JP2012208574A - 死角判定装置およびその方法 - Google Patents
死角判定装置およびその方法 Download PDFInfo
- Publication number
- JP2012208574A JP2012208574A JP2011071974A JP2011071974A JP2012208574A JP 2012208574 A JP2012208574 A JP 2012208574A JP 2011071974 A JP2011071974 A JP 2011071974A JP 2011071974 A JP2011071974 A JP 2011071974A JP 2012208574 A JP2012208574 A JP 2012208574A
- Authority
- JP
- Japan
- Prior art keywords
- blind spot
- detection frame
- moving object
- dead
- camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Abstract
【課題】カメラで撮影した場合の障害物の裏等の死角を正確に認識する。
【解決手段】カメラ1により撮影した画像から動体の検出枠を検出する動体検出部2と、検出枠の過去の複数フレーム分を保存する検出枠移動結果保存部4と、検出枠の履歴から死角の有無を検知する死角検知部14と、検出枠の変化から死角幅を推定する死角幅推定部5と、死角高を推定する死角高推定部6と、死角幅および死角高に基づいて死角領域を設定する死角領域設定部10と、死角領域から死角撮影用カメラの設置位置を出力する死角情報出力部11とを設ける。カメラで撮影された画像データの時系列変化に基づいて動き差分や背景差分を用いて移動する動体を検出すると共に検出された動体の例えば外接四角形を検出枠として、検出枠の大きさの減少により障害物の裏側にカメラに対して障害物による死角があると判定することができ、そのような簡単な画像処理で死角を判定することができる。
【選択図】図1
【解決手段】カメラ1により撮影した画像から動体の検出枠を検出する動体検出部2と、検出枠の過去の複数フレーム分を保存する検出枠移動結果保存部4と、検出枠の履歴から死角の有無を検知する死角検知部14と、検出枠の変化から死角幅を推定する死角幅推定部5と、死角高を推定する死角高推定部6と、死角幅および死角高に基づいて死角領域を設定する死角領域設定部10と、死角領域から死角撮影用カメラの設置位置を出力する死角情報出力部11とを設ける。カメラで撮影された画像データの時系列変化に基づいて動き差分や背景差分を用いて移動する動体を検出すると共に検出された動体の例えば外接四角形を検出枠として、検出枠の大きさの減少により障害物の裏側にカメラに対して障害物による死角があると判定することができ、そのような簡単な画像処理で死角を判定することができる。
【選択図】図1
Description
本発明は、死角判定装置およびその方法に関し、特に、死角を撮影可能にするカメラの追加を容易にするための死角判定装置およびその方法に関するものである。
従来、不法侵入者等を検知するために、カメラ等の撮像装置で撮影した画像データ中の移動物体を検出し、その移動物体の有する特徴量からその移動物体が検出対象か否かの判定、またはその移動物体の種類を判定するようにしたものがある。例えば、検出した移動物体の外接四角形を求め、その外接四角形の各辺が前回の画面における位置から移動したか否かを検出し、いずれか一辺でも移動していない場合には上記の各判定を行わないようにし、一方、外接四角形の各辺の全てが移動している場合に判定処理を行うことにより、誤判定の可能性がある場合に判定処理を停止して、正確な判定を行い認識率の向上を図るとしたものがある(例えば特許文献1参照)。
一方、監視カメラとして死角領域を正確に求めたい場合がある。しかしながら、上記処理方法では、低い障害物で頭が出た状態で移動するような場合には外接四角形の各辺が移動し得るため判定処理が行われたりすることから、死角に対しての認識を正確に行うことができないという問題がある。
このような課題を解決して、カメラで撮影した場合の死角領域を正確に認識するために、本発明に於いては、カメラにより撮影された映像データから動体を検出する動体検出部と、前記動体の移動履歴から前記カメラの死角の有無を判定する死角判定部とを備える死角判定装置であって、前記動体検出部で前記動体を検出するために設定される検出枠の履歴を保持する検出枠履歴保持部を有し、前記死角判定部は、前記動体の移動履歴としての前記検出枠の履歴に基づいて、死角の有無を判定するものとした。
このように本発明によれば、カメラで撮影された画像データの時系列変化に基づいて動き差分や背景差分を用いて移動する動体を検出すると共に検出された動体の例えば外接四角形を検出枠として、動体の移動履歴として検出枠の履歴を保持し、その検出枠の履歴に基づいて検出枠の大きさが減少する場合には動体が障害物の裏に入ったとすることができ、その部分にカメラに対して障害物による死角があると判定することができるため、そのような簡単な画像処理で死角を判定することができるという優れた効果を奏する。
上記課題を解決するためになされた第1の発明は、カメラにより撮影された映像データから動体を検出する動体検出部と、前記動体の移動履歴から前記カメラの死角の有無を判定する死角判定部とを備える死角判定装置であって、前記動体検出部で前記動体を検出するために設定される検出枠の履歴を保持する検出枠履歴保持部を有し、前記死角判定部は、前記動体の移動履歴としての前記検出枠の履歴に基づいて、死角の有無を判定する構成とする。
これによると、カメラで撮影された画像データの時系列変化に基づいて動き差分や背景差分を用いて移動する動体を検出すると共に検出された動体の例えば外接四角形を検出枠として、動体の移動履歴として検出枠の履歴を保持し、その検出枠の履歴に基づいて検出枠の大きさが減少する場合には動体が障害物の裏に入ったとすることができ、その部分にカメラに対して障害物による死角があると判定することができるため、そのような簡単な画像処理で死角を判定することができる。
また、第2の発明は、前記動体検出部は、前記検出枠を前記動体に外接する上下左右の四辺からなる外接四角形として形成し、前記死角判定部は、前記検出枠が減少した場合に、該検出枠の外接四角形の縦横比の履歴に基づいて、死角があると判定する構成とする。
これによると、動体の外形を簡単な形状の外接四角形で検出し、検出枠が消滅した場合に、その外接四角形の縦横比の履歴から左右または上下に検出枠が消滅したことを判断できるため、その消滅した方向に死角があると判定することができる。
また、第3の発明は、前記死角判定部は、前記検出枠の外接四角形の縦横比の変化において、縦方向の比率が大きくなる場合に死角があると推定する構成とする。これによると、外接四角形の縦方向の比率が大きくなる場合は相対的に横方向の辺の長さが短くなる場合であり、そのような場合には検出枠の横方向にある死角に動体が入って行く場合と推定でき、それにより死角があると推定することができる。
また、第4の発明は、前記死角判定部は、前記検出枠の履歴から死角領域の左右の辺を推定する構成とする。これによると、検出枠の消滅履歴から、検出枠が左右方向に短くなって消滅した場合には、その消滅位置に死角領域の左右いずれかの辺があると推定することができ、その辺が検出枠の移動方向から死角領域の左右の辺のどちらであるかを判断できる。
また、第5の発明は、前記死角判定部は、前記死角領域の左右の辺と重なる前記検出枠の下辺に基づいて前記死角領域の上下の辺を推定する構成とする。
これによると、動体がその高さより低い障害物の死角側を移動すると頭の部分が検出枠として検出され、その下辺が死角領域の上辺と推定することができると共に、障害物の前側を移動する場合には障害物に近付くほど検出枠の下辺が障害物の下辺に近付くため、その検出枠の下辺を死角領域の下辺と推定することにより、死角領域の上下の辺を推定することができる。
また、第6の発明は、前記死角判定部は、前記動体の移動履歴から前記死角への前記動体の入退履歴を求め、該入退履歴に基づいて、前記動体が死角領域の同一側でのみ入退をしている場合には死角領域内にさらに障害物があると判定する構成とする。これによれば、動体が、死角に入った場合にその入った方向ではなく、入った側に戻るという入退を検出した場合には、死角領域内に壁等のさらに別の障害物があると判定することができる。
また、第7の発明は、前記死角判定部は、前記検出枠の大きさが減少し、かつ所定時間内に減少方向とは逆方向に増大して減少前と略同一の大きさになった場合には、前記死角領域に前記動体の移動を妨げる障害物があると判定する構成とする。
これによると、一旦障害物の死角に入ったと推定される動体の検出枠があり、かつ所定時間内に入った方向とは逆方向に出てきた動体の検出枠が検出され、その出てきた検出枠が入った検出枠と略同一の大きさであれば、同一の動体が入って出てきたと推定できることから、死角領域に動体の移動を妨げる障害物としての壁等の別の障害物があると推定することができる。
また、第8の発明は、前記検出枠履歴保持部が、前記検出枠の大きさが減少した場合の過去の複数フレームのデータを保存し、前記死角判定部は、前記死角領域の上下左右の少なくとも一辺を前記過去の複数フレームのデータを平均して求める構成とする。
これによると、1つのデータから死角領域の辺を求める場合よりも、複数のデータを用いかつ平均値から求めることから、死角領域の辺の位置をより高精度に求めることができる。
また、第9の発明は、前記死角判定部は、前記カメラにより撮影された範囲に、前記死角を撮影するカメラを配置するための指標となる座標軸を設定する構成とする。
これによると、1台のカメラによる撮影で死角となる部分を撮影するためにカメラを追加する場合に、そのカメラで撮影された範囲(画面)で、死角を横切る方向の座標軸を知ることができるため、その座標軸上にカメラを設置すれば死角を撮影可能になり、死角を撮影するカメラの設置を容易に行うことができる。
図1は、本発明の第1実施形態に係る死角判定装置の全体構成図である。図1に示すように、カメラ1で撮影した画像データが死角判定部としての死角判定制御部13の動体検出部2に入力する。
ここで、動体検出部2で処理する映像データの一例を図2を参照して説明する。図2(a)に示されるように、例えばフレーム1aの左上を原点として、横方向をX軸、縦方向をY軸として画素の座標を設定する。なお、X軸を床に対して水平にすることにより、画像のフレーム1aの横方向が動体(移動物体)としての人物Mが左右方向に移動する方向となり、フレーム1aの縦方向が高さと奥行きに対応する上下方向となる。
動体検出部2では、図2(a)に示されるフレーム1aの画像データに基づいて、人物Mの外接四角形を検出枠3として設定する。この外接四角形の求め方は背景差分・フレーム間差分などを用いた公知の画像処理(例えば、特開平11−41589号公報)によるものであって良く、その説明を省略する。そして、例えばフレーム1aの画面の左上の角を原点座標(0,0)として検出枠3の左上の角を基準座標(X0,Y0)とし、図2(a)から図2(b)のように検出枠3が移動した場合には、基準座標の変化(X0→X1、Y0→Y1)から人物Mが移動したと判定すると共に、検出枠3に追跡ID(番号)を設定し検出枠の追跡を行う。
そして、各フレームの検出枠3の状態から、図2(a)で基準座標(X0,Y0)と高さh0・幅b0とを求め、図2(b)では基準座標(X1,Y1)と高さh1・幅b1とを求め、図2(c)では基準座標(X2,Y2)と高さh2・幅b2とを求め、それぞれを同一追跡IDにおける各フレームのデータとして検出枠移動結果保存部4に出力する。この場合、高さhがほぼ変わらず(同一とみなせる許容値以内)、幅bが縮んでいることから死角があると判断する。検出枠移動結果保存部4では動体検出部2から送られてくるデータを時系列で過去の複数フレーム分を保存する。
検出枠移動結果保存部4は、所定の過去複数フレーム分のデータを死角検知部14・死角幅推定部5・死角高推定部6・死角種別推定部7にそれぞれ出力する。
死角検知部14では、検出枠の履歴から死角の有無を検知する。検出枠の履歴が下記の2つの条件を同時に満たす場合に死角があると判断する。
条件1:検出枠の高さ(h)がほぼ変わらない
条件2:検出枠の幅(b)が徐々に小さくなっている
これにより、出入口から外に出て扉を閉じた場合や、同じ場所に居続けたため背景と同化して動き差分や背景差分を用いても検出枠が消えてしまった場合等では、上記したように高さhがほとんど変化せずに幅bが徐々に小さくなる変化とはならず(例えばフレーム間で消える)、そのような場合には死角とは判定せずに死角に向かって移動する場合だけを判定することが可能となる。このようにして、死角の有無を判定することができる。
条件1:検出枠の高さ(h)がほぼ変わらない
条件2:検出枠の幅(b)が徐々に小さくなっている
これにより、出入口から外に出て扉を閉じた場合や、同じ場所に居続けたため背景と同化して動き差分や背景差分を用いても検出枠が消えてしまった場合等では、上記したように高さhがほとんど変化せずに幅bが徐々に小さくなる変化とはならず(例えばフレーム間で消える)、そのような場合には死角とは判定せずに死角に向かって移動する場合だけを判定することが可能となる。このようにして、死角の有無を判定することができる。
死角幅推定部5では、死角の幅を推定するために、先ず幅の基準となる左右両辺の位置を推定する。例えば、図2(a)の基準座標X0と幅b0とを加算した値(座標XL)を座標XL0(=X0+b0)とし、図2(b)も同様にその基準座標X1と幅b1とを加算した値を座標XL1(=X1+b1)とし、図2(c)も同様にその基準座標X2と幅b2とを加算した値を座標XL2(=X2+b2)として、これらXL0、XL1、XL2の例えば平均値を障害物8の左辺すなわち死角9の左辺のX座標XLとして推定する。その際に、X0、X1、X2の移動量とXL0、XL1、XL2の移動量を比較して移動量の少ない方が死角領域と接すると判断する。なお、図2(c)から人物Mが完全に障害物8に隠れて死角9に入った場合には検出枠3が消えることになり、そのような場合には検出枠3が消える直前のフレーム1aのX座標を死角9の左辺のX座標XLとして推定してもよい。また、図2(c)に示されるように障害物8の右辺すなわち死角9の右辺のX座標(XR)に対しても、右方から左方へ移動する検出枠に対して同様に処理することができ(この場合はX0、X1、X2の移動量の方が少なくなる)、両値の差(XR−XL)を死角幅Dbとして推定する。この場合、上記例の座標XLの推定において複数フレームによる平均値を求めており、それにより誤差を少なくし得る。また、座標XLは左辺に対応するが、右辺に対応する座標XL、また上下辺に対応する座標の推定に於いても同様にそれぞれ平均値を求めることができる。
なお、別の人物の移動履歴から過去に検出された場所と同じ位置に死角領域が検出された場合には両方の結果を統合して(平均をとるなどして)死角領域情報を更新する。また、死角幅を求める際には、検出枠3の量だけでなく検出枠内の人物形状の変化を利用してもよい。例えば、
1.枠消滅のnフレーム前の検出枠内の人物形状を記憶する。
2.枠消滅のn−1〜1フレーム前の検出枠内をnフレーム前の検出枠内の人物形状を用いてマッチングを行う。
3.マッチングの結果、人物形状のうち欠けている部分を求め、欠けているラインを死角領域の辺と推定する。
とすることにより上記処理を行うことができる。
1.枠消滅のnフレーム前の検出枠内の人物形状を記憶する。
2.枠消滅のn−1〜1フレーム前の検出枠内をnフレーム前の検出枠内の人物形状を用いてマッチングを行う。
3.マッチングの結果、人物形状のうち欠けている部分を求め、欠けているラインを死角領域の辺と推定する。
とすることにより上記処理を行うことができる。
また死角高推定部6では、死角幅推定部5から死角9の左右辺の各X座標XL・XRが入力され、それら左右辺を上下方向(Y軸方向)に延長した両線分L1・L2により挟まれる領域を設定すると共に、両線分L1・L2により挟まれる領域に対して過去の複数フレームおける複数の検出枠3が重なるものを全て抽出する(図3(a)の矩形破線)。次に、各検出枠3の下辺において上側部分の中から最下位のものを上側下辺3aとし、下側部分の中から最上位のものを下側下辺3bとして抽出し、それらの一例を図3(b)に示す。両下辺3a・3bをL1とL2間に延長したものを死角領域の上下辺L3・L4と推定し、それら上下辺L3・L4の各Y座標YU・YDを求めることができる。上下辺L3・L4の間隔を障害物8による死角9の高さとなる死角高Dhと推定する。なお、上側と下側の区別は、検出領域幅検出の際に用いた検出枠の中心点の平均位置より画面上の上側か下側かで区別すればよい。
死角幅推定部5により推定された死角幅Dbと、死角高推定部6により推定された死角領域の上下左右辺のデータ(各X座標XL・XRと各Y座標YU・YD)が死角領域設定部10に入力される。死角領域設定部10では、死角幅Dbと死角高Dhとに囲まれた奥側を死角9の領域(各X座標XL・XRと各Y座標YU・YDとにより囲まれた領域)として設定する。なお、図3(b)の場合は画面(フレーム)内で上下辺が求められた場合であり、例えば柱等の場合には画面の上下方向に延在している場合があり、その場合には左右辺が上記両線分L1・L2となって上下辺が無いことになるが、画面内での死角領域としては左右辺のみで問題無い。
死角領域設定部10で設定された死角9の領域データは死角種別推定部7に出力される。死角種別推定部7では、死角領域データと、検出枠移動結果保存部4から入力する所定の過去複数フレーム分のデータとに基づいて、死角領域の種別を推定する。死角領域の種類としては、障害物8の裏側が通り抜け可能になっているものと、カメラ1に対して障害物8により隠れていると共に奥側に延在する壁や棚等があることにより通り抜け不可能になっいるものとがある。
死角種別推定部7では、上記2種類の死角領域の種類の判別を行うことができる。一度死角領域に入ってしまうと追跡が途切れてしまうため同一物体が障害物の裏側を通り抜けたのか通り抜けられずに戻ってきたのかの判別はできないが、出入りのタイミングから推測することで障害物の種類を推測する。
死角種別推定部7は、移動履歴から死角領域への入退状況を求める。図4(a)、(b)は図において上から下へ時間経過tを示しており、各矢印は死角領域に対して移動した人物Mの移動履歴から求めた入退状況を表すものである。入退状況の対応付けは入退の時刻が近いものを対応付けたり、あらゆる対応付けを想定してその中から移動速度なども考慮して最も尤度の高い対応付けを選択するなどすればよい。
例えば、移動物体(人物M)が図4(a)のように検出された場合には、死角領域に入っていく移動履歴101に対して移動履歴102が対応すると推定できる。この場合、上記入退の時刻が近いものを例とすると、時刻T1に死角領域に移動履歴101が入り、時刻T2に死角領域から移動履歴102が退出し、その入退の時間間隔(T2−T1)が対応付けとして設定された所定時間Td以内((T2−T1)≦Td)である。そして、移動履歴101と102とは死角領域の同じ側で入退している。同様に移動履歴111と112、121と122がそれぞれ対応付けられると推定できる。各対応付けられた移動履歴も死角領域の同じ側で入退している。これらの履歴から障害物の裏側を通り抜ける移動履歴はないと推定されるため障害物の裏側は通り抜けができない種類の死角であると推定できる。
また図4(b)のように検出された場合には、死角に入る移動履歴201に対して移動履歴202が対応すると推定できる。同様に移動履歴211と212が対応付けられると推定できる。この場合には各対応付けられた移動履歴が死角領域に入った側とは反対側から退出しており、これらの履歴から障害物の裏側を通り抜ける移動履歴があると推定されるため障害物の裏側は通り抜けが可能な種類の死角であると推定できる。
また、さらに検出枠の大きさを考慮することで対応付けの精度を向上することができる。例えば、移動が検出されて追跡IDが付与された検出枠3の下辺が上記したように減少して消滅し、所定時間(例えば検出枠3の移動速度と障害物8の幅とから通過するのに大きく外れない時間)内に移動方向側にて増大する検出枠が現れて略同一の大きさの検出枠3として再度検出された場合には、同一追跡IDに対応する人物Mが障害物8の死角9側を通り抜けたと推定する。この場合には、障害物8を上側から見た図5(a)に示されるように通り抜け可能な死角9aであるとする。一方、検出枠3の下辺が減少しまたは消滅し、かつ移動方向とは逆向き、すなわち戻る方向に、所定時間(例えば検出枠3の移動速度と障害物8の幅とから戻るのに大きく外れない時間)内に増大する検出枠が現れて略同一の大きさの検出枠3として再度検出された場合には、同一追跡IDに対応する人物Mが障害物8の死角9に第2の障害物としての例えば壁8aがあるため引き返したと推定する。この場合には図5(b)に示されるように通り抜け不可能な死角9bであるとする。
次に、図6のフローを参照して本発明に基づく制御要領を説明する。先ずステップST1では、動体検出部2によりカメラ1からのフレーム1aの画像データを読み込む。次のステップST2では、動体検出部2により上記した差分検出により動体(人物M)の移動を検出したら、上記したように外接四角形からなる検出枠3を設定する。次のステップST3では死角検知部14により上記したように2つの条件に基づいて死角領域の有無の判定を行い、死角領域有りと判定された場合にはステップST4に進み、死角領域無しと判定された場合にはステップST1に戻る。ステップST4では死角幅推定部5により障害物8の死角9となる領域の死角幅Dbを検出し、次のステップST5では死角高推定部6により死角9となる領域の死角高Dhを検出して、次のステップST6に進む。
ステップST6では、死角9となる領域の上辺の有無を判別する。死角9となる領域の上辺が無いと判定された場合にはステップST7に進む。ステップST7では、死角9の種別を判定する。種別としては、上記したように障害物8の裏側(死角9)を通り抜け可能か否かの2種類であって良い。
ステップST7の次、またはステップST6で死角9となる領域の上辺が有ると判定された場合にはステップST8に進む。死角9となる領域の上辺は図3(b)の上側下辺3aにより決定される。上記したように検出枠3の下辺の履歴から上側下辺3aが検出された場合には死角9となる領域の上辺があるとしてステップST8に進む。そのステップST8では、ステップST6およびST7の結果に基づいて死角9となる領域の情報を出力する。この情報の出力としては、図1に示されるようにモニタ12での表示であって良い。例えば図3(b)のようにモニタ12の画面上に、撮影された障害物8と、死角9の領域を表す矩形太線とを映し出して、死角9を知らせることができる。例えば監視カメラの配置において、死角9を側方から撮影可能な位置に別のカメラを設置する際の目安として有効となる。
次に、死角撮影用カメラの設置位置を最少構成で可能とする例を以下に説明する。図1に示されるカメラ位置指示部21は、1台目のカメラ1の配置により死角9となる領域を撮影可能にする死角撮影用カメラの配置の目安となる位置を自動的に検出可能にするためのものである。
カメラ位置指示部21としては、上記死角情報出力部11からの死角情報が入力するカメラ位置決定部21aと、カメラの種類がデータベース化されて保存されているカメラデータベース部21bと、カメラ1からの画像データが入力すると共にカメラ位置決定部21aからのカメラ位置情報が入力する画像合成部21cとにより構成されていて良い。
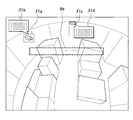
カメラ位置決定部21aは、例えば、図7(a)に示されるように例えば店舗のフロアの中央に全周位カメラ1を設置した場合に、カメラ1の撮像例である図7(b)に併せて示されるように、死角が生じる例として示した障害物(棚)8のカメラ1に対して裏側となる部分に死角9となる領域が生じる。
図7(b)に示されるように、モニタ12の画面上には本図示例における全周囲カメラ1における横方向円周ラインLbおよび縦方向円周ラインLlと、任意のカメラ設置高ラインLhとが表示される。なお、各円周ラインLb・Llは、平面上における直線に対応し、本図示例の全周囲カメラ1の画像の場合には円弧状のラインとして示される。それら各ラインLb・Ll・Lhはキー操作等により任意の位置を設定可能であり、例えば横方向円周ラインLcは死角となる領域にラインを合わせることにより図に示される全体の楕円形の短軸長さが変化する。そして、モニタ12上で、死角9に合わせて横方向円周ラインLbを位置決めする。そのようにして位置決めした横方向円周ラインLbとカメラ設置高ラインLhとの交点P1・P2のいずれか一方に死角撮影用カメラ31を設置すると良い(図示例では交点P1に設置)。
また、上記死角撮影用カメラ31の設置において、カメラデータベース部21bから好適な機種を選択して、図8に示されるようにモニタ12上に表示することができる。モニタ12には図の破線で示されるように死角9aとなる領域が表示され、例えば上記交点P2に対応する位置にカメラデータベース部21bから選択した推奨カメラの外観映像31aおよびその仕様31bを表示するとよい。図8では、別の位置(死角9の中央部分の真上)に推奨カメラとして例えば広角カメラの外観映像31cおよびその仕様31dを表示する例も併せて示している。ユーザーはこれらの情報に基づいて追加カメラの設置を行う。これにより、カメラを仮設して死角がないかを検証したり専門家を呼んでカメラの位置を決めてもらうということなく簡易に死角を解消するための追加カメラの位置を決めることができる。
さらに、死角の有無に応じてカメラを追加する場合の操作要領について図9のフローを参照して説明する。なお、図示例のフローは、モニタ12の画面上での操作における要領となる。先ずステップST11では上記と同じ操作により死角9の位置を横切る横方向ラインLbの設定を行い、上記したように交点P1に死角撮影用カメラ31を設置して、次のステップST12では、その横方向円周ラインLc上に他の死角があるか否かを判別する。
上記図5(b)で説明したように、壁8aがあることにより他の死角(図7(a)の9b)があると自動判定された場合には、図7(b)の画面上にその旨の表示(図示せず)をしておくことにより、死角9bの存在を確認することができ、その場合にはステップST13に進む。ステップST13では、横方向円周ラインLc上で死角9bを反対側から撮影するべく、交点P2に追加の死角撮影用カメラ32を設置する。
そして、次のステップST14では、死角9を通る縦方向円周ラインLlをキー操作等により図7(b)に示されるように位置決めし、そのライン上に他の死角が有るか否かを判別する。図7(b)のように他の死角が無いと判定した場合には本フローを終了する。
一方、ステップST12で横方向円周ラインLb上に他の死角が無いと判定した場合にはステップST15に進む。ステップST15では、上記ステップST14と同様に縦方向円周ラインLlを位置決めしてそのライン上に他の死角が有るか否かを判別し、死角が有る(図示せず)と判定した場合にはステップST16に進む。ステップST16では、縦方向円周ラインLlとカメラ設置高ラインLhとの交点P3・P4のいずれか一方にさらなる死角撮影用カメラを設置すると良い。ステップST16の処理後、またはステップST15で縦方向円周ライン上Llに他の死角が無いと判定した場合には本フローを終了する。
このようにして、例えば図7(a)の場合には死角9が2つあるが、それら死角9が同一横方向円周ラインLb上に位置することが簡単に分かり、それに応じて上記したように1台の死角撮影用カメラ31の設置という最少構成で、店舗内の死角9を無くした撮影が可能となる。そして、上記フローに基づいて、死角9を通る横方向および縦方向の各円周ラインLb・Ll上の死角の有無を順番に確認していくことにより、同様にして最少構成のカメラの設置台数で死角の無い撮影が可能である。なお、本死角判定装置の構成として、動体検出を行い枠を出力するところまでをカメラが行い、死角検知以降を死角判定装置が行う構成やカメラ位置指示部21が別装置になっていてもよい。
なお、上記実施の形態では人物Mがフレーム1aの主に左右方向に移動する場合について説明したが、本発明によれば上下方向(手前側と奥側)へ移動する場合にも適用可能である。例えば、天井から吊り下げられた広告板等がある場合に、その下を動体(人物)が手前から奥側に移動して、天井に設置されたカメラ1から見て広告板の裏側に動体(人物)が隠れることが考えられる。動体(人物)が広告板の手前側から奥側に移動する場合には検出枠3の縦横比で縦の比率が減少し、広告板の奥側から手前に移動する場合には縦の比率が増加する。これによりカメラ1から見て手前側から奥側となる方向に死角があると判定することができる。
本発明にかかる死角判定装置は、カメラで撮影された画像データの動体の移動履歴に基づいて動体の検出枠が減少する場合に死角があると判定するという簡単な画像処理で死角を判定することができ、監視カメラの配置を求める装置等として有用である。
1 カメラ
2 動体検出部
3 検出枠
4 検出枠移動結果保存部
5 死角幅推定部
6 死角高推定部
7 死角種別推定部
10 死角領域設定部
11 死角情報出力部
13 死角判定制御部
21 カメラ位置指示部
2 動体検出部
3 検出枠
4 検出枠移動結果保存部
5 死角幅推定部
6 死角高推定部
7 死角種別推定部
10 死角領域設定部
11 死角情報出力部
13 死角判定制御部
21 カメラ位置指示部
Claims (10)
- カメラにより撮影された映像データから動体を検出する動体検出部と、
前記動体の移動履歴から前記カメラの死角の有無を判定する死角判定部とを備える死角判定装置であって、
前記動体検出部で前記動体を検出するために設定される検出枠の履歴を保持する検出枠履歴保持部を有し、
前記死角判定部は、前記動体の移動履歴としての前記検出枠の履歴に基づいて、死角の有無を判定することを特徴とする死角判定装置。 - 前記動体検出部は、前記検出枠を前記動体に外接する上下左右の四辺からなる外接四角形として形成し、
前記死角判定部は、前記検出枠が減少した場合に、該検出枠の外接四角形の縦横比の履歴に基づいて、死角があると判定することを特徴とする請求項1に記載の死角判定装置。 - 前記死角判定部は、前記検出枠の外接四角形の縦横比の変化において、縦方向の比率が大きくなる場合に死角があると推定することを特徴とする請求項2に記載の死角判定装置。
- 前記死角判定部は、前記検出枠の履歴から死角領域の左右の辺を推定することを特徴とする請求項2または請求項3に記載の死角判定装置。
- 前記死角判定部は、前記死角領域の左右の辺と重なる前記検出枠の下辺に基づいて前記死角領域の上下の辺を推定することを特徴とする請求項4に記載の死角判定装置。
- 前記死角判定部は、前記動体の移動履歴から前記死角への前記動体の入退履歴を求め、該入退履歴に基づいて、前記動体が死角領域の同一側でのみ入退をしている場合には死角領域内にさらに障害物があると判定することを特徴とする請求項1乃至請求項5のいずれかに記載の死角判定装置。
- 前記死角判定部は、前記検出枠の大きさが減少し、かつ所定時間内に減少方向とは逆方向に増大して減少前と略同一の大きさになった場合には、前記死角領域に前記動体の移動を妨げる障害物があると判定することを特徴とする請求項1乃至請求項5のいずれかに記載の死角判定装置。
- 前記検出枠履歴保持部が、前記検出枠の大きさが減少した場合の過去の複数フレームのデータを保存し、
前記死角判定部は、前記死角領域の上下左右の少なくとも一辺を前記過去の複数フレームのデータを平均して求めることを特徴とする請求項4乃至請求項7のいずれかに記載の死角判定装置。 - 前記死角判定部は、前記カメラにより撮影された範囲に、前記死角を撮影するカメラを配置するための指標となる座標軸を設定することを特徴とする請求項1に記載の死角判定装置。
- カメラにより撮影された映像データから動体を検出しかつ当該動体の検出枠を求める過程と、
求められた前記検出枠の移動履歴を保持する過程と、
前記検出枠の移動履歴から前記カメラの死角があると判定する過程とを有することを特徴とする死角判定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011071974A JP2012208574A (ja) | 2011-03-29 | 2011-03-29 | 死角判定装置およびその方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011071974A JP2012208574A (ja) | 2011-03-29 | 2011-03-29 | 死角判定装置およびその方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012208574A true JP2012208574A (ja) | 2012-10-25 |
Family
ID=47188283
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011071974A Withdrawn JP2012208574A (ja) | 2011-03-29 | 2011-03-29 | 死角判定装置およびその方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012208574A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014061166A (ja) * | 2012-09-21 | 2014-04-10 | Konami Digital Entertainment Co Ltd | ゲームシステム、制御方法、サーバ装置、及びプログラム |
| WO2020067070A1 (ja) * | 2018-09-28 | 2020-04-02 | パナソニックIpマネジメント株式会社 | 情報処理システム及び情報処理方法 |
-
2011
- 2011-03-29 JP JP2011071974A patent/JP2012208574A/ja not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014061166A (ja) * | 2012-09-21 | 2014-04-10 | Konami Digital Entertainment Co Ltd | ゲームシステム、制御方法、サーバ装置、及びプログラム |
| WO2020067070A1 (ja) * | 2018-09-28 | 2020-04-02 | パナソニックIpマネジメント株式会社 | 情報処理システム及び情報処理方法 |
| JP2020052920A (ja) * | 2018-09-28 | 2020-04-02 | パナソニックIpマネジメント株式会社 | 情報処理システム及び情報処理方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7596240B2 (en) | Object tracking method and object tracking apparatus | |
| KR101073076B1 (ko) | 복합카메라를 이용한 화재감시 시스템 및 방법 | |
| JP4140567B2 (ja) | 物体追跡装置および物体追跡方法 | |
| US9514541B2 (en) | Image processing apparatus and image processing method | |
| US9418556B2 (en) | Apparatus and method for displaying a blind spot | |
| JP2020184795A (ja) | 映像監視システム、映像監視方法、及びプログラム | |
| WO2011102072A1 (ja) | 対象物追跡装置、対象物追跡方法、および対象物追跡プログラム | |
| US8934671B2 (en) | Traffic line creation device and traffic line creation method | |
| JP6377795B1 (ja) | エレベータの乗車検知システム | |
| JP5853141B2 (ja) | 人数計測装置、人数計測システムおよび人数計測方法 | |
| WO2005107240A1 (ja) | 自動撮影方法および装置 | |
| US10564250B2 (en) | Device and method for measuring flight data of flying objects using high speed video camera and computer readable recording medium having program for performing the same | |
| EP2718898A1 (en) | Image display apparatus and image display method | |
| US9984300B2 (en) | Image processing system, image processing method, and program | |
| EP2811736A1 (en) | Optimum camera setting device and optimum camera setting method | |
| US20130278778A1 (en) | Automatic tracking apparatus | |
| US10885637B2 (en) | System and method for dynamically tracking and indicating a path of an object | |
| JP2010128727A (ja) | 画像処理装置 | |
| JP5105972B2 (ja) | 座標変換方法及びパラメータ調整方法及び監視システム | |
| JP5687035B2 (ja) | 人物追跡装置 | |
| KR20100087996A (ko) | 구조물 변형 감지 시스템 및 방법 | |
| JP4214291B1 (ja) | 接地点推定装置、接地点推定方法、動線表示システムおよびサーバ | |
| KR20140108035A (ko) | 주차관리 시스템 및 주차관리 방법 | |
| JP2008226109A (ja) | 映像解析システムおよび映像解析方法 | |
| JP2018146326A (ja) | 移動体の位置推定装置及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140603 |