JP2011521703A - 最小侵襲手術用器具 - Google Patents
最小侵襲手術用器具 Download PDFInfo
- Publication number
- JP2011521703A JP2011521703A JP2011511511A JP2011511511A JP2011521703A JP 2011521703 A JP2011521703 A JP 2011521703A JP 2011511511 A JP2011511511 A JP 2011511511A JP 2011511511 A JP2011511511 A JP 2011511511A JP 2011521703 A JP2011521703 A JP 2011521703A
- Authority
- JP
- Japan
- Prior art keywords
- operation unit
- direction operation
- pitch
- yaw
- pitch direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/291—Handles the position of the handle being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2939—Details of linkages or pivot points
- A61B2017/2941—Toggle linkages
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
- A61B2034/306—Wrists with multiple vertebrae
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/18—Mechanical movements
- Y10T74/1836—Rotary to rotary
- Y10T74/184—Cranks, link connected
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20238—Interlocked
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Robotics (AREA)
- Ophthalmology & Optometry (AREA)
- Surgical Instruments (AREA)
Abstract
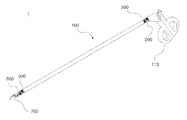
【解決手段】本発明の一態様によれば、最小侵襲手術用器具であって、所定の長さを有する長寸のシャフトと、ユーザにより手動で制御可能な調節ハンドルと、シャフトの一端に配置され、調節ハンドルの操作によって生じたピッチ及びヨー方向の動きをそれぞれ伝達するためのピッチ方向操作部及びヨー方向操作部と、シャフトの他端に配置され、それぞれピッチ方向操作部及びヨー方向操作部からの動作に対応して作動するピッチ方向動作部及びヨー方向動作部と、ピッチ方向動作部及びヨー方向動作部により制御可能なエンドエフェクタと、ピッチ方向操作部及びヨー方向操作部からの動作をそれぞれピッチ方向動作部及びヨー方向動作部に伝達するための複数のケーブルとを含む器具が提供される。
【選択図】図1
Description
Claims (17)
- 最小侵襲手術用器具であって、
所定の長さを有する長寸のシャフトと、
ユーザにより手動で制御可能な調節ハンドルと、
前記シャフトの一端に配置され、前記調節ハンドルの操作によって生じたピッチ及びヨー方向の動きをそれぞれ伝達するためのピッチ方向操作部及びヨー方向操作部と、
前記シャフトの他端に配置され、それぞれ前記ピッチ方向操作部及び前記ヨー方向操作部からの動作に対応して作動するピッチ方向動作部及びヨー方向動作部と、
前記ピッチ方向動作部及び前記ヨー方向動作部により制御可能なエンドエフェクタと、
前記ピッチ方向操作部及び前記ヨー方向操作部からの動作をそれぞれ前記ピッチ方向動作部及び前記ヨー方向動作部に伝達するための複数のケーブルとを含むことを特徴とする器具。 - 前記長寸のシャフト内に少なくとも1つの空間が形成されていることを特徴とする請求項1に記載の器具。
- 前記複数のケーブルが、前記長寸のシャフトの前記空間内に形成されていることを特徴とする請求項2に記載の器具。
- 前記調節ハンドルの開閉動作を前記エンドエフェクタに伝達するための開閉ケーブルをさらに含むことを特徴とする請求項1に記載の器具。
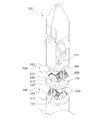
- 前記ピッチ方向操作部が、
互いから離間しかつ互いに実質的に平行に配置された1対のプレートと、
前記1対のプレートの各プレート上に少なくとも1つずつ配置された少なくとも2つの調節歯車と、
前記少なくとも2つの調節歯車のそれぞれの中心部に挿入された関節回動軸と、
前記少なくとも2つの調節歯車の噛み合いを可能にするためのリンクとを含むことを特徴とする請求項1に記載の器具。 - 前記ヨー方向操作部が、
互いから離間しかつ互いに実質的に平行に配置された1対のプレートと、
前記1対のプレートの各プレート上に少なくとも1つずつ配置された少なくとも2つの調節歯車と、
前記少なくとも2つの調節歯車のそれぞれの中心部に挿入された関節回動軸と、
前記少なくとも2つの調節歯車の噛み合いを可能にするためのリンクとを含むことを特徴とする請求項1に記載の器具。 - 前記1対のプレートに、複数のケーブル挿入孔が貫通形成されていることを特徴とする請求項5または6のいずれかに記載の器具。
- 前記リンクが、
実質的に直六面体形状の本体と、
前記本体の両端に少なくとも1つずつ形成され、前記関節回動軸の回動を可能にするように構成されている少なくとも2つの回動リングとを含むことを特徴とする請求項5または6のいずれかに記載の器具。 - 前記本体が、その長さ方向の中心軸線に沿って形成された貫通孔を有することを特徴とする請求項8に記載の器具。
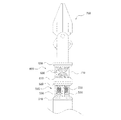
- 前記ピッチ方向動作部が、
互いから離間しかつ互いに実質的に平行に配置された1対のプレートと、
前記1対のプレートの各プレート上に少なくとも1つずつ配置された少なくとも2つの調節歯車と、
前記少なくとも2つの調節歯車のそれぞれの中心部に挿入された関節回動軸と、
前記少なくとも2つの調節歯車の噛み合いを可能にするためのリンクとを含むことを特徴とする請求項1に記載の器具。 - 前記ヨー方向動作部が、
互いから離間しかつ互いに実質的に平行に配置された1対のプレートと、
前記1対のプレートの各プレート上に少なくとも1つずつ配置された少なくとも2つの調節歯車と、
前記少なくとも2つの調節歯車のそれぞれの中心部に挿入された関節回動軸と、
前記少なくとも2つの調節歯車の噛み合いを可能にするためのリンクとを含むことを特徴とする請求項1に記載の器具。 - 前記1対のプレートに、複数のケーブル挿入孔が貫通形成されていることを特徴とする請求項10または11のいずれかに記載の器具。
- 前記リンクが、
実質的に直六面体形状の本体と、
前記本体の両端に少なくとも1つずつ形成され、前記関節回動軸の回動を可能にするように構成されている少なくとも2つの回動リングとを含むことを特徴とする請求項10または11のいずれかに記載の器具。 - 前記本体が、その長さ方向の中心軸線に沿って形成された貫通孔を有することを特徴とする請求項13に記載の器具。
- 前記複数のケーブルが、
前記ピッチ方向操作部から前記ピッチ方向動作部へ前記動作を伝達するためのピッチケーブルと、
前記ヨー方向操作部から前記ヨー方向動作部へ前記動作を伝達するためのヨーケーブルとを含むことを特徴とする請求項1に記載の器具。 - 前記ピッチケーブルが、前記ピッチ方向操作部または前記ピッチ方向動作部のいずれかに形成されているケーブル挿入孔に連結固定されていることを特徴とする請求項15に記載の器具。
- 前記ヨーケーブルが、前記ヨー方向操作部または前記ヨー方向動作部のいずれかに形成されているケーブル挿入孔に連結固定されていることを特徴とする請求項15に記載の器具。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2008-0051248 | 2008-05-30 | ||
| KR1020080051248A KR101016102B1 (ko) | 2008-05-30 | 2008-05-30 | 최소 침습 수술 도구 |
| PCT/KR2009/002833 WO2009145572A2 (en) | 2008-05-30 | 2009-05-28 | Tool for minimally invasive surgery |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014115689A Division JP6013399B2 (ja) | 2008-05-30 | 2014-06-04 | 最小侵襲手術用器具 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011521703A true JP2011521703A (ja) | 2011-07-28 |
Family
ID=41377794
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011511511A Pending JP2011521703A (ja) | 2008-05-30 | 2009-05-28 | 最小侵襲手術用器具 |
| JP2014115689A Active JP6013399B2 (ja) | 2008-05-30 | 2014-06-04 | 最小侵襲手術用器具 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014115689A Active JP6013399B2 (ja) | 2008-05-30 | 2014-06-04 | 最小侵襲手術用器具 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8801731B2 (ja) |
| EP (1) | EP2296563B1 (ja) |
| JP (2) | JP2011521703A (ja) |
| KR (1) | KR101016102B1 (ja) |
| CN (1) | CN102046101B (ja) |
| WO (1) | WO2009145572A2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017532127A (ja) * | 2014-10-02 | 2017-11-02 | リブスメド インコーポレーテッド | 手術用インストルメント |
| US10631886B2 (en) | 2014-04-24 | 2020-04-28 | Livsmed Inc. | Surgical instrument |
| US10722315B2 (en) | 2015-02-17 | 2020-07-28 | Livsmed Inc. | Instrument for surgery |
| US11172999B2 (en) | 2017-11-14 | 2021-11-16 | Livsmed Inc. | Roll joint member for surgical instrument |
| US11344381B2 (en) | 2015-02-17 | 2022-05-31 | Livsmed Inc. | Instrument for surgery |
| US11896336B2 (en) | 2015-02-17 | 2024-02-13 | Livsmed Inc. | Instrument for surgery |
Families Citing this family (68)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8814921B2 (en) | 2008-03-06 | 2014-08-26 | Aquabeam Llc | Tissue ablation and cautery with optical energy carried in fluid stream |
| US9232959B2 (en) | 2007-01-02 | 2016-01-12 | Aquabeam, Llc | Multi fluid tissue resection methods and devices |
| WO2012020386A1 (en) | 2010-08-11 | 2012-02-16 | Ecole Polytechnique Federale De Lausanne (Epfl) | Mechanical positioning system for surgical instruments |
| JP5835906B2 (ja) * | 2010-09-30 | 2015-12-24 | オリンパス株式会社 | 屈曲関節機構並びにその屈曲関節機構を有する術具及びその屈曲関節機構を有するマニピュレータ |
| US10092359B2 (en) | 2010-10-11 | 2018-10-09 | Ecole Polytechnique Federale De Lausanne | Mechanical manipulator for surgical instruments |
| JP5715304B2 (ja) | 2011-07-27 | 2015-05-07 | エコール ポリテクニーク フェデラル デ ローザンヌ (イーピーエフエル) | 遠隔操作のための機械的遠隔操作装置 |
| KR101322030B1 (ko) * | 2011-09-05 | 2013-10-28 | 주식회사 모바수 | 구형 부품을 포함하는 관절부를 갖는 최소 침습 수술 기구 |
| JP5330627B2 (ja) * | 2011-09-08 | 2013-10-30 | オリンパスメディカルシステムズ株式会社 | 多自由度鉗子 |
| KR101322104B1 (ko) * | 2011-09-08 | 2013-10-28 | 주식회사 모바수 | 착탈 가능한 엔드 이펙터를 갖는 최소 침습 수술 기구 |
| US10695141B2 (en) | 2011-11-23 | 2020-06-30 | Livsmed Inc. | Surgical instrument |
| CN104203078B (zh) | 2012-02-29 | 2018-04-20 | 普罗赛普特生物机器人公司 | 自动化图像引导的组织切除和处理 |
| WO2014016337A1 (de) * | 2012-07-24 | 2014-01-30 | Richard Wolf Gmbh | Schaft für medizinisches instrument mit beweglichen abschnitte |
| US10231867B2 (en) | 2013-01-18 | 2019-03-19 | Auris Health, Inc. | Method, apparatus and system for a water jet |
| US10744035B2 (en) | 2013-06-11 | 2020-08-18 | Auris Health, Inc. | Methods for robotic assisted cataract surgery |
| US10426661B2 (en) | 2013-08-13 | 2019-10-01 | Auris Health, Inc. | Method and apparatus for laser assisted cataract surgery |
| US10265129B2 (en) | 2014-02-03 | 2019-04-23 | Distalmotion Sa | Mechanical teleoperated device comprising an interchangeable distal instrument |
| DE102014203168A1 (de) * | 2014-02-21 | 2015-08-27 | Karl Storz Gmbh & Co.Kg | Instrument zur Durchführung medizinischer Eingriffe |
| JP2017513720A (ja) * | 2014-02-21 | 2017-06-01 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 改善された可動域を有する機械的なリストジョイント、関連装置、及び方法 |
| KR101447266B1 (ko) * | 2014-04-28 | 2014-10-10 | 정화경 | 복강경 수술장치 |
| US10390898B2 (en) | 2014-07-22 | 2019-08-27 | Intuitive Surgical Operations, Inc. | Crossed-cylinder wrist mechanism with two degrees of freedom |
| US10357320B2 (en) | 2014-08-27 | 2019-07-23 | Distalmotion Sa | Surgical system for microsurgical techniques |
| US10864049B2 (en) | 2014-12-19 | 2020-12-15 | Distalmotion Sa | Docking system for mechanical telemanipulator |
| US11039820B2 (en) | 2014-12-19 | 2021-06-22 | Distalmotion Sa | Sterile interface for articulated surgical instruments |
| WO2016097873A2 (en) | 2014-12-19 | 2016-06-23 | Distalmotion Sa | Articulated handle for mechanical telemanipulator |
| EP3653145B1 (en) | 2014-12-19 | 2024-01-24 | DistalMotion SA | Reusable surgical instrument for minimally invasive procedures |
| WO2016097864A2 (en) | 2014-12-19 | 2016-06-23 | Distalmotion Sa | Surgical instrument with articulated end-effector |
| WO2016123139A2 (en) * | 2015-01-26 | 2016-08-04 | Intuitive Surgical Operations, Inc. | Rolling-contact joint mechanisms and methods |
| WO2016137562A1 (en) * | 2015-02-25 | 2016-09-01 | Cook Medical Technologies Llc | Articulating surgical hand instrument |
| US20160287279A1 (en) | 2015-04-01 | 2016-10-06 | Auris Surgical Robotics, Inc. | Microsurgical tool for robotic applications |
| US10363055B2 (en) | 2015-04-09 | 2019-07-30 | Distalmotion Sa | Articulated hand-held instrument |
| WO2016162752A1 (en) | 2015-04-09 | 2016-10-13 | Distalmotion Sa | Mechanical teleoperated device for remote manipulation |
| US10786272B2 (en) | 2015-08-28 | 2020-09-29 | Distalmotion Sa | Surgical instrument with increased actuation force |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US10639108B2 (en) | 2015-10-30 | 2020-05-05 | Auris Health, Inc. | Process for percutaneous operations |
| CN105902315B (zh) * | 2016-06-03 | 2018-06-01 | 河南工业大学 | 一种新型微创手术机器人系统用微创手术工具 |
| KR102662094B1 (ko) | 2016-09-09 | 2024-05-03 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 리스트 구조 |
| JP7159192B2 (ja) | 2017-03-28 | 2022-10-24 | オーリス ヘルス インコーポレイテッド | シャフト作動ハンドル |
| US10285574B2 (en) | 2017-04-07 | 2019-05-14 | Auris Health, Inc. | Superelastic medical instrument |
| US10987174B2 (en) | 2017-04-07 | 2021-04-27 | Auris Health, Inc. | Patient introducer alignment |
| US11058503B2 (en) | 2017-05-11 | 2021-07-13 | Distalmotion Sa | Translational instrument interface for surgical robot and surgical robot systems comprising the same |
| CN107498568B (zh) * | 2017-10-16 | 2024-02-06 | 云南电网有限责任公司电力科学研究院 | 一种机械臂装置 |
| US10413374B2 (en) | 2018-02-07 | 2019-09-17 | Distalmotion Sa | Surgical robot systems comprising robotic telemanipulators and integrated laparoscopy |
| CN112218596A (zh) | 2018-06-07 | 2021-01-12 | 奥瑞斯健康公司 | 具有高力器械的机器人医疗系统 |
| WO2019239599A1 (ja) * | 2018-06-15 | 2019-12-19 | オリンパス株式会社 | 医療用処置具 |
| WO2020005854A1 (en) | 2018-06-28 | 2020-01-02 | Auris Health, Inc. | Medical systems incorporating pulley sharing |
| EP3806772A4 (en) | 2018-08-15 | 2022-03-30 | Auris Health, Inc. | MEDICAL INSTRUMENTS FOR TISSUE CAUTERIZATION |
| WO2020036686A1 (en) | 2018-08-17 | 2020-02-20 | Auris Health, Inc. | Bipolar medical instrument |
| WO2020068303A1 (en) | 2018-09-26 | 2020-04-02 | Auris Health, Inc. | Systems and instruments for suction and irrigation |
| WO2020076447A1 (en) | 2018-10-08 | 2020-04-16 | Auris Health, Inc. | Systems and instruments for tissue sealing |
| KR101932392B1 (ko) * | 2018-11-02 | 2018-12-24 | 한국과학기술원 | 관절 어셈블리 |
| US11950863B2 (en) | 2018-12-20 | 2024-04-09 | Auris Health, Inc | Shielding for wristed instruments |
| US11589913B2 (en) | 2019-01-25 | 2023-02-28 | Auris Health, Inc. | Vessel sealer with heating and cooling capabilities |
| US11534248B2 (en) | 2019-03-25 | 2022-12-27 | Auris Health, Inc. | Systems and methods for medical stapling |
| CN109946307B (zh) * | 2019-03-29 | 2023-10-20 | 北京城建五建设集团有限公司 | 一种可伸缩电动转向检查镜及其使用方法 |
| US11369386B2 (en) | 2019-06-27 | 2022-06-28 | Auris Health, Inc. | Systems and methods for a medical clip applier |
| US11109928B2 (en) | 2019-06-28 | 2021-09-07 | Auris Health, Inc. | Medical instruments including wrists with hybrid redirect surfaces |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| US10959792B1 (en) | 2019-09-26 | 2021-03-30 | Auris Health, Inc. | Systems and methods for collision detection and avoidance |
| WO2021064536A1 (en) | 2019-09-30 | 2021-04-08 | Auris Health, Inc. | Medical instrument with capstan |
| US11737835B2 (en) | 2019-10-29 | 2023-08-29 | Auris Health, Inc. | Braid-reinforced insulation sheath |
| WO2021137071A1 (en) | 2019-12-31 | 2021-07-08 | Auris Health, Inc. | Advanced basket drive mode |
| CN114901188A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 动态滑轮系统 |
| US11839969B2 (en) | 2020-06-29 | 2023-12-12 | Auris Health, Inc. | Systems and methods for detecting contact between a link and an external object |
| US11357586B2 (en) | 2020-06-30 | 2022-06-14 | Auris Health, Inc. | Systems and methods for saturated robotic movement |
| EP4171428A1 (en) | 2020-06-30 | 2023-05-03 | Auris Health, Inc. | Robotic medical system with collision proximity indicators |
| CN112826592B (zh) * | 2020-12-31 | 2023-04-25 | 武汉联影智融医疗科技有限公司 | 末端执行器、微创手术器械 |
| US11844585B1 (en) | 2023-02-10 | 2023-12-19 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006061364A (ja) * | 2004-08-26 | 2006-03-09 | Hitachi Ltd | 手術器具 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5828813A (en) * | 1995-09-07 | 1998-10-27 | California Institute Of Technology | Six axis force feedback input device |
| US6394998B1 (en) * | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| US7642895B2 (en) * | 1999-12-20 | 2010-01-05 | The Chamberlain Group, Inc. | Garage door operator having thumbprint identification system |
| US6902560B1 (en) * | 2000-07-27 | 2005-06-07 | Intuitive Surgical, Inc. | Roll-pitch-roll surgical tool |
| US8398634B2 (en) * | 2002-04-18 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Wristed robotic surgical tool for pluggable end-effectors |
| US6817974B2 (en) * | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| JP3912251B2 (ja) * | 2002-10-02 | 2007-05-09 | 株式会社日立製作所 | マニピュレータ |
| US7083615B2 (en) * | 2003-02-24 | 2006-08-01 | Intuitive Surgical Inc | Surgical tool having electrocautery energy supply conductor with inhibited current leakage |
| JP4460890B2 (ja) * | 2003-12-15 | 2010-05-12 | 衛 光石 | 多自由度マニピュレータ |
| JP4528136B2 (ja) * | 2005-01-11 | 2010-08-18 | 株式会社日立製作所 | 手術装置 |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US7568603B2 (en) * | 2006-01-31 | 2009-08-04 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with articulatable end effector |
| US20070208375A1 (en) * | 2006-02-23 | 2007-09-06 | Kouji Nishizawa | Surgical device |
| JP4829005B2 (ja) * | 2006-05-12 | 2011-11-30 | テルモ株式会社 | マニピュレータ |
| JP4654165B2 (ja) * | 2006-08-08 | 2011-03-16 | テルモ株式会社 | 作業機構及びマニピュレータ |
| JP2008114339A (ja) | 2006-11-06 | 2008-05-22 | Terumo Corp | マニピュレータ |
-
2008
- 2008-05-30 KR KR1020080051248A patent/KR101016102B1/ko active IP Right Grant
-
2009
- 2009-05-28 EP EP09755037.0A patent/EP2296563B1/en active Active
- 2009-05-28 CN CN200980120052.XA patent/CN102046101B/zh active Active
- 2009-05-28 WO PCT/KR2009/002833 patent/WO2009145572A2/en active Application Filing
- 2009-05-28 US US12/995,302 patent/US8801731B2/en active Active
- 2009-05-28 JP JP2011511511A patent/JP2011521703A/ja active Pending
-
2014
- 2014-06-04 JP JP2014115689A patent/JP6013399B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006061364A (ja) * | 2004-08-26 | 2006-03-09 | Hitachi Ltd | 手術器具 |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10631886B2 (en) | 2014-04-24 | 2020-04-28 | Livsmed Inc. | Surgical instrument |
| US12082836B2 (en) | 2014-04-24 | 2024-09-10 | Livsmed Inc. | Surgical instrument |
| US11246615B2 (en) | 2014-04-24 | 2022-02-15 | Livsmed Inc. | Surgical instrument |
| US11793538B2 (en) | 2014-10-02 | 2023-10-24 | Livsmed Inc. | Surgical instrument |
| US10709467B2 (en) | 2014-10-02 | 2020-07-14 | Livsmed Inc. | Surgical instrument |
| JP2017532127A (ja) * | 2014-10-02 | 2017-11-02 | リブスメド インコーポレーテッド | 手術用インストルメント |
| US10722315B2 (en) | 2015-02-17 | 2020-07-28 | Livsmed Inc. | Instrument for surgery |
| US11490980B2 (en) | 2015-02-17 | 2022-11-08 | Livsmed Inc. | Instrument for surgery |
| US11510746B2 (en) | 2015-02-17 | 2022-11-29 | Livsmed Inc. | Instrument for surgery |
| US11344381B2 (en) | 2015-02-17 | 2022-05-31 | Livsmed Inc. | Instrument for surgery |
| US11896336B2 (en) | 2015-02-17 | 2024-02-13 | Livsmed Inc. | Instrument for surgery |
| US11896337B2 (en) | 2015-02-17 | 2024-02-13 | Livsmed Inc. | Instrument for surgery |
| US11998295B2 (en) | 2015-02-17 | 2024-06-04 | Livsmed Inc. | Instrument for surgery |
| US11172999B2 (en) | 2017-11-14 | 2021-11-16 | Livsmed Inc. | Roll joint member for surgical instrument |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014230796A (ja) | 2014-12-11 |
| US8801731B2 (en) | 2014-08-12 |
| CN102046101B (zh) | 2014-03-19 |
| WO2009145572A3 (en) | 2010-03-04 |
| EP2296563A4 (en) | 2015-01-07 |
| EP2296563B1 (en) | 2017-08-16 |
| JP6013399B2 (ja) | 2016-10-25 |
| US20110106146A1 (en) | 2011-05-05 |
| WO2009145572A2 (en) | 2009-12-03 |
| EP2296563A2 (en) | 2011-03-23 |
| CN102046101A (zh) | 2011-05-04 |
| KR101016102B1 (ko) | 2011-02-17 |
| KR20090124828A (ko) | 2009-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6013399B2 (ja) | 最小侵襲手術用器具 | |
| JP5611946B2 (ja) | 最小侵襲手術用器具 | |
| JP6038453B2 (ja) | 最小侵襲手術用器具 | |
| US10856943B2 (en) | Surgical system and methods for mimicked motion | |
| JP5587318B2 (ja) | 最小侵襲手術用器具 | |
| KR101181569B1 (ko) | 단일 통로 수술 모드와 다통로 수술 모드를 실현할 수 있는 수술용 로봇 시스템 및 그 제어 방법 | |
| US9089352B2 (en) | Surgical robot system having tool for minimally invasive surgery | |
| CN106109017B (zh) | 机器人手术器械中的夹持力控制 | |
| KR101301783B1 (ko) | 최소 침습 수술 도구 | |
| KR20130026318A (ko) | 구형 부품을 포함하는 관절부를 갖는 최소 침습 수술 기구 | |
| KR101091412B1 (ko) | 최소 침습 수술 도구 | |
| EP2692302A2 (en) | Minimally invasive surgical instrument having shaft including internal torque-transmission member | |
| KR101126475B1 (ko) | 최소 침습 수술 도구 및 그 사용 방법 | |
| KR20110132302A (ko) | 최소 침습 수술 도구 및 그 사용 방법 | |
| KR20110014533A (ko) | 최소 침습 수술 도구 및 그 사용 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20101216 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120524 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20120724 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20120724 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130709 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131008 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140204 |