JP2012133122A - 近接露光装置及びそのギャップ測定方法 - Google Patents
近接露光装置及びそのギャップ測定方法 Download PDFInfo
- Publication number
- JP2012133122A JP2012133122A JP2010285074A JP2010285074A JP2012133122A JP 2012133122 A JP2012133122 A JP 2012133122A JP 2010285074 A JP2010285074 A JP 2010285074A JP 2010285074 A JP2010285074 A JP 2010285074A JP 2012133122 A JP2012133122 A JP 2012133122A
- Authority
- JP
- Japan
- Prior art keywords
- mask
- substrate
- height
- gap
- work stage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 24
- 239000000758 substrate Substances 0.000 claims abstract description 169
- 238000006073 displacement reaction Methods 0.000 claims abstract description 46
- 238000009826 distribution Methods 0.000 claims abstract description 35
- 238000005259 measurement Methods 0.000 claims description 22
- 230000001678 irradiating effect Effects 0.000 claims description 11
- 239000000463 material Substances 0.000 claims description 7
- 238000012546 transfer Methods 0.000 claims description 6
- 238000012545 processing Methods 0.000 claims description 3
- 238000000691 measurement method Methods 0.000 claims description 2
- 239000011159 matrix material Substances 0.000 description 24
- 238000004519 manufacturing process Methods 0.000 description 8
- 238000009434 installation Methods 0.000 description 7
- 238000012423 maintenance Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000000873 masking effect Effects 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images






Landscapes
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
Abstract
【課題】自動的に基板上面の高さとマスク下面の高さとを測定して、基板とマスクとのギャップ分布を作業者のスキルに影響されることなく、精度よく求めることができる近接露光装置及びそのギャップ測定方法を提供する。
【解決手段】マスクステージ1側に配設されて基板上面の高さHwを測定するマスク側変位センサ31と、ワークステージ2側に配設されてマスク下面の高さHmを測定する基板側変位センサ15と、を備え、マスク側変位センサ31、及び基板側変位センサ15によってそれぞれ測定された基板上面の高さHwと、マスク下面の高さHmと、に基づいて、基板WとマスクMとのギャップ分布を求める。
【選択図】図1
【解決手段】マスクステージ1側に配設されて基板上面の高さHwを測定するマスク側変位センサ31と、ワークステージ2側に配設されてマスク下面の高さHmを測定する基板側変位センサ15と、を備え、マスク側変位センサ31、及び基板側変位センサ15によってそれぞれ測定された基板上面の高さHwと、マスク下面の高さHmと、に基づいて、基板WとマスクMとのギャップ分布を求める。
【選択図】図1
Description
本発明は、近接露光装置及びそのギャップ測定方法に関し、より詳細には、例えば液晶ディスプレイやプラズマディスプレイ等の大型のフラットパネルディスプレイ等の基板上にマスクのパターンを近接(プロキシミティ)露光転写するのに好適な近接露光装置及びそのギャップ測定方法に関する。
近接露光は、表面に感光剤を塗布した透光性の基板(被露光材)を近接露光装置のワークステージ上に保持すると共に、該基板をマスクステージのマスク保持枠に保持されたマスクに接近させて両者のギャップを、例えば数10μm〜数100μmにし、マスクの基板と反対側から照射装置によって露光用の光をマスクに向けて照射することにより基板上にマスクに描かれたパターンを露光転写するようにしたものである。
ところで、近接露光には、マスクを基板と同じ大きさにして一括で露光する方式があるが、このような方式では、大型基板上にマスクのパターンを露光転写する場合にマスクが大型化し、マスクの撓みによるパターン精度への影響やコスト面等で問題が生じる。このような事情から、従来においては、大型基板上にマスクのパターンを露光転写する場合には、基板より小さいマスクを用い、ワークステージをマスクに対して例えばY軸方向に相対的にステップ移動させてステップ毎にマスクを基板に近接して対向配置した状態でパターン露光光を照射し、これにより、マスクに描かれた複数のパターンを基板上に露光転写する、所謂ステップ式の近接露光方式が用いられる場合がある。
具体的には、まず、例えばワークステージ側のアライメントマークとマスク側のアライメントマークとが整合するようにマスクの位置を調整してワークステージとマスクの位置を合わせ、そのときのマスクの姿勢(位置)を記憶装置等に記憶しておく。次に、ワークステージに搭載した基板をマスクに接近させ、基板とマスクとを微小ギャップを介した状態で照射手段からパターン露光用の光をマスクに向けて照射してマスクパターンを基板に露光転写する。
次に、基板をマスクから離し、この状態でワークステージをマスクに対して1ステップ量だけ送る。このとき、例えばリニアガイド等の精度に起因してワークステージの送り誤差が生じる。従って、このままで次ステップ目の露光を行うと、基板上に形成される次ステップ目の露光パターンと第1ステップ目の露光パターンとの相対位置がずれてしまう。このため、次ステップの露光を行う前にレーザ干渉計等の光学的計測センサによってワークステージの送り誤差(位置ずれ)を検出し、該検出結果と上記記憶装置に記憶されたマスクの初期姿勢情報とに基づいてマスクの向きを補正して基板とマスクとの位置を整合させ、この状態で次ステップ目の露光を行うことにより、基板上の個々の露光パターンの相対位置にずれが生じないようにしている。
このような近接露光において、露光パターンを高精度で露光するためには、基板とマスクの位置精度と共に、基板とマスク間のギャップが重要な要素であり、各ショットにおける基板、マスク間のギャップを数10μm〜数100μmとし、且つ高い平行度を維持することが必要である。このため、近接露光装置の設置時や定期メンテナンス時には、基板、マスク間のギャップ分布を測定して、基板生産時において最適ギャップが維持できるように、各部を調整することが行われている。
従来のギャップ分布の測定方法としては、マスクステージに配置されたギャップセンサの移動可能範囲を大きくして、このギャップセンサを駆動機構によってストロークさせることでマスクの全エリアのギャップを測定する方法がある。
また、基板、マスク間のギャップに関する開示例として、ウェハチャツク及びマスクチャツクに取り付けた変位センサにより、基板とマスクとを平行、且つ所定間隔に設定するようにした第1及び第2の物体の間隔設定方法及び装置が開示されている(例えば、特許文献1参照。)。
しかしながら、マスクステージに配置したギャップセンサにより基板、マスク間のギャップ分布を測定するには、マスクの全エリアをカバーする必要があり、マスクが大型になるにつれてギャップセンサの移動範囲が広くなって、ギャップセンサを支持する駆動機構が大型となる。このため、検出精度が低下するばかりでなく、製造コストが増大する問題があった。
また、特許文献1の方法は、基板生産時においてギャップを設定するものであり、基板生産に先立つ近接露光装置の据え付け時やメンテナンス時のギャップ測定については考慮されていない。また、特許文献1は、ウェハを対象基板としており、フラットパネルディスプレイ用パネルを露光するような、基板より小さなマスクを用いる場合におけるギャップ測定に簡単に適用できるものではなかった。
本発明は、前述した課題に鑑みてなされたものであり、その目的は、基板とマスク間のギャップ分布を作業者のスキルに影響されることなく、自動的に求めることができる近接露光装置及びそのギャップ測定方法を提供することにある。
本発明の上記目的は、下記の構成により達成される。
(1) 被露光材としての基板を保持して移動可能なワークステージと、前記基板に対向配置されてマスクを保持可能なマスクステージと、前記基板に対してパターン露光用の光を前記マスクを介して照射する照射手段と、前記ワークステージを所定の方向に移動させるワークステージ駆動機構と、前記基板に対する前記マスクの位置を調整するマスク位置調整手段と、を備え、前記マスクと前記基板とを近接配置した状態で、前記マスクの露光パターンを前記照射手段によって前記基板に露光転写する近接露光装置であって、
前記マスクステージ側に設けられ前記基板上面の高さを測定するマスク側変位センサと、
前記ワークステージ側に設けられ前記マスク下面の高さを測定する基板側変位センサと、
前記マスク側変位センサにより測定された前記基板上面の複数の所定位置での高さと、前記基板側変位センサにより測定された前記マスク下面の複数の所定位置での高さに基づいて、前記基板と前記マスクとを互いに対向させた場合の任意位置におけるギャップを算出するギャップ算出手段と、
を備えることを特徴とする近接露光装置。
(2) 前記マスク側変位センサは、非接触式センサであることを特徴とする上記(1)に記載の近接露光装置。
(3) 前記ギャップ算出手段は、前記照射手段によりパターン露光用の光が照射される各ショットにおける前記基板上の複数の露光エリアごとに、前記ギャップを算出することを特徴とする上記(1)に記載の近接露光装置。
(4) 被露光材としての基板を保持して移動可能なワークステージと、前記基板に対向配置されてマスクを保持可能なマスクステージと、前記基板に対してパターン露光用の光を前記マスクを介して照射する照射手段と、前記ワークステージを所定の方向に移動させるワークステージ駆動機構と、前記基板に対する前記マスクの位置を調整するマスク位置調整手段と、前記マスクステージ側に設けられ前記基板上面の高さを測定するマスク側変位センサと、前記ワークステージ側に設けられ前記マスク下面の高さを測定する基板側変位センサと、を備え、前記マスクの露光パターンを前記照射手段によって前記基板に露光転写する近接露光装置の前記基板と前記マスクとのギャップ分布を測定するギャップ測定方法であって、
前記ワークステージ駆動機構により前記ワークステージを移動させて、前記マスク側変位センサで前記基板上面の複数の所定位置の高さを測定する工程と、
前記ワークステージ駆動機構により前記ワークステージを移動させて、前記基板側変位センサで前記マスク下面の複数の所定位置の高さを測定する工程と、
前記マスク側変位センサにより測定された前記基板上面の複数の所定位置での高さと、前記基板側変位センサにより測定された前記マスク下面の複数の所定位置での高さに基づいて、前記基板と前記マスクとを互いに対向させた場合の任意位置におけるギャップを算出する工程と、を備えることを特徴とする近接露光装置のギャップ測定方法。
(5) 前記ギャップ算出工程は、前記基板上面の複数の所定位置での高さ及び前記マスク下面の複数の所定位置での高さの測定値から、それぞれ直線補間により高さ測定位置以外の前記基板上面の高さ及び前記マスク下面の高さを求める補間処理工程を有すること特徴とする上記(4)に記載の近接露光装置のギャップ測定方法。
(6) 前記ギャップ算出工程は、前記照射手段によりパターン露光用の光が照射される各ショットにおける前記基板上の複数の露光エリアごとに、前記ギャップを算出することを特徴とする上記(4)に記載の近接露光装置のギャップ測定方法。
(1) 被露光材としての基板を保持して移動可能なワークステージと、前記基板に対向配置されてマスクを保持可能なマスクステージと、前記基板に対してパターン露光用の光を前記マスクを介して照射する照射手段と、前記ワークステージを所定の方向に移動させるワークステージ駆動機構と、前記基板に対する前記マスクの位置を調整するマスク位置調整手段と、を備え、前記マスクと前記基板とを近接配置した状態で、前記マスクの露光パターンを前記照射手段によって前記基板に露光転写する近接露光装置であって、
前記マスクステージ側に設けられ前記基板上面の高さを測定するマスク側変位センサと、
前記ワークステージ側に設けられ前記マスク下面の高さを測定する基板側変位センサと、
前記マスク側変位センサにより測定された前記基板上面の複数の所定位置での高さと、前記基板側変位センサにより測定された前記マスク下面の複数の所定位置での高さに基づいて、前記基板と前記マスクとを互いに対向させた場合の任意位置におけるギャップを算出するギャップ算出手段と、
を備えることを特徴とする近接露光装置。
(2) 前記マスク側変位センサは、非接触式センサであることを特徴とする上記(1)に記載の近接露光装置。
(3) 前記ギャップ算出手段は、前記照射手段によりパターン露光用の光が照射される各ショットにおける前記基板上の複数の露光エリアごとに、前記ギャップを算出することを特徴とする上記(1)に記載の近接露光装置。
(4) 被露光材としての基板を保持して移動可能なワークステージと、前記基板に対向配置されてマスクを保持可能なマスクステージと、前記基板に対してパターン露光用の光を前記マスクを介して照射する照射手段と、前記ワークステージを所定の方向に移動させるワークステージ駆動機構と、前記基板に対する前記マスクの位置を調整するマスク位置調整手段と、前記マスクステージ側に設けられ前記基板上面の高さを測定するマスク側変位センサと、前記ワークステージ側に設けられ前記マスク下面の高さを測定する基板側変位センサと、を備え、前記マスクの露光パターンを前記照射手段によって前記基板に露光転写する近接露光装置の前記基板と前記マスクとのギャップ分布を測定するギャップ測定方法であって、
前記ワークステージ駆動機構により前記ワークステージを移動させて、前記マスク側変位センサで前記基板上面の複数の所定位置の高さを測定する工程と、
前記ワークステージ駆動機構により前記ワークステージを移動させて、前記基板側変位センサで前記マスク下面の複数の所定位置の高さを測定する工程と、
前記マスク側変位センサにより測定された前記基板上面の複数の所定位置での高さと、前記基板側変位センサにより測定された前記マスク下面の複数の所定位置での高さに基づいて、前記基板と前記マスクとを互いに対向させた場合の任意位置におけるギャップを算出する工程と、を備えることを特徴とする近接露光装置のギャップ測定方法。
(5) 前記ギャップ算出工程は、前記基板上面の複数の所定位置での高さ及び前記マスク下面の複数の所定位置での高さの測定値から、それぞれ直線補間により高さ測定位置以外の前記基板上面の高さ及び前記マスク下面の高さを求める補間処理工程を有すること特徴とする上記(4)に記載の近接露光装置のギャップ測定方法。
(6) 前記ギャップ算出工程は、前記照射手段によりパターン露光用の光が照射される各ショットにおける前記基板上の複数の露光エリアごとに、前記ギャップを算出することを特徴とする上記(4)に記載の近接露光装置のギャップ測定方法。
本発明の近接露光装置及びそのギャップ測定方法によれば、基板とマスクとを対向させた場合の任意位置、特に、各ショットの露光エリアごとの任意位置における基板とマスクとのギャップ分布を作業者のスキルに影響されることなく、自動的に求めることができ、露光装置の設置時やメンテナンス時の調整をギャップ分布に基づいて効率的且つ精度よく調整することができる。また、高さ測定位置以外の基板上面の高さ及びマスク下面の高さを、基板上面の高さ及びマスク下面の高さの測定値から直線補間により求めることができ、ギャップ分布を任意位置で求めることができる。
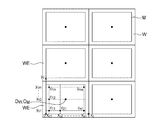
図1は本発明に係るステップ式近接露光装置の部分破断正面図であり、ステップ式近接露光装置PEは、図1に示すように、被露光材としての基板Wより小さいマスクMを用い、マスクMをマスクステージ1で保持すると共に、基板Wをワークステージ2で保持し、この状態でワークステージ2をマスクMに対してX軸方向とY軸方向の二軸方向にステップ移動させて、ステップ毎にマスクMと基板Wとを近接させて対向配置した状態で、照射手段3からパターン露光用の光をマスクMに向けて照射することにより、マスクMのパターンを基板W上に露光転写する。
装置ベース4上には、ワークステージ2をX軸方向にステップ移動させるためのX軸ステージ送り機構5が設置され、X軸ステージ送り機構5のX軸送り台5a上にはワークステージ2をY軸方向にステップ移動させるためのY軸ステージ送り機構6が設置され、Y軸ステージ送り機構6のY軸送り台6a上に、ワークステージ2が設置されている。ワークステージ2の上面には、基板Wがワークチャック等で真空吸引された状態で保持される。また、ワークステージ2の側部には、マスクMの下面高さを測定するための基板側変位センサ15が配設されている。従って、基板側変位センサ15は、ワークステージ2と共にX、Y軸方向に移動可能である。
Y軸ステージ送り機構6とワークステージ2の間には、ワークステージ2を上下方向に移動させるため、比較的位置決め分解能は粗いが移動ストローク及び移動速度が大きな上下粗動装置7と、上下粗動装置7と比べて高分解能での位置決めが可能でワークステージ2を上下に微動させてマスクMと基板Wとの対向面間のギャップを所定量に微調整する上下微動装置8が設置されている。
上下粗動装置7は後述の微動ステージ6bに設けられた適宜の駆動機構によりワークステージ2を微動ステージ6bに対して上下動させる。ワークステージ2の底面の4箇所に固定されたステージ粗動軸14は、微動ステージ6bに固定された直動ベアリング14aに係合し、微動ステージ6bに対し上下方向に案内される。なお、上下粗動装置7は、分解能が低くても、繰り返し位置決め精度が高いことが望ましい。
上下微動装置8は、Y軸送り台6aに固定された固定台9と、固定台9にその内端側を斜め下方に傾斜させた状態で取り付けられたリニアガイドの案内レール10とを備えており、該案内レール10に跨架されたスライダ11を介して案内レール10に沿って往復移動するスライド体12にボールねじのナット(図示せず)が連結されると共に、スライド体12の上端面は微動ステージ6bに固定されたフランジ12aに対して水平方向に摺動自在に接している。
そして、固定台9に取り付けられたモータ17によってボールねじのねじ軸を回転駆動させると、ナット、スライダ11及びスライド体12が一体となって案内レール10に沿って斜め方向に移動し、これにより、フランジ12aが上下微動する。
この上下微動装置8は、Y軸送り台6aのY軸方向の一端側(図1の左端側)に1台、他端側に2台合計3台設置されてそれぞれが独立に駆動制御されるようになっている。これにより、上下微動装置8は、後述するマスク側変位センサ31を構成するギャップセンサによる複数箇所でのマスクMと基板Wとのギャップ量の計測結果に基づき、3箇所のフランジ12aの高さを独立に微調整してワークステージ2の高さ及び傾きを微調整する。
また、Y軸送り台6a上には、ワークステージ2のY方向の位置を検出するY軸レーザ干渉計18に対向するバーミラー19と、ワークステージ2のX軸方向の位置を検出するX軸レーザ干渉計に対向するバーミラー(共に図示せず)とが設置されている。Y軸レーザ干渉計18に対向するバーミラー19は、Y軸送り台6aの一側でX軸方向に沿って配置されており、X軸レーザ干渉計に対向するバーミラーは、Y軸送り台6aの一端側でY軸方向に沿って配置されている。
Y軸レーザ干渉計18及びX軸レーザ干渉計は、それぞれ常に対応するバーミラーに対向するように配置されて装置ベース4に支持されている。なお、Y軸レーザ干渉計18は、X軸方向に離間して2台設置されている。2台のY軸レーザ干渉計18により、バーミラー19を介してY軸送り台6a、ひいてはワークステージ2のY軸方向の位置及びヨーイング誤差を検出する。また、X軸レーザ干渉計により、対向するバーミラーを介してX軸送り台5a、ひいてはワークステージ2のX軸方向の位置を検出する。
ステップ送り時に得られる2つのY軸方向位置データ及びX軸方向位置データの検出信号を制御装置40に出力し、制御装置40がこの検出信号(実際の位置データ)と指令された位置データ(位置決めすべき位置のデータ)との差に基づいて補正量を算出して、その算出結果を後述するマスク位置調整手段(及び必要に応じて上下微動装置8)の駆動回路に出力することで、該補正量に応じてマスク位置調整手段等が制御されてX軸方向及びY軸方向の位置ずれ及びヨーイング誤差が補正される。これにより、マスクMが、基板Wの露光すべき位置に正しく対向するようにアライメントされる。
マスクステージ1は、略長方形状の枠体からなるマスクフレーム24と、該マスクフレーム24の中央部開口にギャップを介して挿入されてX,Y,θ方向(X,Y平面内)に移動可能に支持されたマスク保持枠25とを備えており、マスクフレーム24は装置ベース4から突設された支柱4aによってワークステージ2の上方の定位置に保持されている。マスク保持枠25の中央部開口の下面には内方に張り出すフランジ26が開口の全周に沿って設けられている。このフランジ26の下面に、露光すべきパターンが描かれているマスクMが、真空式吸着装置(図示せず)等を介して着脱自在に保持される。
また、フランジ26の上方には、基板Wの上面の高さを測定すると共に、マスクMと基板Wとの対向面間のギャップを測定するギャップセンサを構成するマスク側変位センサ31、及びマスクMのアライメントマーク(図示せず)と、基板W側に設けられたアライメントマーク(図示せず)、又はワークステージ2、若しくはマスクフレーム24に設けられた基準アライメントマーク(図示せず)とを撮像する手段としてのアライメントカメラ30がそれぞれ移動可能に配置されている。
マスク側変位センサ31は、フランジ26のX軸方向に沿う二辺の内側上方にX軸方向に互いに離間して2か所ずつ、合計4か所配置されている。マスク側変位センサ31は、非接触式センサであればよく、光学式や超音波式や渦電流式のギャップセンサが適用される。アライメントカメラ30はフランジ26のX軸方向に沿う二辺の各内側上方でX軸方向の略中央部にそれぞれ一カ所ずつ合計2カ所配置されており、これらの2個のアライメントカメラ30の画像データに基づいて制御装置40が演算処理を行うことで、マスクMと基板Wとの平面ずれ量を検出する。そして、この検出平面ずれ量に応じてマスク位置調整手段が、マスク保持枠25をX,Y,θ方向に移動させてマスク保持枠25に保持されたマスクMの基板Wに対する位置を調整する。なお、これらマスク側変位センサ31やアライメントカメラ30は、図示しない駆動機構を介してマスクステージ1に対して移動可能に支持されてもよい。
マスク位置調整手段は、マスクフレーム24のX軸方向に沿う一辺に取り付けられたY軸方向駆動装置(図示せず)と、マスクフレーム24のY軸方向に沿う一辺に互いにY軸方向に離間して取り付けられた二台のX軸方向駆動装置(図示せず)とを備えており、Y軸方向駆動装置によりマスク保持枠25のY軸方向の調整を、二台のX軸方向駆動装置によりマスク保持枠25のX軸方向及びθ軸方向(Z軸まわりの揺動)の調整を行うようになっている。マスキングアパーチャ機構28は、マスク保持枠25に保持されたマスクM上の任意の範囲の露光光を必要に応じて遮光することで、露光範囲を制限する遮光ブレード(図示せず)を有する。
このように構成されたステップ式近接露光装置PEでは、基板生産時においては、マスクMと基板Wとを近接させて対向配置し、ギャップセンサによって構成されるマスク側変位センサ31を用いて、マスクMと基板WとのギャップGを測定してマスクMと基板Wとの位置を調整した後、照射手段3からパターン露光用の光を照射して、マスクMのパターンを基板W上に露光転写する。
一方、据え付け時やメンテナンス時のような基板生産前においても、以下の方法で、マスクMと基板Wとのギャップ分布を求める。この場合、マスクMと基板とのギャップ分布は、マスクMの下面の高さHmの分布と、基板Wの上面の高さHwの分布とを測定することで、水平面内(XY平面)での同一位置におけるマスクMの下面の高さHmと、基板Wの上面の高さHwとの差として、ギャップ算出手段を構成する制御装置40により求められる。
具体的には、基板Wをワークステージ2に保持させた後、X軸ステージ送り機構5、及びY軸ステージ送り機構6によって、ワークステージ2をX軸、及びY軸方向にステップ移動させて、マスク側変位センサ31で基板Wの上面の高さHwを、基板Wの全面に亘って測定する。基板Wの上面高さHwを測定する位置は、図2に示すように、装置ベース4に固定された座標系であるxa、ya、za軸座標上(以後、便宜上、A座標系とも言う)のマトリックス点(a11(xa1,ya1),a12(xa1,ya2),・・・,anm(xan,yam))を、作業者が入力することで決められる。
ステップ式近接露光装置PEは、先ず、ワークステージ2を移動させて、作業者が設定したマトリックス点(a11,a12,・・・,anm)のうち、第1の測定点a11(xa1、ya1)をマスク側変位センサ31に対向させ、1点目の基板Wの上面の高さh11を測定する。次いで、第2の測定点a12(xa1、ya2)に移動して2点目の基板Wの上面の高さh12を測定する。以後、同様の操作を繰り返して、基板Wの全面に亘って上面高さHw(h11,h12,・・・,hnm)を測定する。このようにして測定された基板Wの各点の上面高さHw(h11,h12,・・・,hnm)は、図3に示すように、3次元の分布で表わされる。なお、図2に示す2点鎖線は、後述する分割露光される際の基板Wの各パネルの分割線を示している。また、各マトリクス点の設定は、作業者によって任意に行われるが、各パネルの分割線との関係から行われても良い。また、上記測定は、いずれか1つのマスク側変位センサ31を用いて行われても良いし、複数のマスク側変位センサ31を用いて複数の測定点を同時に測定するようにしてもよい。さらに、A座標系及びB座標系の各マトリクス点は、作業者が決定してもよく、または、マスクステージ1とワークステージ2が自動的に移動して決定し、マスクMと基板Wの高さを測定する。
次に、図4に示すように、マスクMを吸着保持するマスク保持枠25に固定された座標系であるxb、yb、zb軸座標上(以後、便宜上、B座標系とも言う)で、作業者が入力した各マトリックス点(b11(xb1,yb1),b12(xb1,yb2),・・・,bnm(xbn,ybm))におけるマスクMの下面の高さHm(H11,H12,・・・,Hnm)を、ワークステージ2をX軸、及びY軸方向にステップ移動させながら、基板側変位センサ15で順次測定する。測定されたマスクMの各点下面高さHm(H11,H12,・・・,Hnm)は、図5に示すように、3次元の分布で表わされる。
なお、基板Wの上面の高さHwを測定する際には、マスクMをマスク保持枠25に保持した状態で行っても良いし、マスクMを取り外した状態で行っても良い。同様に、マスクMの下面の高さHmを測定する際にも、基板Wをワークステージ2に保持した状態で行っても良いし、基板Wを取り外した状態で行っても良い。また、基板WとマスクMの両方を保持した状態で測定を行う場合には、基板WとマスクMとの間隔を400μm以上として行う。
なお、基板Wの上面の高さHwを測定する際には、マスクMをマスク保持枠25に保持した状態で行っても良いし、マスクMを取り外した状態で行っても良い。同様に、マスクMの下面の高さHmを測定する際にも、基板Wをワークステージ2に保持した状態で行っても良いし、基板Wを取り外した状態で行っても良い。また、基板WとマスクMの両方を保持した状態で測定を行う場合には、基板WとマスクMとの間隔を400μm以上として行う。
次いで、図6に示すように、マスクMの中心Omと、基板Wの各露光エリアWEの中心Owとを一致させて、基板W上にマスクMのパターンを分割露光する複数のエリア(図6では、6エリア)を設定する。そして、エリア(各ショット)ごとに、マスクMに固定された座標系であるxc、yc、zc軸座標上(以後、便宜上、C座標系とも言う)のギャップ分布を求めたいマトリックス点(c11(xc1,yc1),c12(xc1,yc2),・・・,cnm(xcn,ycm))の座標を、作業者が入力する。
なお、A座標系、B座標系、及びC座標系は、座標系同士の相対位置が明確なものであれば原点がどこにあってもよい。即ち、各座標系の各マトリックス点(a11,a12,・・・,anm、b11,b12,・・・,bnm、c11,c12,・・・,cnm)は、相互に各座標系のx,y座標に変換することができる。従って、例えばA座標系の原点を基板Wの中心に、B座標系の原点及びC座標系の原点をそれぞれマスクMの中心に設定するようにしてもよい。また、B座標系のマトリクス点とC座標系のマトリクス点を同一点とすれば、後述するB座標系における直線補間処理を省略することができる。
そして、制御装置40により、C座標系のマトリックス点(c11,c12,・・・,cnm)の各座標(xc,yc)を、A座標系の各座標(xa,ya)に変換して、先に測定されているA座標系上の基板Wの上面高さHwの分布(図3参照)から、C座標系のマトリックス点(c11,c12,・・・,cnm)における基板Wの上面高さHwを求める。
同様に、制御装置40により、C座標系のマトリックス点(c11,c12,・・・,cnm)の座標(xc,yc)を、B座標系の座標(xb,yb)に変換して、先に測定されているB座標系上のマスクMの下面高さHmの分布(図5参照)から、C座標系のマトリックス点(c11,c12,・・・,cnm)におけるマスクMの下面高さHmを求める。
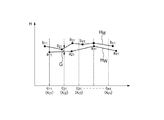
図7は、理解を容易にするため、基板Wの上面高さHw及びマスクMの下面高さHmの測定値を2次元で示した図である。即ち、一例として、ya=ya1の一定のx軸に沿う基板Wの上面高さHwと、yb=yb1の一定のx軸に沿うマスクMの下面高さHmを示している。このマスクMの下面高さHmと、基板Wの上面高さHwとの差が、マスクMと基板WとのギャップGとなる。
C座標系のマトリックス点(c11,c12,・・・,cnm)の座標から、A座標系のマトリックス点(a11,a12,・・・,anm)の座標、及びB座標系のマトリックス点(b11,b12,・・・,bnm)の座標への座標変換は容易に可能であるが、図7に示すように、ギャップ分布を求めたいマトリックス点(c11,c12,・・・,cnm)の座標は、必ずしも、基板Wの上面高さHwを測定したマトリックス点(a11,a12,・・・,anm)の座標とは一致しない。また、同様に、マスクMの下面高さHmを測定したマトリックス点(b11,b12,・・・,bnm)の座標とはほとんど一致しない。
測定点の座標と座標が一致しないマトリックス点(c11,c12,・・・,cnm)における基板Wの上面高さHw、及びマスクMの下面高さHmは、隣り合う測定点の値を用いて、制御装置40が直線補間処理することで求めることができる。例えば、図7に示すように、マトリックス点c21におけるマスクMの下面高さHmは、マスクMの下面高さHmがマトリックス点b21とb31との間で直線的に変化するものと仮定して、比例配分することで求められる。基板Wの上面高さHwについても、同様にして求めることができる。なお、図7においては、分かり易く2次元表示したが、実際には、マスクMの下面高さHm及び基板Wの上面高さHwは、xy方向に変化しているので、3次元での直線補間処理が行われる。
制御装置40は、測定された、或いは直線補間処理により求められた各マトリックス点(c11,c12,・・・,cnm)における基板Wの上面高さHwとマスクMの下面高さHmとから、両者の差としてギャップGを求める。図8は、このようにして求めた各マトリックス点(c11,c12,・・・,cnm)におけるギャップGを、3次元で示したギャップ分布図である。
上記したギャップ分布の測定は、一連の作動手順をステップ式近接露光装置PEの制御装置40に記憶しておき、ステップ式近接露光装置PEをギャップ分布測定モードで作動させることにより、自動的に求めることができる。従って、作業者のスキルに影響されることなく、基板WとマスクMとのギャップ分布を自動的に求めることができる。
これにより、ステップ式近接露光装置PEの据え付け時や、メンテナンス時には、上記したように自動的にギャップ分布を測定して、その測定結果からマスクステージ1、及びワークステージ2を調整した後、再度、ギャップ分布の測定を繰り返し行うことで、作業者のスキルに影響されずに、短時間で且つ精度よく調整することができる。
また、このようにして求められた据え付け時やメンテナンス時に測定されたギャップ分布と、基板生産時におけるギャップ分布と比較することにより、高精度での露光転写が可能な最適ギャップになるように、基板生産に先だって設定することができ、生産性を向上させることができる。
上記したように、本実施形態の近接露光装置PEによれば、マスクステージ1側に設けられて基板W上面の高さHwを測定するマスク側変位センサ31と、ワークステージ2側に設けられてマスクM下面の高さHmを測定する基板側変位センサ15と、測定された基板上面の複数の所定位置での高さとHw、マスク下面の複数の所定位置での高さHmに基づいて、基板WとマスクMとを互いに対向させた場合の任意位置におけるギャップGを算出するギャップ算出手段を構成する制御装置40と、を備えるので、各ショットの露光エリアごとの任意位置における基板WとマスクMとのギャップ分布を作業者のスキルに影響されることなく、自動的に求めることができ、近接露光装置PEの設置やメンテナンス時の調整をこのギャップ分布に基づいて精度よく且つ効率的に調整することができる。
また、本実施形態の近接露光装置PEのギャップ測定方法によれば、ワークステージ2を移動させて、複数の所定位置の基板上面高さHw、及びマスク下面高さHmを、それぞれマスク側変位センサ31、及び基板側変位センサ15で測定し、基板WとマスクMとを対向させたときのギャップ分布を、基板上面高さHw及びマスク下面高さHmの測定値に基づいて求めるようにしたので、基板WとマスクMとを対向させたときの任意位置のギャップ分布を簡単に求めることができる。
更に、高さ測定位置以外の基板上面の高さHw及びマスク下面の高さHmを、基板上面の高さHw及びマスク下面の高さHmの測定値から直線補間により求めるようにしたので、ギャップ分布を任意位置で求めることができる。
尚、本発明は、前述した実施形態に限定されるものではなく、適宜、変形、改良、等が可能である。例えば、上記説明では、ステップ式近接露光装置について説明したがこれに限定されず、マスクのパターンを基板に露光転写する各種形式の露光装置にも同様に適用することができる。
1 マスクステージ
2 ワークステージ
3 照射手段
5 X軸ステージ送り機構(ワークステージ駆動機構)
6 Y軸ステージ送り機構(ワークステージ駆動機構)
7 上下粗動装置(ワークステージ駆動機構)
8 上下微動装置(ワークステージ駆動機構)
15 基板側変位センサ
31 マスク側変位センサ(ギャップセンサ)
40 制御装置(ギャップ算出手段)
G ギャップ
Hm マスク下面の高さ
Hw 基板上面の高さ
M マスク
PE ステップ式近接露光装置(露光装置)
W 基板(被露光材)
WE 露光エリア
2 ワークステージ
3 照射手段
5 X軸ステージ送り機構(ワークステージ駆動機構)
6 Y軸ステージ送り機構(ワークステージ駆動機構)
7 上下粗動装置(ワークステージ駆動機構)
8 上下微動装置(ワークステージ駆動機構)
15 基板側変位センサ
31 マスク側変位センサ(ギャップセンサ)
40 制御装置(ギャップ算出手段)
G ギャップ
Hm マスク下面の高さ
Hw 基板上面の高さ
M マスク
PE ステップ式近接露光装置(露光装置)
W 基板(被露光材)
WE 露光エリア
Claims (6)
- 被露光材としての基板を保持して移動可能なワークステージと、前記基板に対向配置されてマスクを保持可能なマスクステージと、前記基板に対してパターン露光用の光を前記マスクを介して照射する照射手段と、前記ワークステージを所定の方向に移動させるワークステージ駆動機構と、前記基板に対する前記マスクの位置を調整するマスク位置調整手段と、を備え、前記マスクと前記基板とを近接配置した状態で、前記マスクの露光パターンを前記照射手段によって前記基板に露光転写する近接露光装置であって、
前記マスクステージ側に設けられ前記基板上面の高さを測定するマスク側変位センサと、
前記ワークステージ側に設けられ前記マスク下面の高さを測定する基板側変位センサと、
前記マスク側変位センサにより測定された前記基板上面の複数の所定位置での高さと、前記基板側変位センサにより測定された前記マスク下面の複数の所定位置での高さに基づいて、前記基板と前記マスクとを互いに対向させた場合の任意位置におけるギャップを算出するギャップ算出手段と、
を備えることを特徴とする近接露光装置。 - 前記マスク側変位センサは、非接触式センサであることを特徴とする請求項1に記載の近接露光装置。
- 前記ギャップ算出手段は、前記照射手段によりパターン露光用の光が照射される各ショットにおける前記基板上の複数の露光エリアごとに、前記ギャップを算出することを特徴とする請求項1に記載の近接露光装置。
- 被露光材としての基板を保持して移動可能なワークステージと、前記基板に対向配置されてマスクを保持可能なマスクステージと、前記基板に対してパターン露光用の光を前記マスクを介して照射する照射手段と、前記ワークステージを所定の方向に移動させるワークステージ駆動機構と、前記基板に対する前記マスクの位置を調整するマスク位置調整手段と、前記マスクステージ側に設けられ前記基板上面の高さを測定するマスク側変位センサと、前記ワークステージ側に設けられ前記マスク下面の高さを測定する基板側変位センサと、を備え、前記マスクの露光パターンを前記照射手段によって前記基板に露光転写する近接露光装置の前記基板と前記マスクとのギャップ分布を測定するギャップ測定方法であって、
前記ワークステージ駆動機構により前記ワークステージを移動させて、前記マスク側変位センサで前記基板上面の複数の所定位置の高さを測定する工程と、
前記ワークステージ駆動機構により前記ワークステージを移動させて、前記基板側変位センサで前記マスク下面の複数の所定位置の高さを測定する工程と、
前記マスク側変位センサにより測定された前記基板上面の複数の所定位置での高さと、前記基板側変位センサにより測定された前記マスク下面の複数の所定位置での高さに基づいて、前記基板と前記マスクとを互いに対向させた場合の任意位置におけるギャップを算出する工程と、を備えることを特徴とする近接露光装置のギャップ測定方法。 - 前記ギャップ算出工程は、前記基板上面の複数の所定位置での高さ及び前記マスク下面の複数の所定位置での高さの測定値から、それぞれ直線補間により高さ測定位置以外の前記基板上面の高さ及び前記マスク下面の高さを求める補間処理工程を有すること特徴とする請求項4に記載の近接露光装置のギャップ測定方法。
- 前記ギャップ算出工程は、前記照射手段によりパターン露光用の光が照射される各ショットにおける前記基板上の複数の露光エリアごとに、前記ギャップを算出することを特徴とする請求項4に記載の近接露光装置のギャップ測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010285074A JP2012133122A (ja) | 2010-12-21 | 2010-12-21 | 近接露光装置及びそのギャップ測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010285074A JP2012133122A (ja) | 2010-12-21 | 2010-12-21 | 近接露光装置及びそのギャップ測定方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012133122A true JP2012133122A (ja) | 2012-07-12 |
Family
ID=46648799
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010285074A Pending JP2012133122A (ja) | 2010-12-21 | 2010-12-21 | 近接露光装置及びそのギャップ測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012133122A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9281479B2 (en) | 2013-08-09 | 2016-03-08 | Samsung Display Co., Ltd. | Apparatus and method for fabricating organic light emitting display |
| JP2016170411A (ja) * | 2015-03-10 | 2016-09-23 | 株式会社ブイ・テクノロジー | 近接露光装置及び近接露光方法 |
| KR20190026709A (ko) * | 2015-04-15 | 2019-03-13 | 캐논 가부시끼가이샤 | 노광 장치, 노광 방법, 및 물품의 제조 방법 |
| CN117393487A (zh) * | 2023-12-12 | 2024-01-12 | 迈为技术(珠海)有限公司 | 一种平面度间隙自适应调整方法、装置、设备和介质 |
-
2010
- 2010-12-21 JP JP2010285074A patent/JP2012133122A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9281479B2 (en) | 2013-08-09 | 2016-03-08 | Samsung Display Co., Ltd. | Apparatus and method for fabricating organic light emitting display |
| TWI626328B (zh) * | 2013-08-09 | 2018-06-11 | 三星顯示器有限公司 | 用於製備有機發光顯示器之設備及方法 |
| JP2016170411A (ja) * | 2015-03-10 | 2016-09-23 | 株式会社ブイ・テクノロジー | 近接露光装置及び近接露光方法 |
| KR20190026709A (ko) * | 2015-04-15 | 2019-03-13 | 캐논 가부시끼가이샤 | 노광 장치, 노광 방법, 및 물품의 제조 방법 |
| KR102078079B1 (ko) | 2015-04-15 | 2020-02-17 | 캐논 가부시끼가이샤 | 노광 장치, 노광 방법, 및 물품의 제조 방법 |
| CN117393487A (zh) * | 2023-12-12 | 2024-01-12 | 迈为技术(珠海)有限公司 | 一种平面度间隙自适应调整方法、装置、设备和介质 |
| CN117393487B (zh) * | 2023-12-12 | 2024-04-02 | 迈为技术(珠海)有限公司 | 一种平面度间隙自适应调整方法、装置、设备和介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9639008B2 (en) | Lithography apparatus, and article manufacturing method | |
| TWI637246B (zh) | Projection exposure device and method | |
| WO2018059358A1 (zh) | 一种光学测量装置和方法 | |
| US11009799B2 (en) | Exposure apparatus, manufacturing method of flat-panel display, device manufacturing method, and exposure method | |
| TW201723671A (zh) | 曝光裝置、平面顯示器之製造方法、元件製造方法、及曝光方法 | |
| JP6794536B2 (ja) | 光学式測定装置及び方法 | |
| US9529282B2 (en) | Position-measurement systems | |
| TW201723673A (zh) | 曝光裝置、平面顯示器之製造方法、以及元件製造方法 | |
| JP2012049326A (ja) | マスクの位置決め装置及びマスクの回転中心算出方法 | |
| JP2010231062A (ja) | 描画装置および描画方法 | |
| JP5674197B2 (ja) | 近接露光装置及び近接露光方法 | |
| JP2012133122A (ja) | 近接露光装置及びそのギャップ測定方法 | |
| JP7633044B2 (ja) | 露光方法および露光装置 | |
| JP2008015314A (ja) | 露光装置 | |
| JP6142214B2 (ja) | 近接露光装置及び近接露光方法 | |
| JP2006100590A (ja) | 近接露光装置 | |
| JP6727554B2 (ja) | 露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び露光方法 | |
| JP6101603B2 (ja) | ステージ装置および荷電粒子線装置 | |
| CN100401014C (zh) | 线宽测量装置 | |
| JP2006093604A (ja) | 近接露光装置 | |
| JP4487688B2 (ja) | ステップ式近接露光装置 | |
| JP6744588B2 (ja) | 露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び露光方法 | |
| JP4487700B2 (ja) | 近接露光装置 | |
| JP5166681B2 (ja) | ステップ式近接露光装置 | |
| JP2006098774A (ja) | 近接露光装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140210 |
|
| A072 | Dismissal of procedure |
Free format text: JAPANESE INTERMEDIATE CODE: A072 Effective date: 20140603 |