JP2012242190A - Reference signal generation device and reference signal generating method - Google Patents
Reference signal generation device and reference signal generating method Download PDFInfo
- Publication number
- JP2012242190A JP2012242190A JP2011110976A JP2011110976A JP2012242190A JP 2012242190 A JP2012242190 A JP 2012242190A JP 2011110976 A JP2011110976 A JP 2011110976A JP 2011110976 A JP2011110976 A JP 2011110976A JP 2012242190 A JP2012242190 A JP 2012242190A
- Authority
- JP
- Japan
- Prior art keywords
- time
- reference signal
- gps
- radio wave
- standard radio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Landscapes
- Electric Clocks (AREA)
- Electromechanical Clocks (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
本発明は基準信号発生装置及び基準信号発生方法に関する。 The present invention relates to a reference signal generator and a reference signal generation method.
誤差の少ない高精度な基準信号が求められている。基準信号の生成には、水晶発振器を使用することが多いが、水晶発振器の出力は、最も精度が高いものでも1×10−10程度の周波数安定度(つまり、1010Hzあたり+−1Hzの周波数偏差)であるため、このままでは、FM放送の送受信など、高精度な基準信号が必要とされる場面では使用できない。 There is a need for a highly accurate reference signal with little error. In order to generate the reference signal, a crystal oscillator is often used, but the output of the crystal oscillator has a frequency stability of about 1 × 10 −10 (that is, + −1 Hz per 10 10 Hz) even at the highest accuracy. Therefore, it cannot be used in a scene where a highly accurate reference signal is required, such as transmission / reception of FM broadcasting.
そこで、高精度な基準信号が必要とされる場面では、一般に、水晶発振器の出力をより高精度な入力信号に同期させる、いわゆるPLL(Phase Locked Loop:位相同期回路)が使用される。例えば、特許文献1には、GPS(Global Positioning System)受信機と標準電波受信機とが1秒毎に出力する高精度な1秒信号に発振器の出力を同期させる標準電波受装置が開示されている。
Therefore, in a situation where a highly accurate reference signal is required, a so-called PLL (Phase Locked Loop) that synchronizes the output of the crystal oscillator with a more accurate input signal is generally used. For example,
GPS受信機は、GPS衛星から受信するGPS信号を基に1秒信号を生成しているため、GPS衛星から電波を受信できないときは、1秒信号を出力できない(以下、この状態を「ホールドオーバー」という)。 Since the GPS receiver generates a 1-second signal based on the GPS signal received from the GPS satellite, it cannot output a 1-second signal when radio waves cannot be received from the GPS satellite (hereinafter, this state is referred to as “holdover”). ").
特許文献1の装置は、GPS衛星から電波を受信できないときは、標準電波受信機の1秒信号に基準信号を同期させているので、ホールドオーバーが発生しても、基準信号の精度が極端に低下することはない。しかしながら、ホールドオーバーが発生すると、同期させる信号がGPS受信機の1秒信号から標準電波受信機の1秒信号に切り替わるため、ホールドオーバー発生前後で、基準信号の連続性が低下するという問題がある。
The apparatus of
本発明はこのような問題に鑑みてなされたものであり、基準信号の連続性を高めることができる基準信号発生装置及び基準信号発生方法を提供することを目的とする。 The present invention has been made in view of such problems, and an object of the present invention is to provide a reference signal generating apparatus and a reference signal generating method capable of improving the continuity of a reference signal.
上記目的を達成するため、本発明の第1の観点にかかる基準信号発生装置は、
GPS信号を基にGPS受信時刻を取得するGPS受信時刻取得手段と、
標準電波を基に標準電波受信時刻を取得する標準電波受信時刻取得手段と、
GPS受信時刻と標準電波受信時刻との時間差を、受信した月、日、または、時刻と関連づけた時間差情報を記憶する記憶手段と、
現在の月、日、または、時刻に対応する時刻差を前記時間差情報から取得し、取得した時間差に基づいて標準電波時刻を補正する補正手段と、
基準信号を出力する発振器を有し、GPS受信障害が発生していない場合は前記GPS信号を基に生成される入力信号に基準信号を同期させ、GPS受信障害が発生している場合は補正した標準電波受信時刻を基に生成される入力信号に基準信号を同期させる位相同期手段と、を備え、
前記位相同期手段は、GPS受信障害から復旧した際に、前記GPS信号を基に生成される入力信号と前記基準信号との位相差を、複数パルスに分割して徐々に短縮する、
ことを特徴とする。
In order to achieve the above object, a reference signal generator according to a first aspect of the present invention includes:
GPS reception time acquisition means for acquiring GPS reception time based on the GPS signal;
Standard radio wave reception time acquisition means for acquiring the standard radio wave reception time based on the standard radio wave,
Storage means for storing time difference information associated with the time difference between the GPS reception time and the standard radio wave reception time with the received month, day, or time;
Correction means for acquiring a time difference corresponding to the current month, day, or time from the time difference information, and correcting the standard radio wave time based on the acquired time difference;
It has an oscillator that outputs a reference signal, and when no GPS reception failure has occurred, the reference signal is synchronized with an input signal generated based on the GPS signal, and corrected when a GPS reception failure has occurred Phase synchronization means for synchronizing the reference signal to the input signal generated based on the standard radio wave reception time,
The phase synchronization means divides the phase difference between the input signal generated based on the GPS signal and the reference signal into a plurality of pulses and gradually shortens when the GPS reception failure is recovered,
It is characterized by that.
上記目的を達成するため、本発明の第2の観点にかかる基準信号発生方法は、
GPS信号を基にGPS受信時刻を取得するGPS受信時刻取得ステップと、
標準電波を基に標準電波受信時刻を取得する標準電波受信時刻取得ステップと、
GPS受信時刻と標準電波受信時刻との時間差を、受信した月、日、または、時刻と関連づけた時間差情報を記憶する記憶ステップと、
現在の月、日、または、時刻に対応する時刻差を前記時間差情報から取得し、取得した時間差に基づいて標準電波時刻を補正する補正ステップと、
GPS受信障害が発生していない場合は前記GPS信号を基に生成される入力信号に、発振器の出力する基準信号を同期させ、GPS受信障害が発生している場合は補正した標準電波受信時刻を基に生成される入力信号に発振器の出力する基準信号を同期させ、さらに、GPS受信障害から復旧した際は、前記GPS信号を基に生成される入力信号と前記基準信号との位相差を、複数パルスに分割して徐々に短縮する位相同期ステップと、を備える、
ことを特徴とする。
In order to achieve the above object, a reference signal generation method according to a second aspect of the present invention includes:
A GPS reception time acquisition step of acquiring a GPS reception time based on the GPS signal;
A standard radio wave reception time acquisition step for acquiring a standard radio wave reception time based on the standard radio wave;
Storing a time difference between the GPS reception time and the standard radio wave reception time, the time difference information associated with the received month, day, or time;
A correction step of acquiring a time difference corresponding to the current month, day, or time from the time difference information and correcting the standard radio wave time based on the acquired time difference;
When a GPS reception failure has not occurred, the reference signal output from the oscillator is synchronized with the input signal generated based on the GPS signal, and when a GPS reception failure has occurred, the corrected standard radio wave reception time is set. The reference signal output from the oscillator is synchronized with the input signal generated based on the reference signal, and further, when the GPS reception failure is recovered, the phase difference between the input signal generated based on the GPS signal and the reference signal is A phase synchronization step that divides into multiple pulses and gradually shortens,
It is characterized by that.
基準信号の連続性を高めることができる基準信号発生装置及び基準信号発生方法を提供できる。 It is possible to provide a reference signal generation device and a reference signal generation method capable of improving the continuity of the reference signal.
本発明の実施形態の基準信号発生装置について、図面を参照しながら説明する。基準信号発生装置100は10MHzの基準信号を生成するための装置であり、図1に示すように、標準電波受信機110と、GPS受信機120と、時刻情報コンパレータ130と、記憶部140と、PLL150とから構成される。
A reference signal generator according to an embodiment of the present invention will be described with reference to the drawings. The
標準電波受信機110は、例えば、情報通信研究機構が運用する標準周波数報時局から送信される標準電波を受信する受信機等から構成される。標準電波受信機110は、標準電波を受信すると、標準電波に含まれる標準電波受信時刻を取得して、逐次、時刻情報コンパレータ130に出力する。なお、以下の説明では、「標準電波受信時刻」は、1分毎に標準電波受信機110から出力されるものとする。
The standard
GPS受信機120は、GPS衛星から送信されるGPS信号を受信する受信機等から構成される。GPS受信機120は、GPS信号を受信すると、GPS信号からGPS受信時刻および1pps(Pulse Per Second)信号を取得して、逐次、時刻情報コンパレータ130および位相比較器151に出力する。ここで「GPS受信時刻」とは、GPS衛星に搭載されている原子時計が生成する極めて精度の高い時刻情報のことをいう。また、「1pps信号」とは、GPS信号を基に生成される、GPS受信時刻に同期した1秒毎の信号のことをいう。GPS受信時刻は時刻情報コンパレータ130に出力され、1pps信号は位相比較器151に出力される。なお、GPS受信機120は、GPS受信障害が発生してGPS信号が受信できないときは、GPS受信時刻及び1pps信号の出力を停止する(以下、この状態を「ホールドオーバー」という)。
The
時刻情報コンパレータ130は、標準電波受信時刻とGPS受信時刻とを比較するためのアナログ/デジタルプロセッサ等から構成される。時刻情報コンパレータ130は、標準電波受信時刻(tS)とGPS受信時刻(tG)との時刻差ΔT(図2に示す“ΔT1”および“ΔT2”)を現在の日時と関連付けて時刻差データベース141に格納する。また、時刻情報コンパレータ130は、時刻差データベース141に格納されている情報を基に、標準電波受信時刻を補正し、さらに、補正した標準電波受信時刻を基に擬似1pps信号を生成し、位相比較器151に出力する。ここで「擬似1pps信号」とは、1分毎に出力される標準電波受信時刻を、例えば、内蔵の水晶発振子(不図示)等を使って1秒毎の信号に分割することで生成される、擬似的な1pps信号のことをいう。
The
記憶部140は、ハードディスク等の記憶装置から構成され、時刻差データベース141や設定パラメータ142等の各種データを記憶する。
The
時刻差データベース141は、時刻情報コンパレータ130が算出した時刻差と、算出した日時を関連づけて記憶するデータベースである。時刻差データベース141には、標準電波受信時刻とGPS受信時刻との時間差を1分毎に現在の日時と関連付けて記憶した「経時変化特性情報」と、標準電波受信時刻とGPS受信時刻との時間差の1日の平均値をその日付と関連付けて記憶した「経日変化特性情報」と、GPS受信時刻との時間差の1ヶ月の平均値をその月と関連付けて記憶した「経年変化特性情報」と、が格納されている(「経時変化特性情報」、「経日変化特性情報」、「経日変化特性情報」については後述する)。
The
設定パラメータ142は、GPS受信障害が復旧してから基準信号が入力信号に同期するまでに要する「時刻同期時間」の大小を指定するための値であり、基準信号発生装置100の製造段階で、予めメーカー等によって保存されている。
The
ここで「時刻同期時間」とは、GPS受信障害が発生してからGPS受信障害から復旧するまでに要する時間(以下、「ホールドオーバー時間」という)と、設定パラメータ142と、を基に算出される値のことである。例えば、ホールドオーバー時間がTh、設定パラメータ142の値がmであるとすれば、時刻同期時間はThをmで割ったTh/mである。この場合、基準信号は、mが大きいほど入力信号にすばやく同期し、mが小さいほどゆっくり入力信号に同期する(即ち、mが大きいほど基準信号の連続性が低くなり、mが小さいほど基準信号の連続性が高くなる)。
Here, the “time synchronization time” is calculated based on the time required for recovery from the GPS reception failure after the GPS reception failure (hereinafter referred to as “holdover time”) and the
また、設定パラメータ142は、所定の上限値aの範囲内で定められた正の整数値(すなわち1〜aの値)である。上限値aは、GPS受信障害復旧直後の基準信号の周波数安定度が、基準信号を使用する外部装置の許容する周波数安定度を満たすように定められた値である。より具体的には、ホールドオーバー発生時の基準信号の周波数安定度は、基準信号発生装置100が標準電波を使用していることから、最悪でも、標準電波の周波数安定度を維持している。そこで、ホールドオーバー発生時に、基準信号が、標準電波受信時刻の周波数安定度の上限値ぎりぎりいっぱいでGPS受信時刻とずれていった場合でも、GPS受信障害復旧後、基準信号が外部装置の許容する周波数安定度を満たすように滑らかに変化する限界値が上限値aである。例えば、標準電波の周波数安定度1×10−11であり、外部装置の許容する周波数安定度が50×10−9であるとすれば、上限値aは、50×10−9を1×10−11で割った5000である。この場合、設定パラメータ142は、1〜a=1〜5000の範囲の値である。
The setting
PLL150は、出力信号(図1に示す「基準信号」)の位相を入力信号(図1に示す「1pps信号」および「擬似1pps信号」)に同期させて、出力信号の精度を入力信号の精度にまで高めるための回路であり、位相比較器151と、ループフィルタ152と、VCO(Voltage Controlled Oscillator)153と、分周回路154とから構成される。
The
位相比較器151は、プロセッサやタイムインターバルカウンタ等から構成され、GPS受信機120もしくは時刻情報コンパレータ130からの「入力信号」と、分周回路154からの「1Hz信号」とを比較して、それら信号の位相差を「位相差信号」としてループフィルタ152に出力する。ここで「1Hz信号」とは、10MHzの基準信号を分周して生成される1秒毎(つまり1Hz)の信号のことをいう。なお、位相比較器151は、ホールドオーバーが発生していないときは、1pps信号と1Hz信号とを比較して位相差信号を生成し、ホールドオーバーが発生しているときは、擬似1pps信号と1Hz信号とを比較して位相差信号を生成する。また、位相比較器151は内部にタイマ(不図示)を有していて、ホールドオーバーが発生してから回復するまでの時刻を計時する。
The
ループフィルタ152は、ローパスフィルタ等から構成され、位相差信号から不要な短周期の信号を取り除いて交流成分の少ないきれいな直流信号に変換する。変換した信号は、VCO153を制御するための「制御信号」として、VCO153に出力される。
The
VCO153は、水晶発振子等を内蔵する電圧制御発振器から構成される。VCO153は、入力電圧の大小によって発信周波数を制御できるようになっていて、ループフィルタ152から入力される制御信号に基づいて10MHzの基準信号を生成する。
The
分周回路154は、フリップフロップ等から構成され、10MHzの基準信号を分周して、基準信号に同期した1Hz信号を生成する。生成した1Hz信号は、位相比較器151に出力される。
The
次に、このような構成を有する基準信号発生装置100の動作について説明する。最初にGPS受信障害が発生していない場合の動作について説明する。
Next, the operation of the
GPS受信機120は、GPS衛星からGPS信号を受信すると、GPS信号の中からGPS受信時刻を取り出して時刻情報コンパレータ130に送信する。また、GPS受信機120は、GPS信号を基に1pps信号を生成し、位相比較器151に出力する。
When receiving a GPS signal from a GPS satellite, the
位相比較器151は、1pps信号を受信すると、1pps信号と分周回路154からの1Hz信号との位相差から「位相差信号」を生成し、ループフィルタ152に出力する。
When the
ループフィルタ152は、位相差信号を受信すると、位相差信号から不要な短周期の信号を取り除いて「制御信号」を生成し、VCO153に出力する。
When the
VCO153は、ループフィルタ152から制御信号を受信すると、その信号に基づいて、内蔵の水晶発振子の出力周波数を上下させて10MHzの基準信号を生成し、外部の装置へ出力する。
When the
分周回路154は、VCO153が生成した基準信号を分周して1Hz信号を生成し、位相比較器151にフィードバックする。位相比較器151は、再び、1Hz信号と1pps信号とを比較する。
The
PLL150(位相比較器151、ループフィルタ152、VCO153、分周回路154)は、これらの動作を繰り返し、精度の高い10MHzの基準信号を生成し続ける。
The PLL 150 (the
また、標準電波受信機110は、標準周波数報時局から送信される標準電波を受信すると、標準電波の中から標準電波受信時刻を取り出して時刻情報コンパレータ130に送信する。
When the standard
時刻情報コンパレータ130は、標準電波受信機110から標準電波受信時刻tSを受け取ると、GPS受信機120から受け取ったGPS受信時刻tGと比較して、これらの時刻差ΔTを算出する。そして、算出した時刻差ΔTを現在の日時と関連づけて時刻差データベース141に格納する。
When receiving the standard radio wave reception time tS from the standard
具体的には、時刻情報コンパレータ130は、図2に示すように、標準電波受信時刻tSとGPS受信時刻tGとの時刻差ΔTを毎分1回ずつ算出する。そして、時刻情報コンパレータ130は、その時刻差ΔTを現在の月、日、時、分と関連づけて「経時変化特性情報」として時刻差データベース141に格納する。この経時変化特性情報を、縦軸を時刻差ΔT、横軸を時間tとして表にプロットすると、例えば、図3のようになる。なお、時刻情報コンパレータ130は、直近1年間分の時刻差ΔTを時刻差データベース141に格納するものとする。1年を経過した時刻差ΔTは、随時、削除する。
Specifically, as shown in FIG. 2, the
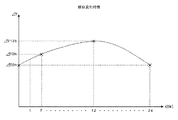
また、時刻情報コンパレータ130は、1時間分の時刻差ΔT、即ち、連続して60個の時刻差ΔTを時刻差データベース141に格納すると、この60個の時刻差ΔTの平均値ΔThを算出し、その平均値ΔThを現在の月、日、時と関連づけて「経時変化特性情報」として時刻差データベース141に格納する。この経日変化特性情報を、縦軸を時間平均ΔTh、横軸を時間として表にプロットすると、例えば、図4のようになる。なお、時刻情報コンパレータ130は、直近1年間分の時間平均ΔThを時刻差データベース141に格納するものとする。1年を経過した時間平均ΔThは随時削除する。
In addition, when the
また、時刻情報コンパレータ130は、1日分の時間平均ΔTh、即ち、連続して24個の時間平均ΔThを時刻差データベース141に格納すると、この24個のΔThの平均値ΔTdを算出し、その平均値ΔTdを現在の月、日、時と関連づけて「経年変化特性情報」として時刻差データベース141に格納する。この経年変化特性情報を表にプロットすると、例えば、図5のようになる。なお、時刻情報コンパレータ130は、直近1年間分の日平均ΔThを時刻差データベース141に格納するものとする。1年を経過した時間平均ΔThは随時削除する。
Further, when the
また、時刻情報コンパレータ130は、現在の日時に対応する情報、即ち、前年の同月、同日、同時刻の時刻差ΔT、時間平均ΔTh、日平均ΔTdを、時刻差データベース141から取得し、これらの値を基に、下記(式1)を満たす補正量ΔTcを算出する。ここで、A1、A2、A3はそれぞれ予め定められた定数である。
ΔTc=(A1ΔT+A2ΔTh+A3ΔTd)/3・・・・・・・・・(式1)
Further, the
ΔTc = (A1ΔT + A2ΔTh + A3ΔTd) / 3 (Equation 1)
さらに、時刻情報コンパレータ130は、下記(式2)を満たす擬似GPS受信時刻を生成する。ここで、tPは擬似GPS受信時刻の生成時刻であり、tSは標準電波時刻の受信時刻である。
tP=tS−ΔTc・・・・・・・・・・・・・・・・・・・・・・・・(式2)
Furthermore, the
tP = tS−ΔTc (2)
標準電波受信時刻が1分毎に出力されることから、擬似GPS受信時刻も1分毎に出力される。そこで、時刻情報コンパレータ130は、擬似GPS受信時刻を1秒毎の信号に分割して擬似1pps信号を生成する。時刻情報コンパレータ130は、生成した擬似1pps信号を位相比較器151に出力する。
Since the standard radio wave reception time is output every minute, the pseudo GPS reception time is also output every minute. Therefore, the
次にGPS受信障害が発生した場合の動作について説明する。 Next, the operation when a GPS reception failure occurs will be described.
GPS受信機120は、GPS衛星からGPS信号を受信できなくなると、GPS受信時刻および1pps信号の出力を停止する。
When the
位相比較器151は、GPS受信機120から1pps信号を受信できなくなると、ホールドオーバーが発生している間の時間を計測するため、内部タイマのカウントを開始するとともに、位相比較のための入力信号を1pps信号から擬似1pps信号に切り替える。そして、擬似1pps信号と1Hz信号との位相差を「位相差信号」としてループフィルタ152に出力する。その他の動作は、GPS受信障害が発生していない場合の動作と同じであるので説明を省略する。
When the
最後に、GPS受信機120がGPS受信障害から復旧した場合の動作について説明する。
Finally, the operation when the
GPS受信機120は、GPS衛星からGPS信号を受信できる状態になると、GPS受信時刻および1pps信号の出力を再開する。
When the
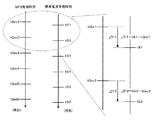
位相比較器151は、GPS受信機120から1pps信号を受信すると、即座に内部タイマのカウントを停止し、そのタイマ値をホールドオーバー時間Th(図6に示す“ホールドオーバー時間”)として取得する。そして、位相比較器151は、ホールドオーバー時間Thと設定パラメータ142の値mとを基に、下記(式3)を満たす時刻同期時間Ty(図6に示す“時刻同期時間”)を算出する。なお、mは1〜aの正の整数値である。
Ty=Th/m・・・・・・・・・・・・・・・・・・・・・・・・・・(式3)
When the
Ty = Th / m (3)
位相比較器151は、基準信号が1pps信号に同期するまでの、1pps信号のパルス数nを算出する(例えば、時刻同期時間Tyを1pps信号のパルス間隔1秒で割って算出する)。さらに、位相比較器151は、基準信号に同期する1Hz信号と1pps信号との位相差(図6に示すΔTd)を、例えば、内蔵のタイムインターバルカウンタ(不図示)等を使用して取得する。そして、その位相差ΔTdとパルス数nを基に、下記(式4)を満たす補正量(図7に示すΔTe:1pps信号1パルスあたりに基準信号を補正する補正量)を取得する。
ΔTe=ΔdT/n・・・・・・・・・・・・・・・・・・・・・・・・(式4)
The
ΔTe = ΔdT / n (4)
位相比較器151は、図7に示すように、1pps信号にΔTdを加えた/減じた信号から、1パルス毎にΔTeを減じた/加算した信号に基準信号を同期させることで、時刻同期時間Tyをかけて(つまり、nパルスをかけて)、基準信号を徐々に1pps信号に同期させる。
As shown in FIG. 7, the
本実施形態によれば、昨年1年間におけるGPS受信時刻と標準電波受信時刻の間の経時偏差(即ち、基準信号発生装置100を設置した場所での昨年1年間における季節的な傾向、昼夜の傾向等)に基づいて標準電波受信時刻を補正しているので、時刻情報コンパレータ130は、GPS受信機120からGPS受信時刻が取得できない場合であっても、GPS受信時刻に極めて近い「擬似GPS受信時刻」を得ることができる。その結果、時刻情報コンパレータ130は、「1pps信号」に極めて近い「擬似1pps信号」を生成できるので、基準信号発生装置100は、ホールドオーバーが発生しても、擬似1pps信号を使って、高い連続性を持った基準信号を生成することができる。
According to the present embodiment, the time-dependent deviation between the GPS reception time and the standard radio wave reception time in the last year (that is, the seasonal trend in the last year at the place where the
また、疑似GPS受信時刻は標準電波受信時刻を基に生成したものなので、ホールドオーバー発生中に基準信号発生装置100が生成する基準信号の周波数安定度を、最悪でも、標準電波の周波数安定度と同程度にすることができる。しかも、標準電波受信時刻を昨年1年間の経時偏差に基づいて補正しているので、基準信号発生装置100は、ホールドオーバーが発生しても、標準電波の周波数安定度よりもさらに高い周波数安定度の基準信号を生成できる。
In addition, since the pseudo GPS reception time is generated based on the standard radio wave reception time, the frequency stability of the reference signal generated by the
また、基準信号発生装置100は、GPS受信障害から復旧した場合に、基準信号と1pps信号との位相差を、時刻同期時間をかけて徐々に短縮しているので、GPS受信障害復旧後の基準信号の連続性を高めることができる。
Moreover, since the
また、基準信号発生装置100は、時刻同期時間の長短を決定するための設定パラメータ142を記憶しているので、外部装置の許容する周波数安定度に合わせて、設定パラメータ142の値を変更することによって、容易に時刻同期時間の長短を調整することができる。
Further, since the
なお、時刻情報コンパレータ130は、1分毎にGPS受信時刻と標準電波受信時刻を比較して時刻差ΔTを算出したが、標準電波受信機110からより短い間隔で標準電波受信時刻を出力できるようにして、より短い時間間隔で時刻差ΔTを算出してもよい。また、時刻情報コンパレータ130は、より長い時間間隔で時刻差ΔTを算出してもよい。
The
また、本実施形態では、時刻差データベース141に1年間の日平均ΔTd、時間平均ΔTh及び時刻差ΔTを格納し、日平均ΔTd、時間平均ΔThを算出することなく、時刻差ΔTとその算出日時とを関連づけて時刻差データベースに格納してもよい。この場合、時刻情報コンパレータ130は、現在の日付及び時刻に対応する時刻差ΔTを時刻差データベースから取得し、取得した時刻差ΔTにて標準電波受信時刻を補正してもよい。
Further, in this embodiment, the daily average ΔTd, time average ΔTh, and time difference ΔT for one year are stored in the
また、時刻差データベース141に複数年分の日平均ΔTd、時間平均ΔTh及び時刻差ΔTを格納してもよい。この場合、時刻情報コンパレータ130は、現在時刻に対応する複数年分の日平均ΔTd、時間平均ΔTh及び時刻差ΔTを基に、補正量ΔTcを算出してもよい。
The
また、基準信号発生装置100の設置場所に予め設置された別の機器にて時刻差データベース141を生成し、その時刻差データベース141を基準信号発生装置100の設置の際に記憶部140に格納してもよい。基準信号発生装置100は、設置直後からその設置場所におけるGPS受信時刻と標準電波受信時刻の経時変化に基づいて、疑似GPS受信時刻を生成することができる。
Further, the
また、時刻差データベース141や設定パラメータ142を外部から格納できるようにするため、USBポート等の外部インタフェースを備えていてもよい。
Further, an external interface such as a USB port may be provided so that the
また、PLL150は、位相比較器151や分周回路154等をデジタルプロセッサ等で構成するデジタルPLLであってもよいし、位相比較器151や分周回路154等をアナログ回路で構成するアナログPLLであってもよい。
The
また、VCO153は、OCVCXO(oven−controlled voltage−controlled crystal oscillator:恒温槽付電圧制御水晶発振器)やTCVCXO(temperature−compensated voltage-controlled crystal oscillator:温度補償型電圧制御水晶発振器)等の電圧制御水晶発振器であってもよい。
Further, the
上記の実施形態の一部又は全部は、以下の付記のようにも記載され得るが、以下には限られない。 A part or all of the above embodiments can be described as in the following supplementary notes, but is not limited thereto.
(付記1)
GPS信号を基にGPS受信時刻を取得するGPS受信時刻取得手段と、
標準電波を基に標準電波受信時刻を取得する標準電波受信時刻取得手段と、
GPS受信時刻と標準電波受信時刻との時間差を、受信した月、日、または、時刻と関連づけた時間差情報を記憶する記憶手段と、
現在の月、日、または、時刻に対応する時刻差を前記時間差情報から取得し、取得した時間差に基づいて標準電波時刻を補正する補正手段と、
基準信号を出力する発振器を有し、GPS受信障害が発生していない場合は前記GPS信号を基に生成される入力信号に基準信号を同期させ、GPS受信障害が発生している場合は補正した標準電波受信時刻を基に生成される入力信号に基準信号を同期させる位相同期手段と、を備え、
前記位相同期手段は、GPS受信障害から復旧した際に、前記GPS信号を基に生成される入力信号と前記基準信号との位相差を、複数パルスに分割して徐々に短縮する、
ことを特徴とする基準信号発生装置。
(Appendix 1)
GPS reception time acquisition means for acquiring GPS reception time based on the GPS signal;
Standard radio wave reception time acquisition means for acquiring the standard radio wave reception time based on the standard radio wave,
Storage means for storing time difference information associated with the time difference between the GPS reception time and the standard radio wave reception time with the received month, day, or time;
Correction means for acquiring a time difference corresponding to the current month, day, or time from the time difference information, and correcting the standard radio wave time based on the acquired time difference;
It has an oscillator that outputs a reference signal, and when no GPS reception failure has occurred, the reference signal is synchronized with an input signal generated based on the GPS signal, and corrected when a GPS reception failure has occurred Phase synchronization means for synchronizing the reference signal to the input signal generated based on the standard radio wave reception time,
The phase synchronization means divides the phase difference between the input signal generated based on the GPS signal and the reference signal into a plurality of pulses and gradually shortens when the GPS reception failure is recovered,
A reference signal generator.
(付記2)
GPS受信障害が発生してからGPS受信障害から復旧するまでの受信障害時間を計測する計測手段、を備え、
前記位相同期手段は、
前記受信障害時間を基に、GPS受信障害が復旧してから基準信号が入力信号に同期するまでの同期時間を算出する算出手段、を備え、
GPS受信障害から復旧した際に、前記同期時間をかけて、前記基準信号と入力信号との位相差を徐々に短縮する、
ことを特徴とする付記1に記載の基準信号発生装置。
(Appendix 2)
Measuring means for measuring a reception failure time from the occurrence of a GPS reception failure until recovery from the GPS reception failure,
The phase synchronization means includes
Based on the reception failure time, comprising a calculation means for calculating a synchronization time from the recovery of the GPS reception failure until the reference signal is synchronized with the input signal,
When recovering from a GPS reception failure, gradually reduce the phase difference between the reference signal and the input signal over the synchronization time,
The reference signal generator according to
(付記3)
GPS受信障害が復旧してから基準信号が入力信号に同期するまでの時間の大小を示す設定値を記憶する設定値記憶手段、を備え、
前記算出手段は、前記受信障害時間を前記設定値で割ることによって前記同期時間を算出する、
ことを特徴とする付記2に記載の基準信号発生装置。
(Appendix 3)
Setting value storage means for storing a setting value indicating the amount of time from when the GPS reception failure is recovered until the reference signal is synchronized with the input signal;
The calculating means calculates the synchronization time by dividing the reception failure time by the set value;
The reference signal generator according to
(付記4)
前記設定値は、上限値を有する値であり、
前記上限値は、前記標準電波の周波数安定度と、前記基準信号を使用する外部装置の許容する周波数安定度と、を基に算出される値である、
ことを特徴とする付記3に記載の基準信号発生装置。
(Appendix 4)
The set value is a value having an upper limit value,
The upper limit value is a value calculated based on the frequency stability of the standard radio wave and the frequency stability allowed by an external device using the reference signal.
The reference signal generating device according to
(付記5)
GPS信号を基にGPS受信時刻を取得するGPS受信時刻取得ステップと、
標準電波を基に標準電波受信時刻を取得する標準電波受信時刻取得ステップと、
GPS受信時刻と標準電波受信時刻との時間差を、受信した月、日、または、時刻と関連づけた時間差情報を記憶する記憶ステップと、
現在の月、日、または、時刻に対応する時刻差を前記時間差情報から取得し、取得した時間差に基づいて標準電波時刻を補正する補正ステップと、
GPS受信障害が発生していない場合は前記GPS信号を基に生成される入力信号に、発振器の出力する基準信号を同期させ、GPS受信障害が発生している場合は補正した標準電波受信時刻を基に生成される入力信号に発振器の出力する基準信号を同期させ、さらに、GPS受信障害から復旧した際は、前記GPS信号を基に生成される入力信号と前記基準信号との位相差を、複数パルスに分割して徐々に短縮する位相同期ステップと、を備える、
ことを特徴とする基準信号発生方法。
(Appendix 5)
A GPS reception time acquisition step of acquiring a GPS reception time based on the GPS signal;
A standard radio wave reception time acquisition step for acquiring a standard radio wave reception time based on the standard radio wave;
Storing a time difference between the GPS reception time and the standard radio wave reception time, the time difference information associated with the received month, day, or time;
A correction step of acquiring a time difference corresponding to the current month, day, or time from the time difference information and correcting the standard radio wave time based on the acquired time difference;
When a GPS reception failure has not occurred, the reference signal output from the oscillator is synchronized with the input signal generated based on the GPS signal, and when a GPS reception failure has occurred, the corrected standard radio wave reception time is set. The reference signal output from the oscillator is synchronized with the input signal generated based on the reference signal, and further, when the GPS reception failure is recovered, the phase difference between the input signal generated based on the GPS signal and the reference signal is A phase synchronization step that divides into multiple pulses and gradually shortens,
A method for generating a reference signal.
100 基準信号発生装置
110 標準電波受信機
120 GPS受信機
130 時刻情報コンパレータ
140 記憶部
141 時刻差データベース
142 設定パラメータ
150 PLL
151 位相比較器
152 ループフィルタ
153 VCO
154 分周回路
DESCRIPTION OF
151
154 Frequency divider
Claims (5)
標準電波を基に標準電波受信時刻を取得する標準電波受信時刻取得手段と、
GPS受信時刻と標準電波受信時刻との時間差を、受信した月、日、または、時刻と関連づけた時間差情報を記憶する記憶手段と、
現在の月、日、または、時刻に対応する時刻差を前記時間差情報から取得し、取得した時間差に基づいて標準電波時刻を補正する補正手段と、
基準信号を出力する発振器を有し、GPS受信障害が発生していない場合は前記GPS信号を基に生成される入力信号に基準信号を同期させ、GPS受信障害が発生している場合は補正した標準電波受信時刻を基に生成される入力信号に基準信号を同期させる位相同期手段と、を備え、
前記位相同期手段は、GPS受信障害から復旧した際に、前記GPS信号を基に生成される入力信号と前記基準信号との位相差を、複数パルスに分割して徐々に短縮する、
ことを特徴とする基準信号発生装置。 GPS reception time acquisition means for acquiring GPS reception time based on the GPS signal;
Standard radio wave reception time acquisition means for acquiring the standard radio wave reception time based on the standard radio wave,
Storage means for storing time difference information associated with the time difference between the GPS reception time and the standard radio wave reception time with the received month, day, or time;
Correction means for acquiring a time difference corresponding to the current month, day, or time from the time difference information, and correcting the standard radio wave time based on the acquired time difference;
It has an oscillator that outputs a reference signal, and when no GPS reception failure has occurred, the reference signal is synchronized with an input signal generated based on the GPS signal, and corrected when a GPS reception failure has occurred Phase synchronization means for synchronizing the reference signal to the input signal generated based on the standard radio wave reception time,
The phase synchronization means divides the phase difference between the input signal generated based on the GPS signal and the reference signal into a plurality of pulses and gradually shortens when the GPS reception failure is recovered,
A reference signal generator.
前記位相同期手段は、
前記受信障害時間を基に、GPS受信障害が復旧してから基準信号が入力信号に同期するまでの同期時間を算出する算出手段、を備え、
GPS受信障害から復旧した際に、前記同期時間をかけて、前記基準信号と入力信号との位相差を徐々に短縮する、
ことを特徴とする請求項1に記載の基準信号発生装置。 Measuring means for measuring a reception failure time from the occurrence of a GPS reception failure until recovery from the GPS reception failure,
The phase synchronization means includes
Based on the reception failure time, comprising a calculation means for calculating a synchronization time from the recovery of the GPS reception failure until the reference signal is synchronized with the input signal,
When recovering from a GPS reception failure, gradually reduce the phase difference between the reference signal and the input signal over the synchronization time,
The reference signal generator according to claim 1.
前記算出手段は、前記受信障害時間を前記設定値で割ることによって前記同期時間を算出する、
ことを特徴とする請求項2に記載の基準信号発生装置。 Setting value storage means for storing a setting value indicating the amount of time from when the GPS reception failure is recovered until the reference signal is synchronized with the input signal;
The calculating means calculates the synchronization time by dividing the reception failure time by the set value;
The reference signal generator according to claim 2.
前記上限値は、前記標準電波の周波数安定度と、前記基準信号を使用する外部装置の許容する周波数安定度と、を基に算出される値である、
ことを特徴とする請求項3に記載の基準信号発生装置。 The set value is a value having an upper limit value,
The upper limit value is a value calculated based on the frequency stability of the standard radio wave and the frequency stability allowed by an external device using the reference signal.
The reference signal generator according to claim 3.
標準電波を基に標準電波受信時刻を取得する標準電波受信時刻取得ステップと、
GPS受信時刻と標準電波受信時刻との時間差を、受信した月、日、または、時刻と関連づけた時間差情報を記憶する記憶ステップと、
現在の月、日、または、時刻に対応する時刻差を前記時間差情報から取得し、取得した時間差に基づいて標準電波時刻を補正する補正ステップと、
GPS受信障害が発生していない場合は前記GPS信号を基に生成される入力信号に、発振器の出力する基準信号を同期させ、GPS受信障害が発生している場合は補正した標準電波受信時刻を基に生成される入力信号に発振器の出力する基準信号を同期させ、さらに、GPS受信障害から復旧した際は、前記GPS信号を基に生成される入力信号と前記基準信号との位相差を、複数パルスに分割して徐々に短縮する位相同期ステップと、を備える、
ことを特徴とする基準信号発生方法。 A GPS reception time acquisition step of acquiring a GPS reception time based on the GPS signal;
A standard radio wave reception time acquisition step for acquiring a standard radio wave reception time based on the standard radio wave;
Storing a time difference between the GPS reception time and the standard radio wave reception time, the time difference information associated with the received month, day, or time;
A correction step of acquiring a time difference corresponding to the current month, day, or time from the time difference information and correcting the standard radio wave time based on the acquired time difference;
When a GPS reception failure has not occurred, the reference signal output from the oscillator is synchronized with the input signal generated based on the GPS signal, and when a GPS reception failure has occurred, the corrected standard radio wave reception time is set. The reference signal output from the oscillator is synchronized with the input signal generated based on the reference signal, and further, when the GPS reception failure is recovered, the phase difference between the input signal generated based on the GPS signal and the reference signal is A phase synchronization step that divides into multiple pulses and gradually shortens,
A method for generating a reference signal.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011110976A JP2012242190A (en) | 2011-05-18 | 2011-05-18 | Reference signal generation device and reference signal generating method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011110976A JP2012242190A (en) | 2011-05-18 | 2011-05-18 | Reference signal generation device and reference signal generating method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012242190A true JP2012242190A (en) | 2012-12-10 |
Family
ID=47464061
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011110976A Withdrawn JP2012242190A (en) | 2011-05-18 | 2011-05-18 | Reference signal generation device and reference signal generating method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012242190A (en) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103676633A (en) * | 2013-12-17 | 2014-03-26 | 天津七六四通信导航技术有限公司 | Time measurement method for satellite navigation receiver |
| CN104215803A (en) * | 2014-09-19 | 2014-12-17 | 国家电网公司 | Synchronous standard source and control method applied to distributive type intelligent testing platform |
| JP2017531955A (en) * | 2014-06-19 | 2017-10-26 | ケネス ハンKenneth Hann | Timing signal generation method and device |
| JP2017204832A (en) * | 2016-05-13 | 2017-11-16 | 大井電気株式会社 | Synchronous signal generation system, phase difference calculation device, and synchronous signal generation device |
| JP2020030808A (en) * | 2018-08-24 | 2020-02-27 | バイドゥ ユーエスエー エルエルシーBaidu USA LLC | Time source recovery system for autonomous driving vehicle |
| CN110928177A (en) * | 2019-11-14 | 2020-03-27 | 上海咏昕信息科技有限公司 | Clock synchronization system and method |
| US11206496B2 (en) | 2014-12-12 | 2021-12-21 | Gn Hearing A/S | Hearing device with service mode and related method |
| CN114513198A (en) * | 2022-02-16 | 2022-05-17 | 中国电子科技集团公司第五十四研究所 | 1pps signal distribution method with high-precision phase consistency |
-
2011
- 2011-05-18 JP JP2011110976A patent/JP2012242190A/en not_active Withdrawn
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103676633A (en) * | 2013-12-17 | 2014-03-26 | 天津七六四通信导航技术有限公司 | Time measurement method for satellite navigation receiver |
| JP2017531955A (en) * | 2014-06-19 | 2017-10-26 | ケネス ハンKenneth Hann | Timing signal generation method and device |
| CN104215803A (en) * | 2014-09-19 | 2014-12-17 | 国家电网公司 | Synchronous standard source and control method applied to distributive type intelligent testing platform |
| US11206496B2 (en) | 2014-12-12 | 2021-12-21 | Gn Hearing A/S | Hearing device with service mode and related method |
| US11546699B2 (en) | 2014-12-12 | 2023-01-03 | Gn Hearing A/S | Hearing device with service mode and related method |
| JP2017204832A (en) * | 2016-05-13 | 2017-11-16 | 大井電気株式会社 | Synchronous signal generation system, phase difference calculation device, and synchronous signal generation device |
| JP2020030808A (en) * | 2018-08-24 | 2020-02-27 | バイドゥ ユーエスエー エルエルシーBaidu USA LLC | Time source recovery system for autonomous driving vehicle |
| US10996681B2 (en) | 2018-08-24 | 2021-05-04 | Baidu Usa Llc | Time source recovery system for an autonomous driving vehicle |
| CN110928177A (en) * | 2019-11-14 | 2020-03-27 | 上海咏昕信息科技有限公司 | Clock synchronization system and method |
| CN110928177B (en) * | 2019-11-14 | 2021-12-10 | 上海咏昕信息科技有限公司 | Clock synchronization system and method |
| CN114513198A (en) * | 2022-02-16 | 2022-05-17 | 中国电子科技集团公司第五十四研究所 | 1pps signal distribution method with high-precision phase consistency |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20230308104A1 (en) | Phase detectors with extrapolation of timing events | |
| JP2012242190A (en) | Reference signal generation device and reference signal generating method | |
| JP3085511B2 (en) | Reference frequency generator | |
| US9348321B2 (en) | Method, time consumer system, and computer program product for maintaining accurate time on an ideal clock | |
| KR102391323B1 (en) | Time Synchronization Device, Electronic Device, Time Synchronization System and Time Synchronization Method | |
| JP5159704B2 (en) | Reference frequency generator | |
| JP5556412B2 (en) | Timing synchronization apparatus and timing synchronization method | |
| US9979406B2 (en) | High-reliability holdover method and topologies | |
| JP2017118371A5 (en) | Timing signal generating apparatus and electronic device | |
| JP5688905B2 (en) | Reference frequency generator | |
| JP2014171014A (en) | Mobile radio base station device, synchronization control method, and synchronization control program | |
| JP2009300128A (en) | Sampling synchronization device and sampling synchronization method | |
| JPH11271476A (en) | Reference frequency generating device | |
| US20160061972A1 (en) | Data acquisition apparatus using one single local clock | |
| JP2002217722A (en) | Reference frequency generator | |
| JP2010200051A (en) | Reference frequency generator | |
| CN104639158B (en) | Synchronous two phase-locked loop adjusting method | |
| JP2011182099A (en) | Reference signal generation device and method | |
| JP2017153024A (en) | Reference frequency generation device | |
| US11088695B2 (en) | Phase-locked loop apparatus and method for clock synchronization | |
| JP5039073B2 (en) | Reference frequency generator | |
| JP2017005594A (en) | Oscillation device | |
| US12117865B2 (en) | Frequency generating device and operation method thereof | |
| US11924319B2 (en) | Time synchronization device, time synchronization system, and time synchronization method | |
| CN203366007U (en) | Multi-time base signal device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140805 |