したピクセル423ないし425と、現在ブロック410に隣接したピクセル411とのSAD(sum of absolute difference)を計算する方法で類似度を計算できる。
段階311で、SADを計算するにおいて、必ずしも現在ブロック410及び対応するブロック420ないし422に隣接したあらゆるピクセル411及び423ないし425を利用する必要はない。図4Cに図示されているように、それぞれのブロック410及び420ないし422に隣接したピクセルのうち、一部についてのみSADを計算して類似度を計算できる。図4Cでは、それぞれのブロック410及び420ないし422に隣接したピクセルのうち、左側上部、右側上部及び左側下部に隣接したピクセルだけを、類似度計算に利用した。
段階312では、段階311で計算された類似度に基づいて、現在ブロック410に隣接した複数個のパーティションA,B,C,A1,A2,B1,B2,Cの動きベクトルのうち一つを、現在ブロックの動きベクトルとして推定する。
段階311で、SADを計算した場合には、SADが最も小さいピクセルに隣接したブロックを検索するのに利用された動きベクトルが、現在ブロックの動きベクトルとして推定される。例えば、現在ブロックに隣接したピクセル411と、MVP1によって検索されたブロック420に隣接したピクセル423とのSADが最も小さく、類似度が最も高いと計算されたならば、MVP1、すなわち、対応するブロック410を検索するために利用された動きベクトルが、現在ブロックの動きベクトルとして推定される。
このとき、必ずしも、SADが最も小さいピクセルに隣接したブロックを検索するのに利用された動きベクトルを、現在ブロックの動きベクトルとして推定するというわけではない。SAD値が最も小さいとしても、現在ブロックの全体R−Dコスト(rate distortion cost)を考慮したとき、適切に推定された動きベクトルではないこともある。従って、SADが小さい順にN個、すなわち、複数の候補を選択し、選択された候補のうち、R−Dコストが良好な動きベクトルを、現在ブロックの動きベクトルとして推定する。
この場合、複数の候補のうち、いかなる動きベクトルが現在ブロックの動きベクトルとして推定されたかを示すための情報が、デコーダに伝送されねばならない。
図4Bに図示された動きベクトルMVP1,MVP2及びMVP3のうち、MVP1及びMVP2がSADが小さいと計算された場合を例にして説明する。SADは、MVP1を現在ブロックの動きベクトルとして推定した場合が、さらに小さいと仮定する。2つの動きベクトルMVP1及びMVP2を、現在ブロックの動きベクトルとして推定して符号化し、符号化の結果、MVP2を動きベクトルとして推定した場合、R−Dコストがさらに良好であると判定されたとすれば、MVP2を現在ブロックの動きベクトルとして推定する。
また、図3B、図4B及び図4Cと関連して前述のところのように類似度を計算するにおいて、ブロック410及び420ないし422の境界にすぐに隣接したピクセル411及び423ないし425を利用する必要もない。ブロック410及び420ないし422と相関性を有しているピクセルであるならば、それぞれのブロック410及び420ないし422の境界にすぐに隣接せずに、所定の距離ほど離れているピクセルを利用することもできる。
前述の方法は一実施形態に過ぎず、前述の方法以外にも、多様な組み合わせが可能であるという点は、当分野の熟練者であるならば、十分に理解できるであろう。
図5Aは、本発明の一実施形態による動きベクトル推定装置500の構成図であり、空間類似度計算部501、パーティション選択部502及び動きベクトル推定部503を含んでなる。
図5Aを参照するに、空間類似度計算部501は、現在ブロックEに含まれたピクセルの平均と、現在ブロックに隣接したパーティションA,B,C,A1,A2,B1,B2,Cそれぞれに係るピクセルの平均を計算する。現在ブロックE及びそれぞれのパーティションA,B,C,A1,A2,B1,B2,Cに係る平均は、パーティション選択部502に伝えられる。
パーティション選択部502は、現在ブロックのピクセルの平均を第1平均、隣接パーティションのピクセルの平均を第2平均とすれば、第1平均と第2平均との差の絶対値が所定の基準値以下である場合、該当する隣接パーティションを、現在ブロックのプレディクタとして選択する。選択された隣接パーティションについての情報は、動きベクトル推定部503に伝えられる。
その後、動きベクトル推定部503は、選択されたパーティションに係る動きベクトルともって、現在ブロックの動きベクトルを推定する。具体的な方法は、図3A及び図4Aで前述した通りである。望ましくは、選択されたパーティションは2以上であり、選択されたパーティションが複数個である場合は、図3A及び図4Bと関連して、前述した通りである。
図5Bは、本発明の他の実施形態による動きベクトル推定装置500の構成図であり、検索部511、類似度計算部512及び動きベクトル推定部513を含んでなる。図5Bを参照するに、検索部511は、現在ブロック410に隣接した複数個のパーティションA,B,C,A1,A2,B1,B2,Cの動きベクトルを利用し、少なくとも1つの参照フレームを検索し、現在ブロックに対応するブロック420ないし422を検索する。図3Bと関連して前述したところと同様に、現在ブロック410は、図3Aの現在ブロックEと同じブロックであると仮定する。
類似度計算部512は、検索部511で検索された現在ブロックに対応するブロック420ないし422それぞれに隣接したピクセル423ないし425と、現在ブロック410に隣接したピクセル411との類似度を計算する。
対応するブロック420ないし422それぞれに隣接したピクセル423ないし425と、現在ブロック410に隣接したピクセル411とのSADを計算することによって、類似度を計算する。
動きベクトル推定部513は、類似度計算部512の計算結果に基づいて、現在ブロックの動きベクトルを推定する。具体的な方法は、図3B及び図4B及び4Cで、前述した通りである。
図6は、本発明の一実施形態による動きベクトル推定装置500を含んだエンコーダ600の構成図である。図6を参照するに、加算部601は、外部から入力された現在フレームの映像データと、動き補償部609から受信された動き補償された映像データとの差を計算し、周波数変換部602に伝達する。現在マクロブロックが、インターモード・コーディングによって符号化されるマクロブロックである場合、加算部601は、外部から入力された映像データと、動き補償された映像データとの差を周波数変換部602に出力する。
周波数変換部602は、加算部601から受信された映像データに離散余弦変換(DCT)を適用し、空間領域の値を周波数領域の値に変換し、この変換された周波数領域の値を量子化部603に出力する。
量子化部603は、周波数変換部602から受信された周波数領域の値を量子化し、この量子化された周波数領域の値をエントロピ符号化部604に出力する。
エントロピ符号化部604は、量子化部603から受信された量子化された周波数領域の値、動き情報、及び動きベクトル推定装置500から受信されたパーティション情報をエントロピ符号化し、圧縮されたビットストリームを生成する。
逆量子化部605、逆周波数変換部606、フレーム保存部607、動き推定部608、動き補償部609、動きベクトル推定装置500は、動き補償を遂行するための集合である。
逆量子化部605は、量子化部603から受信された周波数領域の値に対して逆量子化を遂行し、逆量子化された周波数領域の値を逆周波数変換部606に出力する。
逆周波数変換部606は、逆量子化部605から受信された逆量子化された周波数領域の値を空間領域の値に変換し、加算部606aに伝達する。
加算部606aは、動き補償部609から受信された映像データに、逆周波数変換部606からの映像データを加算し、動き補償のために参照される参照フレームの映像データを生成する。生成された参照フレームの映像データは、フレーム保存部607に保存される。
フレーム保存部607は、加算部606aから受信された参照フレームの映像データを保存する。
動き推定部608は、外部から入力された現在フレームの映像データ、及びフレーム保存部607に保存された映像データでの動き予測を遂行することによって、動きベクトルを計算する。動き推定部608で計算された動きベクトルは、動き補償部609及び動きベクトル推定装置500に伝送される。
動き補償部609は、動き推定部608で計算された動きベクトルを使用し、フレーム保存部607に保存された参照フレームに対して動き補償を遂行し、動き補償された映像データを生成する。動き補償された映像データは、加算部601及び加算部606aに伝えられる。
動きベクトル推定装置500は、図5Aに図示されているように、空間類似度計算部501、パーティション選択部502、動きベクトル推定部503を含んでなる。空間類似度計算部501は、現在ブロックEに含まれたピクセルの平均と、現在ブロックに隣接したパーティションそれぞれに係るピクセルの平均とを計算する。
パーティション選択部502は、現在ブロックのピクセルの平均を第1平均、隣接パーティションのピクセルの平均を第2平均とすれば、第1平均と第2平均との差の絶対値が所定の基準値以下である場合、該当する隣接パーティションを、現在ブロックのプレディクタとして選択する。選択された隣接パーティションについての情報は、動きベクトル推定部503に伝えられる。
動きベクトル推定部503は、選択されたパーティションに係る動きベクトルをもって、現在ブロックの動きベクトルを推定する。一方、パーティション情報及び動き情報は、エントロピ符号化部604に出力される。動き情報は、現在ブロックの推定された動きベクトルと、隣接パーティションの動きベクトルとの差である。
具体的な方法は、図3A及び図4Aと関連して、前述した通りである。
本発明の他の実施形態によれば、動きベクトル推定装置500は、図5Bに図示されているように、検索部511、類似度計算部512、動きベクトル推定部513を含んでなる。検索部511は、現在ブロック410に隣接した複数個のパーティションA,B,C,A1,A2,B1,B2,Cの動きベクトルを利用し、参照フレームを検索し、現在ブロックに対応するブロック420ないし422を検索する。
類似度計算部512は、検索部511で検索された現在ブロックに対応するブロック420ないし422それぞれに隣接したピクセル423ないし425と、現在ブロック410に隣接したピクセル411との類似度を計算する。対応するブロック420ないし422それぞれに隣接したピクセル423ないし425と、現在ブロック410に隣接したピクセル411とのSADを計算することによって、類似度を計算する。
動きベクトル推定部513は、類似度計算部512の計算結果に基づいて、現在ブロックの動きベクトルを推定する。一方、パーティション情報及び動き情報は、エントロピ符号化部604に出力される。動き情報は、現在ブロックの推定された動きベクトルと、隣接パーティションの動きベクトルとの差である。
具体的な方法は、図3B、図4B及び4Cで、前述した通りである。
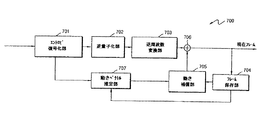
図7は、本発明の一実施形態によるデコーダ700の構成図であり、エントロピ復号化部701、逆量子化部702、逆周波数変換部703、フレーム保存部704、動き補償部705、加算部706、動きベクトル推定部707を含んでなる。図7を参照するに、エントロピ復号化部701は、エンコーダから入力された圧縮されたビットストリームをエントロピ復号化し、エントロピ復号化されたビットストリームを逆量子化部702及び動きベクトル推定部707に伝達する。特に、インターモード・コーディングの場合、エントロピ復号化部701は、現在マクロブロックと関連した動き情報、パーティション情報及びエントロピ復号化された映像データを抽出し、抽出された映像データは逆量子化部702に、抽出された動き情報及びパーティション情報は、動きベクトル推定部707に出力する。
逆量子化部702は、エントロピ復号化部701からエントロピ復号化された映像データを逆量子化し、逆量子化された映像データを逆周波数変換部703に出力する。
逆周波数変換部703は、逆量子化部で受信された逆量子化された映像データを空間領域の値に変換し、この変換された空間領域の値を加算部706に出力する。
加算部706は、逆周波数変換部703から受信された逆量子化された映像データに、動き補償部705から受信された動き補償された映像データを加算し、復号化されたデータを生成する。加算部706の出力は、所望の現在フレームの復号化された映像データである。
フレーム保存部704は、加算部706から出力されたフレームの映像データを保存する。
動きベクトル推定部707は、エントロピ復号化部701によって抽出された動き情報と、フレーム保存部704の参照ブロックとで動きベクトル予測を遂行し、現在ブロックの動きベクトルを再生する。再生された動きベクトルは、動き補償部705に出力される。
具体的に、動きベクトル推定部707は、図6で記述されたエンコーダ600の動きベクトル推定装置500と同一に、現在ブロックの動きベクトルを推定する。従って、動きベクトル推定部707は、図6の動きベクトル推定装置500と同一に構成されうる。
動き補償部705は、フレーム保存部704に保存された参照フレームの映像データに、動きベクトル推定部707から受信された動きベクトル及びパーティション情報を適用し、動き補償を遂行する。動き補償された映像データは、加算部706に出力される。
図8は、本発明の一実施形態によるデコーディング方法のフローチャートである。図8を参照するに、段階801で、符号化されたビットストリームから、動き情報、パーティション情報及び残差(residual)ブロックをエントロピ復号化する。
段階802では、復号化された動き情報及びパーティション情報から、現在ブロックの動きベクトルが復元される。さらに具体的に説明すれば、復号化されたパーティション情報に基づいて、現在ブロックと、現在ブロックに隣接した複数個のパーティションとの空間類似度を計算する。その後、計算された空間類似度に基づいて、現在ブロックに隣接した複数個のパーティションのうち、少なくとも一つを選択し、選択されたパーティションの動きベクトルを、現在ブロックの動きベクトルとして推定する。次に、推定された動きベクトルに動き情報を加算し、現在ブロックの動きベクトルを再生する。
本発明の他の実施形態によれば、復号化されたパーティション情報によって決定された現在ブロックに隣接した複数個のパーティションの動きベクトルを利用して参照フレームを検索し、現在ブロックに対応するブロックを検索し、検索された対応するブロックそれぞれに隣接したピクセルと、現在ブロックに隣接したピクセルとの類似度を計算する。その後、計算結果に基づいて、パーティションの動きベクトルのうち一つを、現在ブロックの動きベクトルとして推定し、推定された動きベクトルに復号化された動き情報を加算し、現在ブロックの動きベクトルを再生する。
段階803では、再生された動きベクトルを利用し、現在ブロックを復元する。すなわち、段階802で再生された動きベクトルを参照ブロックに適用し、動き補償されたブロックを生成する。これと別個に、残差ブロックは、段階801でエントロピ復号化され、逆量子化及び逆周波数変換を経て空間領域の残差ブロックが生成される。その後、生成された動き補償されたブロックと空間領域の残差ブロックとは加算され、現在ブロックを生成する。
デコーディング方法及びデコーダの場合、現在ブロックの動きベクトルを推定するために、エンコーダの場合と同一に、隣接パーティションを利用できるという点は明白であるので、これに係る反復的な説明を避ける。
本発明はまた、コンピュータで読み取り可能な記録媒体に、コンピュータで読み取り可能なコードとして具現することが可能である。コンピュータで読み取り可能な記録媒体は、コンピュータシステムによって読み取り可能なデータが保存されるあらゆる種類の記録装置を含む。コンピュータで読み取り可能な記録媒体の例としては、ROM(read-only memory)、RAM(random-access memory)、CD−ROM、磁気テープ、フロッピー(登録商標)ディスク、光データ保存装置などがある。また、コンピュータで読み取り可能な記録媒体は、ネットワークに連結されたコンピュータシステムに分散され、分散方式でコンピュータで読み取り可能なコードが保存されて実行されうる。
以上、本発明の望ましい実施形態について詳細に記述したが、本発明が属する技術分野において当業者ならば、特許請求の範囲に定義された本発明の精神及び範囲を外れずに、本発明をさまざまに変形または変更して実施できるということを理解できるであろう。よって、本発明の今後の実施形態の変更は、本発明の技術を乗り越えるものではないのであろう。
Claims (8)
- 現在ブロックの動きベクトルを推定する方法において、
前記現在ブロックと、前記現在ブロックに隣接した複数個のパーティションとの空間類似度に基づき、前記現在ブロックに隣接した複数個のパーティションのうち、動きベクトル差を獲得するために前記現在ブロックと比較される少なくとも一つのパーティションを選択する段階と、
前記選択されたパーティションを前記現在ブロックの動きベクトルとして推定し、前記動きベクトル差を生成する段階と、
前記動きベクトル差に対する情報及び前記現在ブロックの動きベクトルを復元するためにパーティション情報を伝送する段階とを含むことを特徴とする動きベクトル推定方法。 - 前記空間類似度は、前記現在ブロックのピクセルの平均値及び前記現在ブロックに隣接した複数個のパーティションそれぞれのピクセルの平均値に基づき獲得されることを特徴とする請求項1に記載の動きベクトル推定方法。
- 前記現在ブロックのピクセルの平均値は、前記現在ブロックに隣接したパーティションのピクセルのうち前記現在ブロックに接したピクセルを用いて獲得されることを特徴とする請求項2に記載の動きベクトル推定方法。
- 前記空間類似度は、エンコーダ及びデコーダとの間に予め取り決められた空間的順序によって前記現在ブロックに隣接したパーティションに対して割り当てられることを特徴とする請求項1に記載の動きベクトル推定方法。
- 前記推定方法において、複数個の隣接するパーティションが選択された場合、前記選択された隣接するパーティションのうち一つの動きベクトルが前記現在ブロックの動きベクトルとして推定されることを特徴とする請求項1に記載の動きベクトル推定方法。
- 前記推定方法において、複数個の隣接するパーティションが選択された場合、前記選択された隣接するパーティションの動きベクトルの中間値が前記現在ブロックの動きベクトルとして推定されることを特徴とする請求項1に記載の動きベクトル推定方法。
- 前記推定段階において、複数個の隣接するパーティションが選択された場合、前記選択された隣接するパーティションに加重値が与えられた動きベクトルの和が前記現在ブロックの動きベクトルとして推定されることを特徴とする請求項1に記載の動きベクトル推定方法。
- 前記推定段階において、前記現在ブロックに空間的に対応する位置に存する参照フレーム内のパーティションの動きベクトルが前記現在ブロックの動きベクトルとして推定されることを特徴とする請求項1に記載の動きベクトル推定方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2007-0000710 | 2007-01-03 | ||
| KR20070000710 | 2007-01-03 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009544785A Division JP5373626B2 (ja) | 2007-01-03 | 2007-12-27 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014014166A true JP2014014166A (ja) | 2014-01-23 |
Family
ID=39583959
Family Applications (7)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009544785A Expired - Fee Related JP5373626B2 (ja) | 2007-01-03 | 2007-12-27 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2013193761A Pending JP2014014169A (ja) | 2007-01-03 | 2013-09-19 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2013193762A Pending JP2014014170A (ja) | 2007-01-03 | 2013-09-19 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2013193760A Pending JP2014014168A (ja) | 2007-01-03 | 2013-09-19 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2013193759A Pending JP2014014167A (ja) | 2007-01-03 | 2013-09-19 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2013193758A Pending JP2014014166A (ja) | 2007-01-03 | 2013-09-19 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2015029773A Pending JP2015119502A (ja) | 2007-01-03 | 2015-02-18 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
Family Applications Before (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009544785A Expired - Fee Related JP5373626B2 (ja) | 2007-01-03 | 2007-12-27 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2013193761A Pending JP2014014169A (ja) | 2007-01-03 | 2013-09-19 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2013193762A Pending JP2014014170A (ja) | 2007-01-03 | 2013-09-19 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2013193760A Pending JP2014014168A (ja) | 2007-01-03 | 2013-09-19 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
| JP2013193759A Pending JP2014014167A (ja) | 2007-01-03 | 2013-09-19 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015029773A Pending JP2015119502A (ja) | 2007-01-03 | 2015-02-18 | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (8) | US8385420B2 (ja) |
| EP (6) | EP2595392A1 (ja) |
| JP (7) | JP5373626B2 (ja) |
| KR (7) | KR101383540B1 (ja) |
| CN (6) | CN102752593B (ja) |
| WO (1) | WO2008082158A1 (ja) |
Families Citing this family (66)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101383540B1 (ko) * | 2007-01-03 | 2014-04-09 | 삼성전자주식회사 | 복수의 움직임 벡터 프리딕터들을 사용하여 움직임 벡터를추정하는 방법, 장치, 인코더, 디코더 및 복호화 방법 |
| JP4786612B2 (ja) * | 2007-08-14 | 2011-10-05 | Kddi株式会社 | 動画像符号化装置の予測動きベクトル生成装置 |
| ES2812473T3 (es) | 2008-03-19 | 2021-03-17 | Nokia Technologies Oy | Vector de movimiento combinado y predicción de índice de referencia para la codificación de vídeo |
| RU2011110246A (ru) * | 2008-09-24 | 2012-09-27 | Сони Корпорейшн (JP) | Устройство и способ обработки изображений |
| KR101377660B1 (ko) * | 2008-09-30 | 2014-03-26 | 에스케이텔레콤 주식회사 | 복수 개의 움직임 벡터 추정을 이용한 움직임 벡터 부호화/복호화 방법 및 장치와 그를 이용한 영상 부호화/복호화 방법 및 장치 |
| CN102210152A (zh) | 2008-10-06 | 2011-10-05 | Lg电子株式会社 | 用于处理视频信号的方法和设备 |
| KR101279573B1 (ko) | 2008-10-31 | 2013-06-27 | 에스케이텔레콤 주식회사 | 움직임 벡터 부호화 방법 및 장치와 그를 이용한 영상 부호화/복호화 방법 및 장치 |
| FR2941581A1 (fr) * | 2009-01-28 | 2010-07-30 | France Telecom | Codage et decodage d'une sequence d'images video par zones d'images |
| BRPI1011698B1 (pt) | 2009-03-23 | 2019-04-02 | Ntt Docomo, Inc. | Método de decodificação preditiva de imagem, dispositivo de decodificação preditiva de imagem, método de codificação preditiva de imagem, e dispositivo de codificação preditiva de imagem |
| ES2629027T3 (es) * | 2009-06-19 | 2017-08-07 | Orange | Codificación de vectores de movimiento por competición de predictores |
| EP2446630B1 (fr) * | 2009-06-23 | 2020-02-26 | Orange | Codage et décodage d'une séquence d'images vidéo par zones d'image |
| CN101931803B (zh) * | 2009-06-26 | 2013-01-09 | 华为技术有限公司 | 视频图像运动信息获取方法、装置及设备、模板构造方法 |
| EP3852371B1 (fr) * | 2009-07-03 | 2024-03-20 | Orange | Prediction d'un vecteur mouvement d'une partition d'image courante pointant sur une zone de référence qui recouvre plusieurs partitions d'image de référence, codage et decodage utilisant une telle prediction |
| EP3651466A1 (fr) * | 2009-07-03 | 2020-05-13 | Orange | Prédiction d'un vecteur mouvement d'une partition d'image courante de forme géometrique ou de taille différente de celle d'au moins une partition d'image de référence voisine, codage et decodage utilisant une telle prediction |
| US20110001882A1 (en) * | 2009-07-06 | 2011-01-06 | Sony Corporation | Method and system for determining motion vectors for flat regions |
| JP5216710B2 (ja) * | 2009-07-24 | 2013-06-19 | 日立コンシューマエレクトロニクス株式会社 | 復号化処理方法 |
| KR101452859B1 (ko) * | 2009-08-13 | 2014-10-23 | 삼성전자주식회사 | 움직임 벡터를 부호화 및 복호화하는 방법 및 장치 |
| AU2013201857B2 (en) * | 2009-08-13 | 2013-12-05 | Samsung Electronics Co., Ltd | Method and apparatus for encoding/decoding motion vector |
| KR101356613B1 (ko) * | 2009-08-21 | 2014-02-06 | 에스케이텔레콤 주식회사 | 적응적 움직임 벡터 해상도를 이용한 영상 부호화/복호화 방법 및 장치 |
| WO2011021914A2 (ko) | 2009-08-21 | 2011-02-24 | 에스케이텔레콤 주식회사 | 적응적 움직임 벡터 해상도를 이용한 영상 부호화/복호화 방법 및 장치 |
| JP2011091696A (ja) * | 2009-10-23 | 2011-05-06 | Victor Co Of Japan Ltd | 動きベクトル予測方法 |
| WO2011064673A1 (en) * | 2009-11-30 | 2011-06-03 | France Telecom | Method of and apparatus for encoding video frames, method of and apparatus for decoding video frames |
| US9781446B2 (en) | 2009-12-10 | 2017-10-03 | Thomson Licensing Dtv | Method for coding and method for decoding a block of an image and corresponding coding and decoding devices |
| KR101522850B1 (ko) | 2010-01-14 | 2015-05-26 | 삼성전자주식회사 | 움직임 벡터를 부호화, 복호화하는 방법 및 장치 |
| EP2528332A4 (en) | 2010-01-19 | 2015-08-05 | Samsung Electronics Co Ltd | METHOD AND DEVICE FOR CODING / DECODING PICTURES USING A MOTION VECTOR OF A PREVIOUS BLOCK AS A MOTION VECTOR OF THE PRESENT BLOCK |
| KR101789845B1 (ko) | 2010-01-22 | 2017-11-20 | 톰슨 라이센싱 | 샘플링 기반 초 해상도 비디오 인코딩 및 디코딩을 위한 방법 및 장치 |
| JP5805665B2 (ja) | 2010-01-22 | 2015-11-04 | トムソン ライセンシングThomson Licensing | Example−based超解像を用いたビデオ圧縮のためのデータプルーニング |
| WO2011095259A1 (en) * | 2010-02-05 | 2011-08-11 | Telefonaktiebolaget L M Ericsson (Publ) | Selecting predicted motion vector candidates |
| JP5299319B2 (ja) * | 2010-03-04 | 2013-09-25 | 富士通株式会社 | 動きベクトル検出装置 |
| WO2011115659A1 (en) * | 2010-03-16 | 2011-09-22 | Thomson Licensing | Methods and apparatus for implicit adaptive motion vector predictor selection for video encoding and decoding |
| JP2011223176A (ja) * | 2010-04-06 | 2011-11-04 | Sony Corp | 画像処理装置および方法 |
| JP5368631B2 (ja) | 2010-04-08 | 2013-12-18 | 株式会社東芝 | 画像符号化方法、装置、及びプログラム |
| CN102223525B (zh) * | 2010-04-13 | 2014-02-19 | 富士通株式会社 | 视频解码方法和系统 |
| EP3285490B1 (en) * | 2010-04-22 | 2021-03-10 | HFI Innovation Inc. | Motion prediction method |
| KR101456499B1 (ko) * | 2010-07-09 | 2014-11-03 | 삼성전자주식회사 | 움직임 벡터의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| SG187094A1 (en) | 2010-07-20 | 2013-03-28 | Ntt Docomo Inc | Image prediction encoding device, image prediction encoding method, image prediction encoding program, image prediction decoding device, image prediction decoding method, and image prediction decoding program |
| US9544598B2 (en) | 2010-09-10 | 2017-01-10 | Thomson Licensing | Methods and apparatus for pruning decision optimization in example-based data pruning compression |
| WO2012033969A1 (en) * | 2010-09-10 | 2012-03-15 | Thomson Licensing | Decoding of the link to a reference block in video compression by image content based search and ranking |
| US20130170564A1 (en) | 2010-09-10 | 2013-07-04 | Thomson Licensing | Encoding of a picture in a video sequence by example-based data pruning using intra-frame patch similarity |
| US9202289B2 (en) * | 2010-09-30 | 2015-12-01 | Electronics And Telecommunications Research Institute | Method for coding and decoding target block partition information using information about neighboring blocks |
| EP4120686B1 (en) * | 2011-01-07 | 2023-08-23 | Ntt Docomo, Inc. | Predictive encoding method, predictive encoding device, and predictive encoding program of motion vector, and, predictive decoding method, predictive decoding device, and predictive decoding program of motion vector |
| GB2487200A (en) * | 2011-01-12 | 2012-07-18 | Canon Kk | Video encoding and decoding with improved error resilience |
| JP5498972B2 (ja) * | 2011-01-21 | 2014-05-21 | 日本放送協会 | 符号化装置、復号装置及びプログラム |
| MX2013008691A (es) * | 2011-02-10 | 2013-08-21 | Panasonic Corp | Metodo de codificacion de imagenes en movimiento, aparato de codificacion de imagenes en movimiento, metodo de decodificacion de imagenes en movimiento, aparato de decodificacion de imagenes en movimiento y aparato de codificacion y decodificacion de imagenes en movimiento. |
| US10171813B2 (en) | 2011-02-24 | 2019-01-01 | Qualcomm Incorporated | Hierarchy of motion prediction video blocks |
| US9571833B2 (en) | 2011-11-04 | 2017-02-14 | Nokia Technologies Oy | Method for coding and an apparatus |
| US10412414B2 (en) | 2012-08-13 | 2019-09-10 | Gurulogic Microsystems Oy | Decoder and method for decoding encoded input data containing a plurality of blocks or packets |
| GB2505169B (en) * | 2012-08-13 | 2016-03-16 | Gurulogic Microsystems Oy | decoder and method |
| KR101477545B1 (ko) | 2013-04-30 | 2015-01-07 | 삼성전자주식회사 | 움직임 벡터를 복호화하는 방법 |
| KR101454664B1 (ko) | 2013-04-30 | 2014-10-28 | 삼성전자주식회사 | 움직임 벡터를 복호화하는 방법 |
| KR101477546B1 (ko) * | 2013-04-30 | 2014-12-31 | 삼성전자주식회사 | 움직임 벡터를 복호화하는 장치 |
| JP6259272B2 (ja) * | 2013-12-06 | 2018-01-10 | 日本電信電話株式会社 | 映像符号化装置及び映像符号化プログラム |
| JP6468703B2 (ja) * | 2013-12-20 | 2019-02-13 | キヤノン株式会社 | 動き検出装置、動き検出方法及びプログラム |
| US10757437B2 (en) * | 2014-07-17 | 2020-08-25 | Apple Inc. | Motion estimation in block processing pipelines |
| FR3029055B1 (fr) * | 2014-11-24 | 2017-01-13 | Ateme | Procede d'encodage d'image et equipement pour la mise en oeuvre du procede |
| CN107809642B (zh) * | 2015-02-16 | 2020-06-16 | 华为技术有限公司 | 用于视频图像编码和解码的方法、编码设备和解码设备 |
| CN107615764A (zh) * | 2015-06-03 | 2018-01-19 | 奥林巴斯株式会社 | 运算装置、运算方法和程序 |
| TW201707959A (zh) | 2015-08-21 | 2017-03-01 | Jsr Corp | 基材的處理方法、暫時固定用組成物及半導體裝置 |
| JP6524972B2 (ja) | 2015-09-28 | 2019-06-05 | Jsr株式会社 | 対象物の処理方法、仮固定用組成物、半導体装置及びその製造方法 |
| US9794588B2 (en) | 2015-09-30 | 2017-10-17 | Sony Corporation | Image processing system with optical flow recovery mechanism and method of operation thereof |
| JP6602141B2 (ja) * | 2015-10-05 | 2019-11-06 | キヤノン株式会社 | 画像処理装置および方法 |
| US10630992B2 (en) | 2016-01-08 | 2020-04-21 | Samsung Electronics Co., Ltd. | Method, application processor, and mobile terminal for processing reference image |
| CN107133549B (zh) | 2016-02-29 | 2020-11-24 | 上海联影医疗科技有限公司 | Ect运动门控信号获取方法及ect图像重建方法 |
| CN106251381B (zh) * | 2016-07-29 | 2020-02-04 | 上海联影医疗科技有限公司 | 图像重建方法 |
| US10355791B1 (en) | 2018-04-10 | 2019-07-16 | Nxp B.V. | Wireless device |
| CN110213593B (zh) * | 2018-05-25 | 2023-01-24 | 腾讯科技(深圳)有限公司 | 一种运动矢量的确定方法、编码压缩方法和相关装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4002A (en) * | 1845-04-16 | Method of checking- the motion of dkop cut-off valves of steam-engines | ||
| JPH11112994A (ja) * | 1997-09-12 | 1999-04-23 | Lg Semicon Co Ltd | Mpeg−4の動きベクトル符号化方法 |
| US6381277B1 (en) * | 1997-12-12 | 2002-04-30 | Hyundai Electronics Ind. Co, Ltd. | Shaped information coding device for interlaced scanning video and method therefor |
| JP2006020217A (ja) * | 2004-07-05 | 2006-01-19 | Sharp Corp | 画像符号化装置 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5594504A (en) | 1994-07-06 | 1997-01-14 | Lucent Technologies Inc. | Predictive video coding using a motion vector updating routine |
| JP3812750B2 (ja) * | 1995-01-19 | 2006-08-23 | ソニー株式会社 | 動き量検出方法及び動き量検出装置 |
| KR100243865B1 (ko) * | 1997-09-30 | 2000-02-01 | 전주범 | 움직임 벡터 부호화 방법 및 그 장치 |
| CN1668111A (zh) * | 1997-12-01 | 2005-09-14 | 三星电子株式会社 | 运动向量预测方法 |
| US6249548B1 (en) | 1998-07-10 | 2001-06-19 | U.S. Phillips Corporation | Motion vector processing |
| JP4932987B2 (ja) | 1998-07-10 | 2012-05-16 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 動きベクトル処理方法 |
| JP2000253407A (ja) * | 1999-02-26 | 2000-09-14 | Matsushita Electric Ind Co Ltd | 動きベクトル検出方法および画像符号化方法 |
| JP2000295625A (ja) | 1999-04-08 | 2000-10-20 | Nippon Telegr & Teleph Corp <Ntt> | 動きベクトル探索方法および動きベクトル探索プログラムを記録した記録媒体 |
| KR100364789B1 (ko) * | 2000-02-28 | 2002-12-16 | 엘지전자 주식회사 | 움직임 추정 방법 및 장치 |
| US6825885B2 (en) | 2001-02-13 | 2004-11-30 | Koninklijke Philips Electronics N.V. | Motion information coding and decoding method |
| US6980596B2 (en) * | 2001-11-27 | 2005-12-27 | General Instrument Corporation | Macroblock level adaptive frame/field coding for digital video content |
| CN101448162B (zh) * | 2001-12-17 | 2013-01-02 | 微软公司 | 处理视频图像的方法 |
| JP4114859B2 (ja) | 2002-01-09 | 2008-07-09 | 松下電器産業株式会社 | 動きベクトル符号化方法および動きベクトル復号化方法 |
| JP4150742B2 (ja) * | 2002-01-09 | 2008-09-17 | 松下電器産業株式会社 | 動きベクトル復号化方法 |
| US7003035B2 (en) * | 2002-01-25 | 2006-02-21 | Microsoft Corporation | Video coding methods and apparatuses |
| KR100774296B1 (ko) * | 2002-07-16 | 2007-11-08 | 삼성전자주식회사 | 움직임 벡터 부호화 방법, 복호화 방법 및 그 장치 |
| US6925123B2 (en) | 2002-08-06 | 2005-08-02 | Motorola, Inc. | Method and apparatus for performing high quality fast predictive motion search |
| EP1395061A1 (en) | 2002-08-27 | 2004-03-03 | Mitsubishi Electric Information Technology Centre Europe B.V. | Method and apparatus for compensation of erroneous motion vectors in video data |
| US20040141555A1 (en) * | 2003-01-16 | 2004-07-22 | Rault Patrick M. | Method of motion vector prediction and system thereof |
| US7606305B1 (en) * | 2003-02-24 | 2009-10-20 | Vixs Systems, Inc. | Method and system for transcoding video data |
| JP4373702B2 (ja) | 2003-05-07 | 2009-11-25 | 株式会社エヌ・ティ・ティ・ドコモ | 動画像符号化装置、動画像復号化装置、動画像符号化方法、動画像復号化方法、動画像符号化プログラム及び動画像復号化プログラム |
| KR100579542B1 (ko) | 2003-07-29 | 2006-05-15 | 삼성전자주식회사 | 블럭 간의 상관성을 고려한 움직임 추정 장치 및 방법 |
| JP2006025033A (ja) | 2004-07-06 | 2006-01-26 | Sony Corp | 画像処理装置および画像処理方法 |
| AR049593A1 (es) | 2004-07-20 | 2006-08-16 | Qualcomm Inc | Metodo y aparato para predecir el vector de movimiento en compresion de video temporal. |
| JP2006074474A (ja) | 2004-09-02 | 2006-03-16 | Toshiba Corp | 動画像符号化装置、動画像符号化方法および動画像符号化プログラム |
| JP2006074520A (ja) | 2004-09-02 | 2006-03-16 | Matsushita Electric Ind Co Ltd | 動きベクトル検出装置 |
| KR100751407B1 (ko) * | 2005-03-09 | 2007-08-23 | 엘지전자 주식회사 | 영상 부호화 장치 및 움직임 추정 방법 |
| CN100473168C (zh) * | 2005-06-21 | 2009-03-25 | 中国科学院计算技术研究所 | 视频编码的运动矢量空间预测方法 |
| US7672377B2 (en) * | 2006-04-21 | 2010-03-02 | Dilithium Holdings, Inc. | Method and system for video encoding and transcoding |
| KR100943627B1 (ko) | 2006-07-20 | 2010-02-24 | 엘지전자 주식회사 | 모션 벡터 예측 방법 |
| KR101383540B1 (ko) * | 2007-01-03 | 2014-04-09 | 삼성전자주식회사 | 복수의 움직임 벡터 프리딕터들을 사용하여 움직임 벡터를추정하는 방법, 장치, 인코더, 디코더 및 복호화 방법 |
| CN101229999A (zh) | 2008-02-04 | 2008-07-30 | 陕西科技大学 | 一种利用固体超强酸作为催化剂制备油酸醇酯的方法 |
| CN101739297B (zh) | 2010-01-21 | 2012-10-03 | 上海交通大学 | 普适服务动态更新中服务对象状态转移系统及其方法 |
| CN101885948A (zh) | 2010-06-13 | 2010-11-17 | 陕县青山磨料制品有限公司 | 一种植物纤维抛光研磨粉及其生产方法 |
-
2007
- 2007-05-07 KR KR1020070044226A patent/KR101383540B1/ko active IP Right Grant
- 2007-12-27 CN CN201210210549.4A patent/CN102752593B/zh active Active
- 2007-12-27 WO PCT/KR2007/006894 patent/WO2008082158A1/en active Application Filing
- 2007-12-27 EP EP13155101.2A patent/EP2595392A1/en not_active Ceased
- 2007-12-27 EP EP07851807A patent/EP2103141A4/en not_active Ceased
- 2007-12-27 JP JP2009544785A patent/JP5373626B2/ja not_active Expired - Fee Related
- 2007-12-27 CN CN201310013145.0A patent/CN103079070B/zh active Active
- 2007-12-27 US US11/964,844 patent/US8385420B2/en active Active
- 2007-12-27 EP EP13155098.0A patent/EP2595389A1/en not_active Withdrawn
- 2007-12-27 CN CN201310013187.4A patent/CN103079071B/zh active Active
- 2007-12-27 EP EP13155099.8A patent/EP2595390A1/en not_active Ceased
- 2007-12-27 CN CN201310013142.7A patent/CN103079069B/zh active Active
- 2007-12-27 EP EP13155096.4A patent/EP2595388A1/en not_active Withdrawn
- 2007-12-27 CN CN201310013117.9A patent/CN103096080B/zh active Active
- 2007-12-27 EP EP13155100.4A patent/EP2595391A1/en not_active Ceased
- 2007-12-27 CN CN2007800492409A patent/CN101573984B/zh not_active Expired - Fee Related
-
2013
- 2013-01-30 US US13/754,337 patent/US8625674B2/en active Active
- 2013-01-31 US US13/755,191 patent/US9113112B2/en active Active
- 2013-01-31 US US13/755,530 patent/US8831105B2/en active Active
- 2013-01-31 US US13/755,041 patent/US9113111B2/en active Active
- 2013-01-31 US US13/754,989 patent/US9113110B2/en active Active
- 2013-09-09 KR KR1020130108052A patent/KR20130119396A/ko not_active Application Discontinuation
- 2013-09-09 KR KR1020130108053A patent/KR20130115186A/ko not_active Application Discontinuation
- 2013-09-09 KR KR1020130108051A patent/KR101421056B1/ko active IP Right Grant
- 2013-09-09 KR KR1020130108050A patent/KR20130119395A/ko not_active Application Discontinuation
- 2013-09-09 KR KR1020130108055A patent/KR20130114045A/ko active Search and Examination
- 2013-09-19 JP JP2013193761A patent/JP2014014169A/ja active Pending
- 2013-09-19 JP JP2013193762A patent/JP2014014170A/ja active Pending
- 2013-09-19 JP JP2013193760A patent/JP2014014168A/ja active Pending
- 2013-09-19 JP JP2013193759A patent/JP2014014167A/ja active Pending
- 2013-09-19 JP JP2013193758A patent/JP2014014166A/ja active Pending
-
2014
- 2014-07-22 KR KR1020140092662A patent/KR101512324B1/ko active IP Right Grant
-
2015
- 2015-02-18 JP JP2015029773A patent/JP2015119502A/ja active Pending
- 2015-07-14 US US14/799,426 patent/US9369731B2/en active Active
- 2015-07-14 US US14/799,396 patent/US9313518B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4002A (en) * | 1845-04-16 | Method of checking- the motion of dkop cut-off valves of steam-engines | ||
| JPH11112994A (ja) * | 1997-09-12 | 1999-04-23 | Lg Semicon Co Ltd | Mpeg−4の動きベクトル符号化方法 |
| US6381277B1 (en) * | 1997-12-12 | 2002-04-30 | Hyundai Electronics Ind. Co, Ltd. | Shaped information coding device for interlaced scanning video and method therefor |
| JP2006020217A (ja) * | 2004-07-05 | 2006-01-19 | Sharp Corp | 画像符号化装置 |
Non-Patent Citations (1)
| Title |
|---|
| JPN6014024035; Pooja Agarwal,Apoorv Gupta,Paul Kim: 'Performance Complexity Trade-Offs in H.264 Motion Search' Stanford University,Center Activities,Class Project,EE398,Image and Video Compression 2005,EE398,Image and Video Compression, 20050310, P.3, Stanford Center for Image Syste&# * |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5373626B2 (ja) | 複数の動きベクトル・プレディクタを使用して動きベクトルを推定する方法、装置、エンコーダ、デコーダ及びデコーディング方法 | |
| JP5620109B2 (ja) | 動きベクトル推定方法、動きベクトル推定装置、ビデオエンコーダ、ビデオデコーダ及びデコーディング方法 | |
| JP5580453B2 (ja) | 直接モード符号化及び復号化装置 | |
| KR20080064011A (ko) | 인접 파티션의 크기를 고려한 움직임 벡터 예측 방법,장치, 인코더, 디코더 및 복호화 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140610 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140905 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141021 |