JP2012014255A - Information distribution apparatus - Google Patents
Information distribution apparatus Download PDFInfo
- Publication number
- JP2012014255A JP2012014255A JP2010147800A JP2010147800A JP2012014255A JP 2012014255 A JP2012014255 A JP 2012014255A JP 2010147800 A JP2010147800 A JP 2010147800A JP 2010147800 A JP2010147800 A JP 2010147800A JP 2012014255 A JP2012014255 A JP 2012014255A
- Authority
- JP
- Japan
- Prior art keywords
- information
- vehicle
- image
- alert
- event
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
本発明は、車両の撮像部で撮影された画像を含む画像情報と、車両の挙動に関する車両情報と、気象情報のうちの少なくとも一つに基づいて、事象に対する注意を喚起する注意喚起情報を車両に配信する情報配信装置に関する。 The present invention relates to warning information for calling attention to an event based on at least one of image information including an image captured by an imaging unit of the vehicle, vehicle information regarding the behavior of the vehicle, and weather information. The present invention relates to an information distribution apparatus that distributes information to the Internet.
従来、気象(例えば、積雪)や交通事故のような事象の発生の注意を喚起するための注意喚起情報を車両に配信する情報配信装置が提案されている(例えば、特許文献1,2)。このような情報配信装置は、事象の種類及び事象の発生位置に関する事象情報を、事象を検出した車両又は事象情報を有する外部サーバ(例えば、気象情報提供サーバ、道路交通情報提供サーバ)から受信し、受信した事象情報に基づいて、注意喚起情報を事象の発生位置付近の車両に配信する。
2. Description of the Related Art Conventionally, information distribution apparatuses that distribute alert information for alerting the occurrence of events such as weather (for example, snow) or traffic accidents to vehicles have been proposed (for example,
注意喚起情報の緊急な配信が要求されるか否かは、事象の種類に基づいて決定される。例えば、事象が交通事故等の交通情報に関する場合には、注意喚起情報の緊急な配信が要求されるが、事象が積雪等の気象に関するものである場合には、必ずしも注意喚起情報の緊急な配信が要求されず、事象情報が事象の発生位置の現在の状況を正確に反映しているか否かの検証を行うことが要求される。しかしながら、従来の情報配信装置では、注意喚起情報の緊急な配信が要求されていない場合でも事象情報が事象の発生位置の現在の状況を正確に反映しているか否かの検証が行われていない。 Whether or not urgent delivery of alert information is required is determined based on the type of event. For example, when an event relates to traffic information such as a traffic accident, urgent delivery of alert information is required, but when an event relates to weather such as snowfall, urgent delivery of alert information is not necessarily required Is required, and it is required to verify whether or not the event information accurately reflects the current state of the event occurrence position. However, in the conventional information distribution apparatus, even when urgent distribution of the alert information is not requested, it is not verified whether the event information accurately reflects the current state of the event occurrence position. .
また、車両側で事象の種類を判定せず、車両速度、加速度、ブレーキ操作等の車両の挙動に関する車両情報が車両から情報配信装置に送信される場合、情報配信装置が車両情報から事象の種類を判定するのが困難である。一方、情報配信装置が気象情報を外部サーバから受信し、情報配信装置が気象情報を車両に配信するときには、情報配信装置の気象情報受信時点と気象情報配信時点との間にタイムラグがある場合、気象情報が気象情報配信時点における実際の気象を正確に反映しないことがある。 In addition, when vehicle information regarding vehicle behavior such as vehicle speed, acceleration, and brake operation is transmitted from the vehicle to the information distribution device without determining the type of event on the vehicle side, the information distribution device determines the type of event from the vehicle information. Is difficult to determine. On the other hand, when the information distribution device receives weather information from an external server and the information distribution device distributes the weather information to the vehicle, if there is a time lag between the weather information reception time and the weather information distribution time of the information distribution device, The weather information may not accurately reflect the actual weather at the time of weather information distribution.
さらに、発生した事象を正確に判断するために、車両の撮像部で撮影された画像を含む画像情報が車両情報とともに車両から情報配信装置に送信される場合、画像情報の容量が大きく、かつ、車両と情報配信装置との間のネットワークの通信容量に限界がある。したがって、これら画像情報及び車両情報が車両から情報配信装置まで到達する時間が長くなる Furthermore, in order to accurately determine the event that has occurred, when image information including an image captured by the imaging unit of the vehicle is transmitted from the vehicle to the information distribution device together with the vehicle information, the capacity of the image information is large, and There is a limit to the communication capacity of the network between the vehicle and the information distribution device. Accordingly, it takes a long time for the image information and the vehicle information to reach the information distribution device from the vehicle.
本発明の目的は、事象に対する注意を喚起する注意喚起情報を、事象が発生しているか否かを状況に応じて確認した後に配信することができる情報配信装置を提供することである。 An object of the present invention is to provide an information distribution device capable of distributing attention-calling information for calling attention to an event after confirming whether or not the event has occurred according to the situation.
本発明による情報配信装置は、車両の撮像部で撮影された画像を含む画像情報と、車両の挙動に関する車両情報と、気象情報のうちの少なくとも一つに基づいて、事象に対する注意を喚起する注意喚起情報を車両に配信する情報配信装置であって、前記車両情報と前記気象情報のうちの少なくとも一つを取得する第1情報取得手段と、前記第1情報取得手段が取得した前記車両情報と前記気象情報のうちの少なくとも一つに基づいて、前記画像情報の送信を車両に対して要求するか否かを判定する画像送信要求判定手段と、前記画像送信要求判定手段が前記画像情報の送信を要求すると判定した場合、前記画像情報の送信要求を車両に対して出力する出力手段と、前記画像情報の送信要求に応じた車両から前記画像情報を取得する第2情報取得手段と、前記第2情報取得手段が取得した画像情報に基づいて、前記注意喚起情報を車両に配信するか否かを判定する注意喚起情報配信判定手段と、前記注意喚起情報配信判定手段が前記注意喚起情報を車両に配信すると判定した場合、前記注意喚起情報を車両に配信する第1注意喚起情報配信手段と、を有することを特徴とする。 The information distribution device according to the present invention calls attention to an event based on at least one of image information including an image captured by an imaging unit of the vehicle, vehicle information regarding the behavior of the vehicle, and weather information. An information distribution device for distributing arousal information to a vehicle, wherein the vehicle information and the meteorological information acquire at least one of the vehicle information and the vehicle information acquired by the first information acquisition unit. Based on at least one of the weather information, an image transmission request determining means for determining whether to request the vehicle to transmit the image information; and the image transmission request determining means for transmitting the image information. Output means for outputting the image information transmission request to the vehicle, and second information acquisition for acquiring the image information from the vehicle in response to the image information transmission request. And means for determining whether or not to deliver the alert information to the vehicle based on the image information acquired by the second information acquisition means, and the alert information distribution determining means includes: And a first alert information delivery means for delivering the alert information to the vehicle when it is determined that the alert information is to be delivered to the vehicle.
本発明によれば、車両情報と気象情報のうちの少なくとも一つに基づいて、画像情報の送信を車両に対して要求すると判定した場合、画像情報の送信要求を車両に対して出力し、画像情報の送信要求に応じた車両からの画像情報に基づいて、前記注意喚起情報を車両に配信するか否かを判定する。したがって、注意喚起情報を、事象が発生しているか否かを状況に応じて確認した後に配信することができる。 According to the present invention, when it is determined to request the vehicle to transmit image information based on at least one of the vehicle information and the weather information, the image information transmission request is output to the vehicle, and the image Based on the image information from the vehicle according to the information transmission request, it is determined whether or not to deliver the alert information to the vehicle. Therefore, the alert information can be distributed after confirming whether or not an event has occurred according to the situation.
以下、本発明に係る実施の形態を、図面を参照して詳細に説明する。なお、本発明の技術的範囲はこれらの実施の形態に限定されず、特許請求の範囲に記載された発明とその均等物に及ぶ。また、本発明の趣旨を逸脱しない範囲において種々の変更を付加した形態で実施することも可能である。 Embodiments according to the present invention will be described below in detail with reference to the drawings. The technical scope of the present invention is not limited to these embodiments, but covers the invention described in the claims and equivalents thereof. Moreover, it is also possible to implement with the form which added the various change in the range which does not deviate from the meaning of this invention.
図1は、本発明による情報配信装置を含む全体システムを示す図である。
車両100−1,100−2,...,100−nは、後に詳細に説明するように、インターネット接続プロバイダ200を介してインターネット300に接続することができ、Web上の情報配信装置としてのセンタ400にアクセス可能に構成されている。また、センタ400は、複数の車両100−1,100−2,...,100−nを同時に制御するために、インターネット500を介して外部サーバ600,700,800から入手した各種情報を内部データベースに記録し、車両100−1,100−2,...,100−nに対して各種情報を配信できるように構成されている。
FIG. 1 is a diagram showing an entire system including an information distribution apparatus according to the present invention.
Vehicles 100-1, 100-2,. . . , 100-n can be connected to the Internet 300 via the
車両100−1,100−2,...,100−nには、第1カメラ1−1,1−2,...,1−n、第2カメラ2−1,2−2,...,2−n、GPS(Global Positioning System;全地球測位システム)受信機3−1,3−2,..,3−n等と接続されたドライブレコーダ4−1,4−2,...,4−nがそれぞれ搭載されている。ドライブレコーダ4−1,4−2,...,4−nは、ACCスイッチがONの間に、第1カメラ1−1,1−2,...,1−n及び第2カメラ2−1,2−2,...,2−nで撮像した画像データを第2RAM5−1,5−2,...,5−nに常時記録し、第2RAM5−1,5−2,...,5−nに記録された画像データを所定の単位(例えば、ファイル単位)ごとに、インターフェイス(I/F)6−1,6−2,..,6−nに挿入されたメモリカード7−1,7−2,...,7−nに書き込む。また、ドライブレコーダ4−1,4−2,...,4−nはそれぞれ、信号処理装置8−1,8−2,...,8−nと接続された通信部9−1,9−2,...,9−nを介して、インターネット接続プロバイダ200との通信が可能になる。したがって、車両100−1,100−2,...,100−nの信号処理装置8−1,8−2,...,8−n及び/又はドライブレコーダ4−1,4−2,...,4−nと、センタ400は、相互に、画像データ等を含む情報データの送受信を行えるように構成されている。信号処理装置8−1,8−2,...,8−n及び通信部9−1,9−2,...,9−nはそれぞれ、CPU、ROM、RMA等を含んで構成され、データ変換、データ圧縮等の信号処理、ドライブレコーダ4−1,4−2,...,4−nとセンタ400との間の画像データ等を含む情報データの送受信等の処理を行う。なお、通信部9−1,9−2,...,9−nを、携帯電話のような携帯端末によって構成することもできる。
Vehicles 100-1, 100-2,. . . , 100-n include first cameras 1-1, 1-2,. . . , 1-n, second cameras 2-1, 2-2,. . . , 2-n, GPS (Global Positioning System) receivers 3-1, 3-2,. . , 3-n, etc. connected to drive recorders 4-1, 4-2,. . . , 4-n are mounted. Drive recorders 4-1, 4-2,. . . , 4-n, while the ACC switch is ON, the first cameras 1-1, 1-2,. . . , 1-n and second cameras 2-1, 2-2,. . . , 2-n, image data picked up by the second RAM 5-1, 5-2,. . . , 5-n, the second RAM 5-1, 5-2,. . . , 5-n, the interface (I / F) 6-1, 6-2,. . , 6-n, memory cards 7-1, 7-2,. . . , 7-n. The drive recorders 4-1, 4-2,. . . , 4-n are signal processing devices 8-1, 8-2,. . . , 8-n connected to the communication units 9-1, 9-2,. . . , 9-n, communication with the
車両100−1,100−2,...,100−nのドライブレコーダ4−1,4−2,...,4−nはそれぞれ、GPS受信機3−1,3−2,..,3−nによって取得した現在位置情報を、センタ400へ情報データの一部として所定時間間隔で送信しているので、センタ400側では、逐次各車両100−1,100−2,...,100−nの現在位置を把握することができる。また、車両100−1,100−2,...,100−nのドライブレコーダ4−1,4−2,...,4−nはそれぞれ、事象の種類(例えば、事故や災害の発生、天候及び障害物)及び事象の発生位置に関する事象情報を、現在位置情報、時刻情報及び後に詳細に説明する重加速度情報に基づいて作成し、作成された事象情報をセンタ400に送信する。なお、車両100−1,100−2,...,100−nのドライブレコーダ4−1,4−2,...,4−nはそれぞれ、事象情報を作成する代わりに、車両速度、加速度、ブレーキ操作等の車両の挙動に関する車両情報を作成し、作成された車両情報をセンタ400に送信し、センタ400が事象情報を車両情報に基づいて作成することもできる。
Vehicles 100-1, 100-2,. . . , 100-n drive recorders 4-1, 4-2,. . . , 4-n are respectively GPS receivers 3-1, 3-2,. . , 3-n is transmitted to the
図2は、事象情報の一例を示す図である。事象情報は、事象が発生する度に作成され、図2Aに示す例では、2010年2月21日18時12分37秒に三宮で積雪が発生したことを知らせる事象情報を示し、図2Bに示す例では、2010年2月21日18時34分15秒に三宮で交通事故が発生したことを知らせる事象情報を示し、図2Cに示す例では、2010年2月21日16時53分11秒に元町で障害物が発生したことを知らせる事象情報を示す。 FIG. 2 is a diagram illustrating an example of event information. The event information is created every time an event occurs. In the example shown in FIG. 2A, the event information indicating that snow has occurred in Sannomiya at 18:12:37 on February 21, 2010 is shown in FIG. 2B. In the example shown, event information notifying that a traffic accident has occurred in Sannomiya at 18:34:15 on February 21, 2010 is shown. In the example shown in FIG. 2C, 16:53:11 on February 21, 2010 Shows event information notifying that an obstacle has occurred in Motomachi per second.
また、センタ400側が車両を特定して画像送信要求する場合には、該当車両のドライブレコーダ2に記録した画像データをセンタ400に送信することもできる。また、車両が事故等に遭遇した場合には、自動的に該当車両のドライブレコーダ2に記録された画像データをセンタ400に送信するように構成することも可能である。
Further, when the
車両100−1,100−2,...,100−nには、GPS受信機3−1,3−2,..,3−n等と接続されたナビゲーション装置10−1,10−2,...,10−nもそれぞれ搭載されている。ナビゲーション装置10−1,10−2,...,10−nは、地図データデータベースから地図データを読み出し、地図データ上で車両100−1,100−2,...,100−nの走行経路を探索する。ナビゲーション装置10−1,10−2,...,10−nもそれぞれ、信号処理装置8−1,8−2,...,8−nと接続された通信部9−1,9−2,...,9−nを介して、インターネット接続プロバイダ200との通信が可能になる。したがって、車両100−1,100−2,...,100−nの信号処理装置8−1,8−2,...,8−n及び/又はナビゲーション装置10−1,10−2,...,10−nと、センタ400は、相互に、走行経路に関する走行経路情報等を含む情報データの送受信を行えるように構成されている。信号処理装置8−1,8−2,...,8−n及び通信部9−1,9−2,...,9−nはそれぞれ、ナビゲーション装置10−1,10−2,...,10−nとセンタ400との間の走行経路情報等を含む情報データの送受信等の処理も行う。
Vehicles 100-1, 100-2,. . . , 100-n include GPS receivers 3-1, 3-2,. . , 3-n, etc., connected to the navigation devices 10-1, 10-2,. . . , 10-n are also mounted. Navigation devices 10-1, 10-2,. . . , 10-n read the map data from the map data database, and the vehicles 100-1, 100-2,. . . , 100-n travel route is searched. Navigation devices 10-1, 10-2,. . . , 10-n are also signal processing devices 8-1, 8-2,. . . , 8-n connected to the communication units 9-1, 9-2,. . . , 9-n, communication with the
図1に示すドライブレコーダ4−1,4−2,...,4−n、信号処理装置8−1,8−2,...,8−n、通信部9−1,9−2,...,9−n及びナビゲーション装置10−1,10−2,...,10−nはそれぞれ、車両100−1,100−2,...,100−n側のデータ送信システムとして機能する。なお、本実施形態では、ドライブレコーダ4−1,4−2,...,4−n、信号処理装置8−1,8−2,...,8−n、通信部9−1,9−2,...,9−n及びナビゲーション装置10−1,10−2,...,10−nは別体として記載したが、これらを一体的に構成しても良い。また、車両100−1,100−2,...,100−nは、100−1,100−2,...,100−nを省略することもできる。 The drive recorders 4-1, 4-2,. . . , 4-n, signal processing devices 8-1, 8-2,. . . , 8-n, communication units 9-1, 9-2,. . . , 9-n and navigation devices 10-1, 10-2,. . . , 10-n are vehicles 100-1, 100-2,. . . , 100-n side data transmission system. In the present embodiment, the drive recorders 4-1, 4-2,. . . , 4-n, signal processing devices 8-1, 8-2,. . . , 8-n, communication units 9-1, 9-2,. . . , 9-n and navigation devices 10-1, 10-2,. . . , 10-n are described as separate bodies, but they may be integrally formed. Further, the vehicles 100-1, 100-2,. . . , 100-n are 100-1, 100-2,. . . , 100-n can be omitted.
インターネット接続プロバイダ200は、複数の基地局201と接続された移動通信網202を有しており、移動通信網202と接続されたゲートウエイ203を介してインターネット300への接続サービスを提供する。
The
センタ400は、制御部401、インターネット300,500と接続するためのルータのような通信部402、ユーザプロファイル情報を記録するためのユーザプロファイル情報記録部403、画像データ、走行経路情報等を含むコンテンツ情報を記録するためのコンテンツ情報記録部404、選択履歴情報を記録するためのコンテンツ選択履歴情報記録部405等を有し、それぞれがLAN406により相互にテータの送受信を行えるように構成されている。
The
制御部401は、パーソナルコンピュータ等より構成され、後に詳細に説明するように、CPU,RAM、ROM、キーボード及びマウス等を含む操作部、液晶ディスプレイ等を含む表示部、ハードディスク等のデータ記録部等を含んで構成されている。制御部401は、車両100−1,100−2,...,100−n又は外部サーバ600−1,600−2,...,600−nから受信した情報に基づいて、各種情報を車両100−1,100−2,...,100−nへ配信する。また、センタ400は、所定のタイミングで、インターネット500を介して外部サーバ600,700,800のWebサイトにアクセスし、特定位置及び特定位置における事象の状況に関する特定位置情報のような各種情報を取得して、コンテンツ情報記録部404に蓄積する。また、センタ400は、センタ400にアクセスするユーザ(例えば、車両100−1,100−2,...,100−n)に対応したユーザプロファイルを作成してユーザプロファイル情報記録部403に記録するとともに、ユーザとの通信のたびに取得した各種情報についてもユーザプロファイル情報記録部403に追加的に記録する。さらに、センタ400は、センタ400にアクセスするユーザが選択したコンテンツ情報記録部404の情報の履歴に関するコンテンツ選択履歴情報を、コンテンツ選択履歴情報記録部405に記録する。
The
本実施の形態では、外部サーバ600は、交通情報センタとして機能し、センタ400と同様に、制御部601、通信部602、ユーザプロファイル情報記録部603、コンテンツ情報記録部604、コンテンツ選択履歴情報記録部605等を有し、それぞれがLAN606により相互にテータの送受信を行えるように構成されているが、コンテンツ情報記録部604は、交通事故のような複数の事象にそれぞれ対応する複数の事象情報等を含む道路交通情報をコンテンツ情報として記録する。
In the present embodiment, the
本実施の形態では、外部サーバ700は、気象情報センタとして機能し、センタ400と同様に、制御部701、通信部702、ユーザプロファイル情報記録部703、コンテンツ情報記録部704、コンテンツ選択履歴情報記録部705等を有し、それぞれがLAN706により相互にテータの送受信を行えるように構成されているが、コンテンツ情報記録部704は、積雪のような複数の事象にそれぞれ対応する複数の事象情報等を含む気象情報をコンテンツ情報として記録する。
In the present embodiment, the
本実施の形態では、外部サーバ800は、特定位置情報を提供する地域情報センタとして機能し、センタ400と同様に、制御部801、通信部802、ユーザプロファイル情報記録部803、コンテンツ情報記録部804、コンテンツ選択履歴情報記録部805等を有し、それぞれがLAN806により相互にテータの送受信を行えるように構成されているが、コンテンツ情報記録部804は、特定位置情報をコンテンツ情報として記録し、特定位置情報を記憶するデータベースが構築されている。
In the present embodiment, the
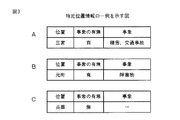
図3は、特定位置情報の一例を示す図である。特定位置情報は、事象の有無に関係なく特定位置ごとに作成され、図3Aに示す例では、三宮に積雪及び交通事故の事象が存在することを示し、図3Bに示す例では、元町に障害物の事象が存在することを示し、図3Cに示す例では、兵庫に事象が存在しないことを示す。 FIG. 3 is a diagram illustrating an example of the specific position information. The specific location information is created for each specific location regardless of whether or not there is an event. In the example shown in FIG. 3A, it indicates that there is a snow and traffic accident event in Sannomiya. In the example shown in FIG. It shows that there is a physical event, and the example shown in FIG. 3C shows that there is no event in Hyogo.
図4は、図1のドライブレコーダのブロック図である。なお、図4において、ドライブレコーダ4−1について説明するが、ドライブレコーダ4−2,4−3は、ドライブレコーダ4−1と同一構成及び同一動作を有するので、ドライブレコーダ4−2,4−3についての説明は、ここでは省略する。 FIG. 4 is a block diagram of the drive recorder of FIG. In FIG. 4, the drive recorder 4-1 will be described. Since the drive recorders 4-2 and 4-3 have the same configuration and the same operation as the drive recorder 4-1, the drive recorders 4-2 and 4-2. The description of 3 is omitted here.
ドライブレコーダ4−1は映像記録専用の装置として第1カメラ1−1又は第2カメラ2−1と分離して構成することもできるが、第1カメラ1−1、第2カメラ1−2及びマイクロフォン11と同一の筐体内に収容して一体的に構成してもよい。
The drive recorder 4-1 can be configured separately from the first camera 1-1 or the second camera 2-1 as a video recording dedicated device, but the first camera 1-1, the second camera 1-2, The
第1カメラ1−1は、車両100−1の前方を撮影してアナログのビデオ信号を映像情報101として出力するよう制御され、例えば二次元イメージセンサとしてCCDイメージセンサ(Charge Coupled Device Image Sensor)やCMOSイメージセンサ(Complementary Metal Oxide Semiconductor Image Sensor)から構成される。
The first camera 1-1 is controlled to take an image of the front of the vehicle 100-1 and output an analog video signal as the
第2カメラ1−2は、2台目のカメラとして車両100−1に設置され、車両後方や車室内等の第1カメラ1−1と異なる方向を撮影してアナログのビデオ信号を映像情報602として出力するよう制御される。また、第2カメラ2−1も二次元イメージセンサとしてCCDイメージセンサやCMOSイメージセンサから構成される。なお、カメラを1台のみ必要とする場合には第2カメラ2−1を接続する必要はない。
The second camera 1-2 is installed in the vehicle 100-1 as a second camera, takes a different direction from the first camera 1-1 such as the rear of the vehicle or the passenger compartment, and outputs an analog video signal as the
加速度センサ12は、車両100−1に加わる衝撃の大きさを重力加速度として検出する、いわゆるGセンサ(Gravity Accelerative Sensor)で構成される。衝撃を受けるとその重力加速度に基づいた電流を発生する半導体からなり、車両の前後方向及び左右方向の重力加速度の大きさを検出し、重力加速度情報103をCPU(Central Processing Unit)13−1へ出力する。
The
メモリカード7−1は、ドライブレコーダ4−1から取り外し可能な記録媒体であり、プログラム可能な不揮発性半導体メモリカードであるCFカード(Compact Flash Card)、SDカード(Secure Digital Memory Card)やメモリスティック等から構成される。 The memory card 7-1 is a recording medium removable from the drive recorder 4-1, and is a programmable nonvolatile semiconductor memory card such as a CF card (Compact Flash Card), an SD card (Secure Digital Memory Card), or a memory stick. Etc.
なお、本実施形態では取り外し可能な記憶媒体としてメモリカードを用いているが、必ずしもこれに限定されるものではなく、取り外し可能な他のメモリカード、ハードディスク等を利用することもできる。また、再生装置として同じ車両100−1に搭載されたナビゲーション装置10−1を利用することができる。その場合には、メモリカード7−1等に記録した画像データをハーネスを介してナビゲーション装置10−1に送信すればよい。 In this embodiment, a memory card is used as a removable storage medium. However, the present invention is not necessarily limited to this, and other removable memory cards, hard disks, and the like can be used. Moreover, the navigation apparatus 10-1 mounted in the same vehicle 100-1 as a reproducing | regenerating apparatus can be utilized. In that case, what is necessary is just to transmit the image data recorded on the memory card 7-1 etc. to the navigation apparatus 10-1 via a harness.
マイクロフォン11は、CPU13−1と電気的に接続され、車両100−1の車室内または車外の音声を集音して音声情報104としてCPU13−1へ送信するよう構成される。音声情報104はCPU13−1内のアナログ/デジタル変換器でデジタル信号に変換される。なお、道路上の騒音を不必要に集音しないように、マイクロフォンの正面の感度が高い単一指向性マイクロフォンを用いるとよい。
The
GPS受信機3−1は、複数のGPS衛星から衛星の軌道と、衛星に搭載された原子時計からの時刻データを含む電波信号を受信し、受信した電波の時間差により各衛星との相対的距離差を算出して現在地情報を得る。3個の衛星の電波を捉えれば地球上の平面での位置が判別できる。GPS受信機3−1は、かかる現在地情報を検出すると、位置情報及び時刻情報からなるGPS情報105をCPU13−1へ送信する。
The GPS receiver 3-1 receives a radio signal including the satellite's orbit from a plurality of GPS satellites and time data from an atomic clock mounted on the satellite, and the relative distance to each satellite by the time difference of the received radio waves. The current location information is obtained by calculating the difference. By capturing the radio waves of the three satellites, the position on the plane on the earth can be determined. When the GPS receiver 3-1 detects the current location information, the GPS receiver 3-1 transmits
車速センサ14は、車両100−1の車輪軸に設けられたローターの回転を回転パルス信号106として出力し、磁気センサまたは光センサにより構成される。なお、CPU13−1は車速センサ14から受信するパルス信号から単位時間当たりの車輪回転数を算出することで車両100−1の速度情報を算出している。
The
I/F6−1は、ドライブレコーダ4−1に設けられたメモリカード7−1の差込口、いわゆるスロット部を構成する。I/F6−1は、ドライブレコーダ4−1から送信される画像データ等を含む記録情報107を、差し込まれたメモリカード7−1へ記録するデータ記録部として機能する。
The I / F 6-1 constitutes a so-called slot portion of a memory card 7-1 provided in the drive recorder 4-1. The I / F 6-1 functions as a data recording unit that records the
ビデオスイッチ(以下「ビデオSW」)15は、複数のカメラが設けられる場合に撮影するカメラを切り換えるためのスイッチである。本実施の形態では、第1カメラ1−1及び第2カメラ2−1が接続され、CPU13−1からの選択信号108により一方のカメラが選択されるよう構成されている。選択されたカメラからの映像情報を選択映像情報109として出力する。なお、ビデオSW15に計時機能を持たせ、一定の時間間隔で切り換えを行うように構成してもよい。
The video switch (hereinafter “video SW”) 15 is a switch for switching a camera to be photographed when a plurality of cameras are provided. In the present embodiment, the first camera 1-1 and the second camera 2-1 are connected, and one camera is selected by a
画像処理回路16は、第1カメラ1−1及び第2カメラ2−1からビデオSW15を介して入力される選択映像情報109をデジタル信号に変換し、画像データ110を作成して出力する。画像処理回路16は、例えば、JPEG−IC(Joint Photographic coding Experts Group−Integrated Circuit)から構成され、JPEG形式のデータを作成する。
The
第1RAM17は、画像処理回路16によって変換された画像データ110を一時的に記憶する。なお、第1RAM17はCPU13−1内のDMA(Direct Memory Access)回路と接続されている。
The
第2RAM15は、画像処理回路13により画像データ110に変換された映像情報を常時記憶する。なお、第1RAM14及び第2RAM15には、例えばSDRAM(Synchronous Dynamic Random Access Memory)が用いられる。SDRAMはCPUのクロックに同期して動作するよう設計されているため、入出力の待ち時間が短く、従来のDRAM(Dynamic Random Access Memory)に比較してアクセスを高速に行うことができ、大容量の映像データを高速に処理する制御に適しているためである。
The
不揮発性ROM19は、ドライブレコーダ4−1を構成するハードウェア資源を統括的に制御するための制御プログラム20等を記憶する。不揮発性ROM19には、マスクROMを用いてもよいが、プログラム可能な不揮発性半導体メモリであるフラッシュメモリ、EEPROM(Erasable Programmable Read Only Memory)、強誘電体メモリ等を用いればプログラムの書き込みや消去が可能となる。
The
制御プログラム20は、不揮発性ROM19内に記憶され、ドライブレコーダ4−1の起動時にCPU13−1に読み出され、各部の制御やデータ演算処理のプログラムとして機能する。
The
表示灯21は、発光ダイオード等からなり、CPU13−1から電源が供給されることによりドライブレコーダ4−1の起動中は点灯し、ユーザへ起動中であることを報知する。また、ドライブレコーダ4−1に異常が生じた場合には、CPU13−1が表示灯21を点滅させることにより異常の発生をユーザへ報知するよう構成されている。
The
アクセサリスイッチ(ACCスイッチ)22は、車両100−1に備えられたエンジン始動用のキーシリンダと電気的に一体に構成されている。ユーザのキー操作によりスイッチがオンとされるとアクセサリオン信号111をドライブレコーダ4−1へ送信する。ドライブレコーダ4−1はACCスイッチ22のアクセサリオン信号111を受信することにより、制御を開始する。なお、ACCスイッチ22の出力信号に代わりに、イグニッションキー出力信号を利用することも可能である。
The accessory switch (ACC switch) 22 is electrically integrated with a key cylinder for engine start provided in the vehicle 100-1. When the switch is turned on by the user's key operation, an accessory on signal 111 is transmitted to the drive recorder 4-1. The drive recorder 4-1 starts the control by receiving the accessory on signal 111 of the
電源スイッチ(電源SW)23は、ユーザによりスイッチ操作がなされると、電源オン信号をドライブレコーダ4−1へ送信する。ACCスイッチ22をオンさせずにドライブレコーダ4−1を動作させたい場合に用いることができる。
The power switch (power SW) 23 transmits a power-on signal to the drive recorder 4-1 when the user performs a switch operation. This can be used when it is desired to operate the drive recorder 4-1 without turning on the
バッテリ24は、車両100−1内に備えられ、ドライブレコーダ4−1の本体に電源を供給する。また、バッテリ24は、電源制御回路25及びバックアップバッテリ26へ電源を供給する。なお、バッテリ24は車両100−1に装備可能で12Vの起電力を発生できるものであればよい。
The
電源制御回路25は、CPU13−1に接続されACCスイッチ22からのオン信号を受信することで、バッテリ24からの電源をCPU13−1及びドライブレコーダ4−1の各部へ供給する。また、電源SW23が操作されたことを検知すると、ACCスイッチ22の状態に関わらず電源の供給を開始する。さらに電源制御回路25はACCスイッチ22又は電源SW22のオフを検知することにより、終了信号をCPU13−1へ送信する。終了信号を受信したCPU13−1は、制御の終了処理として電源制御回路25にオフ信号を送信する。これにより、電源制御回路25が電源の供給を停止する。
The power
バックアップバッテリ(B/Uバッテリ)26は、コンデンサ等から構成され、バッテリ24からの電源をCPU13−1及びドライブレコーダ4−1の各部へ供給するよう接続されている。衝突事故等により車両に衝撃が加わると、バッテリ24の破損やバッテリ24と電源制御回路25と接続線の断線が発生する恐れがある。この場合、B/Uバッテリ26は、蓄電された電源をCPU13−14等へ供給することで、ドライブレコーダ4−1の電源のバックアップを行う。
The backup battery (B / U battery) 26 is composed of a capacitor or the like, and is connected to supply power from the
CPU13−1は、ドライブレコーダ4−1の制御装置として動作し、マイクロコンピュータ等により構成される。CPU13−1は、制御プログラム20に基づき、ドライブレコーダ4−1の各部の制御やデータ演算処理等を実行し、車両情報を作成し、作成した車両情報を第2RAM15に格納する。なお、CPU13−1は、事象情報を車両情報に基づいて作成し、作成した事象情報を第2RAM15に格納することもできる。
The CPU 13-1 operates as a control device for the drive recorder 4-1, and is configured by a microcomputer or the like. Based on the
図5は、図1のナビゲーション装置のブロック図である。なお、図5において、ナビゲーション装置10−1について説明するが、ナビゲーション装置10−2,10−3は、ナビゲーション装置10−1と同一構成及び同一動作を有するので、ナビゲーション装置10−2,10−3についての説明は、ここでは省略する。 FIG. 5 is a block diagram of the navigation device of FIG. In FIG. 5, the navigation device 10-1 will be described. Since the navigation devices 10-2 and 10-3 have the same configuration and the same operation as the navigation device 10-1, the navigation devices 10-2 and 10- The description of 3 is omitted here.
ナビゲーション装置10−1は、CPU31、RAM32、不揮発性ROM33、地図情報記憶部34、受信情報記憶部35、探索経路情報記憶部36等を有しており、車両100−1に配置された液晶表示装置等から構成される表示部37、表示部37の表示画面上に配置されたタッチパネル、各種ボタン等から構成される操作部38、車両100−1に配置されたスピーカ39、車両100−1の現在位置を測定するためのGPS受信機3−1、車両100−1の車輪軸に設けられたローターの回転を回転パルス信号106として出力する車速センサ14等と接続されている。
The navigation device 10-1 includes a
ナビゲーション装置10−1は、GPS受信機3−1が受信する車両の現在位置情報及び車速センサ14からの車速パルスに基づく車速情報に基づいて、地図情報記憶部419に記憶された地図データを利用し、車両の現在位置及び操作部35によって設定された目的地までの経路を探索し、探索した経路をディスプレイ10上に表示して、運転者に対してナビゲーション動作を行うように構成されている。
The navigation device 10-1 uses the map data stored in the map
また、ナビゲーション装置10−1は、センタ400にアクセスし、コンテンツ情報記録部404に記憶されている最新の各種情報をダウンロードして、記憶部33に記録する。最新の各種情報のダウンロードは、例えば、車両100−1がセンタ400と接続されから所定時間後、センタ400における最新事故情報の更新期日に対応した所定期間毎(1時間毎、1日毎、1週間毎等)等に、行われる。
In addition, the navigation device 10-1 accesses the
RAM32は、CPU31によって演算された演算値等を一時的に記憶するために利用される。RAM32には、例えばSDRAMが用いられる。不揮発性ROM33は、ナビゲーション装置10−1を構成するハードウェア資源を統括的に制御するための制御プログラム40等を記憶する。不揮発性ROM33には、例えば、EEPROM、強誘電体メモリ等が用いられる。
The
制御プログラム40は、不揮発性ROM33内に記憶され、ナビゲーション装置10−1の起動時にCPU31に読み出され、各部の制御やデータ演算処理のプログラムとして機能する。
The
CPU31は、ナビゲーション装置10−1の制御装置として動作し、マイクロコンピュータ等により構成される。CPU31は、制御プログラム40に基づき、ナビゲーション装置10−1の各部の制御やデータ演算処理等を実行する。
The
操作部37は、キーボード、マウス等から構成され、オペレータがナビゲーション装置10−1を操作する場合に、CPU31への操作入力を行うための手段として利用される。
The
表示部38は、液晶表示装置等から構成され、地図データ、探索経路等を適宜表示するために利用される。スピーカ39は、表示部38に表示された地図データ、探索経路等に対応する音声案内を行うために利用される。
The
地図情報記録部34は、ハードディスク、DVD等の記録媒体によって構成され、道路情報及び制限速度情報等を含んだ地図情報が記録されている。
The map
受信情報記憶部35は、ハードディスク等の記録媒体によって構成され、センタ400から受信した各種情報等を記録するために利用される。探索経路記憶部36は、ハードディスク等の記録媒体によって構成され、探索経路を記憶するために利用される。
The reception
図6は、図1のセンタ及び外部サーバの制御部のブロック図である。なお、図6において、センタ400の制御部401について説明するが、外部サーバ600,700,800の制御部601,701,801はそれぞれ、センタ400の制御部401と同一構成及び同一動作を有するので、外部サーバ600,700,800の制御部601,701,801についての説明は、ここでは省略する。
FIG. 6 is a block diagram of the control unit of the center and the external server of FIG. 6, the
センタ400は、外部サーバ600,700,800から特定位置情報のような各種情報を受信し、車両100−1,100−2,...,100−nに注意喚起情報や注意喚起解除情報のような各種情報を配信するためだけでなく、車両100−1,100−2,...,100−nに搭載されたドライブレコーダ4−1,4−2,...,4−nから受信した画像データを検証して、事象の発生位置、事象の種類の究明等を行うためにも利用される。
The
図7は、注意喚起情報の表示例を示す図である。注意喚起情報は、センタ400の制御部401で作成され、事象の発生に対する注意を車両100−1,100−2,...,100−nに喚起する役割だけでなく、事象が発生した位置の状況の経過を車両100−1,100−2,...,100−nに知らせる役割も果たす。注意喚起情報がナビゲーション装置10−1,10−2,...,10−nに配信されると、ナビゲーション装置10−1,10−2,...,10−nのCPU31により表示部37に表示される。図7に示す例では、三宮に積雪及び5kmの交通事故渋滞があること及び元町に障害物が発生したことを知らせる注意喚起情報が表示部37に表示される。
FIG. 7 is a diagram illustrating a display example of alert information. The alerting information is created by the
図8は、注意喚起解除情報の表示例を示す図である。注意喚起解除情報は、センタ400の制御部401で作成され、注意喚起情報によって喚起された注意を解除する役割を果たす。注意喚起解除情報がナビゲーション装置10−1,10−2,...,10−nに配信されると、ナビゲーション装置10−1,10−2,...,10−nのCPU31により表示部37に表示される。図8に示す例では、三宮の積雪がなくなったこと、三宮の交通渋滞がなくなったこと及び元町の障害物が除去されたことを知らせる注意喚起解除情報が表示される。なお、注意喚起解除情報は、三宮の積雪がなくなったこと、三宮の交通渋滞がなくなったこと及び元町の障害物が除去されたことを個別に知らせることもできる。
FIG. 8 is a diagram illustrating a display example of alert release information. The alert release information is created by the
インターフェイス(I/F)411は、センタ400に設けられたメモリカード412の差込口、いわゆるスロット部を構成する。I/F411は、メモリカード412に記録された、画像情報等をセンタ400側に送信する。
The interface (I / F) 411 configures a so-called slot portion of a
RAM413は、CPU414がメモリカード412から送信された画像データの画像処理等を行う際に一時的にデータを記憶するために利用される。RAM414には、例えばSDRAMが用いられる。
The
不揮発性ROM415は、センタ400を構成するハードウェア資源を統括的に制御するための制御プログラム416等を記憶する。不揮発性ROM415には、例えば、EEPROM、強誘電体メモリ等が用いられる。
The
制御プログラム416は、不揮発性ROM415内に記憶され、センタ400の起動時にCPU414に読み出され、各部の制御やデータ演算処理のプログラムとして機能する。
The
CPU414は、センタ400の制御装置として動作し、マイクロコンピュータ等により構成される。CPU414は、制御プログラム416に基づき、センタ400の各部の制御やデータ演算処理等を実行する。
The
操作部417は、キーボード、マウス等から構成され、オペレータがセンタ400を操作する場合に、CPU414への操作入力を行うための手段として利用される。
The
表示部418は、液晶表示装置等から構成され、メモリカード412に記録された映像情報等を適宜表示するために利用される。
The
地図情報記録部419は、ハードディスク、DVD等の記録媒体によって構成され、道路情報及び制限速度情報等を含んだ地図情報が記録されている。
The map
カード情報記録部420は、ハードディスク等の記録媒体によって構成され、メモリカード412に記録された映像情報等を記録するために利用される。受信情報記憶部470は、ハードディスク等の記録媒体によって構成され、ドライブレコーダ4−1,4−2,...,4−nから受信した画像データ、外部サーバ600,700,800から受信した各種情報等を記録するために利用される。
The card
図9は、システム動作の一例のフローチャートである。なお、このフローチャートは、車両100−1,100−2,...,100−n側では、CPU13−1,31等で実行されるプログラムによって制御され、センタ440側では、CPU414で実行されるプログラムによって制御される。
FIG. 9 is a flowchart of an example of the system operation. Note that this flowchart shows the vehicles 100-1, 100-2,. . . , 100-n side is controlled by a program executed by the CPUs 13-1, 31 and the like, and on the center 440 side, it is controlled by a program executed by the
先ず、車両100−nのドライブレコーダ4−nのCPU13−nは、事象を検出したか否か判断し(ステップS1)、事象を検出したと判断すると、車両情報に基づいて生成した事象情報をセンタ400に送信する(ステップS2)。 First, the CPU 13-n of the drive recorder 4-n of the vehicle 100-n determines whether or not an event has been detected (step S1). If it is determined that an event has been detected, event information generated based on the vehicle information is generated. The data is transmitted to the center 400 (step S2).
例えば、車両100−nが積雪のある三宮の道路を走行し、車両100−nがスリップして加速度センサによって検出されたG値がCPU13−nに入力されると、CPU13−nは、検出されたG値の波形と不揮発性ROM19に格納された基準波形と比較し、比較結果により積雪があると判定する。その後、事象の種類が積雪であり、積雪が発生した位置(例えば、三宮)及び時刻(例えば、2010年2月2日18時12分37秒)を示す事象情報が、車両100−nの通信部9−nからセンタ400の通信部402に送信される。
For example, when the vehicle 100-n travels on a road in Sannomiya with snow and the vehicle 100-n slips and the G value detected by the acceleration sensor is input to the CPU 13-n, the CPU 13-n is detected. The G value waveform is compared with the reference waveform stored in the
その後、センタ400の通信部402は、車両情報に対応する事象情報を受信する(ステップS3)。このために、センタ400の通信部402及び制御部401のCPU414は、事象情報(例えば、車両情報と気象情報のうちの少なくとも一つ)を取得する機能を有する。その後、センタ400の制御部401のCPU414は、注意喚起情報を車両100−1,100−2,...,100−nに緊急に配信するか否かを、車両100−nが検出した事象の種類に基づいて判断する(ステップS4)。
Thereafter, the
例えば、事象が積雪等の天候に関するものである場合、注意喚起情報を車両100−1,100−2,...,100−nに緊急に配信する必要性が低いので、センタ400の制御部401のCPU414は、注意喚起情報を車両100−1,100−2,...,100−nに配信しない。それに対し、事象が事故や災害に関するものである場合、注意喚起情報を車両100−1,100−2,...,100−nに緊急に配信する必要性が高いので、センタ400の制御部401のCPU414は、注意喚起情報を車両100−1,100−2,...,100−nに配信する。また、事象が障害物に関するものである場合、障害物の大小に応じて注意喚起情報を車両100−1,100−2,...,100−nに配信するか否かを決定する。
For example, when the event is related to weather such as snow cover, the alert information is stored in the vehicles 100-1, 100-2,. . . , 100-n, the
注意喚起情報を車両100−1,100−2,...,100−nに配信すると判断した場合、センタ400の制御部401のCPU414は、注意喚起情報を配信する車両を判別し(ステップS5)、配信対象車両に注意喚起情報を配信する(ステップS6)。このために、センタ400の制御部401のCPU414は、事象情報(例えば、車両情報)に基づいて、注意喚起情報を車両に配信する機能と、前記注意喚起情報を配信すべき車両を、前記車両情報の発信源及び車両の位置又は走行経路に基づいて判別する機能と、を有する。配信対象車両と判断された車両100−3の通信部9−3は、注意喚起情報を受信する(ステップS7)。
The alert information is stored in the vehicles 100-1, 100-2,. . . , 100-n, the
図10は、注意喚起情報の配信の基準の一例を説明するための図である。図10に示す例によれば、車両が事象の発生位置(例えば、三宮)から1km以外にあり、かつ、車両がナビゲーション装置によってナビゲーションされていない又はナビゲーション装置によって探索された探索経路に事象発生地点が含まれない場合には、注意喚起信号が配信されず、それ以外の場合には、注意喚起信号が配信される。このような基準は、CPU414によって参照されるために不揮発性ROM415にマップとして格納される。
FIG. 10 is a diagram for explaining an example of a criterion for distributing the alert information. According to the example shown in FIG. 10, the vehicle is located at a position other than 1 km from the event occurrence position (for example, Sannomiya), and the vehicle is not being navigated by the navigation device or is located on the searched route searched by the navigation device. Is not delivered, the alert signal is not delivered, otherwise the alert signal is delivered. Such a standard is stored as a map in the
本実施の形態では、センタ400は、事象の発生位置を回避するための手段の有無を知らせる回避情報を注意喚起情報とともに車両100−1,100−2,...,100−nに配信する。このために、センタ400の制御部401のCPU414は、前記車両の走行経路に発生した事象を回避するための手段の有無を知らせる回避情報を、前記車両位置情報及び前記走行経路情報に基づいて作成する機能を有し、センタ400の通信部402及び制御部401のCPU414は、回避情報を車両に配信する機能を有する。このような回避情報は、センタ400の制御部401のCPU414により車両位置情報及び走行経路情報に基づいて作成される。図11は、回避情報の表示の一例を示す図である。図11Aに示す例では、回避手段として回避ルートa→b→d及びa→d→cを車両100−3のナビゲーション装置10−3の表示部37に表示し、図11Bに示す例では、事象の発生位置を回避するための手段が存在しないことを車両100−3のナビゲーション装置10−3の表示部37に表示している。
In the present embodiment, the
ステップS4において、注意喚起情報を車両100−1,100−2,...,100−nに配信しないと判断した場合、すなわち、事象情報が事象の発生位置の現在の状況を正確に反映しているか否かの検証を行う必要があると判断した場合、センタ400の制御部401のCPU414は、事象発生時の所定時間(例えば、5分)前後に事象位置を撮影した画像を記録した車両を判別した後に当該車両に画像を要求する(ステップS8)。このために、センタ400の制御部401のCPU414は、取得した事象情報(例えば、車両情報と前記気象情報のうちの少なくとも一つ)に基づいて、画像情報の送信を車両に対して要求するか否かを判定する機能を有し、センタ400の通信部402及び制御部401のCPU414は、画像情報の送信を要求すると判定した場合に画像情報の送信要求を車両に対して出力する機能を有する。このような車両の判別は、センタ400が取得した車両100−1,100−2,...,100−nの現在位置の履歴を参照することによって行うことができる。なお、事象発生時の所定時間前後に事象位置を撮影した画像を記録した車両が存在しない場合には、ステップS5に進むこともできる。
In step S4, the alert information is stored in the vehicles 100-1, 100-2,. . . , 100-n, that is, when it is determined that it is necessary to verify whether or not the event information accurately reflects the current state of the event occurrence position, the control of the
画像を要求された車両100−2のドライブレコーダ4−2のCPU13−2は、事象発生時の所定時間前後に事象位置を撮影した画像をメモリカード7−2から抽出し(ステップS9)、抽出した画像を含む画像情報をセンタ400に送信する(ステップS10)。 The CPU 13-2 of the drive recorder 4-2 of the vehicle 100-2 for which the image is requested extracts an image obtained by capturing the event position from the memory card 7-2 before and after a predetermined time when the event occurs (step S9). Image information including the processed image is transmitted to the center 400 (step S10).
センタ400の通信部402は、事象発生時の所定時間前後に事象位置を撮影した画像を含む画像情報を車両100−2から受信し、センタ400の制御部401のCPU414は、事象情報が事象の発生位置の現在の状況を正確に反映しているか否かの検証を行うために画像を解析する(ステップS11)。このために、センタ400の通信部402及び制御部401のCPU414は、画像情報の送信要求に応じた車両から画像情報を取得する機能を有する。このような解析は、例えば、受信した画像情報に含まれる画像と、不揮発性ROM415に格納された基準画像とを比較することによって行う。
The
画像の解析後、センタ400の制御部401のCPU414は、注意喚起情報を車両100−1,100−2,...,100−nに配信するか否かを、事象発生時の所定時間前後に事象位置を撮影した画像に基づいて、すなわち、事象情報が事象の発生位置の現在の状況を正確に反映しているか否かに基づいて判断する(ステップS12)。このために、センタ400の制御部401のCPU414は、取得した画像情報に基づいて、注意喚起情報を車両に配信するか否かを判定する機能を有する。
After the analysis of the image, the
注意喚起情報を車両100−1,100−2,...,100−nに配信すると判断した場合、センタ400の制御部401のCPU414は、図7に示すような注意喚起情報を作成し(ステップS13)、注意喚起情報を配信する車両を判別し(ステップS14)、配信対象車両に注意喚起情報を配信する(ステップS15)。このために、センタ400の制御部401のCPU414は、注意喚起情報を車両に配信すると判定した場合に注意喚起情報を車両に配信する機能を有する。配信対象車両と判断された車両100−1の通信部9−1は、注意喚起情報を受信する(ステップS16)。それに対し、注意喚起情報を車両100−1,100−2,...,100−nに配信しないと判断した場合、センタ400の制御部401のCPU414は、注意喚起情報の配信を中止する(ステップS17)。このために、センタ400の制御部401のCPU414は、注意喚起情報を車両に配信しないと判定した場合に注意喚起情報を車両に配信するのを中止する機能を有する。
The alert information is stored in the vehicles 100-1, 100-2,. . . , 100-n, the
なお、本ルーチンにおいて、注意喚起情報配送後に事象が存在しなくなったか否かを判断し、事象が存在しなくなった場合には、図8に示すような注意喚起解除情報を車両100−1,100−2,...,100−nに配送することもできる。 In this routine, it is determined whether or not the event no longer exists after the alert information is delivered. If the event no longer exists, the alert cancellation information as shown in FIG. -2,. . . , 100-n.
本実施の形態によれば、注意喚起情報を車両に配信する必要があるか否かを、先ず、事象情報受信直後に事象の種類に基づいて判断し、注意喚起情報を配信する必要がないと判断した場合、事象発生時の所定時間前後に事象位置を撮影した画像を車両に要求し、注意喚起情報を車両に配信する必要があるか否かを、事象発生時の所定時間前後に事象位置を撮影した画像に基づいて再度判断する。したがって、注意喚起情報の緊急な配信が要求されていない場合には事象情報が事象の発生位置の現在の状況を正確に反映しているか否かの検証を行うことができる情報配信装置を提供することができる。また、注意喚起情報を配信する必要がないと判断した場合にだけ画像を車両に要求しているので、事象情報を受信する度に画像を要求する場合に比べてセンタ400の負荷が軽減する。
According to the present embodiment, whether or not the alert information needs to be distributed to the vehicle is first determined based on the type of the event immediately after the event information is received, and it is not necessary to distribute the alert information. If it is determined, the image of the event position is requested from the vehicle before and after the predetermined time when the event occurs, and whether the alert information needs to be delivered to the vehicle is determined before and after the predetermined time at the event occurrence. The determination is made again based on the captured image. Accordingly, there is provided an information distribution apparatus capable of verifying whether or not event information accurately reflects the current state of the event occurrence position when urgent distribution of alert information is not requested be able to. Further, since the image is requested from the vehicle only when it is determined that it is not necessary to distribute the alert information, the load on the
図12は、システム動作の他の例のフローチャートである。なお、このフローチャートは、車両100−1,100−2,...,100−n側では、CPU13−1,31等で実行されるプログラムによって制御され、センタ440側及び外部サーバ600,700側では、CPU414で実行されるプログラムによって制御される。
FIG. 12 is a flowchart of another example of the system operation. Note that this flowchart shows the vehicles 100-1, 100-2,. . . , 100-n is controlled by a program executed by the CPUs 13-1, 31 and the like, and the center 440 side and the
図12に示す例では、外部サーバ600,700は、外部サーバ600,700に事象情報が存在するか否か判断し、(ステップS21)。事象が存在すると判断すると、事象情報をセンタ400に送信する(ステップS22)。
In the example shown in FIG. 12, the
図13は、システム動作の他の例のフローチャートである。なお、このフローチャートは、車両100−1,100−2,...,100−n側では、CPU13−1,31等で実行されるプログラムによって制御され、センタ440側及び外部サーバ600,700側では、CPU414で実行されるプログラムによって制御される。
FIG. 13 is a flowchart of another example of the system operation. Note that this flowchart shows the vehicles 100-1, 100-2,. . . , 100-n is controlled by a program executed by the CPUs 13-1, 31 and the like, and the center 440 side and the
先ず、車両100−nのドライブレコーダ4−nのCPU13−nは、車両情報を検出したか否か判断し(ステップS31)、車両情報を検出したと判断すると、車両情報をセンタ400に送信する(ステップS32)。したがって、ステップS31及びS32では、車両情報のアップロードタイミングを計り、アップロードタイミングで車両情報をアップロードしている。なお、車両情報は、位置情報(緯度・経度、リンクID)の他に、車両が走行しているレーンを示す走行レーン情報、ウィンカーの点灯を示すウィンカー点灯情報及び障害物の検知を示す障害物センサ情報のうちの少なくとも一つを有する。
First, the CPU 13-n of the drive recorder 4-n of the vehicle 100-n determines whether or not the vehicle information is detected (step S31). If it is determined that the vehicle information is detected, the vehicle information is transmitted to the
その後、センタ400の通信部402は、車両情報を受信する(ステップS33)。このために、センタ400の通信部402及び制御部401のCPU414は、事象情報(例えば、車両情報と気象情報のうちの少なくとも一つ)を取得する機能を有する。その後、センタ400の制御部401のCPU414は、車両情報に基づいて交通流を解析し(ステップS34)、解析結果に基づいて路上に障害物があるか否かを判断する(ステップS35)。
Thereafter, the
路上に障害物があるか否かの判断は、例えば、車両情報に含まれる走行レーン情報、ウィンカー点灯情報又は障害物センサ情報から判断する。路上に障害物があるか否かを走行レーン情報から判断する場合、センタ400の制御部401のCPU414は、複数の走行レーン情報のいずれにも特定のレーンに関する情報が存在しないことを検出することによって当該レーンに障害物があると判断する。路上に障害物があるか否かをウィンカー点灯情報から判断する場合、センタ400の制御部401のCPU414は、店舗の入り口ではない直線道路上の同一位置に対応する複数のウィンカー点灯情報が存在することを検出することによって当該位置に障害物があると判断する。路上に障害物があるか否かを障害物センサ情報から判断する場合、センタ400の制御部401のCPU414は、同一位置に対応する複数の障害物センサ情報を検出することによって当該位置に障害物があると判断する。
The determination as to whether there is an obstacle on the road is made from, for example, travel lane information, blinker lighting information, or obstacle sensor information included in the vehicle information. When determining from the travel lane information whether there is an obstacle on the road, the
路上に障害物がないと判断した場合、本ルーチンを終了する。それに対し、路上に障害物があると判断した場合、すなわち、路上の現在の状況を正確に反映しているか否かの検証を行う必要があると判断した場合、センタ400の制御部401のCPU414は、交通流解析により「路上に障害物あり」の判定が出た地点周辺の車両に画像の撮影(撮影画像のアップロード)を要求する(ステップS37)。このために、センタ400の制御部401のCPU414は、取得した車両情報に基づいて、画像情報の送信を車両に対して要求するか否かを判定する画像送信要求判定手段としての機能を有し、センタ400の通信部402及び制御部401のCPU414は、画像情報の送信を要求すると判定した場合に画像情報の送信要求を車両に対して出力する出力手段としての機能を有する。
If it is determined that there are no obstacles on the road, this routine is terminated. On the other hand, when it is determined that there is an obstacle on the road, that is, when it is determined that it is necessary to verify whether or not the current situation on the road is accurately reflected, the
ステップS37において画像の撮影を要求する車両の選択は、センタ400の制御部401のCPU414が「路上に障害物あり」の判定が出た地点のリンクID及び経度・緯度を参照しながら当該地点の周辺を走行する車両を特定し、特定した車両の少なくとも一部を選択することによって行われる。選択される車両の台数を、1台としてもよいが、撮影画像が不可能である場合を考慮すると複数台とするのが好ましい。
In step S37, the selection of the vehicle that requests image capturing is performed by referring to the link ID and the longitude / latitude of the point where the
画像を要求された車両100−2のドライブレコーダ4−2のCPU13−2は、第1カメラ1−1又は第2カメラ2−1を用いて画像を撮影し(ステップS38)、撮影した画像を含む画像情報をセンタ400に送信する(ステップS39)。 The CPU 13-2 of the drive recorder 4-2 of the vehicle 100-2 requested for the image captures an image using the first camera 1-1 or the second camera 2-1 (step S38). The included image information is transmitted to the center 400 (step S39).
センタ400の通信部402は、画像情報を車両100−2から受信し、センタ400の制御部401のCPU414は、実際に路上に障害物があるか否かの検証を行うために画像を解析する(ステップS40)。このために、センタ400の通信部402及び制御部401のCPU414は、画像情報の送信要求に応じた車両から画像情報を取得する機能を有する。このような解析は、例えば、受信した画像情報に含まれる画像と、不揮発性ROM415に格納された基準画像とを比較することによって行う。
The
画像の解析後、センタ400の制御部401のCPU414は、受信した画像情報に含まれる画像から路上の障害物が確認できるか否かに応じて、注意喚起情報を車両100−1,100−2,...,100−nに配信するか否かを判断する(ステップS41)。このために、センタ400の制御部401のCPU414は、取得した画像情報に基づいて、注意喚起情報を車両に配信するか否かを判定する機能を有する。
After the analysis of the image, the
注意喚起情報を車両100−1,100−2,...,100−nに配信しないと判断した場合、すなわち、受信した画像情報に含まれる画像から路上の障害物が確認できない場合、センタ400の制御部401のCPU414は、注意喚起情報の配信を中止し(ステップS42)、本ルーチンを終了する。このために、センタ400の制御部401のCPU414は、注意喚起情報を車両に配信しないと判定した場合に注意喚起情報を車両に配信するのを中止する機能を有する。なお、ステップS42で注意喚起情報の配信を中止した後に画像の撮影要求を再度行うためにステップS36に戻ってもよい。
The alert information is stored in the vehicles 100-1, 100-2,. . . , 100-n, that is, when an obstacle on the road cannot be confirmed from the image included in the received image information, the
それに対し、注意喚起情報を車両100−1,100−2,...,100−nに配信すると判断した場合、センタ400の制御部401のCPU414は、注意喚起情報を作成し(ステップS43)、注意喚起情報を配信する車両を判別し(ステップS44)、配信対象車両に注意喚起情報を配信する(ステップS45)。このために、センタ400の制御部401のCPU414は、注意喚起情報を車両に配信すると判定した場合に注意喚起情報を車両に配信する機能を有する。
On the other hand, the alert information is sent to the vehicles 100-1, 100-2,. . . , 100-n, the
注意喚起情報は、「車両の通行を妨げる障害がある」旨を知らせる情報を有し、受信した画像を配信できる場合には、受信した画像を、障害物を確認できる画像として注意喚起情報に含める。なお、受信した画像を配信できるか否かは、画像が肖像権、個人情報保護法等の法律上の基準を満たしているかに基づいて判断し、画像に人物やナンバープレートが映っている場合には、画像の解像度を下げたりぼかし処理を行ったりして個人が特定されないようにする。 The alert information includes information notifying that there is an obstacle that prevents the vehicle from passing, and if the received image can be distributed, the received image is included in the alert information as an image that can confirm the obstacle. . Whether or not the received image can be distributed is determined based on whether the image meets legal standards such as portrait rights and the Personal Information Protection Act, and when a person or license plate appears in the image Is used to prevent individuals from being identified by reducing the resolution of the image or performing blurring.
配信対象車両と判断された車両100−1の通信部9−1は、注意喚起情報を受信する(ステップS46)。なお、本ルーチンにおいて、注意喚起情報配送後に事象が存在しなくなったか否かを判断し、事象が存在しなくなった場合には、注意喚起情報によって喚起された注意を解除する注意喚起解除情報を車両100−1,100−2,...,100−nに配送することもできる。 The communication unit 9-1 of the vehicle 100-1 that is determined as the delivery target vehicle receives the alert information (step S46). In this routine, it is determined whether or not the event no longer exists after delivery of the alert information, and if the event no longer exists, the alert release information for releasing the alert that is triggered by the alert information is sent to the vehicle. 100-1, 100-2,. . . , 100-n.
その後、センタ400の制御部401のCPU414は、注意喚起情報を更新すべきか否か判断し(ステップS47)、注意喚起情報を更新すべきと判断すると、外部サーバ600,700に外部情報を要求する(ステップS48)。したがって、ステップS31及びS32では、注意喚起情報の更新のタイミングを計り、更新のタイミングで外部情報を要求している。
Thereafter, the
外部情報を要求された外部サーバ600,700の制御部602,702は、外部情報をコンテンツ情報記録部604,704から抽出し(ステップS49)、抽出した外部情報をセンタ400に送信する(ステップS50)。外部情報としては、例えば、路上の障害物によって渋滞、交通規制、通行止め等の交通状況の異常が発生しているか否かを判断するための障害物発生地点付近の交通情報を挙げることができる。なお、外部情報として交通情報を要求する場合には、センタ400の制御部401のCPU414は、交通情報センタとして機能する外部サーバ600に交通情報を要求する。
The
その後、センタ400の通信部402は、外部情報を受信し(ステップS51)、センタ400の制御部401のCPU414は、外部情報に基づいて交通状況に異常があるか否かを判断する(ステップS52)。交通状況に異常がない場合には、本ルーチンを終了する。それに対し、交通状況に異常がある場合には、交通状況に異常がある旨を示す情報を含めた注意喚起情報を作成するために、ステップS43に戻る。
Thereafter, the
本実施の形態によれば、一旦収集した車両情報や気象情報のような事象情報に基づいて事象を特定し、特定した事象が実際に生じているか否かを、画像情報を収集することによって再度確認する。このような確認により事象が実際に生じていると判断した場合、センタ400は、注意喚起情報を配信する。したがって、したがって、注意喚起情報を、事象が発生しているか否かを状況に応じて確認した後に配信することができる。
According to the present embodiment, an event is identified based on event information such as vehicle information and weather information once collected, and whether or not the identified event actually occurs is collected again by collecting image information. Check. When it is determined that an event has actually occurred as a result of such confirmation, the
4−1,4−2,....,4−n ドライブレコーダ
9−1,9−2,..,9−n,402,602,702,802 通信部
10−1,10−2,...,10−n ナビゲーション装置
100−1,100−2,...,100−n 車両
200 インターネット接続プロバイダ
300,500 インターネット
400 センタ
401,601,701,801 制御部
600,700,800 外部サーバ
4-1, 4-2,. . . . , 4-n Drive recorder 9-1, 9-2,. . , 9-n, 402, 602, 702, 802 communication units 10-1, 10-2,. . . , 10-n navigation devices 100-1, 100-2,. . . , 100-
Claims (6)
前記車両情報と前記気象情報のうちの少なくとも一つを取得する第1情報取得手段と、
前記第1情報取得手段が取得した前記車両情報と前記気象情報のうちの少なくとも一つに基づいて、前記画像情報の送信を車両に対して要求するか否かを判定する画像送信要求判定手段と、
前記画像送信要求判定手段が前記画像情報の送信を要求すると判定した場合、前記画像情報の送信要求を車両に対して出力する出力手段と、
前記画像情報の送信要求に応じた車両から前記画像情報を取得する第2情報取得手段と、
前記第2情報取得手段が取得した画像情報に基づいて、前記注意喚起情報を車両に配信するか否かを判定する注意喚起情報配信判定手段と、
前記注意喚起情報配信判定手段が前記注意喚起情報を車両に配信すると判定した場合、前記注意喚起情報を車両に配信する第1注意喚起情報配信手段と、
を有することを特徴とする情報配信装置。 Information for delivering alert information for alerting an event to a vehicle based on at least one of image information including an image captured by an imaging unit of the vehicle, vehicle information on vehicle behavior, and weather information A distribution device,
First information acquisition means for acquiring at least one of the vehicle information and the weather information;
Image transmission request determination means for determining whether to request the vehicle to transmit the image information based on at least one of the vehicle information and the weather information acquired by the first information acquisition means; ,
An output means for outputting a transmission request for the image information to the vehicle when the image transmission request determination means determines that the transmission of the image information is requested;
Second information acquisition means for acquiring the image information from a vehicle in response to a transmission request for the image information;
Based on the image information acquired by the second information acquisition means, attention information distribution determination means for determining whether to distribute the warning information to the vehicle;
A first alert information delivery means for delivering the alert information to the vehicle when the alert information delivery determining means determines to deliver the alert information to the vehicle;
An information distribution apparatus comprising:
前記回避情報を車両に配信する回避情報配信手段と、
を更に有する請求項5に記載の情報配信装置。 Avoidance information creating means for creating avoidance information that informs the presence or absence of means for avoiding an event that has occurred in the travel route of the vehicle based on the vehicle position information and the travel route information;
Avoidance information distribution means for distributing the avoidance information to the vehicle;
The information distribution apparatus according to claim 5, further comprising:
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010147800A JP2012014255A (en) | 2010-06-29 | 2010-06-29 | Information distribution apparatus |
| US13/807,206 US9531783B2 (en) | 2010-06-29 | 2011-03-02 | Information distribution device |
| PCT/JP2011/055442 WO2012002005A1 (en) | 2010-06-29 | 2011-03-02 | Information delivery device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010147800A JP2012014255A (en) | 2010-06-29 | 2010-06-29 | Information distribution apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012014255A true JP2012014255A (en) | 2012-01-19 |
| JP2012014255A5 JP2012014255A5 (en) | 2013-03-28 |
Family
ID=45600650
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010147800A Pending JP2012014255A (en) | 2010-06-29 | 2010-06-29 | Information distribution apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012014255A (en) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017058773A (en) * | 2015-09-14 | 2017-03-23 | 住友電気工業株式会社 | Traffic information provision system, traffic information provision device, and car onboard communication device |
| JP2017069917A (en) * | 2015-10-02 | 2017-04-06 | 株式会社東芝 | Communication processing device, on-vehicle device, and communication processing method |
| JP6157756B1 (en) * | 2014-04-04 | 2017-07-05 | フィリップス ライティング ホールディング ビー ヴィ | System and method for supporting autonomous vehicles by environmental recognition, sensor calibration and verification |
| JP2018010406A (en) * | 2016-07-12 | 2018-01-18 | 株式会社デンソー | Monitoring system |
| US10475340B2 (en) | 2016-09-27 | 2019-11-12 | Honda Motor Co., Ltd. | Traffic hindrance risk indication apparatus |
| JP2019198021A (en) * | 2018-05-10 | 2019-11-14 | 富士通株式会社 | Data collection method, data collection device, and data collection system |
| JP2020094959A (en) * | 2018-12-14 | 2020-06-18 | ヤフー株式会社 | Route search device, method for searching for route, and route search program |
| JP2020107328A (en) * | 2018-11-30 | 2020-07-09 | トヨタ モーター ノース アメリカ,インコーポレイティド | Dynamic data compression system and method used in vehicle data |
| JP2020149306A (en) * | 2019-03-13 | 2020-09-17 | 株式会社デンソー | Driving environment abnormality determination system |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001349735A (en) * | 2000-06-08 | 2001-12-21 | Denso Corp | Route setting device, and navigation system |
| JP2004348430A (en) * | 2003-05-22 | 2004-12-09 | Pioneer Electronic Corp | Urgent braking alarm in vehicle, transmission device for urgent braking information, server device, and urgent braking alarm system and method |
| JP2008065529A (en) * | 2006-09-06 | 2008-03-21 | Denso Corp | Congestion factor determination system |
| JP2009276255A (en) * | 2008-05-16 | 2009-11-26 | Alpine Electronics Inc | Method of updating map upon occurrence of disaster |
-
2010
- 2010-06-29 JP JP2010147800A patent/JP2012014255A/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001349735A (en) * | 2000-06-08 | 2001-12-21 | Denso Corp | Route setting device, and navigation system |
| JP2004348430A (en) * | 2003-05-22 | 2004-12-09 | Pioneer Electronic Corp | Urgent braking alarm in vehicle, transmission device for urgent braking information, server device, and urgent braking alarm system and method |
| JP2008065529A (en) * | 2006-09-06 | 2008-03-21 | Denso Corp | Congestion factor determination system |
| JP2009276255A (en) * | 2008-05-16 | 2009-11-26 | Alpine Electronics Inc | Method of updating map upon occurrence of disaster |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6157756B1 (en) * | 2014-04-04 | 2017-07-05 | フィリップス ライティング ホールディング ビー ヴィ | System and method for supporting autonomous vehicles by environmental recognition, sensor calibration and verification |
| JP2017520815A (en) * | 2014-04-04 | 2017-07-27 | フィリップス ライティング ホールディング ビー ヴィ | System and method for supporting autonomous vehicles by environmental recognition, sensor calibration and verification |
| JP2017058773A (en) * | 2015-09-14 | 2017-03-23 | 住友電気工業株式会社 | Traffic information provision system, traffic information provision device, and car onboard communication device |
| JP2017069917A (en) * | 2015-10-02 | 2017-04-06 | 株式会社東芝 | Communication processing device, on-vehicle device, and communication processing method |
| JP2018010406A (en) * | 2016-07-12 | 2018-01-18 | 株式会社デンソー | Monitoring system |
| US10475340B2 (en) | 2016-09-27 | 2019-11-12 | Honda Motor Co., Ltd. | Traffic hindrance risk indication apparatus |
| JP2019198021A (en) * | 2018-05-10 | 2019-11-14 | 富士通株式会社 | Data collection method, data collection device, and data collection system |
| JP2020107328A (en) * | 2018-11-30 | 2020-07-09 | トヨタ モーター ノース アメリカ,インコーポレイティド | Dynamic data compression system and method used in vehicle data |
| JP7085525B2 (en) | 2018-11-30 | 2022-06-16 | トヨタ モーター ノース アメリカ,インコーポレイティド | Dynamic data compression systems and methods used for vehicle data |
| JP2020094959A (en) * | 2018-12-14 | 2020-06-18 | ヤフー株式会社 | Route search device, method for searching for route, and route search program |
| JP2020149306A (en) * | 2019-03-13 | 2020-09-17 | 株式会社デンソー | Driving environment abnormality determination system |
| JP7363062B2 (en) | 2019-03-13 | 2023-10-18 | 株式会社デンソー | Driving environment abnormality determination system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2012002005A1 (en) | Information delivery device | |
| JP2012014255A (en) | Information distribution apparatus | |
| US11216753B2 (en) | Parking management system and parking management method | |
| JP4403640B2 (en) | Mobile security system | |
| US20140375807A1 (en) | Camera activity system | |
| JP6815262B2 (en) | Traffic violation detectors, systems, traffic violation detection methods and programs | |
| JP2004127162A (en) | Parking lot managing system and its method | |
| JPWO2007080921A1 (en) | Information recording system, information recording apparatus, information recording method, and information collection program | |
| US11527158B2 (en) | Information providing system, server, onboard device, and information providing method | |
| JP5932850B2 (en) | Information processing system, information processing method, information processing apparatus, information processing terminal, information processing program, and recording medium | |
| KR102585581B1 (en) | Parking management system | |
| JP4692000B2 (en) | Travel time calculation system and travel time calculation method | |
| JP2020013326A (en) | On-vehicle device, information processing device, information processing method, and program | |
| JP2018190199A (en) | Monitor device and crime prevention system | |
| JP2018198004A (en) | Communication apparatus, communication system, and communication method | |
| JP5473804B2 (en) | Information distribution device | |
| JP2005135070A (en) | System and device for information distribution, detecting device, and information communication terminal | |
| KR100926274B1 (en) | The camera system for producing the panorama of a map information | |
| US20220212787A1 (en) | Image capturing system, control device, control method, and storage medium | |
| JP2018190198A (en) | Monitor device and crime prevention system | |
| JP2012145376A (en) | Navigation device, navigation method and information management server | |
| JP2021026457A (en) | Image distribution device and method, and image distribution system | |
| JPWO2020039938A1 (en) | Lane pricing systems, lane pricing equipment, methods and programs | |
| JP6239331B2 (en) | Information distribution system, information terminal device | |
| WO2021106474A1 (en) | Congestion prediction system and server device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130208 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131217 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140415 |