JP2012181030A - 静電容量型加速度センサ - Google Patents
静電容量型加速度センサ Download PDFInfo
- Publication number
- JP2012181030A JP2012181030A JP2011042328A JP2011042328A JP2012181030A JP 2012181030 A JP2012181030 A JP 2012181030A JP 2011042328 A JP2011042328 A JP 2011042328A JP 2011042328 A JP2011042328 A JP 2011042328A JP 2012181030 A JP2012181030 A JP 2012181030A
- Authority
- JP
- Japan
- Prior art keywords
- layer support
- acceleration sensor
- substrate
- lower layer
- upper layer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Abstract
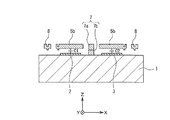
【解決手段】基板101と、基板101上に固定された固定電極121、122と、固定電極121、122の上面に対向するように配置された可動電極105と、可動電極105を基板101上面に直交する方向に変位可能に基板101上に弾性支持する弾性支持部180と、を備え、弾性支持部180は、基板101上に固定された絶縁体からなる下層支持部121、122と、下層支持部121、122上に固定された上層支持部117と、基板101上面に沿って長い形状を有し、且つ一端部が上層支持部107に結合され他端部が可動電極105に結合された梁部106と、を有し、下層支持部121、122は、梁部106と上層支持部107との結合部分の直下に位置する部分に空隙部130を有する。
【選択図】 図1
Description
図10は、従来の加速度センサを説明するための上面図である。図11は、図10中に示した一点鎖線D−Dに沿う断面図である。図示した加速度センサは、図中に示したZ方向に印加される加速度を検出するためのセンサである。そして、シリコン基板1上に固定された第1の固定電極2と、第2の固定電極3と、を備えている。
可動電極部5aの変位により、図11中に示した可動電極部5a下に生じる静電容量C1と可動電極部5b下に生じる静電容量C2との間に差異が生じる。図10、11に示した静電容量型加速度センサは、静電容量C1と静電容量C2との相違によって静電容量型加速度センサに印加された加速度を検出している。
なお、このような静電容量型加速度センサは、例えば、特許文献1に記載されている。
本発明は、上記の点に鑑みてなされたものであり、通常使用時に印加される加速度よりも大きな加速度が加わった場合にも、可動電極の支持部と梁部との間が損傷を受けることがなく、信頼性の高い静電容量型加速度センサを提供することを目的とする。
また、本発明の静電容量型加速度センサは、上記した発明において、前記下層支持部は、さらに、前記長部の直下に位置する部分の一部に空隙部(例えば図7に示した空隙部140)を有することが望ましい。
(実施形態1)
[全体の構成]
図1は、実施形態1の静電容量型加速度センサの全体を説明するための上面図である。実施形態1の静電容量型加速度センサは、可動電極105と、可動電極105に上層支持部117を接続する梁部106と、を有している。上層支持部117は、梁部106の長手方向(図中に示したY方向)に沿って長い形状を有する2つの長部155a、155bと、2つの長部155a、155bの間を接続する短部107とを含む「H」型の平面形状を有している。また、可動電極105の周囲には、枠110が設けられている。
図2は、実施形態1の静電容量型加速度センサを、図1中に破線で示した範囲Pで切り出した部分の斜視図である。
以下、実施形態1の静電容量型加速度センサについて説明する。
図3は、実施形態1の静電容量型加速度センサ100を説明するための図である。図3(a)は静電容量型加速度センサ100の上面図、図3(b)は図3(a)中に示した破線A−Aに沿う断面図、図3(c)は図3(a)中に示した線B−Bに沿う断面図である。図3中には図3における方向を示すX軸、Y軸、Z軸を示し、以降の説明を、図示したX軸、Y軸、Z軸が示す方向を使って行うものとする。実施形態1の静電容量型加速度センサ100は、Z方向に印加される加速度を検出するセンサである。
そして、下層支持部121、122は、梁部106と上層支持部117との結合部分の直下に位置する部分に空隙部130を有している。
図1に示したように、上層支持部117は可動電極部105aを可動電極105の中央よりも−X方向に偏った位置で可動電極105を支持している。このため、可動電極105にZ方向の加速度が印加されると、可動電極部105bが下側に変位するとともに、可動電極部105aが上側に変位する。このとき、可動電極部105aと基板101との間の静電容量と可動電極部105bと基板101との間の静電容量とに差が生じる。実施形態1の静電容量型加速度センサは、差分を検出することによってZ方向に印加された加速度を検出している。
このことにより、図3に示した静電容量型加速度センサ100は、上層支持部と下層支持部との境界部分において損傷を受けることがない。
次に、実施形態1によって得られる応力緩和の効果を説明する。
実施形態1によって得られる効果に先立って、先ず、実施形態1の構成と比較される静電容量型加速度センサの構成(参考例)と、参考例の静電容量型加速度センサにかかる応力について説明する。
図4は、参考例の静電容量型加速度センサ400を説明するための図である。図4(a)は静電容量型加速度センサ400の上面図、図4(b)は図4(a)中の線A−Aに沿う断面図、図4(c)は図4(a)中の線B−Bに沿う断面図である。図4において、図3に示した構成と同様の構成については同様の符号を付し、その説明を一部略すものとする。
図4に示したように、静電容量型加速度センサ400は、図3に示した静電容量型加速度センサ100と比較して、上層支持部117の底面のうち、短部107直下にある面が全て下層支持部420によって支持されている点が静電容量型加速度センサ100と相違する。
上層支持部117と下層支持部106との境界部は、他の部分に比較して剥離等による損傷を受けやすい。このため、図5のように、境界部にかかった応力が境界部に損傷を与えることがある。
図6は、図3に示した実施形態1の静電容量型加速度センサ100の上層支持部117と下層支持部121及び122との間にかかる応力をシミュレーションして得た結果を示す図である。図6(a)は、シミュレーションに使った解析モデルを示している。図6(a)は、弾性支持部の底面を模式的に示していて、符号106、117、155a、155bは、図示した底面の上にあるそれぞれが示す構成の位置を仮想的に示している。図6(a)中に網かけで示した範囲Qは、図3に示した下層支持部121、122が上層指示部117と接する範囲を示している。
図6に示したように、実施形態1の静電容量型加速度センサ100では、X方向に過大な加速度が加わった場合にも、上層支持部117と下層支持部121及び122との境界部に加わる応力が図5に示した例よりも小さくなっている。具体的には、図6に示したシミュレーションにおいて、最大応力が8.89Mpaであることが観測された。したがって、実施形態1は、参考例に比べて上層支持部117と下層支持部121及び122との境界部に加わる応力を低減できることが明らかである。このような実施形態1によれば、静電容量型加速度センサを内蔵する機器が床面に落ちる等した場合であっても加速度の測定に関する精度の低下を抑え、信頼性の高い静電容量型加速度センサを提供することができる。
次に、本発明の実施形態2について説明する。なお、実施形態2の静電容量型加速度センサの上面図や斜視図は実施形態1と同様のものであるので、図示及び説明を省くものとする。
[弾性支持部に関する構成]
図7は、実施形態2の静電容量型加速度センサ200を説明するための図である。図7(a)は静電容量型加速度センサ200の上面図、図7(b)は図7(a)中の線A−Aに沿う断面図、図7(c)は図7(a)中の線B−Bに沿う断面図である。図7において、図3に示した構成と同様の構成については同様の符号を付し、その説明を一部略すものとする。
図8は、図7に示した静電容量型加速度センサ200の上層支持部117と下層支持部141及び142との間にかかる応力をシミュレーションして得た結果を示す図である。図8(a)は、シミュレーションに使った解析モデルを示し、図8(b)は上層支持部117と下層支持部141及び142との間にかかる応力を等高線で示した応力分布図である。シミュレーションでは、静電容量型加速度センサ200に対し、X方向に10000Gの加速度を0.1ms加えたときに発生する応力を求めている。
さらに、本発明の静電容量型加速度センサは、以上説明した実施形態1、実施形態2に限定されるものではない。すなわち、実施形態1、実施形態2は、いずれも上層支持部117の底面のうち短部107直下の全面に接する空隙部130、140が設けられていて、2つの長部155a、155bの底面は互いに接続されていなかった。
しかし、本発明の静電容量型加速度センサは、梁部106と上層支持部117との結合部分の直下に位置する部分に空隙部を有すればよく、長部155a、155bの底面が互いに接続されていてもよい。
このような静電容量型加速度センサ300によっても、実施形態1、実施形態2の静電容量型加速度センサ100、200と同様の理由により、上層支持部と下層支持部との境界部で発生する応力を静電容量型加速度センサ400よりも小さくすることができる。
以上説明した静電容量型加速度センサは、いずれも基板101にシリコン基板が用いられる。また、下層支持部はSiO2等の絶縁物で、上層支持部(長部及び短部)、梁部、可動電極はSiであり、固定電極はAl等の導体である。可動電極には不純物が注入されていて、この注入濃度は静電容量型加速度センサに要求される特性や性能に応じて決定される。また、上層支持部と基板との間に設けられる空隙部の大きさも静電容量型加速度センサのサイズや強度、精度に応じて決定される。ただし、空隙部の大きさは小さいよりも大きい方が応力緩和の効果が高く、小さいよりも大きい方が弾性支持部の基板に対する固定の強度が高まる。このため、空隙部の大きさは、固定の強度の許容範囲内であって、なるべく大きいことが望ましい。
105 可動電極
105a、105b 可動電極部
106 梁部
107 短部
117 上層支持部
121、122、141、142、420 下層支持部
123、124 固定電極
130、140空隙部
155a、155b 長部
100、200、300、400 静電容量型加速度センサ
Claims (3)
- 基板と、
前記基板上に固定された固定電極と、
前記固定電極の上面に対向するように配置された可動電極と、
前記可動電極を前記基板上面に直交する方向に変位可能に前記基板上に弾性支持する弾性支持部と、
を備え、
前記弾性支持部は、
前記基板上に固定された絶縁体からなる下層支持部と、
前記下層支持部上に固定された上層支持部と、
前記基板上面に沿って長い形状を有し、且つ一端部が前記上層支持部に結合され他端部が前記可動電極に結合された梁部と、
を有し、
前記下層支持部は、前記梁部と前記上層支持部との結合部分の直下に位置する部分に空隙部を有することを特徴とする静電容量型加速度センサ。 - 前記上層支持部が、前記梁部の長手方向に沿って長い形状を有する2つの長部と、2つの前記長部の間を接続する短部とを含む平面形状を有し、
前記下層支持部は、前記短部の直下に位置する部分の全てに空隙部を有することを特徴とする静電容量型加速度センサ。 - 前記下層支持部は、さらに、前記長部の直下に位置する部分の一部に空隙部を有することを特徴とする静電容量型加速度センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011042328A JP5700652B2 (ja) | 2011-02-28 | 2011-02-28 | 静電容量型加速度センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011042328A JP5700652B2 (ja) | 2011-02-28 | 2011-02-28 | 静電容量型加速度センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012181030A true JP2012181030A (ja) | 2012-09-20 |
| JP5700652B2 JP5700652B2 (ja) | 2015-04-15 |
Family
ID=47012363
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011042328A Active JP5700652B2 (ja) | 2011-02-28 | 2011-02-28 | 静電容量型加速度センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5700652B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015021786A (ja) * | 2013-07-17 | 2015-02-02 | セイコーエプソン株式会社 | 機能素子、電子機器、および移動体 |
| CN105021177A (zh) * | 2014-05-01 | 2015-11-04 | 精工爱普生株式会社 | 功能元件、物理量传感器、电子设备以及移动体 |
| JP2016042042A (ja) * | 2014-08-15 | 2016-03-31 | セイコーエプソン株式会社 | 物理量センサー、物理量センサー装置、電子機器および移動体 |
| JP2017156353A (ja) * | 2017-05-18 | 2017-09-07 | セイコーエプソン株式会社 | 物理量センサー、電子機器、および移動体 |
| JP2018021920A (ja) * | 2017-09-04 | 2018-02-08 | セイコーエプソン株式会社 | 物理量センサー、電子機器、および移動体 |
| CN108663539A (zh) * | 2017-03-27 | 2018-10-16 | 精工爱普生株式会社 | 物理量传感器、电子设备、便携式电子设备及移动体 |
| US10228386B2 (en) | 2014-08-27 | 2019-03-12 | Seiko Epson Corporation | Physical quantity sensor, electronic device, and mobile body |
| US10641789B2 (en) | 2014-08-15 | 2020-05-05 | Seiko Epson Corporation | Physical quantity sensor, physical quantity sensor device, electronic equipment, and moving body |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019045172A (ja) | 2017-08-30 | 2019-03-22 | セイコーエプソン株式会社 | 物理量センサー、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 |
| JP2019045170A (ja) | 2017-08-30 | 2019-03-22 | セイコーエプソン株式会社 | 物理量センサー、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 |
| JP2019045171A (ja) | 2017-08-30 | 2019-03-22 | セイコーエプソン株式会社 | 物理量センサー、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003044539A1 (fr) * | 2001-11-19 | 2003-05-30 | Mitsubishi Denki Kabushiki Kaisha | Accelerometre |
| US20080173959A1 (en) * | 2007-01-19 | 2008-07-24 | Stmicroelectronics S.R.L. | Z-axis microelectromechanical device with improved stopper structure |
| JP2008224254A (ja) * | 2007-03-08 | 2008-09-25 | Oki Electric Ind Co Ltd | センサ装置、センサ装置の製造方法 |
| JP2011038872A (ja) * | 2009-08-10 | 2011-02-24 | Alps Electric Co Ltd | Memsセンサ |
-
2011
- 2011-02-28 JP JP2011042328A patent/JP5700652B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003044539A1 (fr) * | 2001-11-19 | 2003-05-30 | Mitsubishi Denki Kabushiki Kaisha | Accelerometre |
| US20080173959A1 (en) * | 2007-01-19 | 2008-07-24 | Stmicroelectronics S.R.L. | Z-axis microelectromechanical device with improved stopper structure |
| JP2008292451A (ja) * | 2007-01-19 | 2008-12-04 | Stmicroelectronics Srl | 酸素吸収剤及び耐膨潤性、耐剥離性及び表面平滑性に優れた脱酸素性容器 |
| JP2008224254A (ja) * | 2007-03-08 | 2008-09-25 | Oki Electric Ind Co Ltd | センサ装置、センサ装置の製造方法 |
| JP2011038872A (ja) * | 2009-08-10 | 2011-02-24 | Alps Electric Co Ltd | Memsセンサ |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015021786A (ja) * | 2013-07-17 | 2015-02-02 | セイコーエプソン株式会社 | 機能素子、電子機器、および移動体 |
| TWI659213B (zh) * | 2014-05-01 | 2019-05-11 | 日商精工愛普生股份有限公司 | 功能元件、物理量感測器、電子機器及移動體 |
| CN105021177A (zh) * | 2014-05-01 | 2015-11-04 | 精工爱普生株式会社 | 功能元件、物理量传感器、电子设备以及移动体 |
| JP2015212624A (ja) * | 2014-05-01 | 2015-11-26 | セイコーエプソン株式会社 | 機能素子、物理量センサー、電子機器及び移動体 |
| US9828235B2 (en) | 2014-05-01 | 2017-11-28 | Seiko Epson Corporation | Functional element, physical quantity sensor, electronic apparatus and mobile entity |
| CN105021177B (zh) * | 2014-05-01 | 2020-03-24 | 精工爱普生株式会社 | 功能元件、物理量传感器、电子设备以及移动体 |
| US10421661B2 (en) | 2014-05-01 | 2019-09-24 | Seiko Epson Corporation | Functional element, electronic apparatus and mobile entity |
| JP2016042042A (ja) * | 2014-08-15 | 2016-03-31 | セイコーエプソン株式会社 | 物理量センサー、物理量センサー装置、電子機器および移動体 |
| US10641789B2 (en) | 2014-08-15 | 2020-05-05 | Seiko Epson Corporation | Physical quantity sensor, physical quantity sensor device, electronic equipment, and moving body |
| US10228386B2 (en) | 2014-08-27 | 2019-03-12 | Seiko Epson Corporation | Physical quantity sensor, electronic device, and mobile body |
| US10663481B2 (en) | 2014-08-27 | 2020-05-26 | Seiko Epson Corporation | Physical quantity sensor, electronic device, and mobile body |
| CN108663539A (zh) * | 2017-03-27 | 2018-10-16 | 精工爱普生株式会社 | 物理量传感器、电子设备、便携式电子设备及移动体 |
| US10788510B2 (en) | 2017-03-27 | 2020-09-29 | Seiko Epson Corporation | Physical quantity sensor, electronic device, and vehicle |
| US11181546B2 (en) | 2017-03-27 | 2021-11-23 | Seiko Epson Corporation | Physical quantity sensor, electronic device, and vehicle |
| CN108663539B (zh) * | 2017-03-27 | 2021-12-21 | 精工爱普生株式会社 | 物理量传感器、电子设备、便携式电子设备及移动体 |
| JP2017156353A (ja) * | 2017-05-18 | 2017-09-07 | セイコーエプソン株式会社 | 物理量センサー、電子機器、および移動体 |
| JP2018021920A (ja) * | 2017-09-04 | 2018-02-08 | セイコーエプソン株式会社 | 物理量センサー、電子機器、および移動体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5700652B2 (ja) | 2015-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5700652B2 (ja) | 静電容量型加速度センサ | |
| EP3076124B1 (en) | Tactile probing system | |
| TWI417547B (zh) | Capacitive sensor | |
| US9310265B2 (en) | Tactile sensor and multi-axial tactile sensor | |
| JP4884753B2 (ja) | 導電性接触子ユニットおよび導電性接触子 | |
| US20180120110A1 (en) | Mems link mechanism used for gyroscope | |
| KR20100029155A (ko) | 가속도 센서 | |
| TWI816711B (zh) | 微機械z軸慣性感測器及其生產方法 | |
| CN101467050B (zh) | 加速度传感器 | |
| US20170363656A1 (en) | Z-axis structure in accelerometer | |
| US20140090468A1 (en) | Tri-axial mems inertial sensor | |
| US20130241546A1 (en) | 3d mems magnetometer | |
| US20140216156A1 (en) | Acceleration sensor | |
| JP2007298410A (ja) | 静電容量式センサ | |
| JP6260063B2 (ja) | 平行板コンデンサ及びこれを含む加速度センサ | |
| US10899603B2 (en) | Micromechanical z-inertial sensor | |
| JP5654904B2 (ja) | 静電容量型加速度センサ | |
| WO2009090841A1 (ja) | 静電容量型加速度センサ | |
| US9146254B2 (en) | Dynamic sensor | |
| CN105182002A (zh) | 微机械加速度传感器 | |
| JP2004233080A (ja) | 半導体加速度センサ | |
| JP2009270944A (ja) | 静電容量型加速度センサ | |
| JP2009300225A (ja) | 静電容量型加速度センサ | |
| US10598686B2 (en) | Micromechanical z-acceleration sensor | |
| JP2007033319A (ja) | 電気機械変換器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140704 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140715 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140902 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5700652 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |