JP2012256272A - 生体識別装置、及び、生体識別方法 - Google Patents
生体識別装置、及び、生体識別方法 Download PDFInfo
- Publication number
- JP2012256272A JP2012256272A JP2011129874A JP2011129874A JP2012256272A JP 2012256272 A JP2012256272 A JP 2012256272A JP 2011129874 A JP2011129874 A JP 2011129874A JP 2011129874 A JP2011129874 A JP 2011129874A JP 2012256272 A JP2012256272 A JP 2012256272A
- Authority
- JP
- Japan
- Prior art keywords
- identification
- feature
- finger
- registered
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images










Abstract
【解決手段】識別対象者の生体パターンを撮像して得られる画像から、前記生体パターンを特徴付ける複数の識別特徴量及びそれぞれの前記識別特徴量の位置を示す情報を抽出し、前記登録部に登録されている複数の登録特徴量の各々と、前記識別対象者の複数の識別特徴量の各々とが類似するか否かを判断し、任意の2つの識別特徴量の位置を示す情報から、前記2つの識別特徴量の間の距離を算出し、前記2つの識別特徴量にそれぞれ類似すると判断された2つの登録特徴量の間の距離と前記識別特徴量の間の距離との差に応じて算出されるスコアに基づいて、前記識別対象者が前記登録対象者であるか否かを識別する。
【選択図】図11
Description
知られている。例えば、指を撮像することで得られる指静脈画像に基づいて認証を行うシ
ステムとして静脈認証装置等が開発されており、特許文献1には、認証時に指の輪郭から
回転補正を行うことが示されている。また、特許文献2には、登録時に複数の角度のテン
プレートを保存しておき、それぞれに対して認証処理をすることが示されている。
は位置補正ができない。また、指の太さや形状が異なる場合、正確にテンプレートとマッ
チングできない。さらに、複数の指が画像内に存在する場合にもマッチングすることがで
きない。また、特許文献2の手法であると、回転以外に位置シフトが発生した場合、合致
するテンプレートが存在しなくなる。登録する角度が少ない場合、認証時の角度とズレが
生じて認証精度が低下する。さらに、多くの角度を登録した場合、保存領域が増大し、処
理速度も低下する。
よって、登録時の画像と認証時の画像との位置や方向が異なっていても容易かつ高精度
に認証できるようにすることが望ましい。
ここで、認証とは、登録された画像等と認証時に得られた画像等を照合することによっ
て、認証(識別)対象者が登録者であるか否かを識別し、識別結果に基づいて、例えば電
子錠等の制御対象を制御することである。したがって、認証の精度は識別の精度に依存す
るので、認証においては、登録時の画像と認証時の画像とで撮影された指の位置や姿勢が
異なっていても高精度に識別できるようにすることが望ましい。
の画像と識別時の画像との位置や方向が異なっていても容易かつ高精度に識別できるよう
にすることを目的としている。
者の生体パターンを特徴付ける登録特徴量を複数登録する登録部と、演算部と、を備え、
前記演算部は、前記撮像部を用いて識別対象者の生体パターンを撮像して得られる画像か
ら、前記生体パターンを特徴付ける複数の識別特徴量及びそれぞれの前記識別特徴量の位
置を示す情報を抽出し、前記登録部に登録されている複数の登録特徴量の各々と、前記識
別対象者の複数の識別特徴量の各々とが類似するか否かを判断し、任意の2つの識別特徴
量の位置を示す情報から、前記2つの識別特徴量の間の距離を算出し、前記2つの識別特
徴量にそれぞれ類似すると判断された2つの登録特徴量の間の距離と前記識別特徴量の間
の距離との差に応じて算出されるスコアに基づいて、前記識別対象者が前記登録対象者で
あるか否かを識別する、識別動作を行う演算部と、を備える生体識別装置である。
を複数登録する登録部と、演算部と、を備え、前記演算部は、前記撮像部を用いて識別対
象者の生体パターンを撮像して得られる画像から、前記生体パターンを特徴付ける複数の
識別特徴量及びそれぞれの前記識別特徴量の位置を示す情報を抽出し、前記登録部に登録
されている複数の登録特徴量の各々と、前記識別対象者の複数の識別特徴量の各々とが類
似するか否かを判断し、任意の2つの識別特徴量の位置を示す情報から、前記2つの識別
特徴量の間の距離を算出し、前記2つの識別特徴量にそれぞれ類似すると判断された2つ
の登録特徴量の間の距離と前記識別特徴量の間の距離との差に応じて算出されるスコアに
基づいて、前記識別対象者が前記登録対象者であるか否かを識別する、識別動作を行う演
算部と、を備える生体識別装置。
者の特徴量を複数抽出し、抽出された特徴量を登録部に登録する。また、演算部は、識別
対象者の生体パターンを撮像して得られる画像から複数の識別特徴量及びその位置情報を
抽出する。そして、登録されている複数の登録特徴量と抽出された複数の識別特徴量
とについてそれぞれ類否判断を行い、或る2つの識別特徴量と、それに類似すると判断さ
れる2つの登録特徴量についてそれぞれ特徴量間の距離を算出する。そのようにして算出
された距離のずれ量(距離の差)に応じたスコアに基づいて、識別が行なわれる。
生体パターンから抽出される特徴量を用いて識別を行なうことで、位置・方向等によら
ず正確な識別動作を行うことができる。また、2つの特徴量間の距離に基づいて類否を判
断するため偶然発生したノイズなどによって本来検出されるべき位置からずれて検出され
る特徴量はスコアに反映されにくくする等によって、偶然のミスマッチ等による影響を相
対的に小さくすることができる。したがって、撮像した画像を用いて個人の識別を行なう
生体識別装置において、登録時の画像と識別時の画像との位置や方向が異なっていても容
易かつ高精度に識別できるようにすることができる。
ーンであり、前記登録部は、前記登録特徴量と指の種類を表す指IDとを対応付けて記憶
し、前記演算部は、前記識別特徴量に類似すると判断された登録特徴量に対応付けられた
指IDに基づいて、同じ指IDに対応付けられる2つの識別特徴量の位置を示す情報から
、前記同じ指IDに対応付けられる2つの識別特徴量の間の距離を算出し、前記同じ指I
Dに対応付けられる2つの識別特徴量に対応する2つの登録特徴量の間の距離と、前記同
じ指IDに対応付けられる識別特徴量の間の距離と、の差に応じて算出されるスコアに基
づいて識別を行なうことが望ましい。
類の指から抽出され、類似すると判断される特徴量同士を比較することで、識別の精度が
向上させることができる。指の撮像を行なう場合、異なる指から抽出された特徴量同士の
位置関係は、撮像時の指の配置の違いによって一定にはならない場合がある。一方、同じ
指から抽出された特徴量同士であれば、撮像時の指の配置が変わってもその指自体につい
ての位置関係は変化しないため、正確なデータを取得することができる。また、識別動作
において指の撮像を行う際に、種類を特定せずに任意の指を撮像しても、高精度な識別が
可能となる。
の2つの識別特徴量に対応する2つの登録特徴量の間の距離と、の差が大きいほど、前記
スコアに対する重みを小さくすることが望ましい。
距離と、それに類似する2つの登録特徴量間の距離とのズレ量が大きいほど、スコアが加
算されにくくなる。すなわち、登録されているユーザーの特徴量の検出位置と、対応する
識別対象者の特徴量の検出位置との類似度が低いほど、データとしての重要度が低くなる
。これにより、ノイズ等によって本来検出されるべき位置からズレた位置に検出されるよ
うなデータや、誤検出データの影響を相対的に小さくすることができるので、識別の精度
を向上させることができる。
体パターンを撮像して得られる画像から、前記登録特徴量及びそれぞれの登録特徴量の位
置を示す情報を抽出し、前記登録対象者の指IDに対応付けて、前記登録特徴量及び前記
位置を示す情報を前記登録部に登録させることが望ましい。
とを1つの生体識別装置で行なうことができるため、ユーザーの利便性を高くすることが
できる。そして、特徴量の登録を行なう際は、登録対象者の指から抽出される特徴量を、
その抽出された指を示す指IDと対応付けて登録することで、識別動作時において指毎に
識別を行なうことができ、識別精度を高くすることができる。
象者の指の生体パターンの方が、前記撮像部によって撮像される領域が大きいことが望ま
しい。
、より大きな範囲で撮像された生体パターンの画像から抽出されるユーザーの特徴量の数
が、識別対象者の生態パターンを識別する動作において抽出される識別対象者の特徴量の
数よりも多くなる可能性が高い。つまり、識別を行なう際に用いられる可能性のあるユー
ザーの特徴量をより多く登録しておくことができるため、照合データの母体が大きくなる
。したがって、識別対象者の生体パターンから抽出される特徴量と登録されている特徴量
との照合が行ないやすくなり、より精度の高い識別を行なうことができる。
ansform)を用いて抽出されることが望ましい。
くい生体パターンの特徴量を抽出することができるようになる。したがって、生体パター
ンの撮像を行なう際に、撮像を行なうセンサーと被撮像対象(登録対象者または識別対象
者の生体パターン)との位置関係が固定されていない場合であっても、生体パターンを特
徴付ける特徴量を正確に抽出することが可能となり、撮像時の条件によらずに高精度な識
別を行うことができる。
徴付ける複数の識別特徴量及びそれぞれの識別特徴量の位置を示す情報を抽出することと
、登録対象者の生体パターンを特徴付ける複数の登録特徴量の各々と、前記複数の識別特
徴量の各々とを照合することと、任意の2つの識別特徴量の位置を示す情報から、前記2
つの識別特徴量の間の距離を算出することと、前記2つの識別特徴量にそれぞれ類似する
と判断された2つの登録特徴量の間の距離と前記識別特徴量の間の距離との差に応じて算
出されるスコアに基づいて、前記識別対象者が前記登録対象者であるか否かを識別するこ
とと、を有する生体識別方法が明らかとなる。
発明を実施するための生体識別装置の形態として、静脈識別装置1を例に挙げて説明す
る。
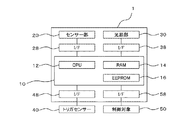
図1は、本実施形態における静脈識別装置1のブロック図である。静脈識別装置1は、
演算部10とセンサー部20と光源部30とトリガセンサー40とを備える。センサー部
20はインターフェース28を介して演算部10に接続されており、また、光源部30は
インターフェース38を介して演算部10に接続されている。また、静脈識別装置1は、
インターフェース48とインターフェース58を介してトリガセンサー40と制御対象5
0に接続されている。
)としてのRAM(Random Access Memory)14及びEEPROM(Electronically Erasab
le and Programmable Read Only Memory)16を含む。CPU12は、EEPROM16
に記憶されたプログラムを実行することにより静脈識別を行う。RAM14には、静脈識
別を行う際に必要な特徴量が演算結果として登録される。演算部10は、後述する登録動
作及び識別動作の2つの動作を静脈識別装置1に行わせることができる。
近した指を撮像するが、その際に露光時間を調整することができるようになっている。詳
細については後述するが、センサー部20は、識別動作時においては識別対象者の指の一
部の静脈パターンについて撮像をすることができればよい。一方、登録動作時においては
なるべく指の広い範囲の静脈パターンを撮像できることが望ましい。したがって、静脈識
別装置1は登録動作用と識別動作用との2種類のセンサーを備えていてもよい。
、近赤外線のLED(Light Emitting Diode)光源を含み、700nm〜900nmの波長
帯を多く含む光を照射する。この波長帯は「生体の窓」とも呼ばれ、血液のヘモグロビン
と水との両方の吸収が低くなり、生体の透過率が高くなる波長帯である。本実施形態では
、指に対して700nm〜900nmの波長帯の近赤外線を照射しながら撮像を行なうこ
とで、血液が多く存在する部分、すなわち血管の部分が影となって撮影される。したがっ
て、当該指の内部にある静脈の形状を精度良く表わした画像を得ることが可能になる。
ーを演算部10に送る装置である。トリガセンサー40には、例えば、静電容量センサー
が用いられる。このトリガセンサー40により、後述するドアなどに静脈識別装置を設け
た場合において、指をドアに近づけただけでセンサー部20が指の撮像処理を開始するこ
とができるようになる。
えば、制御対象50がコンピューターであるときには、静脈識別装置1による識別結果に
応じて識別対象者に対してコンピューターのアクセス権を付与する。また、制御対象50
が後述のようなドアの電子錠である場合には、静脈識別装置1による識別結果に応じてド
アの電子錠の開錠制御を行う。以下、制御対象50がドアの電子錠である場合について説
明を行う。
示されるように、静脈識別装置1はドアのドアノブ部に設けられる。静脈識別装置1の前
面にはパネル状のセンサー部20が設けられ(図2Bの斜線部)、センサー部20の両側
面には光源部30が設けられる(図2Bの横線部)。センサー部20は、識別対象者がド
アノブ部を握った際に、ちょうど撮像対象となる指が置かれるような位置に配置される。
の接近を感知して当該指の静脈パターンの撮像が開始される。図2Bに示されるように、
撮像時には、センサー部20の上に位置する識別対象者の指に対して光源部30から近赤
外線を照射することにより、当該指の撮像対象部分について静脈パターン画像が取得され
る。そして、取得された静脈パターンの画像に基づいて識別対象者が登録対象者(ユーザ
ー)であるか否かが判断される。識別対象者が登録対象者であると判断された場合には、
制御対象50である電子錠が開錠され、識別対象者が登録対象者でないと判断された場合
には、電子錠が開錠されない。この識別動作の詳細については後で説明する。
ろうことから、センサー部20の同じ位置・同じ角度に、毎回同じ指が置かれるとは限ら
ない。すなわち、識別の対象として撮像される静脈パターンの位置や撮像方向はその都度
変化するものと考えられる。しかし、後述するように、本実施形態では撮像時の位置や方
向、または撮像される指によらず、高い精度で識別を行なえるようになっている。
静脈識別装置1では、登録対象となるユーザー(登録対象者)毎にあらかじめ指の静脈
の形状を表す指静脈パターンを登録しておく「登録動作」と、その登録された指静脈パタ
ーンのデータに基づいて個人の識別を行なう「識別動作」とが行われる。
を行なうためには、判断基準が必要となる。そのため、まず「登録動作」において、ユー
ザー(登録対象者)毎に指の静脈パターンが静脈識別装置1の登録部(RAM14)に登
録される(登録モードとも呼ぶ)。登録された指の静脈パターンは、「識別動作」におい
て、識別対象者の静脈パターンと照合され、両パターンが一致すると判断された場合に登
録対象者が識別対象者であるか否かが識別される(識別モードとも呼ぶ)。
保存されていて、識別モードにおいて当該データを利用するようにすることもできる。こ
の場合、必ずしも静脈識別装置1において登録動作が行われなくてもよい。すなわち、登
録動作と識別動作とは、別の装置で行われてもよい。また、静脈識別装置1は、外部記憶
装置等と接続することによって識別に必要なデータを参照してもよい。
モードと登録モードとの切り替えはユーザーまたは識別対象者がモードを選択することに
よって行なわれる。以下、各動作についてそれぞれ説明する。
登録動作では、登録対象者であるユーザーの指の静脈パターンについて、その特徴を表
す「特徴量」を抽出する。そして、登録対象者毎に、当該抽出された特徴量、及び、その
特徴量の位置を示す座標について、指の種類を表す指IDに対応付けて登録する。本実施
形態における特徴量は、位置不変、及び、回転不変なものが採用される。これは、同じ人
物の指静脈パターンに対しては、撮像範囲が変化(位置変化)した場合でも、撮像方向が
回転(回転変化)した場合でも、パターンに対して同じ位置が特定され(位置不変)、そ
の位置周辺の局所領域の特徴を数値化した特徴量と同じ値で得られる(回転不変)という
特性を有するものである。
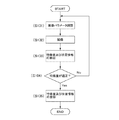
図3に、登録動作のフローを示す。登録動作は、S101〜S105の各処理を実行す
ることによって行なわれる。
初めに、撮像パラメータの調整が行なわれる(S101)。センサー部20から入力され
てくる指(静脈)の画像をもとに、演算部10によって撮像パラメータが調整され、最も
良好な画質で撮像可能なパラメータが設定される。
)。指の静脈パターン画像を撮像するにあたり、光源部30から700nm〜900nm
の波長帯を多く含む光が照射され、指の静脈が撮像される。指静脈パターンの撮像は、静
脈識別装置1のセンサー部20を用いて行うこともできるし、他の撮像可能な装置を用い
て行うこともできる。
撮像される領域を大きくする。識別の精度を高くするためには、識別に用いる可能性のあ
る領域に含まれる特徴量は全て登録しておくことが好ましい。そのため、本実施形態では
識別動作において撮像される識別対象者の静脈パターンよりも、登録動作において撮像さ
れる登録対象者の静脈パターンの方が、撮像される領域が大きくなるようにする。例えば
、登録対象者の複数の指について、それぞれの指全体を撮像する等、広い領域を撮像する
。識別動作で撮像される領域よりも広い領域を撮像するために、登録動作において撮像を
行なうセンサーと識別動作において撮像を行なうセンサーとを別個に設けてもよい。また
、そのような広い領域を撮像するにあたり、一括で撮像を行う必要はなく、いくつかの領
域に分割して撮像することとしてもよい。
ての指について静脈パターン画像を取得するのではなく、指の1本1本について別個に撮
像を行い、指毎に静脈パターン画像を取得する。例えば、登録対象者の人差し指〜小指の
4本の指について撮像を行なう際には、まず人差し指の撮像を行なって、次に中指、薬指
、小指と順番に撮像を行ない、4種類の静脈パターン画像を取得する。指の種類毎に別々
に撮像を行なうことで、次工程(S103)において指静脈パターン画像から特徴量を抽
出する際に、指の種類に対応付けて特徴量を抽出することが容易になる。なお、撮像した
指の種類を区別し、IDを付与するには、撮像を行う際に登録対象者等がユーザーインタ
ーフェースを介して入力したり、静脈識別装置1が登録対象者に対して指の種類を指示し
たりした情報を記憶するようにすればよい。
の静脈画像からは、複数の特徴量が抽出される。上述のように、指の種類毎に静脈パター
ン画像を撮像しておくことにより、それぞれの指について特徴量を抽出することができる
。また、特徴量を抽出する際(S103)には、その特徴量の位置を示す情報(例えば位
置座標)も取得する。本実施形態で、指毎に特徴量及び位置座標を抽出するのは、同じ指
から抽出される複数の特徴量のうち、任意の2つの特徴量間の距離を用いて識別を行うた
めである。なお、特徴量の位置座標を取得する際の座標軸は、静脈パターンに対して任意
の方向とすることができる。2つの特徴量間の距離は相対座標間の距離として算出される
。特徴量抽出処理の詳細は後で説明する。
であるか否かが判断される(S104)。本実施形態では、抽出された該特徴量を基準と
して静脈識別が行なわれるので、識別動作において正確な識別を行なうためには十分な量
(数)の特徴量が抽出されている必要がある。言い換えると、十分な数の特徴量が抽出さ
れていなければ、識別の基準として採用することはできない。そこで、演算部10は、抽
出された特徴量の数が所定数以上あるか否かを判断し、所定数未満である場合(S104
がNo)は特徴量が不適正なものとしてS101に戻ってパラメータの調整からやり直し
て撮像を行なう。
、特徴量が適正なものとして、指毎に抽出された特徴量、及びその位置座標は、指の種類
を表す指IDと対応付けられてRAM14に登録される(S105)。
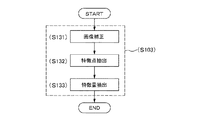
特徴量抽出処理(S103)の処理内容の詳細について説明する。図4に、特徴量抽出
処理(S103)のフローを示す。特徴量の抽出はS131〜S133の各処理を順次実
行することにより行なわれる。
るのは、主に次の3つの理由からである。(1)指の透過率には個人差があり、取得した
画像の全体の輝度がばらつくことがある。(2)指の透過率の個人差により明暗分布が生
じてしまうことがある。例えば、指の関節部は明るく画像が取得され、関節と関節との間
は暗く画像が取得される。(3)静脈と表皮との間の生体組織により、光が拡散し、撮像
した静脈パターンがぼやける場合がある。
めには、正規化が必要であり、そのために平均値(直流成分)を除去する必要がある。ま
た、上記(2)の課題を解決するためには、均一化が必要であり、そのために、緩やかな
変動を除去する必要がある。よって、これら(1)と(2)の課題を解決するために、静
脈画像に対してハイパスフィルタを適用する。
脈画像に対してアンシャープマスクを適用し高周波成分を強調する。すなわち、これらハ
イパスフィルタとアンシャープマスクを統合したフィルタを作成し適用する。具体的には
、2つのフィルタの周波数応答(MTF: Modulation Transfer Function)を周波数空間で積
算し、これを逆フーリエ変換したフィルタを適用することになる。
ずしも行われなくてもよい。
数の画像の間で、静脈画像が回転したり位置が移動したりする場合でも、静脈パターンの
決まった位置に出現する点のことを言う。すなわち、位置・角度がシフトしても静脈パタ
ーンに対する相対位置が変化しない点である。
脈パターンの特徴量を算出するためには、その中心位置(基準となる位置)を求めたいと
いう要求がある。この中心位置となる点が特徴点である。これらの要求を満たす手法の一
例として、本実施形態における特徴点抽出及び特徴量抽出では、SIFT(Scale Invaria
nt Feature Transform)が採用される。以下に、SIFTを用いて特徴点抽出及び特徴量
抽出を行なう際の方法について説明する。
点を得るために、静脈画像にガウスフィルタを適用して平均化処理を行う。そして、ある
周波数以上の成分をカットする処理を行う。また、ガウスフィルタを適用した画像の二次
微分を算出し、その極値を特徴点候補とする。さらに、ノイズに由来する特徴点を取り除
くために、極値の絶対値が所定の閾値以上の点のみを特徴点として採用する。上記におい
て、特徴点候補を得るために二次微分を算出しているのは、均一な領域ではなく、変化が
あるエッジ部を画像から抽出するためである。また、撮影において斜めから光源照射がな
されたときにおいて、一定の傾きで変化する領域が画像に生ずることがあるが、このよう
な領域を特徴点候補としないためである。二次微分の算出は、具体的には、静脈画像とガ
ウス導関数の畳み込み積分により行われる。また、これにより特徴点の位置座標が取得さ
れる。
した図(図の斜線部)と、その静脈の分岐点において特定された特徴点が示されている。
特徴点は、輝度勾配の二次微分の極値の場所が選択されるので、輝度の変化量が大きな箇
所が選択されることになる。また、二次微分の極値の場所は、一次微分の変化量が極大と
なる場所であるから、周囲に比べて曲率(すなわり曲がり方)が大きい点が選択される。
よって、静脈の分岐点や血管内部も特徴点として選択されることになる。すなわち、静脈
とそうでない場所とを分ける場所が特徴点として自動的に選択されることになる。
られたそれぞれの特徴点に対して以下の処理を行うことにより行われる。まず、特徴点周
辺の輝度勾配を算出する。
のマス目(本実施形態では、8×8のマス目)が示されている。そして、各マス目におけ
る輝度勾配がベクトル量として示されている。
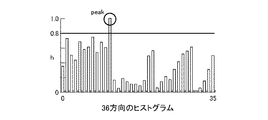
頻度の高い方向を特徴量の基準方向とする。
0度)を所定数の方向に分割した場合の各方向を表し(図7の場合は36方向に分割した
場合を表す)、縦軸は各方向における輝度の大きさhを表す。すなわち、図7では、36
方向のヒストグラムが示されている。そして、「peak」と記載した方向の値が最も高
くなっている。よって、この方向が特徴量の基準方向となる。
のマス目を作成する。そして、この8×8のマス目を4×4のマス目に対応させ、この4
×4のマス目毎の輝度勾配について、マス目ごとに8方向のベクトルに分解する。
図においては、太矢印の方向が前述の基準方向であり、基準方向に方向を合わせた8×8
のマス目を再作成し輝度勾配を求め直したものである。また、図8の右図は、この8×8
のマス目を4×4のマス目に対応させ、マス目毎に輝度勾配を8方向のベクトルに分解し
たものである。
180°、225°、270°、及び、315°のそれぞれの方向についてスカラー量が
得られる。また、4×4のマス目のそれぞれについて、これらのスカラー量が得られてい
ることになるため、4×4×8=128次元のスカラー量を得ることができることになる
。本実施形態において、特徴点における特徴量は、これら複数次元のスカラー量である。
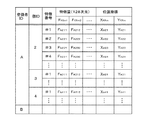
図を示す。図10に、抽出された特徴量等のデータを登録する際の表(テーブル)の一例
を示す。
なお、図9は、或る登録対象者Aの人差し指について撮像された静脈パターンとする。こ
の指静脈パターン画像から複数の特徴点が抽出される。図9の静脈画像中に複数表示され
ている丸印が、抽出された「特徴点」である。これらの特徴点についてそれぞれ特徴量が
抽出される。例えば、図9の静脈パターン画像からはA2#1〜A2#4の4点の特徴量
が抽出される。A2#1のうち「A」は登録対象者Aの登録者IDを表し、「2」は人差
し指の指IDを表し、「#1」は特徴量の番号を表す。それぞれの特徴量は上述のような
128次元のスカラー量で表される。
る。保存されるデータの項目としては、(1)登録対象者を識別する登録者ID、(2)
指の種類を識別する指ID、(3)抽出された特徴量について便宜的に付される特徴番号
(通し番号)、(4)特徴量の128次元のスカラー量、(5)特徴量の位置を表す情報
(特徴点の位置座標)等がある。
Dとして「2」、(3)抽出された特徴量についての特徴番号として「#1〜#4」、(
4)それぞれの特徴量としてFA2mn(登録対象者Aの指ID2の特徴番号mのn次元
目のスカラー量)、(5)特徴量の位置情報として、(XA2m、YA2m)(登録対象
者Aの指ID2の特徴番号mについての座標)のデータが登録される。
標ではなく、同じ指IDに属する2点の特徴量間の距離を登録してもよい。後述の識別動
作においては、特徴量間距離を用いて識別を行なうため、位置座標から距離を算出するこ
ととなる。そこで、登録動作において、あらかじめ2点間の距離を登録してもよい。
れる。なお、本明細書中において、人差し指の指IDは「2」、中指は「3」、薬指は「
4」、小指は「5」で表す。
識別動作は、登録対象者毎に登録されている特徴量(登録特徴量)と、識別対象者の静
脈パターン画像から抽出される特徴量(識別特徴量)とを照合し、登録特徴量と識別特徴
量との対応関係を判定する。そして、或る2つの識別特徴量の間の距離と、その2つの識
別特徴量に対応する2つの登録特徴量間の距離とを比較して、その距離の差に基づいて、
登録されているいずれかのユーザーと識別対象者とが同一人物であるか否かを判定する処
理である。
ては、識別モードの状態で待機している。この時にトリガセンサー40が静脈識別装置1
へ識別対象者の指が接近するのを検知すると、以下のような識別動作が開始され、演算部
10によって識別の許否が判断される。
図11に、識別動作のフローを示す。識別動作はS501〜S509の各処理を実行す
ることによって行なわれる。
501)。すなわち、センサー部から入力されてくる指(静脈)の画像をもとに、演算部
10によって撮像パラメータが調整され、最も良好な画質で撮像可能なパラメータが設定
される。
脈画像の撮像は、識別対象者がドア(図2参照)を開こうとしてドアノブを握ったタイミ
ングで行なわれる。このとき、光源部30から700nm〜900nmの波長帯を多く含
む近赤外線を照射しながらセンサー部20を用いて1回の撮像が行なわれる。本実施形態
では、位置不変・回転不変な特性を有する特徴量を用いて識別を行なう。したがって、識
別時における指の位置・方向は、登録時における指の位置・方向とずれていてもよい。つ
まり、ユーザーは撮像の際に指の位置合わせ等の細かい調整をする必要がなく、ユーザー
にとって利便性の高いものとなっている。
指の静脈パターンの一部分を撮像しただけでも、個人の識別を行なう際に必要な数の特徴
量を抽出することが可能だからである。登録動作において、登録対象者毎に複数の指につ
いての静脈パターンを撮像し、それぞれの指(例えば、人差し指〜小指までの4本分の指
)について複数の特徴量及び位置情報が登録されている(前述の登録特徴量)。そのため
、識別動作においては、識別対象者の指の一部(例えば、人差し指の一部)から抽出され
る特徴量を照合するだけで、識別の精度を確保することができる。
徴付ける特徴量である識別特徴量等の抽出が行われる(S503)。本工程は、登録動作
時(S103)と同様にして行なうことができ、1つの静脈画像から複数の特徴量、及び
その特徴量の位置を示す情報(位置座標)が抽出される。例えば、或る識別対象者Qの静
脈パターン画像から、m個の特徴量(Q#1〜Q#m)、及び、その位置を示す情報(そ
れぞれの特徴点の位置座標(XQ1,YQ1)〜(XQm,YQm))が識別特徴量とし
て抽出される。なお、識別動作における指静脈パターンの撮像(S502)では不特定の
指が撮像されるため、抽出された特徴量がそれぞれどの指の静脈パターンから抽出された
ものであるかを判断することはできない。つまり、S503の段階では、上述の識別特徴
量(Q#1〜Q#m)は指IDに関する情報を含まないデータである。
な数の識別特徴量を抽出することができていれば(S504)、抽出された当該特徴量に
ついての照合処理(S505)が行なわれる。なお、S504は登録動作におけるS10
4と同様にして行うことができる。
徴量間の距離が算出され、その距離に基づいて、該識別対象者のスコアが算出される。
おいて登録されている登録対象者(登録されているユーザー)の特徴量(登録特徴量)と
の間で、類似する(対応する)特徴量の有無が判断される。そして、或る2つの識別特徴
量間の距離と、その2つの識別特徴量に類似する(対応する)登録特徴量間の距離との差
に応じて識別対象者のスコアが算出される。照合処理(S505)の詳細は後で説明する
。
コアが加算されやすくなる。言い換えると、識別対象者の静脈パターンと、登録対象者の
うちのいずれかの静脈パターンとが類似しているほど、スコアが高い値となる。
る(S506)。上述のように、スコアが高いほど、識別対象者の静脈パターンと、登録
対象者の静脈パターンとの類似度が高いことを示しているので、閾値の値を適当に設定す
ることにより、個人の識別を精度良く行なうことができる。
)には、識別対象者と登録対象者とが一致すると判定する(S507)。その際、識別(
識別対象者が登録されているか否か)の他に、識別対象者がどの登録対象者に該当するか
の特定も可能である。一方、識別対象者のスコアが所定の閾値よりも小さい場合(S50
6がNo)には、識別対象者と登録対象者とが一致しないと判定する(S508)。
例えば、図2Aのように制御対象50がドアの電子錠である場合には、識別対象者と登録
対象者とが一致すると判定されれば開錠され、識別対象者と登録対象者とが一致しないと
判定されれば開錠されない。
照合処理(S505)の詳細について説明する。図12に、照合処理のフローを示す。
照合処理は、演算部10によってS551〜S558の各処理を実行することにより行な
われる。なお、以下では、特徴量抽出処理(S503)において、或る識別対象者Qの指
静脈パターンから(Q#1〜Q#m)のm個の特徴量(特徴番号#1〜#mで表現される
特徴量)が抽出されているものとして説明を行なう。
j=1,2,3…)の識別特徴量Q#jが選択される(S551)。例えば、照合処理の
開始時点では、まず第1番目の特徴量Q#1が選択される。
断される(S552)。特徴量の「類否(類似するか否か)」は、比較する2つの特徴量
ベクトル間におけるユークリッド距離を算出し、算出されたユークリッド距離とあらかじ
め設定してある所定の閾値とを比較することによって判断することができる。これらの距
離の値が所定の閾値よりも小さい場合には、両者のベクトルが非常に近いことを示すので
2つの特徴量は類似度が高いと判定することができる。
ID2)に対応付けられたi番目(特徴番号が#i)の登録特徴量「A2#i」との間で
、ユークリッド距離が算出される。識別特徴量Q#jと登録特徴量A2#iとの間のユー
クリッド距離が所定の閾値よりも小さい場合、Q#jとA2#iとは類似する特徴量であ
ると判断される。また、識別特徴量Q#jと登録特徴量A2#iとが非類似(閾値以上)
であった場合は、登録対象者Aの人差し指に対応付けられた次(i+1番目)の登録特徴
量A2#i+1との間で、類否が判断される。この動作を繰り返すことにより、選択され
た識別特徴量Q#jと登録対象者Aの人差し指に対応付けられた全て(n個とする)の登
録特徴量(A2#1〜A2#n)との類似判断が順次行なわれる。そして、登録対象者A
の人差し指に対応付けられた全ての登録特徴量(A2#1〜A2#n)の中に、識別特徴
量Q#jと類似するものがない場合は、次に登録対象者Aの中指(指ID3)に対応付け
られた特徴量(A3#1〜A3#n)との類否が判断される。このようにして、選択され
た各識別特徴量と登録特徴量との間で順次類否判断が行なわれる。
距離やマハラノビスの距離に基づいて類似判断を行なうこととしてもよい。
つかった場合(S552がYes)は、その識別特徴量Q#jについての位置座標(XQ
j′,YQj′)が、その類似する登録特徴量に対応付けられた指IDと共に一時的にR
AM14に登録される(S553)。例えば、上述の例において選択された識別特徴量Q
#1が、登録特徴量中の登録対象者Aの人差し指に対応付けられた1番目(特徴番号が#
1)の登録特徴量A2#1と類似すると判断されたとする。この場合、識別特徴量Q#1
の位置座標(XQ1′,YQ1′)は、登録対象者「A」の指ID「2」の特徴番号「#
1」に対応付けて(XA21′,YA21′)として保存される。なお、1つの識別特徴
量に対して類似すると判断された登録特徴量が複数あった場合には、類似すると判断され
た全ての登録特徴量について同様に対応付けを行ってもよい。
指の特徴量にも類似しなかった場合(S552がNo)は、識別特徴量Q#1についての
データは保存されない。
o)は、該特徴量Q#j+1について上述の(S551〜S553)の処理が繰り返され
る(S554)。
徴量のうちから異なる2つの識別特徴量が選択され、当該2つの識別特徴量間の距離r′
が算出される(S555)。例えば、登録対象者Aの指ID2の1番目の登録特徴量に対
応する識別特徴量の位置座標(XA21′,YA21′)と、登録対象者Aの指ID2の
2番目の登録特徴量に対応する識別特徴量の位置座標(XA22′,YA22′)から識
別特徴量間距離r12′が算出される。
量(X**l′,Y**l′)、及び第m番目の登録特徴量と対応する識別特徴量(X*
*m′,Y**m′)の2点間の距離rlm′は、次の一般式(1)によって算出される
。
識別特徴量間の距離が算出される。また、全ての組み合わせについて距離を算出するので
はなく、その一部について選択的に距離を算出することとしてもよい。
は算出されない。例えば、登録対象者Aの人差し指に対応付けられた或る識別特徴量と、
登録対象者Aの中指に対応付けられた或る識別特徴量との間の距離は算出されない。異な
る指から抽出される2点の特徴量間の位置関係は、撮像時の指の開き具合等によって変動
するため、識別の基準にすることが適切でないからである。一方、同じ指から抽出される
2つの特徴量間の位置関係は、前述のように位置・方向によらないため、同じ登録対象者
の同じ指IDに対応付けられた識別特徴量間の距離は不変である。したがって、同じ指I
Dに対応付けられた識別特徴量間の距離r′を用いて個人の識別を精度よく行なうことが
可能となる。
556)。上述の例の識別特徴量間距離r12′に対応する距離としては、登録対象者A
の指ID2の1番目の登録特徴量の位置座標(XA21,YA21)、及び2番目の登録
特徴量の位置座標(XA22,YA22)との間の距離r12が算出される。なお、S5
55の工程とS556の工程とで実行される順番を逆にしてもよい。
,Y**m)の2点間の距離rlmは、次の一般式(2)によって算出される。
述の識別特徴量間の距離r12′とそれに対応する登録特徴量間の距離r12との差(ズ
レ量)に応じた値としてS12が算出される。
の差(ズレ量)に応じた値Slmは、次の一般式(3)によって算出される。

応する2つの登録特徴量間の距離rlmとの類似度を表す量であると言える。すなわち、
rlm′とrlmとの差が大きいほどSlmの値は小さく算出され、逆にrlm′とrl
mとの差が小さいほどSlmの値は大きく算出される。
)の組み合わせについてそれぞれ算出し、その合計値を識別対象者のスコア候補とする。
そして、指ID毎に求められたスコア候補のうち、最大値を示すものが識別対象者のスコ
アとして算出される(S558)。算出された識別対象者のスコアと前述の閾値を比較す
ることにより、識別許否の判断がなされる(S506)。
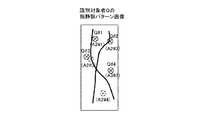
識別動作の流れについて、具体例を用いて説明する。図13は、或る識別対象者Qの指
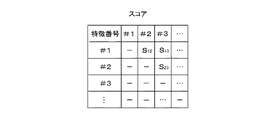
静脈パターン画像から識別特徴量を抽出する動作について説明する図である。図14は、
抽出された識別特徴量をデータ化した表の一例を示す図である。
ターン画像が得られる(S502)。この指静脈パターン画像から複数の識別特徴量が抽
出される(S503)。図13の静脈パターン画像中に複数表示されている丸印(実線)
が、抽出された「特徴点」であり、これらの特徴点についてそれぞれ識別特徴量とその座
標とが抽出される。例えば、図13の静脈パターン画像からはQ#1〜Q#4の4点の特
徴量が抽出される。なお、同図の点線で描かれた丸印は、図9において抽出された登録対
象者Aの登録特徴量を示すものである。
5)、登録対象者のいずれかの登録特徴量との類否が判断される(S552)。その結果
、図13において、Q#1と登録対象者Aの人差し指の1番目の登録特徴量A2#1とが
類似するものと判断される。同様に、Q#2とA2#2とが類似し、Q#3とA2#3と
が類似するものと判断される。識別特徴量Q#3(実線で描かれた丸印)は登録特徴量A
2#3(点線で描かれた丸印)の位置からややずれた位置で抽出されているが、前述のS
552の処理により、両特徴量間の距離が所定の閾値より小さければ両者は類似するもの
と判断される。また、Q#4と登録対象者Aの中指の2番目の登録特徴量A3#2とが類
似するものと判断される。なお、図13において、図9のA2#4に対応する識別特徴量
は抽出されなかったものとする。
的に保存される(S553)。保存されるデータの内容は、その識別特徴量と類似する登
録特徴量に対応付けられる登録者ID、指ID、及び特徴番号と、当該識別特徴量の位置
座標である。例えば、図13において、識別特徴量Q#1と登録特徴量A2#1とが類似
すると判断されるので、識別特徴量Q#1の位置座標(X1′,Y1′)が、登録対象者
Aの登録者ID「A」及び指ID「2」及び特徴番号「#1」と対応付けられ、(XA2
1′,YA21′)として保存される(図14)。同様にして、図13から抽出される4
つの特徴量についてのデータが、それぞれ類似する登録特徴量に対応付けて保存される。
うに、特徴量間の距離は同じ指IDに対応付けられた2つの識別特徴量の間の距離として
算出される。図14で、指ID2(人差し指)に対応付けられた識別特徴量のデータが3
点分保存され、指ID3(中指)に対応付けられた識別特徴量のデータが1点分保存され
ている。そこで、指ID2に対応付けられた3点の識別特徴量の位置情報(図14の破線
で囲まれた領域のデータ)を用いて距離を算出する。本例においては、指ID3に対応付
けられる識別特徴量が1点しか抽出されていないため、指ID3についての識別特徴量間
の距離を算出することはできないが、通常は指ID毎に特徴量間の距離が算出される。
別特徴量に対応する2つの登録特徴量の間の距離を示す表の一例である。
に対応する識別特徴量の座標(XA21′,YA21′)と、登録対象者Aの指ID2の
特徴番号#2に対応する識別特徴量の座標(XA22′,YA22′)との間の距離r1
2′が算出される(S555)。距離の算出方法は前述の一般式(1)による。同様にし
て、#1と#3との距離r13′、及び、#2と#3との距離r23′が算出される。こ
れにより、図15に示されるような3つの識別特徴量間の距離r12′〜r23′が求め
られる。
例では、識別特徴量の座標(XA21′,YA21′)に対応する登録特徴量A2#1の
座標(XA21,YA21)、及び、識別特徴量の座標(XA22′,YA22′)に対
応する登録特徴量A2#2の座標(XA22,YA22)との間の距離r12が算出され
る。距離の算出方法は前述の一般式(2)による。同様にして、#1と#3との距離r1
3、及び、#2と#3との距離r23が算出される。これにより、図16に示されるよう
な登録対象者Aの指ID2の#1〜#3の登録特徴量間の距離r12〜r23が求められ
る。
徴量間の距離r12〜r23との差(ズレ量)に応じた値Sをそれぞれ算出する(S55
7)。図17は、識別特徴量間の距離と、それに対応する登録特徴量間の距離のズレ量に
応じた値Sを示す表の一例である。本例では、識別特徴量間の距離r12′とそれに対応
する登録特徴量間の距離r12とのズレ量に応じた値としてS12が算出される。S12
の算出は前述の一般式(3)による。同様にして、r13′とr13とのズレ量に応じた
値S13、及び、r23′とr23とのズレ量に応じた値S23が算出される。
出され、そのうちの最大値を示す値が識別対象者のスコアとされる(S558)。本例の
場合、指ID2についてのみズレ量が算出されているので、識別対象者のスコアは当該ズ
レ量の総和(S12+S13+S23)となる。このスコアと所定の閾値とを比較して、
当該スコアの方が大きければ識別が許可される。
本実施形態では、識別動作において、識別対象者の静脈パターンを、位置・方向によら
ずに撮像して得られる画像から、当該静脈パターンを特徴付ける複数の識別特徴量及びそ
の識別特徴量に関する位置情報を抽出する。そして、登録対象者の静脈パターンとして登
録されている複数の登録特徴量と、抽出された識別特徴量とを照合し、同じ指に対応付け
られる識別特徴量のうち、或る2つの識別特徴量の位置を示す情報から、その2つの識別
特徴量の間の距離を算出する。一方、その2つの識別特徴量に対応する2つの登録特徴量
の間の距離も算出する。そして、識別特徴量間の距離とそれに対応する登録特徴量間の距
離の差に応じて識別対象者のスコアを算出し、所定の閾値とを比較することにより、静脈
識別を行なう。
響を小さくするためである。例えば、ノイズ等の影響によって、識別特徴量が本来抽出さ
れるべき位置からズレた位置で誤検出された場合、対応する登録特徴量間距離とのズレ量
が大きくなる。両特徴量間の距離の差(ズレ量)が大きいと、一般式(3)によって、S
値が小さく算出されるため、識別対象者のスコアに対する重みが小さくなる。逆に、識別
特徴量と登録特徴量との位置のズレが小さい場合、両特徴量間の差(ズレ量)も小さくな
りS値が大きく算出され、識別対象者のスコアに対する重みが大きくなる
与える相対的な影響が小さくなるので、本来の特徴量としてカウントされるべきデータの
みによって識別の許否が判断されることとなり、識別の精度が向上する。
精度に識別できるようになる。
一実施形態としての静脈識別装置を説明したが、上記の実施形態は、本発明の理解を容
易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、
その趣旨を逸脱することなく、変更、改良され得ると共に、本発明にはその等価物が含ま
れることは言うまでもない。特に、以下に述べる実施形態であっても、本発明に含まれる
ものである。
上述の実施形態において、生体識別装置の例として静脈パターンを用いて識別を行なう
静脈識別装置1を挙げて説明しているが、この限りではなく、静脈パターン以外の人間の
生体パターンを捉えて識別を行なう装置であってもよい。例えば、指の指紋等の画像を用
いて個人の識別を行なうことも可能である。
なう静脈識別装置1を挙げて説明しているが、この限りではなく、指以外の生体(体の部
位)を捉えて識別を行なう装置であってもよい。例えば、手のひら等の静脈パターンを用
いて個人の識別を行なうことも可能である。
上述の実施形態において、特徴点の抽出及び特徴量の抽出を行なう際の手法としてSI
FT特徴量を用いた例について説明しているが、この限りではない。例えば、SURF(S
peeded Up Robust Features)、GLOH(Gradient Location and Orientation Histogram
)等の手法を用いることとしてもよい。
10 演算部、12 CPU、14 RAM、16 EEPROM、
20 センサー部、
30 光源部、
40 トリガセンサー、
50 制御対象
Claims (7)
- 生体パターンを撮像する撮像部と、
登録対象者の生体パターンを特徴付ける登録特徴量を複数登録する登録部と、
演算部と、を備え、
前記演算部は、
前記撮像部を用いて識別対象者の生体パターンを撮像して得られる画像から、前記
生体パターンを特徴付ける複数の識別特徴量及びそれぞれの前記識別特徴量の位置を示す
情報を抽出し、
前記登録部に登録されている複数の登録特徴量の各々と、前記識別対象者の複数の
識別特徴量の各々とが類似するか否かを判断し、
任意の2つの識別特徴量の位置を示す情報から、前記2つの識別特徴量の間の距離
を算出し、
前記2つの識別特徴量にそれぞれ類似すると判断された2つの登録特徴量の間の距
離と前記識別特徴量の間の距離との差に応じて算出されるスコアに基づいて、前記識別対
象者が前記登録対象者であるか否かを識別する、
識別動作を行う演算部と、
を備える生体識別装置。 - 請求項1に記載の生体識別装置であって、
前記生体パターンは、指の静脈の形状を表す指静脈パターンであり、
前記登録部は、前記登録特徴量と指の種類を表す指IDとを対応付けて記憶し、
前記演算部は、
前記識別特徴量に類似すると判断された登録特徴量に対応付けられた指IDに基づ
いて、同じ指IDに対応付けられる2つの識別特徴量の位置を示す情報から、前記同じ指
IDに対応付けられる2つの識別特徴量の間の距離を算出し、
前記同じ指IDに対応付けられる2つの識別特徴量に対応する2つの登録特徴量の間の
距離と、前記同じ指IDに対応付けられる識別特徴量の間の距離と、の差に応じて算出さ
れるスコアに基づいて識別を行なうことを特徴とする生体識別装置。 - 請求項1または2に記載の生体識別装置であって、
前記演算部は、
前記2つの識別特徴量の間の距離と、その2つの識別特徴量に対応する2つの登録特徴
量の間の距離と、の差が大きいほど、
前記スコアに対する重みを小さくすることを特徴とする生体識別装置。 - 請求項2または3に記載の生体識別装置であって、
前記演算部は、
前記撮像部を用いて登録対象者の指の生体パターンを撮像して得られる画像から、
前記登録特徴量及びそれぞれの登録特徴量の位置を示す情報を抽出し、
前記登録対象者の指IDに対応付けて、前記登録特徴量及び前記位置を示す情報を
前記登録部に登録させることを特徴とする生体識別装置。 - 請求項4に記載の生体識別装置であって、
前記識別対象者の指の生体パターンよりも、前記登録対象者の指の生体パターンの方が
、前記撮像部によって撮像される領域が大きいことを特徴とする生体識別装置。 - 請求項1〜5のいずれかに記載の生体識別装置であって、
前記特徴量が、SIFT(Scale Invariant Feature Transform)を用いて抽出される
ことを特徴とする生体識別装置。 - 識別対象者の生体パターンを撮像して得られる画像から、前記生体パターンを特徴付け
る複数の識別特徴量及びそれぞれの識別特徴量の位置を示す情報を抽出することと、
登録対象者の生体パターンを特徴付ける複数の登録特徴量の各々と、前記複数の識別特
徴量の各々とを照合することと、
任意の2つの識別特徴量の位置を示す情報から、前記2つの識別特徴量の間の距離を算
出することと、
前記2つの識別特徴量にそれぞれ類似すると判断された2つの登録特徴量の間の距離と
前記識別特徴量の間の距離との差に応じて算出されるスコアに基づいて、前記識別対象者
が前記登録対象者であるか否かを識別することと、
を有する生体識別方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011129874A JP2012256272A (ja) | 2011-06-10 | 2011-06-10 | 生体識別装置、及び、生体識別方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011129874A JP2012256272A (ja) | 2011-06-10 | 2011-06-10 | 生体識別装置、及び、生体識別方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012256272A true JP2012256272A (ja) | 2012-12-27 |
| JP2012256272A5 JP2012256272A5 (ja) | 2014-07-10 |
Family
ID=47527767
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011129874A Withdrawn JP2012256272A (ja) | 2011-06-10 | 2011-06-10 | 生体識別装置、及び、生体識別方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012256272A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015094827A (ja) * | 2013-11-11 | 2015-05-18 | ソニー株式会社 | 画像処理装置及び画像処理方法 |
| JP2016538661A (ja) * | 2013-09-16 | 2016-12-08 | アイベリファイ インコーポレイテッド | バイオメトリックテンプレートセキュリティおよびキー生成 |
| JP6069582B2 (ja) * | 2014-03-25 | 2017-02-01 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| JP6069581B2 (ja) * | 2014-03-25 | 2017-02-01 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| WO2017038695A1 (ja) * | 2015-08-28 | 2017-03-09 | 日本電気株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JPWO2015145588A1 (ja) * | 2014-03-25 | 2017-04-13 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| JPWO2015145589A1 (ja) * | 2014-03-25 | 2017-04-13 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| WO2018198500A1 (ja) * | 2017-04-27 | 2018-11-01 | 富士通株式会社 | 照合装置、照合方法および照合プログラム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001076142A (ja) * | 1999-09-01 | 2001-03-23 | Nippon Telegr & Teleph Corp <Ntt> | 指紋画像照合方法及び装置及びこの方法を記録した記録媒体 |
| EP1239404A2 (en) * | 2001-03-07 | 2002-09-11 | Sony Corporation | Fingerprint identification system fingerprint identification apparatus, fingerprint identification method, and biometric identification apparatus |
| JP2005293399A (ja) * | 2004-04-02 | 2005-10-20 | Matsushita Electric Ind Co Ltd | 個人認証方法と装置 |
| JP2007075305A (ja) * | 2005-09-14 | 2007-03-29 | Hitachi Ltd | 個人認証装置及び方法 |
| JP2009009434A (ja) * | 2007-06-29 | 2009-01-15 | Hitachi Omron Terminal Solutions Corp | 生体認証処理システム |
| US20090185746A1 (en) * | 2008-01-22 | 2009-07-23 | The University Of Western Australia | Image recognition |
| EP2237226A1 (en) * | 2007-12-26 | 2010-10-06 | NEC Corporation | Inter-pattern feature corresponding device, inter-pattern feature corresponding method used for the same, and program therefor |
| JP2012098974A (ja) * | 2010-11-04 | 2012-05-24 | Hitachi Ltd | 生体認証装置および方法 |
-
2011
- 2011-06-10 JP JP2011129874A patent/JP2012256272A/ja not_active Withdrawn
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001076142A (ja) * | 1999-09-01 | 2001-03-23 | Nippon Telegr & Teleph Corp <Ntt> | 指紋画像照合方法及び装置及びこの方法を記録した記録媒体 |
| EP1239404A2 (en) * | 2001-03-07 | 2002-09-11 | Sony Corporation | Fingerprint identification system fingerprint identification apparatus, fingerprint identification method, and biometric identification apparatus |
| JP2005293399A (ja) * | 2004-04-02 | 2005-10-20 | Matsushita Electric Ind Co Ltd | 個人認証方法と装置 |
| JP2007075305A (ja) * | 2005-09-14 | 2007-03-29 | Hitachi Ltd | 個人認証装置及び方法 |
| JP2009009434A (ja) * | 2007-06-29 | 2009-01-15 | Hitachi Omron Terminal Solutions Corp | 生体認証処理システム |
| EP2237226A1 (en) * | 2007-12-26 | 2010-10-06 | NEC Corporation | Inter-pattern feature corresponding device, inter-pattern feature corresponding method used for the same, and program therefor |
| US20090185746A1 (en) * | 2008-01-22 | 2009-07-23 | The University Of Western Australia | Image recognition |
| JP2012098974A (ja) * | 2010-11-04 | 2012-05-24 | Hitachi Ltd | 生体認証装置および方法 |
Non-Patent Citations (1)
| Title |
|---|
| 小牧優士 外3名: "濃度こう配特徴を用いた顔画像の照合と認識", 電子情報通信学会技術研究報告 VOL.109 NO.471 HIP2009−118−HIP2009−, vol. 第109巻 第471号, JPN6015001492, 8 March 2010 (2010-03-08), JP, pages 67 - 72, ISSN: 0002988724 * |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101853218B1 (ko) | 2013-09-16 | 2018-04-27 | 아이베리파이 인크. | 생체인식 템플릿 보안 및 키 생성 |
| JP2016538661A (ja) * | 2013-09-16 | 2016-12-08 | アイベリファイ インコーポレイテッド | バイオメトリックテンプレートセキュリティおよびキー生成 |
| KR101967124B1 (ko) | 2013-09-16 | 2019-04-08 | 아이베리파이 인크. | 생체인식 템플릿 보안 및 키 생성 |
| KR20180045054A (ko) * | 2013-09-16 | 2018-05-03 | 아이베리파이 인크. | 생체인식 템플릿 보안 및 키 생성 |
| JP2015094827A (ja) * | 2013-11-11 | 2015-05-18 | ソニー株式会社 | 画像処理装置及び画像処理方法 |
| JP6069581B2 (ja) * | 2014-03-25 | 2017-02-01 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| JPWO2015145589A1 (ja) * | 2014-03-25 | 2017-04-13 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| JPWO2015145590A1 (ja) * | 2014-03-25 | 2017-04-13 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| JPWO2015145591A1 (ja) * | 2014-03-25 | 2017-04-13 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| JPWO2015145588A1 (ja) * | 2014-03-25 | 2017-04-13 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| JP6069582B2 (ja) * | 2014-03-25 | 2017-02-01 | 富士通フロンテック株式会社 | 生体認証装置、生体認証方法、及びプログラム |
| WO2017038695A1 (ja) * | 2015-08-28 | 2017-03-09 | 日本電気株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JPWO2017038695A1 (ja) * | 2015-08-28 | 2018-08-16 | 日本電気株式会社 | 画像処理装置、画像処理方法及びプログラム |
| WO2018198500A1 (ja) * | 2017-04-27 | 2018-11-01 | 富士通株式会社 | 照合装置、照合方法および照合プログラム |
| US11315341B2 (en) | 2017-04-27 | 2022-04-26 | Fujitsu Limited | Information processing apparatus, verification method, and computer-readable recording medium recording verification program |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20220165087A1 (en) | Systems and methods for performing fingerprint based user authentication using imagery captured using mobile devices | |
| JP2012256272A (ja) | 生体識別装置、及び、生体識別方法 | |
| CN110326001B (zh) | 使用利用移动设备捕捉的图像执行基于指纹的用户认证的系统和方法 | |
| US9361507B1 (en) | Systems and methods for performing fingerprint based user authentication using imagery captured using mobile devices | |
| US6813010B2 (en) | Personal identification system | |
| US7769209B2 (en) | Biometric authentication method and biometric authentication apparatus | |
| JP2002083298A (ja) | 個人認証装置及び方法 | |
| JP5403147B2 (ja) | 生体認証装置及び生体認証方法 | |
| EP2068270B1 (en) | Authentication apparatus and authentication method | |
| Choras | Multimodal biometrics for person authentication | |
| Estacio et al. | A rotation invariant algorithm for bimodal hand vein recognition system | |
| JP2012248047A (ja) | 生体識別装置、及び、生体識別方法 | |
| Sanchez-Avila et al. | Multiscale analysis for iris biometrics | |
| Mane et al. | Novel multiple impression based multimodal fingerprint recognition system | |
| Sanches et al. | A single sensor hand biometric multimodal system | |
| JP5914995B2 (ja) | 生体識別装置、及び、生体識別方法 | |
| JP5729029B2 (ja) | 識別装置及び識別方法 | |
| JP2007179267A (ja) | パターン照合装置 | |
| CN115668311A (zh) | 认证方法、认证程序以及信息处理装置 | |
| Wieclaw | Fingerprint Orientation Field Enhancement | |
| JP2012221110A (ja) | 生体識別装置、及び、生体識別方法 | |
| WO2023242899A1 (ja) | 類似度算出方法、類似度算出プログラム、および類似度算出装置 | |
| Arulalan et al. | Score level fusion of iris and Finger knuckle print | |
| Prommegger et al. | Longitudinal Finger Rotation in Vein Recognition Deformation Detection and Correction | |
| JP2009245231A (ja) | 指の屈伸運動計測を利用した個人認証方法及び個人認証システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140527 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140527 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141219 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150127 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20150325 |