JP2012135844A - 作業工具 - Google Patents
作業工具 Download PDFInfo
- Publication number
- JP2012135844A JP2012135844A JP2010290454A JP2010290454A JP2012135844A JP 2012135844 A JP2012135844 A JP 2012135844A JP 2010290454 A JP2010290454 A JP 2010290454A JP 2010290454 A JP2010290454 A JP 2010290454A JP 2012135844 A JP2012135844 A JP 2012135844A
- Authority
- JP
- Japan
- Prior art keywords
- side member
- driven
- magnet
- conductor
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 55
- 230000007246 mechanism Effects 0.000 claims abstract description 50
- 230000004907 flux Effects 0.000 claims abstract description 18
- 239000004020 conductor Substances 0.000 claims description 78
- 239000000696 magnetic material Substances 0.000 claims description 5
- 238000003754 machining Methods 0.000 claims 1
- 238000000034 method Methods 0.000 abstract description 4
- 238000000926 separation method Methods 0.000 description 11
- 230000008901 benefit Effects 0.000 description 4
- 229910000831 Steel Inorganic materials 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000005299 abrasion Methods 0.000 description 1
- 230000004308 accommodation Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B21/00—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
- B25F5/001—Gearings, speed selectors, clutches or the like specially adapted for rotary tools
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/14—Structural association with mechanical loads, e.g. with hand-held machine tools or fans
- H02K7/145—Hand-held machine tool
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/11—Structural association with clutches, brakes, gears, pulleys or mechanical starters with dynamo-electric clutches
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Details Of Spanners, Wrenches, And Screw Drivers And Accessories (AREA)
- Portable Power Tools In General (AREA)
Abstract
【課題】先端工具に駆動モータの動力を伝達するための動力伝達機構を有する作業工具において、動力伝達に係る磨耗の防止を図るのに有効な技術を提供する。
【解決手段】動力伝達機構131は、駆動モータによって回転駆動される駆動ギア133と、ドライバビット119を保持し、ドライバビット119の長軸方向に関し駆動ギア133から離間して配置され、且つ駆動ギア133との間で相対回転が許容されたスピンドル117と、駆動ギア133に設けられる磁石134と、スピンドル117に設けられ磁石134から所定距離を隔てて配置される導体137と、を含み、磁石134及び導体137が所定距離を隔てて配置された状態において、駆動ギア133に対する駆動ギア133の相対回転動作の際、磁石134の磁束に起因して導体137に渦電流が流れることで、駆動ギア133からスピンドル117に動力が伝達される。
【選択図】図2
【解決手段】動力伝達機構131は、駆動モータによって回転駆動される駆動ギア133と、ドライバビット119を保持し、ドライバビット119の長軸方向に関し駆動ギア133から離間して配置され、且つ駆動ギア133との間で相対回転が許容されたスピンドル117と、駆動ギア133に設けられる磁石134と、スピンドル117に設けられ磁石134から所定距離を隔てて配置される導体137と、を含み、磁石134及び導体137が所定距離を隔てて配置された状態において、駆動ギア133に対する駆動ギア133の相対回転動作の際、磁石134の磁束に起因して導体137に渦電流が流れることで、駆動ギア133からスピンドル117に動力が伝達される。
【選択図】図2
Description
本発明は、先端工具に駆動モータの動力を伝達するための動力伝達機構を有する作業工具に関する。
従来、例えば下記特許文献1には、この種の作業工具として、ネジ締めに用いるネジ締め機(スクリュドライバ)が開示されている。このネジ締め機の動力伝達機構は、駆動モータによって回転駆動される駆動側部材と、先端工具に連結された被動側部材とが、噛み合い式のクラッチによって係合することで駆動モータの動力が先端工具に伝達されるように構成されている。
特許文献1に開示のネジ締め機は、駆動側部材と被動側部材とが互いに接触することによってトルク伝達が生じる動力伝達機構を採用しているため、クラッチの入り切りによる半クラッチ状態によってクラッチプレートの磨耗が生じるという問題が懸念される。
そこで、ネジ締め機をはじめとしたこの種の作業工具の設計に際しては、駆動モータと先端工具との間の動力伝達部分の磨耗を防止するのに有効な技術が要請される。
そこで、ネジ締め機をはじめとしたこの種の作業工具の設計に際しては、駆動モータと先端工具との間の動力伝達部分の磨耗を防止するのに有効な技術が要請される。
本発明は、上記の点に鑑みてなされたものであり、先端工具に駆動モータの動力を伝達するための動力伝達機構を有する作業工具において、動力伝達に係る磨耗の防止を図るのに有効な技術を提供することを目的とする。
上記課題を解決するため、請求項にかかる本発明の作業工具が構成される。
本発明の形態の作業工具は、先端工具を介して被加工材に対し所定の加工作業を行う作業工具であって、その構成要素として、少なくとも駆動モータと動力伝達機構を有する。先端工具は、当該作業工具の一構成要素とされてもよいし、或いは当該作業工具とは別個の構成要素とされてもよい。駆動モータは、電動式或いはエア駆動式のモータとして構成される。動力伝達機構は、駆動モータの動力を先端工具に伝達するための機構として構成される。この動力伝達機構は、更に駆動側部材、被動側部材、磁石及び導体を含む。駆動側部材は、駆動モータによって回転駆動される部材として構成される。被動側部材は、先端工具を保持し、先端工具の長軸方向に関し駆動側部材から離間して配置され、且つ駆動側部材との間で相対回転が許容された部材として構成される。磁石は、駆動側部材と被動側部材のうちのいずれか一方に設けられる。導体は、駆動側部材と被動側部材のうちの他方に設けられ、磁石から所定距離を隔てて配置される。即ち、磁石が駆動側部材に設けられ、且つ導体が被動側部材に設けられる態様や、磁石が被動側部材に設けられ、且つ導体が駆動側部材に設けられる態様が包含される。
そして、磁石及び導体が所定距離を隔てて配置された状態において、被動側部材に対する駆動側部材の相対回転動作の際、磁石の磁束に起因して導体に渦電流が流れることで、駆動側部材から被動側部材に動力が伝達される。このような構成によれば、駆動側部材から被動側部材に動力が伝達される際に、これら駆動側部材と被動側部材は互いに離間状態とされて接触を伴わないため(非接触状態であるため)、動力伝達に係る磨耗の発生を確実に防止することができる。また、駆動側部材と被動側部材とが非接触状態であるため、駆動側部材と被動側部材との間の芯ずれについて、駆動側部材及び被動側部材を同軸上に直に連結する作業工具に要求されるような高度な寸法精度が必要ないという利点を有する。
本発明の更なる形態の作業工具では、導体が非磁性体として構成されるのが好ましい。また、駆動側部材及び前記被動側部材は、先端工具の長軸方向に相対移動可能とされ、且つ互いに離間する方向に付勢される構成であるのが好ましい。このような構成によれば、導体が非磁性体であるため、被動側部材が駆動側部材に近接する動作に対して、導体と磁石との吸引作用が影響を及ぼすことがない。また、駆動側部材及び前記被動側部材を、駆動側部材から被動側部材への動力伝達が解除された位置に容易に設定することが可能となる。
本発明の更なる形態の作業工具は、当該作業工具がネジ締め作業に用いるネジ締め機として構成されるのが好ましい。動力伝達機構は、更に支持機構及び付勢機構を備える構成であるのが好ましい。支持機構は、被動側部材が駆動側部材に対して先端工具の長軸方向に移動可能となるように被動側部材を支持する機能を果たす。付勢機構は、駆動側部材と被動側部材とが互いに離間するような付勢力を生じる機能を果たす。本構成において、被動側部材は、ネジ締め作業時に付勢機構の付勢力に抗して先端工具とともに駆動側部材に近接する方向に押し込まれることによって、磁石及び導体が所定距離を隔てて配置された状態が形成される。これにより、各種の作業工具のうち、特にネジ締め作業に用いるネジ締め機に好適な動力伝達機構が実現される。
本発明の更なる形態の作業工具では、駆動側部材は、駆動モータのモータ軸に直に連結され、被動側部材は、先端工具に直に連結された出力軸を構成し、またモータ軸と出力軸とが同軸上に配置された構成であるのが好ましい。また、被動側部材は、磁石及び導体が所定距離を隔てて配置された状態が常時に形成されるように、駆動側部材から離間して配置された構成であるのが好ましい。これにより、各種の作業工具のうち、特に被加工材の研削作業や研磨作業或いは切断作業等を行うダイグラインダに好適な動力伝達機構が実現される。
本発明によれば、先端工具に駆動モータの動力を伝達するための動力伝達機構を有する作業工具において、動力伝達に係る磨耗を防止することが可能となった。
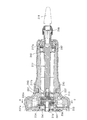
以下、本発明にかかる作業工具の実施形態につき、図面を参照しつつ詳細に説明する。本実施形態は、作業工具の一例として、ネジ締め作業を行うのに使用する電動式のスクリュドライバについて説明する。図1には、本実施の形態の電動スクリュドライバ101(「ネジ締め機」ともいう)の全体構成が示されており、また図2には、図1中のA領域の部分拡大図が示されている。
図1に示すように、電動スクリュドライバ101は、概括的に見て、本体部103、ハンドグリップ109、ドライバビット119を主体として構成される。本体部103は、電動スクリュドライバ101の作業工具本体を構成している。ハンドグリップ109は、本体部103を挟んでドライバビット119の反対側に連接され、作業者が把持するハンドル部分として構成される。ドライバビット119は、本体部103の先端領域(図1中の右側)にスピンドル117を介して着脱自在に取り付けされる長尺状の工具(先端工具)として構成される。このドライバビット119は、電動スクリュドライバ101の一構成要素とされてもよいし、或いは電動スクリュドライバ101とは別個の構成要素とされてもよい。ここでいうドライバビット119が、本発明における「先端工具」に相当する。
なお、本実施の形態では、便宜上、電動スクリュドライバ101のうちのドライバビット119側を、作業工具或いは当該作業工具の構成要素の「前側」ないし「前方側」として規定し、ハンドグリップ109側を、作業工具或いは当該作業工具の構成要素の「後側」ないし「後方側」として規定する。また、図1中の左右方向をドライバビット119の長軸方向として規定する。
本体部103は、モータハウジング105及びギアハウジング107を主体として構成される。モータハウジング105は、少なくとも駆動モータ(「電動モータ」ともいう)111を収容するハウジング(収容体)として構成される。駆動モータ111は、ハンドグリップ109に設けられたトリガ109aの作業者による操作によって駆動される。具体的には、トリガ109aが引き操作されると駆動モータ111が通電制御によって駆動され、当該引き操作が解除されることによって駆動モータ111が駆動停止される。ここでいう駆動モータ111が、本発明における「駆動モータ」に相当する。ギアハウジング107は、少なくとも動力伝達機構131を収容するハウジング(収容体)として構成される。また、本体部103の前方側の端部には、ドライバビット119によるネジ込み深さを規定するロケータ123が設けられている。
図2に示すように、スピンドル117は、径方向についてのラジアル荷重を受ける軸受121を介して、ドライバビット119の長軸方向に相対移動可能に、且つ、ドライバビット119の長軸周りに回転自在にギアハウジング107に取り付けられている。即ち、軸受121は、被動側部材を構成するスピンドル117がドライバビット119の長軸方向に移動可能となるようにスピンドル117を支持する機能を少なくとも果たす。従って、ここでいう軸受121が本発明における「支持機構」を構成する。
スピンドル117の前方側の前端部117aには、ドライバビット119が挿入されるビット挿入孔117bが設けられている。このビット挿入孔117bに挿入されたドライバビット119は、その外径が相対的に縮径された細径部119aを備え、この細径部119aに対しリング状のリーフスプリング(図示省略)で付勢された鋼球(スチールボール)118が径方向について係合することによって、当該ドライバビット119が保持される。ここでいうスピンドル117は、ドライバビット119を保持する機能を有し、本発明における「被動側部材」を構成する。
動力伝達機構131は、駆動モータ111の回転出力をスピンドル117及びドライバビット119に伝達する機能と、当該伝達を遮断するクラッチとしての機能を果たす。この動力伝達機構131は、図2に示すように、駆動ギア133、磁石134、駆動軸135、スピンドル117、導体137及びコイルバネ139を主体として構成されている。ここでいう動力伝達機構131が、本発明における「動力伝達機構」に相当する。
駆動ギア133は、スピンドル117の後方側の後端部117cに対向するとともに、長尺状の駆動軸135と回転方向に一体状に構成されており、駆動モータ111のモータ軸115に噛み合うことによって、駆動軸135周りに回転駆動される。この駆動ギア133に対しては、スピンドル117は、ドライバビット119の長軸方向に関し駆動ギア133から離間して配置され、且つ駆動ギア133との間で相対回転が許容されている。ここでいう駆動ギア133及び駆動軸135は、駆動モータ111によって回転駆動される駆動側部材であり、本発明における「駆動側部材」を構成する。
駆動ギア133は、ドライバビット119の長軸方向(駆動軸135の長軸方向としても規定される)についてのスラスト荷重を受ける軸受141,142を介して相対回転自在に軸支されている。また、この駆動ギア133は、スピンドル117の後端部117cと対向する対向面133aを有し、この対向面133aに複数の磁石(「永久磁石」ともいう)134が埋設されている。各磁石134は、その前方側の端面が駆動ギア133の対向面133aと面一状となるように配設されている。ここでいう磁石134が、本発明における「磁石」に相当する。
駆動軸135は、ドライバビット119と同一軸上に延在する構成とされる。この駆動軸135の前方側の前端部135aは、径方向のラジアル荷重を受ける軸受143を介して相対回転自在に軸支され、また後方側の後端部135bは、径方向のラジアル荷重を受ける軸受144を介して相対回転自在に軸支されている。
導体137は、スピンドル117の後端部117cの周りに一体状に取り付けられている。本実施の形態では、この導体137が磁石134から離間して配置される。この導体137は、典型的には、アルミニウムや銅を含む非磁性体として構成され、駆動ギア133の対向面133aに向かい合う対向面137aを有する。導体137を非磁性体として構成することで、スピンドル117がその押し込み動作に伴って駆動ギア133に近接する動作に対して、当該導体137と磁石134との吸引作用が影響を及ぼすことがない。ここでいう導体137が、本発明における「導体」に相当する。
コイルバネ139は、駆動軸135周りに配設されて、スピンドル117の後端部117c内に形成されたバネ収容孔117dに駆動軸135とともに収容されている。このコイルバネ139は、ドライバビット119の長軸方向に関しスピンドル117と駆動ギア133とが互いに離間するような付勢力(弾性付勢力)を生じる圧縮コイルバネとしての機能を果たす。このため、コイルバネ139のうち前方側の前端部139aはスピンドル117側に取り付けられ、後方側の後端部139bは、軸受142を挟んで駆動ギア133とは反対側に配設されたストッパ145に取り付けられている。ここでいうコイルバネ139が、本発明における「付勢機構」を構成する。
また、このコイルバネ139は、スピンドル117が駆動ギア133に近接した位置(「押し込み位置」ともいう)と、スピンドル117が駆動ギア133から離間した位置(「押し込み解除位置」ないし「押し込み動作前の初期位置」ともいう)との間で伸縮動作される。即ち、スピンドル117は、ドライバビット119の押し込み動作時においては、コイルバネ139の弾性付勢力に抗してドライバビット119とともに駆動ギア133に近接する方向に押し込まれ、その後端部117cが駆動ギア133側の停止部分であるストッパ145に当接する。これにより、駆動ギア133の対向面133a、即ち磁石134の端面と導体137の対向面137aとの間の最小離間距離d1(押し込み位置での離間距離)が規定される。ここでいう最小離間距離d1が、本発明における「所定距離」に相当する。一方、スピンドル117は、ドライバビット119の押し込み解除動作時においては、その後端部117cまわりに設けられている導体137がギアハウジング107側の停止部分であるストッパ108に当接する。これにより、駆動ギア133の対向面133a、即ち磁石134の端面と導体137の対向面137aとの間の最大離間距離d2(押し込み解除位置での離間距離)が規定される。
上記構成の駆動ギア133における磁石134の数及び配置態様については、図2中のB−B線に関する断面構造を示す図3が参照される。図3に示すように、駆動ギア133の円形状の対向面133aには、当該対向面133aの周方向に等間隔で複数(図3に示す形態では12個)の磁石134が埋設されている。本実施の形態では特に、対向面133a側がN極の磁石134(図3中の「N」で示される磁石)と対向面133a側がS極の磁石134(図3中の「S」で示される磁石)とが交互に配置されている。このような構成によれば、駆動ギア133に対する導体137の回転動作の円滑化を図ることが可能となる。なお、磁石134の数や配置態様に関しては、必要に応じて適宜の変更が可能である。例えば、対向面133a側がN極或いはS極の1〜11個の磁石134や、13個以上の磁石134を駆動ギア133に設ける構成を採用することもできる。
上記構成の電動スクリュドライバ101の動作については、図2及び図4が参照される。図2に示す状態は、ネジ締め作業を行っていない初期状態とされる。この初期状態では、スピンドル117がコイルバネ139の弾性付勢力によって前方側へと移動している。この場合には、駆動ギア133の回転出力はスピンドル117に伝達されない。その後、トリガ109aの引き操作によって駆動モータ111が駆動された際には、駆動モータ111のモータ軸115を介して駆動ギア133が回転駆動されるものの、導体137の対向面137aが駆動ギア133側の磁石134から前述の最大離間距離d2で離間しているため、磁石134の磁束に起因して導体137を回転駆動させるだけの荷重は発生しておらず、スピンドル117は回転駆動されない状態、即ち電動スクリュドライバ101のアイドリング状態となる。
このアイドリング状態において、実際にネジ締め作業を行うべく本体部103を前方(被加工材側)へと移動させ、作業者による押圧力によってドライバビット119に装着したネジ(図示省略)を被加工材に押し付けると、スピンドル117は、コイルバネ139の弾性付勢力に抗して駆動ギア133側へとドライバビット119とともに一体状に押し込まれる。即ち、スピンドル117は、本体部103及び駆動ギア133に対して図2中の左側へと相対的に後退動作し、所定の押し込み位置まで移動する。
図4には、図1中のA領域の部分拡大図であって、ネジ締め作業時の状態を示している。図4に示すこの状態は、スピンドル117がドライバビット119の押し込み動作に伴って駆動ギア133に近接し、前述の押し込み位置に設定された状態とされる。この状態では、スピンドル117の後端部117cが駆動ギア133側のストッパ145に当接することによって、駆動ギア133に対するスピンドル117のそれ以上の近接動作が阻止される。このとき、導体137の対向面137aは、駆動ギア133側の磁石134から前述の最小離間距離d1で離間する。この最小離間距離d1は、動力伝達機構131での所望の形態の動力伝達を達成するべく、磁石134の数や種類、導体137の材質等に応じて適宜に設定されるのが好ましい。
このスピンドル117が押し込み位置に設定された状態或いは押し込み位置まで移動する過程においては、磁石134の磁束に起因して導体137に渦電流が流れることに当該導体137を回転駆動させるだけの荷重が発生し、回転駆動状態の駆動ギア133の動力がスピンドル117へと伝達される動力伝達がなされる。この動力伝達は、駆動ギア133側の磁石134を導体137の対向面137aに沿って回転させて、導体137を磁石134の回転方向に回転させることによって生じるものであり、いわゆる「アラゴの円盤」の原理を用いたものである。
具体的には、磁石134及び導体137が最小離間距離d1を隔てて配置された状態において、磁石134の回転によって導体137上を磁束が移動して、当該磁束が導体137を貫くことになるので、第1段階として、導体137にはフレミングの右手の法則に基づいて当該磁束に起因した誘導起電力が発生し、導体137に渦電流が流れる。導体137に渦電流が流れると、第2段階として、フレミングの左手の法則で渦電流と磁石134の磁束との間に導体137をその接線方向に引っ張る電磁力が発生し、これにより導体137は磁石134に引っ張られて、スピンドル117とともに磁石134の移動方向に回転することになる。なお、この際、前記の誘導起電力は導体137上を磁束が移動して当該磁束が導体137を貫く場合に発生するので、駆動軸135を中心とした導体137及びスピンドル117の回転速度は、磁石134及び駆動ギア133の回転速度よりも遅くなる。かくして、駆動モータ111の回転出力が、動力伝達機構131を介してスピンドル117及びドライバビット119に伝達され、回転駆動されたドライバビット119によって実際のネジ締め作業が遂行されることとなる。
一方で、ネジ締め作業が終了して、ドライバビット119によるネジの押し付け動作が解除されると、スピンドル117は、コイルバネ139の弾性付勢力にしたがって駆動ギア133から離間する方向へとドライバビット119とともに一体状に移動する。即ち、スピンドル117は、本体部103に対して図2中の右側へと相対的に前進動作し、所定の押し込み解除位置まで移動し、再び図2に示す状態に復帰する。図2に示すこの復帰状態では、導体137がギアハウジング107側のストッパ108に当接することによって、駆動ギア133に対するスピンドル117のそれ以上の離間動作が阻止される。
スピンドル117が押し込み解除位置まで移動する過程においては、回転駆動状態の駆動ギア133の動力がスピンドル117へと伝達される動力伝達の解除がなされる。この動力伝達の解除は、スピンドル117が駆動ギア133から離間するにつれて導体137に対する磁石134の磁束の影響が弱まることによって生じる。かくして、駆動モータ111の回転出力が、動力伝達機構131を介してスピンドル117及びドライバビット119に伝達される動作が解除されて、前述の電動スクリュドライバ101のアイドリング状態となる。このように、本実施形態では、コイルバネ139の弾性付勢力を用いることによって、駆動ギア133及びスピンドル117を、駆動ギア133からスピンドル117への動力伝達が解除された位置に容易に設定することが可能となる。更に、トリガ109aの引き操作が解除されることによって駆動モータ111が駆動停止される。
上記構成の動力伝達機構131によれば、駆動側部材を構成する駆動ギア133から被動側部材を構成するスピンドル117に動力が伝達される際に、これら駆動側部材と被動側部材は互いに離間状態とされて接触を伴わないため(非接触状態であるため)、動力伝達に係る磨耗の発生を確実に防止することができる。また、駆動側部材を構成する駆動ギア133と被動側部材を構成するスピンドル117とが非接触状態であるため、駆動側部材と被動側部材との間の芯ずれについて、駆動側部材及び被動側部材を同軸上に直に連結する作業工具に要求されるような高度な寸法精度が必要ないという利点を有する。また、各種の作業工具のうち、特にネジ締め作業に用いるネジ締め機に好適な動力伝達機構を実現することができる。
上記実施の形態では、作業工具として電動スクリュドライバ101に本発明を適用する場合について記載したが、電動スクリュドライバ以外の作業工具に本発明を適用することもできる。別実施の形態の作業工具の一例については、図5〜図7が参照される。図5には、別実施の形態の作業工具の一例として、被加工材の研削作業や研磨作業或いは切断作業等(「グラインダ作業」ともいう)を行うのに使用する電動式のグラインダ201(「ダイグラインダ」ともいう)の全体構成が示され、図6には、図5中のC領域の部分拡大図が示されている。また、図7には、図6中のD−D線に関する断面構造が示されている。
図5に示すように、電動ダイグラインダ201は、概括的に見て、本体部203、砥石219を主体として構成される。本体部203は、電動ダイグラインダ201の作業工具本体を構成している。砥石219は、本体部203の先端領域(図5中の右側)にスピンドル217を介して着脱自在に取り付けされる長尺状の工具(先端工具)として構成される。この砥石219は、電動ダイグラインダ201の一構成要素とされてもよいし、或いは電動ダイグラインダ201とは別個の構成要素とされてもよい。ここでいう砥石219が、本発明における「先端工具」に相当する。
本体部203は、モータハウジング205及びギアハウジング207を主体として構成される。モータハウジング205は、少なくとも駆動モータ(「電動モータ」ともいう)211を収容するハウジング(収容体)として構成される。このモータハウジング205は、その外面が作業者によって把持されるグリップ部としての機能も併せ持つ。ギアハウジング207は、少なくとも動力伝達機構231を収容するハウジング(収容体)として構成される。ここでいう駆動モータ211が、本発明における「駆動モータ」に相当する。
スピンドル217は、ギアハウジング207に砥石219の長軸周りに回転自在に取り付けられている。このスピンドル217には、その前方側に砥石219を締め付け固定する固定部材218が設けられている。このスピンドル217は、砥石219を保持する機能を有し、且つ砥石219に直に連結された出力軸を構成している。また、本実施の形態では、このスピンドル217が駆動モータ211のモータ軸215と同軸上に配置されている。従って、ここでいうスピンドル217が、本発明における「被動側部材」及び「出力軸」に相当する。
動力伝達機構231は、駆動モータ211の回転出力をスピンドル217及び砥石219に伝達する機能を果たす。図6に示すように、この動力伝達機構231は、駆動体233、磁石234、スピンドル217及び導体237を主体として構成されている。ここでいう動力伝達機構231が、本発明における「動力伝達機構」に相当する。
駆動体233は、スピンドル217の後方側において、当該スピンドル217から離間して配置されている。この駆動体233は、モータ軸215に直に連結されており、モータ軸215周りに回転駆動される。また、この駆動体233は、径方向についてのラジアル荷重を受ける軸受241を介して相対回転自在に軸支されている。この駆動体233の前方側には、導体237と対向する対向面233aが形成され、この対向面233aには、前述の磁石134と同様の磁石234が複数埋設されている。各磁石234は、その前方側の端面が駆動体233の対向面233aと面一状となるように構成されている。
導体237は、スピンドル217の後方側の後端部217bに一体状に設けられている。この導体237は、前述の導体137と同様に、典型的には、アルミニウムや銅を含む非磁性体として構成され、駆動体233の対向面233aに向かい合う対向面237aを有する。ここでいう導体237が、本発明における「導体」に相当する。一方で、後端部217bに導体237が一体化されたスピンドル217は、その前方側の前端部217aが径方向のラジアル荷重を受ける軸受242を介して、またその後端部217bが径方向のラジアル荷重を受ける軸受243を介して相対回転自在に軸支されている。上記構成により、スピンドル217は、磁石234及び導体237が、前述の最小離間距離d1と同様の所定距離を隔てて配置された状態が常時に形成されるように、駆動体233から離間して配置されることとなる。
上記構成の駆動体233における磁石234の数及び配置態様については、図7が参照されるように、駆動体233の円形状の対向面233aに、当該対向面233aの周方向に等間隔で複数(図7に示す形態では8個)の磁石234が埋設されている。本実施の形態では特に、対向面233a側がN極の磁石234(図7中の「N」で示される磁石)と対向面233a側がS極の磁石234(図7中の「S」で示される磁石)とが交互に配置されている。このような構成によれば、駆動体233に対する導体237の回転動作の円滑化を図ることが可能となる。なお、磁石234の数や配置態様に関しては、必要に応じて適宜の変更が可能である。例えば、対向面233a側がN極或いはS極の1〜7個の磁石234や、9個以上の磁石234を駆動体233に設ける構成を採用することもできる。
上記構成の電動ダイグラインダ201の動作については、図6が参照される。図6に示すように、この電動ダイグラインダ201では、導体237の対向面237aと駆動体233の対向面233a(磁石234の端面)とが常時に所定の離間距離を隔てて配置されており、既に図4に示す前述の実施形態と同様に、駆動体233の動力がスピンドル217へと伝達可能な状態が形成されている。従って、実際にグラインダ作業を行うべく操作部材(図示省略)に操作によって駆動モータ211が駆動された際には、回転駆動状態の駆動体233の動力がスピンドル217へと伝達される動力伝達がなされる。この動力伝達は、駆動体233側の磁石234を導体237の対向面237aに沿って回転させて、導体237を磁石234の回転方向に回転させることによって生じるものである。
具体的には、磁石234の回転によって導体237上を磁束が移動して、当該磁束が導体237を貫くことになるので、第1段階として、導体237にはフレミングの右手の法則に基づいて当該磁束に起因した誘導起電力が発生し、導体237に渦電流が流れる。導体237に渦電流が流れると、第2段階として、フレミングの左手の法則で渦電流と磁石234の磁束との間に導体237をその接線方向に引っ張る電磁力が発生し、これにより導体237は磁石134に引っ張られて、スピンドル117とともに磁石234の移動方向に回転することになる。なお、この際、前記の誘導起電力は導体237上を磁束が移動して当該磁束が導体237を貫く場合に発生するので、駆動軸235を中心とした導体237及びスピンドル217の回転速度は、磁石234及び駆動体233の回転速度よりも遅くなる。かくして、駆動モータ211の回転出力が、動力伝達機構231を介してスピンドル217及び砥石219に伝達され、回転駆動された砥石219によって実際のグラインダ作業が遂行されることとなる。
一方で、グラインダ作業が終了して、駆動モータ211が駆動停止された場合には、ドライバビット217に対する駆動体233の相対回転動作、即ち導体237に対する磁石234の相対回転動作が停止されることによって、駆動体233からスピンドル217への動力伝達が停止される。
上記構成の動力伝達機構231によれば、駆動側部材を構成する駆動体233から被動側部材を構成するスピンドル217に動力が伝達される際に、これら駆動側部材と被動側部材は互いに離間状態とされて接触を伴わないため、動力伝達に係る磨耗の発生を確実に防止することができる。また、駆動側部材を構成する駆動体233と被動側部材を構成するスピンドル217とが非接触状態であるため、駆動側部材と被動側部材との間の芯ずれについて、駆動側部材及び被動側部材を同軸上に直に連結する作業工具に要求されるような高度な寸法精度が必要ないという利点を有する。また、各種の作業工具のうち、特に被加工材の研削作業や研磨作業或いは切断作業等を行うダイグラインダに好適な動力伝達機構を実現することができる。
〔他の実施形態〕
なお、本発明は上記の実施の形態のみに限定されるものではなく、種々の応用や変形が考えられる。例えば、上記実施の形態を応用した次の各形態を実施することもできる。
なお、本発明は上記の実施の形態のみに限定されるものではなく、種々の応用や変形が考えられる。例えば、上記実施の形態を応用した次の各形態を実施することもできる。
上記実施の形態の動力伝達機構113,213では、駆動側部材に磁石を配置する一方、被動側部材に導体を配置する場合について記載したが、本発明では、駆動側部材に導体を配置する一方、被動側部材に磁石を配置する構成を採用することもできる。
また、上記実施の形態では、導体137,237を非磁性体として構成する場合について記載したが、必要に応じては当該導体を磁性体として構成することもできる。
また、上記実施の形態では、電動スクリュドライバ又は電動ダイグラインダの動力伝達機構に本発明を適用する場合について記載したが、これらの作業工具以外で、駆動モータの動力を先端工具に伝達するための動力伝達機構を有する作業工具に、本発明を適用することもできる。この場合、駆動モータは電動式以外に、エア駆動式のモータとして構成されてもよい。
101 電動スクリュドライバ
103 本体部
105 モータハウジング
107 ギアハウジング
108 ストッパ
109 ハンドグリップ
109a トリガ
110 駆動モータ
111 駆動モータ
115 モータ軸
117 スピンドル
117a 前端部
117b ビット挿入孔
117c 後端部
117d バネ収容孔
118 鋼球
119 ドライバビット
119a 細径部
121 軸受
123 ロケータ
131 動力伝達機構
133 駆動ギア
133a 対向面
134 磁石
135 駆動軸
135a 前端部
135b 後端部
137 導体
137a 対向面
139 コイルバネ
139a 前端部
139b 後端部
141,142,143,144 軸受
145 ストッパ
201 電動ダイグラインダ
203 本体部
205 モータハウジング
205 ギアハウジング
211 駆動モータ
217 スピンドル
217a 前端部
217b 後端部
218 固定部材
219 砥石
231 動力伝達機構
233 駆動体
233a 対向面
234 磁石
237 導体
237a 対向面
241,242,243 軸受
103 本体部
105 モータハウジング
107 ギアハウジング
108 ストッパ
109 ハンドグリップ
109a トリガ
110 駆動モータ
111 駆動モータ
115 モータ軸
117 スピンドル
117a 前端部
117b ビット挿入孔
117c 後端部
117d バネ収容孔
118 鋼球
119 ドライバビット
119a 細径部
121 軸受
123 ロケータ
131 動力伝達機構
133 駆動ギア
133a 対向面
134 磁石
135 駆動軸
135a 前端部
135b 後端部
137 導体
137a 対向面
139 コイルバネ
139a 前端部
139b 後端部
141,142,143,144 軸受
145 ストッパ
201 電動ダイグラインダ
203 本体部
205 モータハウジング
205 ギアハウジング
211 駆動モータ
217 スピンドル
217a 前端部
217b 後端部
218 固定部材
219 砥石
231 動力伝達機構
233 駆動体
233a 対向面
234 磁石
237 導体
237a 対向面
241,242,243 軸受
Claims (4)
- 駆動モータと、前記駆動モータの動力を先端工具に伝達するための動力伝達機構とを有し、前記先端工具を介して被加工材に対し所定の加工作業を行う作業工具であって、
前記動力伝達機構は、
前記駆動モータによって回転駆動される駆動側部材と、
前記先端工具を保持し、前記先端工具の長軸方向に関し前記駆動側部材から離間して配置され、且つ前記駆動側部材との間で相対回転が許容された被動側部材と、
前記駆動側部材と前記被動側部材のうちのいずれか一方に設けられる磁石と、
前記駆動側部材と前記被動側部材のうちの他方に設けられ、前記磁石から所定距離を隔てて配置される導体と、を含み、
前記磁石及び前記導体が前記所定距離を隔てて配置された状態において、前記被動側部材に対する前記駆動側部材の相対回転動作の際、前記磁石の磁束に起因して前記導体に渦電流が流れることで、前記駆動側部材から前記被動側部材に動力が伝達される構成であることを特徴とする作業工具。 - 請求項1に記載の作業工具であって、
前記導体が非磁性体として構成され、前記駆動側部材及び前記被動側部材は、前記先端工具の長軸方向に相対移動可能とされ、且つ互いに離間する方向に付勢されていることを特徴とする作業工具。 - 請求項1又は2に記載の作業工具であって、
当該作業工具がネジ締め作業に用いるネジ締め機として構成され、
前記動力伝達機構は、更に、前記被動側部材が前記駆動側部材に対して前記先端工具の長軸方向に移動可能となるように前記被動側部材を支持する支持機構と、前記駆動側部材と前記被動側部材とが互いに離間するような付勢力を生じる付勢機構を備え、
前記被動側部材は、ネジ締め作業時に前記付勢機構の付勢力に抗して前記先端工具とともに前記駆動側部材に近接する方向に押し込まれることによって、前記磁石及び前記導体が前記所定距離を隔てて配置された状態が形成されることを特徴とする作業工具。 - 請求項1に記載の作業工具であって、
前記駆動側部材は、前記駆動モータのモータ軸に直に連結され、前記被動側部材は、前記先端工具に直に連結された出力軸を構成し、また前記モータ軸と前記出力軸とが同軸上に配置された構成であり、
前記被動側部材は、前記磁石及び前記導体が前記所定距離を隔てて配置された状態が常時に形成されるように、前記駆動側部材から離間して配置された構成であることを特徴とする作業工具。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010290454A JP2012135844A (ja) | 2010-12-27 | 2010-12-27 | 作業工具 |
| PCT/JP2011/078961 WO2012090711A1 (ja) | 2010-12-27 | 2011-12-14 | 作業工具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010290454A JP2012135844A (ja) | 2010-12-27 | 2010-12-27 | 作業工具 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012135844A true JP2012135844A (ja) | 2012-07-19 |
Family
ID=46382824
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010290454A Pending JP2012135844A (ja) | 2010-12-27 | 2010-12-27 | 作業工具 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2012135844A (ja) |
| WO (1) | WO2012090711A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018154903A1 (ja) * | 2017-02-24 | 2018-08-30 | パナソニックIpマネジメント株式会社 | 電動工具 |
| WO2019064724A1 (ja) * | 2017-09-26 | 2019-04-04 | パナソニックIpマネジメント株式会社 | 電動工具 |
| JP2021035721A (ja) * | 2020-12-04 | 2021-03-04 | パナソニックIpマネジメント株式会社 | 電動工具 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3501753B1 (en) | 2017-12-21 | 2021-03-31 | Guido Valentini | Hand guided and/or hand held electric or pneumatic power tool |
| JP2019147223A (ja) * | 2018-02-27 | 2019-09-05 | 株式会社マキタ | スクリュードライバ |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2721768B2 (ja) * | 1992-03-12 | 1998-03-04 | リョービ株式会社 | バッテリー式スクリュードライバー |
| JPH09254046A (ja) * | 1996-03-26 | 1997-09-30 | Matsushita Electric Works Ltd | 電動ドライバー |
| JP2004291136A (ja) * | 2003-03-26 | 2004-10-21 | Matsushita Electric Works Ltd | 磁気インパクト工具 |
| JP2006105210A (ja) * | 2004-10-01 | 2006-04-20 | Usui Kokusai Sangyo Kaisha Ltd | 渦電流式カップリング装置 |
| JP2006162047A (ja) * | 2004-12-10 | 2006-06-22 | Usui Kokusai Sangyo Kaisha Ltd | マグネット式ファンクラッチの制御方法 |
| JP5032777B2 (ja) * | 2006-02-23 | 2012-09-26 | パナソニック株式会社 | トルク伝達装置 |
-
2010
- 2010-12-27 JP JP2010290454A patent/JP2012135844A/ja active Pending
-
2011
- 2011-12-14 WO PCT/JP2011/078961 patent/WO2012090711A1/ja active Application Filing
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018154903A1 (ja) * | 2017-02-24 | 2018-08-30 | パナソニックIpマネジメント株式会社 | 電動工具 |
| JP2018140446A (ja) * | 2017-02-24 | 2018-09-13 | パナソニックIpマネジメント株式会社 | 電動工具 |
| WO2019064724A1 (ja) * | 2017-09-26 | 2019-04-04 | パナソニックIpマネジメント株式会社 | 電動工具 |
| JP2019058970A (ja) * | 2017-09-26 | 2019-04-18 | パナソニックIpマネジメント株式会社 | 電動工具 |
| JP2021035721A (ja) * | 2020-12-04 | 2021-03-04 | パナソニックIpマネジメント株式会社 | 電動工具 |
| JP7122666B2 (ja) | 2020-12-04 | 2022-08-22 | パナソニックIpマネジメント株式会社 | 電動工具 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012090711A1 (ja) | 2012-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2012090711A1 (ja) | 作業工具 | |
| JP6408870B2 (ja) | 電動工具 | |
| US9360064B2 (en) | Power tool braking device | |
| US9079290B2 (en) | Portable machine tool | |
| US8319379B2 (en) | Portable electrical power tool | |
| JP2004291138A (ja) | 磁気インパクト工具 | |
| JP2012135845A (ja) | 作業工具 | |
| JP6403589B2 (ja) | 作業工具 | |
| US20090183887A1 (en) | Power hand tool system with universal flexible shaft and method of operating | |
| EP3656503B1 (en) | Hand-held and hand-guided random orbital polishing or sanding power tool | |
| EP2402117B1 (en) | Oil pulse rotary tool | |
| US9816572B2 (en) | Machine tool deceleration device | |
| JP2016144862A (ja) | 作業工具 | |
| CN110325324B (zh) | 电动工具 | |
| JP6952241B2 (ja) | 電動工具 | |
| JP5353380B2 (ja) | 電動工具 | |
| JP2019130623A (ja) | 電動工具 | |
| US9987716B2 (en) | Machine tool brake device | |
| JP2006130589A (ja) | 電動工具 | |
| CN101837558A (zh) | 一种五轴联动磨床的工件电磁夹紧装置 | |
| WO2013084554A1 (ja) | 電動工具 | |
| JP4537777B2 (ja) | 回転工具のクラッチ装置 | |
| JP2009072032A (ja) | 直流モータ及びこれを備えた電動工具 | |
| JP2019141989A (ja) | 作業工具 | |
| JP2010094782A (ja) | 電動切削研磨工具 |