JP2013187931A - Motor control device - Google Patents
Motor control device Download PDFInfo
- Publication number
- JP2013187931A JP2013187931A JP2012048823A JP2012048823A JP2013187931A JP 2013187931 A JP2013187931 A JP 2013187931A JP 2012048823 A JP2012048823 A JP 2012048823A JP 2012048823 A JP2012048823 A JP 2012048823A JP 2013187931 A JP2013187931 A JP 2013187931A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- command
- voltage
- current
- axis current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Abstract
Description
本発明は、三相同期モータの電機子巻線に通電する電流をフィードバック制御する制御装置に関し、より詳細には、弱め磁束制御を行うときの過渡応答特性を向上したモータ制御装置に関する。 The present invention relates to a control device that performs feedback control of a current supplied to an armature winding of a three-phase synchronous motor, and more particularly to a motor control device that improves transient response characteristics when performing flux-weakening control.
近年、三相同期モータの制御装置にインバータを適用する技術が普及し、旧態と比較して格段に制御性能が向上している。インバータを適用した制御装置では、外部からの指令トルクまたは指令電流に基づくとともに、電機子巻線に流れる各相の電流を検出してフィードバックすることで、印加する矩形波電圧の位相を制御したり、パルス幅変調(PWM)方式により電圧実効値を制御したりして電流を制御する場合が多い。この種の制御では、回転子の回転位相を検出して角速度を演算し、回転子の磁石の回転位置を基準とするdq座標軸上で演算を行うことが一般的であり、特許文献1および特許文献2に技術例が開示されている。 In recent years, a technique for applying an inverter to a control device for a three-phase synchronous motor has become widespread, and control performance has been greatly improved as compared with the old state. In the control device to which the inverter is applied, the phase of the applied rectangular wave voltage is controlled by detecting and feeding back the current of each phase flowing through the armature winding, based on the command torque or command current from the outside. In many cases, the current is controlled by controlling the effective voltage value by a pulse width modulation (PWM) method. In this type of control, the rotational phase of the rotor is detected, the angular velocity is calculated, and the calculation is generally performed on the dq coordinate axis with reference to the rotational position of the rotor magnet. A technical example is disclosed in Document 2.
特許文献1に開示された永久磁石同期電動機の制御装置は、第1のd軸およびq軸の電流指令値と電流検出値とにより演算した第2のd軸およびq軸の電流指令値、および周波数指令値に従い、永久磁石同期電動機を駆動する電力変換器の出力電圧値を制御する。そして、出力電圧指令値と出力電圧値との偏差の積分演算値を、第1のd軸電流指令値とする弱め界磁指令演算部を有することを特徴としている。これにより、弱め域界磁においても、高精度かつ高応答なモータトルクを実現することができる、と記載されている。つまり、電力変換器は駆動電源の最大出力電圧以上は出力できないので、出力電圧指令値が大きくなりすぎると、もはや指令値に追従できなくなる。このとき、弱め磁束制御により負のd軸電流を流すことで、大きなトルクを得ることができる。
The control device for a permanent magnet synchronous motor disclosed in
また、特許文献2に開示された同期電動機制御装置は、交流電圧を印加する電力変換部と、回転速度を検出する速度検出部と、3相電流を検出する電流検出部と、3相電流をd−q軸電流に変換する3相/2相座標変換部と、d軸およびq軸電流制御部と、3相電圧指令を演算する2相/3相座標変換部と、d軸電流指令演算部とを備えている。そして、d軸電流指令演算部が、d軸電流指令をモータ速度に応じて制限するd軸電流指令制限部を備えたことを特徴としている。d軸電流指令制限部は、d軸指令電圧および最大出力電圧から最大q軸電圧を算出し、この最大q軸電圧とq軸指令電圧とを比較して、後者が前者を越える場合は、両者の差分を用いてd軸指令電流を磁束の弱まる方向に大きくさせる。これにより、最適なd軸電流指令を作り、電圧指令Vd*、Vq*の飽和を防止できると期待されている。特許文献2の技術例においても、上述したように弱め磁束制御が用いられ、電圧方程式は定常状態で考えられている。 Moreover, the synchronous motor control device disclosed in Patent Document 2 includes a power converter that applies an AC voltage, a speed detector that detects a rotation speed, a current detector that detects a three-phase current, and a three-phase current. 3-phase / 2-phase coordinate conversion unit for converting to dq-axis current, d-axis and q-axis current control unit, 2-phase / 3-phase coordinate conversion unit for calculating 3-phase voltage command, and d-axis current command calculation Department. The d-axis current command calculation unit includes a d-axis current command limiting unit that limits the d-axis current command according to the motor speed. The d-axis current command limiter calculates the maximum q-axis voltage from the d-axis command voltage and the maximum output voltage, compares the maximum q-axis voltage with the q-axis command voltage, and if the latter exceeds the former, Is used to increase the d-axis command current in the direction in which the magnetic flux is weakened. As a result, it is expected that an optimum d-axis current command can be created and saturation of the voltage commands Vd * and Vq * can be prevented. Also in the technical example of Patent Document 2, the flux-weakening control is used as described above, and the voltage equation is considered in a steady state.
ところで、特許文献1の制御装置では、d軸指令電流を算出する際に前回のd軸指令電圧をフィードバックして用いている。したがって、出力電圧指令値と出力電圧値との偏差が発生した以降になってからでないと弱め磁束制御が開始されず、制御に遅延時間が存在する。このため、指令トルクまたは指令電流が増加したときの過渡的な電流変化に対して十分な制御とはいえない。また、演算式を見ても定常状態しか考慮されておらず、換言すれば電機子巻線のインダクタンス成分が考慮されておらず、過渡的な応答に対応していない。
By the way, in the control device of
また、特許文献2の制御装置でも、q軸電圧指令を算出した後にこれをフィードバックしてd軸電流指令を算出し、続いてd軸電圧指令を算出しており、演算に遅延が生じている。演算の遅延は、直接的に応答時間の遅れにつながるため、指令トルクまたは指令電流が変化したときの過渡応答の制御としては十分とはいえない。 Also in the control device of Patent Document 2, after calculating the q-axis voltage command, this is fed back to calculate the d-axis current command, and then the d-axis voltage command is calculated, resulting in a delay in the calculation. . Since the calculation delay directly leads to a delay in response time, it cannot be said to be sufficient for controlling the transient response when the command torque or the command current changes.
本発明は、上記背景技術の問題点に鑑みてなされたもので、指令トルクまたは指令電流が増加したときに迅速に弱め磁束制御を開始するようにして、安定的でかつ高速な過渡応答特性を実現したモータ制御装置を提供することを解決すべき課題とする。 The present invention has been made in view of the problems of the background art described above. When the command torque or the command current increases, the magnetic flux control is started promptly so that a stable and high-speed transient response characteristic can be obtained. Providing a realized motor control apparatus is a problem to be solved.
上記課題を解決する請求項1に係るモータ制御装置の発明は、回転子に磁石を有し固定子に電機子巻線を有する三相同期モータの前記電機子巻線に流れる三相電流を検出する電流検出手段と、前記回転子が回転する角速度を検出する角速度検出手段と、検出した三相電流を、前記回転子の磁石の回転位置を基準とするdq座標軸上のd軸電流およびq軸電流に変換する検出電流変換部と、外部からの指令トルクまたは指令電流を前記dq座標軸上の指令d軸電流および指令q軸電流に変換する電流指令演算部と、前記d軸電流、前記q軸電流、前記指令d軸電流、および前記指令q軸電流に基づいて、前記dq座標軸上の指令d軸電圧および指令q軸電圧で表される指令電圧を演算する電圧ベクトル演算部と、前記指令d軸電圧および前記指令q軸電圧を三相電圧に変換する指令電圧変換部と、前記三相電圧を生成して前記電機子巻線に印加する電力変換手段と、を備えるモータ制御装置であって、前記電圧ベクトル演算部は、前記指令q軸電流から前記q軸電流を減算したq軸電流偏差を補償するために必要とされる所要電圧を演算し、前記所要電圧が所定の制限電圧を超過したときに前記指令d軸電流を負側に増加させるように制御する弱め磁束制御部を含む。
The invention of the motor control device according to
請求項2に係る発明は、請求項1において、前記弱め磁束制御部は、前記q軸電流偏差にq軸インダクタンスを乗算し制御サイクルタイムで除算して前記所要電圧を演算する。 According to a second aspect of the present invention, in the first aspect, the flux-weakening control unit calculates the required voltage by multiplying the q-axis current deviation by a q-axis inductance and dividing by a control cycle time.
請求項3に係る発明は、請求項1または2において、前記弱め磁束制御部は、前記所要電圧が前記制限電圧を超過した超過分に対応して、前記指令d軸電流を負側に増加させる調整量を決定する。 According to a third aspect of the present invention, in the first or second aspect, the flux-weakening control unit increases the command d-axis current to the negative side in response to an excess of the required voltage exceeding the limit voltage. Determine the adjustment amount.
請求項4に係る発明は、請求項1において、前記電圧ベクトル演算部は、前記q軸指令電流から前記q軸電流を減算してq軸電流偏差を求め、前記q軸電流偏差に基づいた比例積分制御により前記指令q軸電圧を演算するq軸演算部と、前記q軸電流偏差にq軸インダクタンスを乗算し制御サイクルタイムで除算して前記所要電圧を演算し、前記所要電圧が前記制限電圧を超過した超過分に対応して、前記指令d軸電流を負側に増加させる調整量を決定する弱め磁束制御部と、前記d軸指令電流に前記調整量を考慮した後に前記d軸電流を減算してd軸電流偏差を求め、前記d軸電流偏差に基づいた比例積分制御により前記指令d軸電圧を演算するd軸演算部と、を有する。 According to a fourth aspect of the present invention, in the first aspect, the voltage vector calculation unit subtracts the q-axis current from the q-axis command current to obtain a q-axis current deviation, and is proportional to the q-axis current deviation. A q-axis calculating unit for calculating the command q-axis voltage by integral control; and calculating the required voltage by multiplying the q-axis current deviation by a q-axis inductance and dividing by a control cycle time. In response to the excess exceeding the value, the flux-weakening control unit that determines the adjustment amount for increasing the command d-axis current to the negative side, and the d-axis current after taking the adjustment amount into consideration for the d-axis command current A d-axis operation unit that obtains a d-axis current deviation by subtraction and calculates the command d-axis voltage by proportional-integral control based on the d-axis current deviation.
本発明は、過渡的な電流指令の増加に起因する印加電圧の飽和に対処するために、演算に起因する遅延時間を低減して電圧指令を求めることを主旨としている。さらに、過渡的な電流増加では、モータの電圧方程式に示されるように、電機子巻線のインダクタンス成分が過渡応答に大きな影響を及ぼしている。このため、本発明では、インダクタンス成分を考慮して電流増加に必要とされる印加電圧の増加分を予め補正したd軸電流を求め、瞬時に磁束を弱める弱め磁束制御を開始することで印加電圧の飽和を回避し、安定的でかつ高速な過渡応答特性を維持するようにしている。 The main object of the present invention is to obtain a voltage command by reducing a delay time caused by calculation in order to cope with saturation of an applied voltage caused by a transient increase in current command. Further, in the transient current increase, as shown in the motor voltage equation, the inductance component of the armature winding has a great influence on the transient response. Therefore, in the present invention, the d-axis current obtained by correcting the increase in the applied voltage required for increasing the current in consideration of the inductance component is obtained, and the applied voltage is started by starting the weakening magnetic flux control that weakens the magnetic flux instantaneously. Saturation is avoided, and stable and fast transient response characteristics are maintained.
請求項1に係るモータ制御装置の発明では、電圧ベクトル演算部の弱め磁束制御部は、指令q軸電流からq軸電流を減算したq軸電流偏差を補償するために必要とされる所要電圧を演算し、所要電圧が所定の制限電圧を超過したときに指令d軸電流を負側に増加させるように制御する。したがって、指令トルクまたは指令電流が増加して必要とされる所要電圧が制限電圧を超過した時点で迅速に弱め磁束制御を開始して、実際の印加電圧が制限電圧まで増加して瞬時的に飽和することを回避できる。これにより、指令に対応した電流値まで短時間で到達でき、安定的でかつ高速な過渡応答特性を実現できる。 In the motor control device according to the first aspect of the present invention, the flux-weakening control unit of the voltage vector calculation unit calculates the required voltage required to compensate for the q-axis current deviation obtained by subtracting the q-axis current from the command q-axis current. Control is performed to increase the command d-axis current to the negative side when the required voltage exceeds a predetermined limit voltage. Therefore, when the required voltage exceeds the limit voltage by increasing the command torque or command current, the magnetic flux control starts immediately and the actual applied voltage increases to the limit voltage and instantaneously saturates. Can be avoided. Thereby, the current value corresponding to the command can be reached in a short time, and a stable and fast transient response characteristic can be realized.
請求項2に係る発明では、弱め磁束制御部は、q軸電流偏差にq軸インダクタンスを乗算し制御サイクルタイムで除算して所要電圧を演算するので、電機子巻線のインダクタンス成分を考慮して高精度に所要電圧を演算できる。 In the invention according to claim 2, since the flux weakening control unit calculates the required voltage by multiplying the q-axis current deviation by the q-axis inductance and dividing by the control cycle time, the inductance component of the armature winding is considered. The required voltage can be calculated with high accuracy.
請求項3に係る発明では、弱め磁束制御部は、所要電圧が制限電圧を超過した超過分に対応して、指令d軸電流を負側に増加させる調整量を決定するので、実際の印加電圧が飽和することを確実に回避できる。
In the invention according to
請求項4に係る発明では、電圧ベクトル演算部は、q軸電流偏差に基づいた比例積分制御により指令q軸電圧を演算するq軸演算部と、所要電圧が制限電圧を超過した超過分に対応して指令d軸電流を負側に増加させる調整量を決定する弱め磁束制御部と、d軸指令電流に調整量を考慮した後にd軸電流を減算してd軸電流偏差を求め、比例積分制御により指令d軸電圧を演算するd軸演算部と、を有する。本発明は、上述するように比例積分制御で指令電圧を演算する方式と、弱め磁束制御部とを組み合わせることにより、安定的でかつ高速な過渡応答特性を実現する効果が顕著になる。
In the invention according to
本発明の実施形態のモータ制御装置1について、図1〜図4を参考にして説明する。図1は、実施形態のモータ制御装置1の全体構成を示すブロック図である。モータ制御装置1は、ソフトウェアで動作するコンピュータを含んで構成されており、制御対象は三相同期モータ9、制御量はモータ9に印加する三相電圧Vu、Vv、Vwである。
A
三相同期モータ9は、図略の回転子コアに磁石を埋め込み、図略の固定子コアに電機子巻線を巻回して構成した埋込磁石同期モータであり、これに限定されない。モータ制御装置1は、外部から受け取った指令トルクTq*に等しいトルクをモータ9から出力すべく、内部演算を行って三相電圧Vu、Vv、Vwを制御する。指令トルクTq*の符号に付された上付きの*は指令の数値を意味し、以下、他の符号でも同様に*は指令の数値を意味する。モータ制御装置1は、2個の電流検出手段2v、2w、角速度検出手段3、検出電流変換部4、電流指令演算部5、電圧ベクトル演算部6、指令電圧変換部7、および電力変換手段8で構成されている。
The three-phase
2個の電流検出手段2v、2wは、モータ9の電機子巻線に接続された三相の入力線91u、91v、91wのうちのV相入力線91vおよびW相入力線91wにそれぞれ設けられている。電流検出手段2v、2wは、例えば周知の変流器や分路抵抗器などを用いて構成でき、V相電流IvおよびW相電流Iwを検出して、その検出信号を検出電流変換部4に出力する。なお、検出電流変換部4は、三相電流Iu、Iv、Iwのベクトル和がゼロであることを利用して、三相目のU相電流Iuを演算する。
The two current detection means 2v, 2w are respectively provided on the V-
角速度検出手段3は、三相同期モータ9の回転子の回転位相θを検出する角度センサ31、および回転位相θを電気角の角速度ωに変換する角速度変換部32で構成されている。角度センサ31は、例えば公知のレゾルバなどを用いて構成でき、検出した回転位相θを角速度変換部32に送出する。角速度変換部32は、2回の検出によって求めた回転位相θの変化量を経過時間で除算して(時間微分に相当)角速度ωを演算し、検出電流変換部4および指令電圧変換部7に出力する。
The angular velocity detection means 3 includes an
検出電流変換部4は、角速度ωを用いた公知の変換式により、三相電流Iu、Iv、Iwを回転子の磁石の回転位置を基準とするdq座標軸上のd軸電流Idおよびq軸電流Iqに変換し、電圧ベクトル演算部6に出力する。
The detection
電流指令演算部5は、外部から受け取った指令トルクTq*を指令d軸電流Id*および指令q軸電流Iq*に変換し、電圧ベクトル演算部6に指令する。この変換処理は、例えば予め設定された変換テーブルを用いて行うことができる。また、指令電流として指令d軸電流Id*および指令q軸電流Iq*を外部から直接受け取り、電圧ベクトル演算部6にスルーする構成であってもよい。
The current
電圧ベクトル演算部6は、d軸電流Id、q軸電流Iq、指令d軸電流Id*、および指令q軸電流Iq*に基づいて、指令d軸電圧Vd*および指令q軸電圧Vq*を演算し、指令電圧変換部7に指令する。電圧ベクトル演算部6は、後で詳述するように、比例積分制御により指令d軸電圧Vd*および指令q軸電圧Vq*を演算するd軸演算部61およびq軸演算部62、ならびに本発明の弱め磁束制御部63を有している。
The voltage vector calculation unit 6 calculates the command d-axis voltage Vd * and the command q-axis voltage Vq * based on the d-axis current Id, the q-axis current Iq, the command d-axis current Id * , and the command q-axis current Iq *. The command
指令電圧変換部7は、角速度ωを用いた公知の変換式により、指令d軸電圧Vd*および指令q軸電圧Vq*を三相電圧Vu、Vv、Vwに変換し、電力変換手段8に指令する。
The command
電力変換手段8は、三相電圧Vu、Vv、Vwを実際に生成して電機子巻線に印加する。電力変換手段8は、例えば、図略のバッテリおよびパルス幅変調回路で構成することができる。パルス幅変調回路は、バッテリの直流出力電圧の正負の極性を切替え制御するとともに、通電時間幅をパルス幅変調(PWM)により制御し、電圧実効値を調整して指令された三相電圧Vu、Vv、Vwを生成する。ここで、三相電圧Vu、Vv、Vwがバッテリの直流出力電圧を越えることはなく、直流出力電圧は本発明の制限電圧Vlimに相当する。仮に、直流出力電圧を越える大きさの三相電圧Vu、Vv、Vwが指令されても、実際の印加電圧は制限電圧Vlimで飽和する。 The power conversion means 8 actually generates three-phase voltages Vu, Vv, Vw and applies them to the armature winding. The power conversion means 8 can be constituted by, for example, a battery and a pulse width modulation circuit (not shown). The pulse width modulation circuit switches and controls the positive / negative polarity of the DC output voltage of the battery, controls the energization time width by pulse width modulation (PWM), adjusts the effective voltage value, and commands the three-phase voltage Vu, Vv and Vw are generated. Here, the three-phase voltages Vu, Vv, and Vw do not exceed the DC output voltage of the battery, and the DC output voltage corresponds to the limit voltage Vlim of the present invention. Even if the three-phase voltages Vu, Vv, and Vw having a magnitude exceeding the DC output voltage are commanded, the actual applied voltage is saturated at the limit voltage Vlim.
次に、dq座標軸上で表現される電圧方程式について説明する。公知のように、磁石埋込型の三相同期モータ9では、次の電圧方程式が成り立つ。
Next, a voltage equation expressed on the dq coordinate axis will be described. As is well known, in the three-phase

一般的に、指令トルクTq*が一定の定常状態では、電圧方程式中でトルクの発生に寄与しないd軸電流Idは概ねゼロに制御され、一方、q軸電流Iqは指令トルクTq*の大きさに対応した概ね一定値に制御される。 In general, in a steady state where the command torque Tq * is constant, the d-axis current Id that does not contribute to the generation of torque in the voltage equation is controlled to approximately zero, while the q-axis current Iq is the magnitude of the command torque Tq * . It is controlled to a substantially constant value corresponding to.
上記の電圧方程式をq軸電圧Vqについて展開表示すると、次式で示されるように4つの項を加算した式になる。
Vq=ωLd・Id+R・Iq+pLq・Iq+ωΨ
ここで、定常状態から指令トルクTq*が増加した直後を考えると、右辺第1項の(ωLd・Id)はd軸電流が概ねゼロであるので無視できる。右辺第2項の(R・Iq)は、大きな指令トルクTq*に対応する大きなq軸電流Iqを巻線抵抗R成分に抗して流すのに必要とされる所要電圧を意味する。また、右辺第3項の(pLq・Iq)は、大きなq軸電流Iqをq軸インダクタンスLq成分に抗して流すのに必要とされる所要電圧を意味する。さらに、右辺第4項の(ωΨ)は、磁石の磁束Ψによって発生する電機子反作用に抗するために必要とされる電圧である。
When the above voltage equation is expanded and displayed with respect to the q-axis voltage Vq, an equation obtained by adding four terms as shown in the following equation is obtained.
Vq = ωLd · Id + R · Iq + pLq · Iq + ωΨ
Here, considering immediately after the command torque Tq * increases from the steady state, the first term (ωLd · Id) on the right side can be ignored because the d-axis current is substantially zero. The second term (R · Iq) on the right side means a required voltage required to flow a large q-axis current Iq corresponding to a large command torque Tq * against the winding resistance R component. The third term (pLq · Iq) on the right side means a required voltage required to flow a large q-axis current Iq against the q-axis inductance Lq component. Further, the fourth term (ωΨ) on the right side is a voltage required to resist the armature reaction generated by the magnetic flux Ψ of the magnet.
したがって、指令トルクTq*が増加したときに、右辺第2項および第3項に相当するq軸電圧Vqの増加分が必要となり、印加電圧が制限電圧Vlimで飽和するおそれがある。これに対し、磁石の磁束Ψを等価的に減少させて右辺第4項を小さくする弱め磁束制御を行うことで、q軸電圧Vqの増加を抑制して電圧飽和を回避できる。すなわち、d軸電流Idを負の方向に増加させ、磁石の磁束Ψを打ち消すように電流磁界を発生させる。さらに、q軸電流Iqの増加によって演算されるq軸電圧Vqが制限電圧Vlimを超過した超過分Voverの大小に対応して、負のd軸電流Idの調整量Iadjを大小調整することで、確実に電圧飽和を回避できる。 Therefore, when the command torque Tq * increases, an increase in the q-axis voltage Vq corresponding to the second term and the third term on the right side is required, and the applied voltage may be saturated at the limit voltage Vlim. On the other hand, by performing weakening magnetic flux control that reduces the magnetic flux Ψ of the magnet equivalently and reduces the fourth term on the right side, the increase in the q-axis voltage Vq can be suppressed and voltage saturation can be avoided. That is, the d-axis current Id is increased in the negative direction, and a current magnetic field is generated so as to cancel the magnetic flux Ψ of the magnet. Furthermore, by adjusting the magnitude of the adjustment amount Iadj of the negative d-axis current Id corresponding to the magnitude of the excess Vover in which the q-axis voltage Vq calculated by increasing the q-axis current Iq exceeds the limit voltage Vlim, Voltage saturation can be avoided reliably.
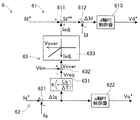
このような考え方に基づいて、実施形態では電圧ベクトル演算部6の内部構成を定めている。図2は、電圧ベクトル演算部6の内部構成を示すブロック図である。図示されるように、電圧ベクトル演算部6は、q軸演算部62、弱め磁束制御部63、およびd軸演算部61で構成されている。
Based on such an idea, the internal configuration of the voltage vector calculation unit 6 is determined in the embodiment. FIG. 2 is a block diagram showing an internal configuration of the voltage vector calculation unit 6. As shown in the figure, the voltage vector calculation unit 6 includes a q-
q軸演算部62は、図2のブロック図の下側に示された加算器621およびq軸比例積分制御器622(q軸PI制御器)によって構成されており、左側から右側へと演算を行う。加算器621は、q軸指令電流Iq*からq軸電流Iqを減算してq軸電流偏差ΔIqを求め、q軸比例積分制御器622(q軸PI制御器)および弱め磁束制御部63の乗算器631に出力する。q軸比例積分制御器622は、q軸電流偏差ΔIqを用い、次の演算式で指令q軸電圧Vq*(t)を求めて出力する。
The q-
弱め磁束制御部63は、図2のブロック図の中央に示された乗算器631、加算器632、および調整量制御器633で構成されており、下側から上側へと演算を行う。乗算器631は、q軸電流偏差ΔIqに係数Kを乗算して所要電圧Vreqを求め、加算器632に出力する。係数Kは、q軸インダクタンスLqを制御サイクルタイムΔTで除算した値であり、所要電圧Vreqは次式で求められる。
Vreq=Lq×ΔIq/ΔT
この式は、インダクタンスLの電圧vと電流iの関係を示す次の一般式に一致している。
v=L×di/dt
The flux
Vreq = Lq × ΔIq / ΔT
This equation agrees with the following general equation showing the relationship between the voltage v of the inductance L and the current i.
v = L × di / dt
加算器632は、制限電圧Vlimから所要電圧Vreqを減算して電圧の超過分Vover(負値)を求め、調整量制御器633に出力する。調整量制御器633は、超過分Voverに対応して、指令d軸電流Id*を負側に増加させる調整量Iadjを決定する。調整量制御器633は、図2に定性的に示されるように、超過分Voverが発生していないときには調整量Iadjをゼロとする。また、調整量制御器633は、超過分Voverが発生しているときには、超過分Vover(負値)に対応して負側に増加する調整量Iadj(負値)を求め、d軸演算部61の加算器611に出力する。なお、調整量制御器633の特性は、制御対象となるモータ9に対応して予め設定しておくようにする。
The
d軸演算部61は、図2のブロック図の上側に示された加算器611、加算器612、およびd軸比例積分制御器613(d軸PI制御器)で構成されており、左側から右側へと演算を行う。加算器611は、d軸指令電流Id*に調整量Iadj(負値)を加算して調整d軸指令電流Id**を求め、加算器612に出力する。加算器612は、調整d軸指令電流Id**からd軸電流Idを減算してd軸電流偏差ΔIdを求め、d軸比例積分制御器613(d軸PI制御器)に出力する。d軸比例積分制御器613は、次の演算式により、指令d軸電圧Vd*(t)を求めて出力する。
The d-
次に、実施形態のモータ制御装置1の作用および効果について、従来技術と比較して説明する。従来技術のモータ制御装置は、電圧ベクトル演算部6Xの内部構成が実施形態と異なり、他の部位2v、2w、3、4、5、7、8は実施形態と同じである。図3は、従来技術のモータ制御装置の電圧ベクトル演算部6Xの内部構成を示すブロック図である。図示されるように、従来技術の電圧ベクトル演算部6Xは、d軸演算部65およびq軸演算部66で構成され、弱め磁束制御部63を備えていない。
Next, the operation and effect of the
従来技術のd軸演算部65で、加算器651は、d軸指令電流Id*からd軸電流Idを減算してd軸電流偏差ΔIdを求め、d軸比例積分制御器652(d軸PI制御器)に出力する。d軸比例積分制御器652は、実施形態と同様の比例積分制御により、指令d軸電圧Vd*(t)を求めて出力する。
In the conventional d-
同様に、従来技術のq軸演算部66で、加算器661は、q軸指令電流Iq*からq軸電流Iqを減算してq軸電流偏差ΔIqを求め、q軸比例積分制御器662(q軸PI制御器)に出力する。q軸比例積分制御器662は、実施形態と同様の比例積分制御により、指令q軸電圧Vq*(t)を求めて出力する。
Similarly, in the conventional q-
図4は、実施形態および従来技術において、電流指令(q軸電流指令Iq*)が増加したときのd軸電流Id1、Id2、およびq軸電流Iq1、Iq2の変化をシミュレーションした結果を示す図である。図4の横軸は時間t(sec)、縦軸は電流(%)を表し、実施形態におけるd軸電流Id1およびq軸電流Iq1を実線で示し、従来技術におけるd軸電流Id2およびq軸電流Iq2を破線で示している。シミュレーションの条件としては、時刻t0でq軸電流指令Iq*が0%から100%に増加し、d軸電流指令Id*が0%で不変の場合を設定した。 FIG. 4 is a diagram illustrating a result of simulating changes in the d-axis currents Id1 and Id2 and the q-axis currents Iq1 and Iq2 when the current command (q-axis current command Iq * ) increases in the embodiment and the prior art. is there. The horizontal axis in FIG. 4 represents time t (sec), the vertical axis represents current (%), the d-axis current Id1 and the q-axis current Iq1 in the embodiment are shown by solid lines, and the d-axis current Id2 and the q-axis current in the prior art. Iq2 is indicated by a broken line. As conditions for the simulation, the case where the q-axis current command Iq * increased from 0% to 100% at the time t0 and the d-axis current command Id * was 0% and remained unchanged was set.
シミュレーションの結果、実施形態では、d軸電流Id1は時刻t0から負の方向に増加して弱め磁束制御が開始され、d軸電流Id1の負値が時刻t1まで継続している。一方、q軸電流Iq1は、時刻t0から概ね直線的に増加し、時刻t1を過ぎてからq軸電流指令Iq*の100%に接近して増加傾向が鈍化し、時刻t2で概ね100%に到達している。 As a result of the simulation, in the embodiment, the d-axis current Id1 increases in the negative direction from the time t0 and the flux-weakening control is started, and the negative value of the d-axis current Id1 continues until the time t1. On the other hand, the q-axis current Iq1 increases substantially linearly from the time t0, and after the time t1, the q-axis current Iq1 approaches 100% of the q-axis current command Iq * , and the increasing trend slows down to approximately 100% at the time t2. Has reached.
これに対し従来技術では、d軸電流Id2は時刻t0から正の方向に若干増加して弱め磁束制御は行われず、d軸電流Id2の正値が長く継続している。一方、q軸電流Iq2は、時刻t0から概ね直線的に増加するのは実施形態と同様であるが、増加傾向の鈍化が早く始まる。このため、q軸電流Iq2が概ね100%に到達するのは実施形態の時刻t2よりもかなり遅れた時刻t3になっている。 On the other hand, in the prior art, the d-axis current Id2 slightly increases in the positive direction from time t0 and the flux-weakening control is not performed, and the positive value of the d-axis current Id2 continues for a long time. On the other hand, the q-axis current Iq2 increases almost linearly from the time t0 in the same manner as in the embodiment, but the increasing trend starts earlier. For this reason, the q-axis current Iq2 reaches approximately 100% at time t3 which is considerably delayed from time t2 in the embodiment.
したがって、両者を比較すると実施形態のほうが指令電流に相当する電流値100%に短時間で到達しており、高速な過渡応答特性を実現できた。また、実施形態において、q軸電流Iq1のオーバーシュートや振動などの不安定現象は発生しておらず、指令電流の増加に対応して安定的に応答している。 Therefore, comparing the two, the embodiment reached the current value of 100% corresponding to the command current in a shorter time, and realized a high-speed transient response characteristic. Further, in the embodiment, an unstable phenomenon such as overshoot or vibration of the q-axis current Iq1 does not occur, and it responds stably in response to an increase in the command current.
なお、特許文献1に例示される弱め磁束制御を行う従来技術では、電力変換部7から指令される三相電圧Vu、Vv、Vwが制限電圧Vlimを超過してから、初めて弱め磁束制御を開始することになる。これに対し本発明では、指令電流が増加した時点で迅速に弱め磁束制御を開始することができる。つまり、従来技術が電圧飽和を検出してのフィードバック制御であるのに対し、本発明は電圧飽和を予測するフィードフォワード制御ということができ、従来よりも高速な応答特性を可能としている。
In the prior art that performs the flux-weakening control exemplified in
さらに、実施形態のモータ制御装置1の弱め磁束制御部63は、q軸電流偏差ΔIqにq軸インダクタンスLqを乗算し制御サイクルタイムΔTで除算して所要電圧Vreqを演算するので、電機子巻線のインダクタンス成分を考慮して高精度に所要電圧Vreqを演算できる。加えて、弱め磁束制御部63は、所要電圧Vreqが制限電圧Vlimを超過した超過分Voverに対応して、指令d軸電流Id*を負側に増加させる調整量Iadjを決定するので、実際に印加する三相電圧Vu、Vv、Vwが飽和することを確実に回避できる。
Furthermore, the flux-weakening
また、電圧ベクトル演算部6は、比例積分制御方式のd軸演算部61およびq軸演算部62と、弱め磁束制御部63とで構成されるので、安定的でかつ高速な過渡応答特性を実現する効果が顕著になる。
In addition, the voltage vector calculation unit 6 is composed of the proportional-integral control d-
なお、d軸演算部61およびq軸演算部62は、比例積分制御方式に限定されず、その他の制御方式を用いることもできる。本発明は、その他にも様々な応用や変形が可能である。
The d-
1:モータ制御装置
2v、2w:電流検出手段
3:角速度検出手段 31:角度センサ 32:角速度変換部
4:検出電流変換部
5:電流指令演算部
6:電圧ベクトル演算部
61:d軸演算部 611:加算器 612:加算器
613:d軸比例積分制御器 62:q軸演算部 621:加算器
622:q軸比例積分制御器 63:弱め磁束制御部 631:乗算器
632:加算器 633:調整量制御器
7:指令電圧変換部
8:電力変換手段
9:三相同期モータ
6X:従来技術の電圧ベクトル演算部 65:d軸演算部 66:q軸演算部
Tq*:指令トルク Id*:指令d軸電流 Iq*:指令q軸電流
Vd*:指令d軸電圧 Vq*:指令q軸電圧
Vu、Vv、Vw:三相電圧 Iv、Iw:V相およびW相電流
θ:回転位相 ω:角速度
Id:d軸電流 Id**:調整d軸指令電流 ΔId:d軸電流偏差
Iq:q軸電流 ΔIq:q軸電流偏差
Vlim:制限電圧 Vreq:所要電圧 Vover:超過分
Iadj:調整量
1:
61: d-axis calculation unit 611: adder 612: adder
613: d-axis proportional integration controller 62: q-axis calculation unit 621: adder
622: q-axis proportional integral controller 63: Weak magnetic flux controller 631: Multiplier
632: Adder 633: Adjustment amount controller 7: Command voltage conversion unit 8: Power conversion means 9: Three-phase
Claims (4)
前記回転子が回転する角速度を検出する角速度検出手段と、
検出した三相電流を、前記回転子の磁石の回転位置を基準とするdq座標軸上のd軸電流およびq軸電流に変換する検出電流変換部と、
外部からの指令トルクまたは指令電流を前記dq座標軸上の指令d軸電流および指令q軸電流に変換する電流指令演算部と、
前記d軸電流、前記q軸電流、前記指令d軸電流、および前記指令q軸電流に基づいて、前記dq座標軸上の指令d軸電圧および指令q軸電圧で表される指令電圧を演算する電圧ベクトル演算部と、
前記指令d軸電圧および前記指令q軸電圧を三相電圧に変換する指令電圧変換部と、
前記三相電圧を生成して前記電機子巻線に印加する電力変換手段と、を備えるモータ制御装置であって、
前記電圧ベクトル演算部は、前記指令q軸電流から前記q軸電流を減算したq軸電流偏差を補償するために必要とされる所要電圧を演算し、前記所要電圧が所定の制限電圧を超過したときに前記指令d軸電流を負側に増加させるように制御する弱め磁束制御部を含むモータ制御装置。 Current detecting means for detecting a three-phase current flowing in the armature winding of a three-phase synchronous motor having a magnet in a rotor and an armature winding in a stator;
Angular velocity detecting means for detecting an angular velocity at which the rotor rotates;
A detected current converter for converting the detected three-phase current into a d-axis current and a q-axis current on a dq coordinate axis with reference to the rotational position of the magnet of the rotor;
A current command calculation unit for converting an external command torque or command current into a command d-axis current and a command q-axis current on the dq coordinate axis;
Based on the d-axis current, the q-axis current, the command d-axis current, and the command q-axis current, a voltage for calculating a command voltage expressed by the command d-axis voltage and the command q-axis voltage on the dq coordinate axis A vector operation unit;
A command voltage converter that converts the command d-axis voltage and the command q-axis voltage into a three-phase voltage;
A power control means for generating the three-phase voltage and applying it to the armature winding, and a motor control device comprising:
The voltage vector calculation unit calculates a required voltage required to compensate for a q-axis current deviation obtained by subtracting the q-axis current from the command q-axis current, and the required voltage exceeds a predetermined limit voltage. A motor control device including a flux-weakening control unit that controls to increase the command d-axis current to the negative side sometimes.
前記q軸指令電流から前記q軸電流を減算してq軸電流偏差を求め、前記q軸電流偏差に基づいた比例積分制御により前記指令q軸電圧を演算するq軸演算部と、
前記q軸電流偏差にq軸インダクタンスを乗算し制御サイクルタイムで除算して前記所要電圧を演算し、前記所要電圧が前記制限電圧を超過した超過分に対応して、前記指令d軸電流を負側に増加させる調整量を決定する弱め磁束制御部と、
前記d軸指令電流に前記調整量を考慮した後に前記d軸電流を減算してd軸電流偏差を求め、前記d軸電流偏差に基づいた比例積分制御により前記指令d軸電圧を演算するd軸演算部と、を有するモータ制御装置。 The voltage vector calculation unit according to claim 1,
A q-axis calculating unit that subtracts the q-axis current from the q-axis command current to obtain a q-axis current deviation, and calculates the command q-axis voltage by proportional-integral control based on the q-axis current deviation;
The required voltage is calculated by multiplying the q-axis current deviation by the q-axis inductance and dividing by the control cycle time, and the command d-axis current is negative in response to an excess of the required voltage exceeding the limit voltage. A flux-weakening control unit that determines an adjustment amount to be increased to the side,
The d-axis that calculates the command d-axis voltage by proportional-integral control based on the d-axis current deviation by subtracting the d-axis current after taking the adjustment amount into consideration for the d-axis command current. A motor control device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012048823A JP2013187931A (en) | 2012-03-06 | 2012-03-06 | Motor control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012048823A JP2013187931A (en) | 2012-03-06 | 2012-03-06 | Motor control device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013187931A true JP2013187931A (en) | 2013-09-19 |
Family
ID=49388951
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012048823A Pending JP2013187931A (en) | 2012-03-06 | 2012-03-06 | Motor control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013187931A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104728090A (en) * | 2013-12-18 | 2015-06-24 | 海尔集团公司 | Air conditioner inverter compressor frequency-domain constant torque control system and method |
| CN104917438A (en) * | 2015-06-09 | 2015-09-16 | 同济大学 | Improved-overmodulation based method for improving alternating current motor torque output capacity |
| JP2018098843A (en) * | 2016-12-09 | 2018-06-21 | 株式会社明電舎 | Inverter control device |
| CN109804550A (en) * | 2016-10-25 | 2019-05-24 | 密克罗奇普技术公司 | Closed loop magnetic flux for permanent magnet synchronous motor weakens |
| CN112928781A (en) * | 2021-03-23 | 2021-06-08 | 南方电网科学研究院有限责任公司 | Double-fed fan transient stability control method and system, computer equipment and medium |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003040128A (en) * | 2001-07-30 | 2003-02-13 | Mitsubishi Electric Corp | Steering control device |
| US20040217729A1 (en) * | 2003-04-30 | 2004-11-04 | Visteon Global Technologies, Inc. | Electric power assist steering system and method of operation |
| JP2010057223A (en) * | 2008-08-26 | 2010-03-11 | Mitsubishi Electric Corp | Controller and motor controller |
-
2012
- 2012-03-06 JP JP2012048823A patent/JP2013187931A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003040128A (en) * | 2001-07-30 | 2003-02-13 | Mitsubishi Electric Corp | Steering control device |
| US20040217729A1 (en) * | 2003-04-30 | 2004-11-04 | Visteon Global Technologies, Inc. | Electric power assist steering system and method of operation |
| JP2010057223A (en) * | 2008-08-26 | 2010-03-11 | Mitsubishi Electric Corp | Controller and motor controller |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104728090A (en) * | 2013-12-18 | 2015-06-24 | 海尔集团公司 | Air conditioner inverter compressor frequency-domain constant torque control system and method |
| CN104917438A (en) * | 2015-06-09 | 2015-09-16 | 同济大学 | Improved-overmodulation based method for improving alternating current motor torque output capacity |
| CN109804550A (en) * | 2016-10-25 | 2019-05-24 | 密克罗奇普技术公司 | Closed loop magnetic flux for permanent magnet synchronous motor weakens |
| JP2018098843A (en) * | 2016-12-09 | 2018-06-21 | 株式会社明電舎 | Inverter control device |
| CN112928781A (en) * | 2021-03-23 | 2021-06-08 | 南方电网科学研究院有限责任公司 | Double-fed fan transient stability control method and system, computer equipment and medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5964391B2 (en) | Motor control device for controlling current phase of dq three-phase coordinate | |
| JP4881635B2 (en) | Vector controller for permanent magnet motor | |
| JP5156352B2 (en) | AC motor control device | |
| CN109874396B (en) | Inverter control device and motor drive system | |
| JP5281339B2 (en) | Synchronous motor drive system and control device used therefor | |
| JP5870591B2 (en) | Control device and control method for synchronous motor | |
| JP5717808B2 (en) | Current control device for synchronous motor | |
| JP2013187931A (en) | Motor control device | |
| JP6396869B2 (en) | Motor control device | |
| JP5332904B2 (en) | AC motor sensorless control device | |
| JP5284895B2 (en) | Winding field synchronous machine controller | |
| JP5994355B2 (en) | Control device for permanent magnet type synchronous motor | |
| JP4639832B2 (en) | AC motor drive device | |
| JP6358834B2 (en) | Vector control device, inverter incorporating the same, and inverter and motor setting device incorporating the same | |
| JP2009284598A (en) | Controller for alternating-current motors | |
| JP6848406B2 (en) | Inverter controller | |
| JP2013188074A (en) | Induction motor control device and method for controlling induction motor | |
| JP7009861B2 (en) | Motor control device | |
| JP2018520624A (en) | Motor driving apparatus and method, and motor | |
| JP2010200544A (en) | Ac motor controller and control method | |
| JP3290099B2 (en) | Control device for reluctance type synchronous motor | |
| JP2016100997A (en) | Control device of electric motor | |
| JP2013183558A (en) | Motor controller | |
| JP2003264999A (en) | Vector control device for ac motor | |
| JP7013847B2 (en) | Motor control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151124 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160125 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160621 |