JP2012065736A - 磁気共鳴イメージング装置及び実数成分画像取得方法 - Google Patents
磁気共鳴イメージング装置及び実数成分画像取得方法 Download PDFInfo
- Publication number
- JP2012065736A JP2012065736A JP2010211501A JP2010211501A JP2012065736A JP 2012065736 A JP2012065736 A JP 2012065736A JP 2010211501 A JP2010211501 A JP 2010211501A JP 2010211501 A JP2010211501 A JP 2010211501A JP 2012065736 A JP2012065736 A JP 2012065736A
- Authority
- JP
- Japan
- Prior art keywords
- sequence
- pulse
- unit
- magnetic resonance
- imaging apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
【解決手段】 位相補正用エコーデータを取得するための第1シーケンス部と画像用エコーデータを取得するための第2シーケン部とを、時間間隔TIを空けて組み合わせた撮像シーケンスを用い、第1シーケンス部の最後に縦磁化調整RFパルスを照射する。そして、第1シーケンス部で計測されたエコー信号に基づいて、第2シーケンス部で計測されたエコー信号に基づいて再構成された複素画像データを位相補正し、位相補正後の複素画像データの内の実数成分を抽出して前記実数成分画像を作成する。
【選択図】 図4
Description
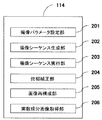
本発明に係る撮像シーケンスは、位相補正用エコーデータを取得するための第1シーケンス部(位相補正データ取得シーケンス)部と画像用エコーデータを取得するための第2シーケンス部(本計測シーケンス、画像データ取得シーケンス)部とを、時間間隔TIを空けて組み合わせて成る。第2シーケンス部で取得する画像用エコーデータに潜在する位相変化と略同じ位相変化を第1シーケンス部で取得するために、第1シーケンス部のシーケンス形状を、第2シーケンス部のシーケンス形状と基本的に同じとする。ただし、第1シーケンス部にはその最後に縦磁化を所望角度に回転させるための縦磁化調整RFパルスを有し、このRFパルスが本発明の特徴の一つである。この縦磁化回転用RFパルスの照射タイミングで、横磁化の位相が収束状態である必要があることから、本発明に係る第1シーケンス部と第2シーケンス部の基本シーケンス形状は、FSEシーケンスやbalanced SSFPシーケンスが好ましい。以下、撮像シーケンスがFSEシーケンスである実施例とbalanced SSFPシーケンスである実施例をそれぞれ詳細に説明する。
位相値:Ф = arctan(Vi/Vr) (1)
と計算して求める。この2次元位相マップは、縦磁化の極性は保持していないため、第1シーケンス部における位相変化のみを包含している。
そして、画素毎に(2)式に基づいた位相補正を行い、位相補正後の2次元複素画像データを得る。或いは、(1)式に基づいて、ステップ312で得られた2次元複素画像データの2次元位相マップを求め、この2次元位相マップからステップ311で作成された2次元位相マップを画素毎に差分して、差分位相マップを求める。そして、差分位相マップの位相値のコサイン又はサインをステップ312で得られた2次元複素画像の絶対値に掛けて、位相補正された2次元複素画像データの実数成分と虚数成分をそれぞれ求めることができる。以上の位相補正により、ステップ312で得られた2次元複素画像データの位相を、MRI装置や環境に起因する位相変化が除去されて、90度RFパルス411の照射直前の縦磁化の極性のみが反映された値とすることができる。
Claims (8)
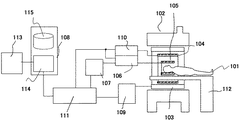
- 被検体に照射するRFパルスを発生するRFパルス発生手段と、
所定の撮像シーケンスに基づいて、前記RFパルス発生部を制御し、前記被検体からのエコー信号の計測を制御する計測制御部と、
前記エコー信号のデータを演算処理して前記被検体の実数成分画像を取得する演算処理部と、
を備えた磁気共鳴イメージング装置において、
前記撮像シーケンスは、第1シーケンス部と第2シーケンス部とを所定の時間間隔を空けて組み合わせて成り、
前記第1シーケンス部は最後に縦磁化を所定の角度に回転するための縦磁化調整RFパルスを有し、
前記演算処理部は、前記第1シーケンス部で計測されたエコー信号に基づいて、前記第2シーケンス部で計測されたエコー信号に基づいて再構成された複素画像データを位相補正し、位相補正後の複素画像データの内の実数成分を抽出して前記実数成分画像を作成することを特徴とする磁気共鳴イメージング装置。 - 請求項1記載の磁気共鳴イメージング装置において、
前記第1シーケンス部は、前記第2シーケンス部と同じシーケンス形状に基づいていることを特徴とする磁気共鳴イメージング装置。 - 請求項2記載の磁気共鳴イメージング装置において、
前記第1シーケンス部と前記第2シーケンス部とは、FSEシーケンスに基づいていることを特徴とする磁気共鳴イメージング装置。 - 請求項1記載の磁気共鳴イメージング装置において、
前記所定の角度は180°であることを特徴とする磁気共鳴イメージング装置。 - 請求項3記載の磁気共鳴イメージング装置において、
前記計測制御部は、前記縦磁化調整RFパルスとして、縦磁化を180°反転するための90°RFパルスを、前記FSEシーケンスにおける最後の180°RFパルスの後に、180°RFパルス間の時間間隔の半分の時間空けて照射することを特徴とする磁気共鳴イメージング装置。 - 請求項2記載の磁気共鳴イメージング装置において、
前記第1シーケンス部と前記第2シーケンス部とは、balanced SSFPシーケンスに基づいていることを特徴とする磁気共鳴イメージング装置。 - 請求項6記載の磁気共鳴イメージング装置において、
前記計測制御部は、前記balanced SSFPシーケンスの励起角度をα°の場合に、前記縦磁化調整RFパルスとして、縦磁化を180°反転するための(180−α/2)°RFパルスを、前記balanced SSFPシーケンスにおける最後のα°RFパルスの後に、α°RFパルス間の時間間隔の半分の時間空けて照射することを特徴とする磁気共鳴イメージング装置。 - 磁気共鳴イメージング装置が作動して実数成分画像を取得するための実数成分画像取得方法であって、
位相補正用のエコー信号を計測するステップと、
縦磁化を所定の角度回転させるための縦磁化調整RFパルスを照射するステップと、
所定の時間間隔だけ時間を空けるステップと、
画像用のエコー信号を計測するステップと、
前記画像用のエコー信号に基づいて複素画像データを取得するステップと、
前記複素画像データを前記位相補正用のエコー信号に基づく位相補正データを用いて位相補正するステップと、
前記位相補正後の複素画像データの内から実数成分を抽出して実数成分画像を作成するステップと、
を有することを特徴とする実数成分画像取得方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010211501A JP2012065736A (ja) | 2010-09-22 | 2010-09-22 | 磁気共鳴イメージング装置及び実数成分画像取得方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010211501A JP2012065736A (ja) | 2010-09-22 | 2010-09-22 | 磁気共鳴イメージング装置及び実数成分画像取得方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012065736A true JP2012065736A (ja) | 2012-04-05 |
| JP2012065736A5 JP2012065736A5 (ja) | 2013-10-31 |
Family
ID=46163747
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010211501A Pending JP2012065736A (ja) | 2010-09-22 | 2010-09-22 | 磁気共鳴イメージング装置及び実数成分画像取得方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012065736A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108872959A (zh) * | 2017-05-11 | 2018-11-23 | 通用汽车环球科技运作有限责任公司 | 低占空比传输中的多普勒分辨率提高 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004166751A (ja) * | 2002-11-15 | 2004-06-17 | Shimadzu Corp | Mrイメージング装置 |
| JP2004166750A (ja) * | 2002-11-15 | 2004-06-17 | Shimadzu Corp | Mrイメージング装置 |
| JP2004261619A (ja) * | 2004-06-25 | 2004-09-24 | Toshiba Corp | 磁気共鳴イメージング装置 |
| JP2006081704A (ja) * | 2004-09-16 | 2006-03-30 | Hitachi Medical Corp | 磁気共鳴イメージング装置 |
| WO2008136274A1 (ja) * | 2007-04-27 | 2008-11-13 | Hitachi Medical Corporation | 磁気共鳴イメージング装置及び方法 |
| JP2009028525A (ja) * | 2007-06-29 | 2009-02-12 | Toshiba Corp | 磁気共鳴イメージング装置及び磁気共鳴イメージング方法 |
-
2010
- 2010-09-22 JP JP2010211501A patent/JP2012065736A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004166751A (ja) * | 2002-11-15 | 2004-06-17 | Shimadzu Corp | Mrイメージング装置 |
| JP2004166750A (ja) * | 2002-11-15 | 2004-06-17 | Shimadzu Corp | Mrイメージング装置 |
| JP2004261619A (ja) * | 2004-06-25 | 2004-09-24 | Toshiba Corp | 磁気共鳴イメージング装置 |
| JP2006081704A (ja) * | 2004-09-16 | 2006-03-30 | Hitachi Medical Corp | 磁気共鳴イメージング装置 |
| WO2008136274A1 (ja) * | 2007-04-27 | 2008-11-13 | Hitachi Medical Corporation | 磁気共鳴イメージング装置及び方法 |
| JP2009028525A (ja) * | 2007-06-29 | 2009-02-12 | Toshiba Corp | 磁気共鳴イメージング装置及び磁気共鳴イメージング方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108872959A (zh) * | 2017-05-11 | 2018-11-23 | 通用汽车环球科技运作有限责任公司 | 低占空比传输中的多普勒分辨率提高 |
| CN108872959B (zh) * | 2017-05-11 | 2022-07-29 | 通用汽车环球科技运作有限责任公司 | 用于获得目标的多普勒频率的方法和系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104345289B (zh) | 用于确定水的t1时间和脂肪的t1时间的方法和磁共振设备 | |
| JP5942271B2 (ja) | 磁気共鳴イメージング装置及び流体強調画像取得法 | |
| JP5848713B2 (ja) | 磁気共鳴イメージング装置及びコントラスト強調画像取得方法 | |
| US9766313B2 (en) | MR imaging using apt contrast enhancement and sampling at multiple echo times | |
| JP2014503249A (ja) | マルチポイントディクソン技術を用いるmr撮像 | |
| CN103649765A (zh) | 具有b1绘制的mr成像 | |
| JP6496311B2 (ja) | 温度マッピングを伴うmrイメージング | |
| US20160170001A1 (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method | |
| JP2014008173A (ja) | 磁気共鳴イメージング装置及び分離画像撮像方法 | |
| US8148980B2 (en) | Magnetic resonance imaging system and method | |
| JP5722212B2 (ja) | 磁気共鳴イメージング装置及び方法 | |
| JP2010233907A (ja) | 磁気共鳴イメージング装置及び感度補正方法 | |
| JP2008055023A (ja) | 磁気共鳴イメージング装置 | |
| US10859652B2 (en) | MR imaging with dixon-type water/fat separation | |
| WO2009081786A1 (ja) | 磁気共鳴イメージング装置及び磁化率強調画像撮影方法 | |
| JP2019535435A (ja) | プロペラmrイメージング | |
| JP5508165B2 (ja) | 磁気共鳴イメージング装置及びt2マップ取得方法 | |
| JP2012065736A (ja) | 磁気共鳴イメージング装置及び実数成分画像取得方法 | |
| JP2006061235A (ja) | 磁気共鳴イメージング装置 | |
| JP2012095891A (ja) | 磁気共鳴イメージング装置 | |
| JP6169909B2 (ja) | 磁気共鳴イメージング装置及び実数成分画像取得方法 | |
| JP6579908B2 (ja) | 磁気共鳴イメージング装置及び拡散強調画像計算方法 | |
| JP6013324B2 (ja) | 磁気共鳴イメージング装置及びラディアルサンプリング方法 | |
| WO2015031408A1 (en) | Multi-spectral mri scan with magnetization recovery | |
| JP5942265B2 (ja) | 磁気共鳴イメージング装置及びrfパルス制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130917 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130917 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140407 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140526 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140722 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141118 |