JP2012102702A - 内燃機関 - Google Patents
内燃機関 Download PDFInfo
- Publication number
- JP2012102702A JP2012102702A JP2010253946A JP2010253946A JP2012102702A JP 2012102702 A JP2012102702 A JP 2012102702A JP 2010253946 A JP2010253946 A JP 2010253946A JP 2010253946 A JP2010253946 A JP 2010253946A JP 2012102702 A JP2012102702 A JP 2012102702A
- Authority
- JP
- Japan
- Prior art keywords
- injector
- intake pipe
- fuel
- correction coefficient
- learning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/2406—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using essentially read only memories
- F02D41/2425—Particular ways of programming the data
- F02D41/2429—Methods of calibrating or learning
- F02D41/2451—Methods of calibrating or learning characterised by what is learned or calibrated
- F02D41/2454—Learning of the air-fuel ratio control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/2406—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using essentially read only memories
- F02D41/2425—Particular ways of programming the data
- F02D41/2429—Methods of calibrating or learning
- F02D41/2441—Methods of calibrating or learning characterised by the learning conditions
- F02D41/2445—Methods of calibrating or learning characterised by the learning conditions characterised by a plurality of learning conditions or ranges
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/30—Controlling fuel injection
- F02D41/3094—Controlling fuel injection the fuel injection being effected by at least two different injectors, e.g. one in the intake manifold and one in the cylinder
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Fuel-Injection Apparatus (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
Abstract
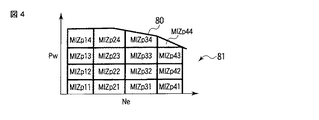
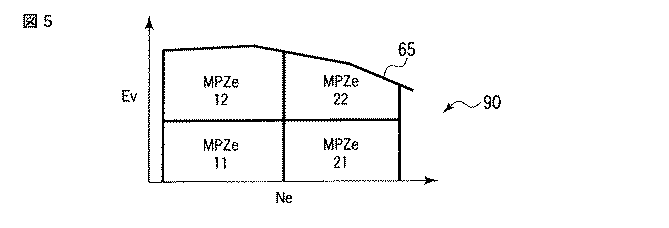
【解決手段】 内燃機関10のECU50は、吸気管内噴射インジェクタ用負荷−回転数学習域65と吸気管内噴射インジェクタ用燃料量−回転数学習域80とで、吸気管内噴射インジェクタ36の燃料噴射量を補正する燃料噴射量補正係数を学習する。ECU50は、筒内噴射インジェクタ用負荷−回転数学習域66において、吸気管内噴射インジェクタ36の燃料噴射量を、吸気管内噴射インジェクタ用燃料量−回転数学習域80の対応する領域に記憶される燃料噴射量補正係数を用いて補正し、かつ、筒内噴射インジェクタ用負荷―回転数学習域66を複数に分割した分割領域において、筒内噴射インジェクタ35の燃料噴射量補正係数を学習して記憶する。
【選択図】図1
Description
Claims (4)
- 燃焼室内に直接燃料を噴射する筒内噴射インジェクタと、
前記燃焼室に連通する吸気管内に燃料を噴射する吸気管内噴射インジェクタと
を具備し、
前記吸気管内噴射インジェクタの燃料制御学習は、前記吸気管内噴射インジェクタのみが動作する運転状態で行われ、
前記筒内噴射インジェクタの燃料制御学習は、前記筒内噴射インジェクタと前記吸気管内噴射インジェクタとが動作する運転状態に行われる
ことを特徴とする内燃機関。 - 燃焼室内に直接燃料を噴射する筒内噴射インジェクタと、
前記燃焼室に連通する吸気管内に燃料を噴射する吸気管内噴射インジェクタと、
前記筒内噴射インジェクタと前記吸気管内噴射インジェクタとを制御する制御部と
を具備し、
前記制御部は、
前記吸気管内噴射インジェクタのみが噴射しかつ負荷と出力軸回転数とによって規定される吸気管内噴射インジェクタ用負荷−回転数学習域を複数に分割した各分割領域において、前記吸気管内噴射インジェクタからの燃料噴射量を補正する燃料噴射量補正係数を学習して記憶するとともに、前記吸気管内噴射インジェクタのみが噴射しかつ燃料噴射量と出力軸回転数とによって規定される吸気管内噴射インジェクタ用燃料量−回転数学習域を複数に分割した各分割領域において、前記吸気管内噴射インジェクタからの燃料噴射量を補正する燃料噴射量補正係数を学習して記憶し、
前記筒内噴射インジェクタと前記吸気管内噴射インジェクタとがそれぞれの燃料噴射割合で燃料を噴射しかつ負荷と出力軸回転数とによって規定される筒内噴射インジェクタ用負荷−回転数学習域において、前記吸気管内噴射インジェクタの燃料噴射量を、前記吸気管内噴射インジェクタの燃料目標噴射量と出力軸回転数とを用いて前記吸気管内噴射インジェクタ用燃料量−回転数学習域の前記各分割領域のうちの対応する領域に設定される前記燃料噴射量補正係数を用いて補正して決定し、かつ、前記筒内噴射インジェクタ用負荷―回転数学習域を複数に分割した各分割領域において、前記筒内噴射インジェクタからの燃料噴射量を補正する燃料噴射量補正係数を学習して記憶する
ことを特徴とする内燃機関。 - 前記制御部は、前記筒内噴射インジェクタ用学習域での前記吸気管内噴射インジェクタの燃料噴射量を、前記吸気管内の圧力に基づいてさらに補正する
ことを特徴とする請求項2に記載の内燃機関。 - 前記制御部が前記吸気管内噴射インジェクタ用負荷―回転数学習域で学習する前記燃料噴射量補正係数は積分補正係数であり、前記制御部は、前記吸気管内噴射インジェクタ用負荷―回転数学習域に予め決定される比例補正係数を用いて前記吸気管内噴射インジェクタの燃料噴射量を補正しながら前記積分補正係数を学習して記憶し、
前記制御部が前記筒内噴射インジェクタ用負荷―回転数学習域で学習する前記燃料噴射量補正係数は積分補正係数であり、前記制御部は、前記筒内噴射インジェクタ用負荷−回転数学習域に予め決定される比例補正係数を用いて前記筒内噴射インジェクタの噴射燃料を補正しながら前記積分補正係数を学習し記憶する
ことを特徴とする請求項2または請求項3に記載の内燃機関。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010253946A JP5732232B2 (ja) | 2010-11-12 | 2010-11-12 | 内燃機関 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010253946A JP5732232B2 (ja) | 2010-11-12 | 2010-11-12 | 内燃機関 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012102702A true JP2012102702A (ja) | 2012-05-31 |
| JP5732232B2 JP5732232B2 (ja) | 2015-06-10 |
Family
ID=46393366
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010253946A Expired - Fee Related JP5732232B2 (ja) | 2010-11-12 | 2010-11-12 | 内燃機関 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5732232B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018009478A (ja) * | 2016-07-12 | 2018-01-18 | トヨタ自動車株式会社 | エンジンの燃料噴射制御装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000227036A (ja) * | 1999-02-04 | 2000-08-15 | Mazda Motor Corp | 火花点火式直噴エンジンの制御装置 |
| JP2001090592A (ja) * | 1999-09-24 | 2001-04-03 | Mazda Motor Corp | 筒内噴射式エンジンの燃料噴射制御装置 |
| JP2003097337A (ja) * | 2001-09-21 | 2003-04-03 | Toyota Motor Corp | 内燃機関の空燃比制御装置 |
| JP2005048730A (ja) * | 2003-07-31 | 2005-02-24 | Toyota Motor Corp | 内燃機関の空燃比制御装置 |
-
2010
- 2010-11-12 JP JP2010253946A patent/JP5732232B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000227036A (ja) * | 1999-02-04 | 2000-08-15 | Mazda Motor Corp | 火花点火式直噴エンジンの制御装置 |
| JP2001090592A (ja) * | 1999-09-24 | 2001-04-03 | Mazda Motor Corp | 筒内噴射式エンジンの燃料噴射制御装置 |
| JP2003097337A (ja) * | 2001-09-21 | 2003-04-03 | Toyota Motor Corp | 内燃機関の空燃比制御装置 |
| JP2005048730A (ja) * | 2003-07-31 | 2005-02-24 | Toyota Motor Corp | 内燃機関の空燃比制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018009478A (ja) * | 2016-07-12 | 2018-01-18 | トヨタ自動車株式会社 | エンジンの燃料噴射制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5732232B2 (ja) | 2015-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100310094B1 (ko) | 기통내분사형불꽃점화식내연엔진의제어장치 | |
| JP4893553B2 (ja) | 内燃機関の制御装置 | |
| US9976510B2 (en) | Fuel injection control apparatus | |
| CN102265014B (zh) | 内燃机控制装置 | |
| JP2009068388A (ja) | 内燃機関の制御装置 | |
| US6374798B1 (en) | Fuel injection controller for cylinder injection engine | |
| US7082898B2 (en) | Internal combustion engine of compression ignition type | |
| JP4815407B2 (ja) | 内燃機関の運転制御装置 | |
| US7574299B2 (en) | Fuel injection control apparatus and method for internal combustion engine | |
| US7086387B2 (en) | Control apparatus of internal combustion engine | |
| JP5732232B2 (ja) | 内燃機関 | |
| JP2009121364A (ja) | 燃料噴射制御装置 | |
| JP2010024996A (ja) | 内燃機関及び内燃機関の燃料噴射制御装置 | |
| JP5867441B2 (ja) | 内燃機関の制御装置 | |
| JP4871307B2 (ja) | エンジンの燃料制御装置 | |
| JP2014074337A (ja) | 内燃機関の制御装置 | |
| JP5348012B2 (ja) | 内燃機関 | |
| CN116696581A (zh) | 内燃机系统 | |
| JP2001304012A (ja) | 内燃機関の燃料噴射量制御装置 | |
| JP2009275617A (ja) | 内燃機関の制御装置 | |
| JP2008101540A (ja) | 内燃機関の制御装置 | |
| JP2004316545A (ja) | 圧縮着火式内燃機関の気筒別制御装置 | |
| JP2009127485A (ja) | 内燃機関 | |
| JP5658205B2 (ja) | 内燃機関の始動制御装置 | |
| JP2009138654A (ja) | 内燃機関の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121012 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130516 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130521 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20130719 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130722 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130802 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140404 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20140520 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20140711 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150209 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150413 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5732232 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |