JP2011027595A - 地図データ検証システム - Google Patents
地図データ検証システム Download PDFInfo
- Publication number
- JP2011027595A JP2011027595A JP2009174637A JP2009174637A JP2011027595A JP 2011027595 A JP2011027595 A JP 2011027595A JP 2009174637 A JP2009174637 A JP 2009174637A JP 2009174637 A JP2009174637 A JP 2009174637A JP 2011027595 A JP2011027595 A JP 2011027595A
- Authority
- JP
- Japan
- Prior art keywords
- map data
- error
- vehicle
- distance
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Abstract
【課題】地図データと現実世界の地物の違いを短時間で検出可能な技術を提供する。
【解決手段】地図データ検証システムは、自車両(100)の位置を検出する位置検出手段と、道路および地物(301,302,303)のデータを格納した地図データと、道路の脇に存在する地物までの距離(101)を測定するレーザースキャナやステレオカメラなどの測距手段と、エラー箇所検出手段と、通信手段と備える。エラー箇所検出手段は、自車両位置と地図データとから測距手段によって測定される距離の予測値を求め、実際の測定距離と異なる箇所をエラー箇所であると判定する。自車両において検出されたエラー箇所は、通信手段によって周囲の車両(200)に通知される。
【選択図】図1
【解決手段】地図データ検証システムは、自車両(100)の位置を検出する位置検出手段と、道路および地物(301,302,303)のデータを格納した地図データと、道路の脇に存在する地物までの距離(101)を測定するレーザースキャナやステレオカメラなどの測距手段と、エラー箇所検出手段と、通信手段と備える。エラー箇所検出手段は、自車両位置と地図データとから測距手段によって測定される距離の予測値を求め、実際の測定距離と異なる箇所をエラー箇所であると判定する。自車両において検出されたエラー箇所は、通信手段によって周囲の車両(200)に通知される。
【選択図】図1
Description
本発明は、地図データが現実と一致するか否かを検証する技術に関する。
カーナビゲーション装置における地図データの高鮮度化を図るために、地図配信の仕組みなどが整備されている(特許文献1、2など)。ところで、地図データの鮮度を上げるためには、現地調査の頻度を上げなければならないが、更新頻度にも限界があり常に最新の地図データを配信することは困難である。
特許文献3には、自車位置の測定精度を向上させるために車載カメラ画像からランドマークを認識して補正に用いること、および、認識したランドマークが内蔵された地図データと異なる場合に、地図配信センターに地図データの更新情報を送ったり、地図配信センターから最新の地図データを取得したりすることが記載されている。特許文献3では、認識結果の確からしさや画像の撮影条件などを考慮した上で、内蔵された地図データが現実と異なる旨の報告を地図配信センターにしている。
カーナビゲーション装置の有する地図データが古くなり実際のデータと異なる場合には、できるだけ早期に、その箇所を検出できることが好ましい。本発明の目的は、地図データと現実世界の地物との違いを短時間で検出することにある。
上記目的を達成するために本発明では、地図データと現実世界の地物との違いの検出を、以下の手段または処理によって行う。
本発明に係る地図データ検証システムは、自車両の位置を検出する位置検出手段と、道路および地物のデータを格納した地図データと、道路の脇に存在する地物までの距離を測定する測距手段と、測距手段によって測定された距離が自車両位置および地図データから予測される値と異なる箇所(エラー箇所)を検出するエラー検出手段を有する。さらに、本発明に係る地図データ検証システムは、地図データのエラー箇所の情報をエラー情報として他の車両に送信するとともに、他の車両から送信されるエラー情報を受信する通信手段とを有する。
測距手段としては、レーザースキャナや、ステレオカメラを用いることができる。レーザースキャナは、計測対象物とセンサーとの間をレーザーパルスが往復する時間を計測することで、計測対象物までの距離を測定する。レーザースキャナは、たとえば、車両の斜め前方向き(左前方および右前方)に固定すれば、車両の移動とともに道路脇に存在する物体までの距離を計測できる。レーザースキャナは垂直方向に所定の周波数(たとえば数十〜数百ヘルツ)で走査するが、垂直方向に走査しなくても良い。ステレオカメラは、2つのカメラから撮影される画像の視差に基づいて計測対象物までの距離を測定する。ステ
レオカメラの場合は、1回の撮影で、撮影対象物の全てについての距離が測定可能である。
レオカメラの場合は、1回の撮影で、撮影対象物の全てについての距離が測定可能である。
地図データは、3次元地図データであることが好ましい。すなわち、道路や地物の3次元形状が格納されていることが好ましい。ただし、2次元地図データであっても、道路の情報以外に、地物の平面形状や、地物と道路との間の距離が含まれていれば本発明において利用可能である。すなわち、道路上の任意の点とその地物との間の距離が算出可能なデータが含まれていれば良い。なお、地物とは地上に存在する物体のうち、移動体を除き、地表において位置が固定されている非移動体を意味する。地物は人工物であっても自然物であっても良く、人工物にはたとえば、建築物、各種施設、橋、鉄道などが含まれ、自然物にはたとえば、山、海、河川などが含まれる。
自車両の位置は位置検出手段によって検出できる。位置検出手段は、典型的にはGPS装置であるが、加速度センサーやジャイロセンサーを利用して自車両の位置情報を補完的に求めても良い。また、位置検出には、GPS以外の無線通信、道路に埋め込まれたマーカー(磁気マーカー、画像マーカーなど)などを用いても良い。また、自車両の位置の履歴から走行方向も検出可能である。
自車両の位置および走行方向が分かると、測距手段による測定方向に位置する地物までの距離を地図データから算出可能である。地図データから算出される地物までの距離と、実際に測距手段によって測定される地物までの距離が異なる場合は、地図データが現実と異なることが分かる。具体的には、地図データによると道路の脇近くに地物があるにもかかわらず、測距手段による測定距離が予測値よりも大きい場合には、地図データには存在するとされている地物が消滅したと判断できる。一方、地図データには道路の脇近くには地物が無く、したがって、より遠くの地物までの距離が測定される判断されるにもかかわらず、測距手段による測定距離が短い場合には、その位置に新たに地物が生成されたと判断できる。このように、エラー検出手段は、地図データにエラーのある箇所(エラー箇所と呼ぶ)を検出可能である。
なお、測距手段による地物までの距離の測定は、ある程度の測定期間(たとえば車両が数メートル進む間の時間)の、平均測定距離を採用しても良い。一点のみによる測定では誤差の影響があったり、障害物までの距離を測定することもあり得るからである。また、測距手段としてレーザースキャナを用いて垂直方向にも走査する場合、走査周波数に比較して車両の速度が遅ければ地物の3次元形状を測定可能である。地図データも3次元である場合には、地図データ中の地物の形状と測定結果を比較して同一の地物であるか否かを判断して、地図データにエラーがあるが判断しても良い。
エラー検出手段によって検出されたエラー箇所の情報は、通信手段によって周囲の車両にエラー情報として送信される。このような通信手段(車車間通信手段)には、無線LANやDSRC(専用狭域通信)などの無線通信や、可視光通信や赤外光通信などの光通信を採用できる。このように車車間通信によってエラー箇所の情報を車両間で共有するため、各車両は、自車両で測定して検出できるエラー箇所だけでなく、他の車両が検出したエラー箇所の情報も取得できる。すなわち、多くのエラー箇所を短時間に収集することができる。これにより、地図データが現実と異なる箇所を短時間で検出可能である。
測距手段として、レーザースキャナやステレオカメラを利用することができる。レーザースキャナは照明による影響はあまり受けないが、降雨時には雨滴による影響を受け測定性能が低下する。したがって、降雨時にはレーザースキャナによる測定を行わないか、または、降雨時の測定であることをエラー情報に加えることが好ましい。雨が降っているか否かは、たとえば、ワイパーが動作しているか否かによって判断しても良いし、天気に関
する情報を無線通信などによって取得して判断しても良い。また、測距手段としてステレオカメラを利用する場合は、日中の測定性能は良好であるが、それ以外(夜間等)は測定性能が低下する。したがって、日中以外にはステレオカメラによる測定を行わないか、または、日中以外の測定であることをエラー情報に加えることが好ましい。ここで、日中として、たとえば、日出および日没時刻を基準として、日出1時間後から日没1時間前の間として定義することができる。
する情報を無線通信などによって取得して判断しても良い。また、測距手段としてステレオカメラを利用する場合は、日中の測定性能は良好であるが、それ以外(夜間等)は測定性能が低下する。したがって、日中以外にはステレオカメラによる測定を行わないか、または、日中以外の測定であることをエラー情報に加えることが好ましい。ここで、日中として、たとえば、日出および日没時刻を基準として、日出1時間後から日没1時間前の間として定義することができる。
本発明において、自車両が検出した地図データのエラー箇所や、他の車両から送信される地図データのエラー箇所の情報を、エラー判定の信頼度とともに記憶する記憶手段をさらに備えることが好ましい。ここで、エラー判定の信頼度とは、地図データの情報と実際の測定とが異なるという判断が信頼できる確かさをいう。たとえば、測距手段による測定精度を信頼度として利用することができる。上述のように、測距手段がレーザースキャナの場合は、晴天時の測定に基づくエラー判定の方が、降雨時の測定に基づくエラー判定よりも信頼度が高い。測距手段がステレオカメラの場合に、日中の測定に基づくエラー判定の方が、夜間(日中以外)の測定に基づくエラー判定よりも信頼度が高い。
また、多くの車両によってエラー判定されている箇所は、そのエラー判定の信頼度を高いものと判断できる。したがって、多くの車両からエラー情報として送信されるエラー箇所についてのエラー判定の信頼度は高いものと判断できる。
また、同一の箇所について、異なる方向に走行する車両からエラーであると判定された箇所は、そのエラー判定の信頼度を高いものと判断できる。そのために、エラー情報を他の車両に送信する際に、このエラー箇所の距離測定を行ったときの自車両の走行方向をあわせて送信することが好ましい。
また、エラー箇所の距離測定を行ったときの、エラー箇所と自車両との距離が短いほど、距離測定の精度が高く、したがってエラー判定の信頼度が高いと判断できる。そのために、エラー情報を他の車両に送信する際に、このエラー箇所の距離測定を行った際のエラー箇所と自車両との間の距離をあわせて送信することが好ましい。
なお、本発明は、上記手段の少なくとも一部を有する地図データ検証システムとして捉えることができる。また、本発明は、上記処理の少なくとも一部を含む地図データ検証方法、または、かかる方法を実現するためのプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
本発明によれば、地図データと現実世界の地物との違いを短時間で検出できる。
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。なお、以下では地物が建築物である例を用いて説明を行うが、地物は建築物以外のものであっても構わない。
(概要)
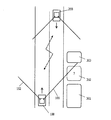
図1は本実施形態に係る地図データ検証システムの概略を説明する図である。図中上方向に走行する車両100は、符号101,102の示す方向を対象にレーザースキャナによる距離測定を行いながら走行する。距離測定を行う方向は、車両の斜め前方であり、道路脇に存在する建築物までの距離を測定可能である。車両100は、ナビゲーション用に地図データを有している。この地図データには道路のデータ以外に、建築物のデータも含まれる。したがって、自車両の位置が分かると、測定方向101,102に存在する建築物までの距離が地図データから予測可能である。地図データから予測される距離と、レーザースキャナによる実際の測定距離とが異なる場合は、地図データが現実と異なることが分かる。たとえば、地図データには建築物301,302,303が存在しているが、実際には建築物302が取り壊されている状況を考える。図に示すように車両100の測定方向101が建築物302の方向と一致する場合、測定方向101についての実際の測定距離は建築物303までの距離となり、地図データから予測される距離よりも長いため、建築物302が消滅したことが分かる。つまり、車両100は地図データに含まれる建築物302が消滅したことが分かる。逆に、地図データには建築物が存在しない場所に新たに建築物ができた場合も、レーザースキャナによる測定距離が地図データから予測される距離と異なるため、建築物の生成を把握可能である。車両100は、このように地図データが現実を反映していない箇所(エラー箇所)を検出すると、エラー箇所の情報を他の車両200に車車間通信によって通知する。この情報を受け取った車両200では、地図データが誤っている旨の表示を行ったりすることができる。
図1は本実施形態に係る地図データ検証システムの概略を説明する図である。図中上方向に走行する車両100は、符号101,102の示す方向を対象にレーザースキャナによる距離測定を行いながら走行する。距離測定を行う方向は、車両の斜め前方であり、道路脇に存在する建築物までの距離を測定可能である。車両100は、ナビゲーション用に地図データを有している。この地図データには道路のデータ以外に、建築物のデータも含まれる。したがって、自車両の位置が分かると、測定方向101,102に存在する建築物までの距離が地図データから予測可能である。地図データから予測される距離と、レーザースキャナによる実際の測定距離とが異なる場合は、地図データが現実と異なることが分かる。たとえば、地図データには建築物301,302,303が存在しているが、実際には建築物302が取り壊されている状況を考える。図に示すように車両100の測定方向101が建築物302の方向と一致する場合、測定方向101についての実際の測定距離は建築物303までの距離となり、地図データから予測される距離よりも長いため、建築物302が消滅したことが分かる。つまり、車両100は地図データに含まれる建築物302が消滅したことが分かる。逆に、地図データには建築物が存在しない場所に新たに建築物ができた場合も、レーザースキャナによる測定距離が地図データから予測される距離と異なるため、建築物の生成を把握可能である。車両100は、このように地図データが現実を反映していない箇所(エラー箇所)を検出すると、エラー箇所の情報を他の車両200に車車間通信によって通知する。この情報を受け取った車両200では、地図データが誤っている旨の表示を行ったりすることができる。
(機能構成)
図2は、本実施形態における車載装置の機能構成を示す図である。レーザースキャナ1は、レーザーパルスを照射し、その反射パルスが帰ってくるまでの時間を計測することで、計測対象物までの距離を計測する。本実施形態では、レーザースキャナ1を利用して、自車両と道路の脇に存在している建築物までの距離を計測する。レーザースキャナ1は車両に2つ搭載され、それぞれ左斜め前方および右斜め前方に向けられている。測定方向の水平面内方向は固定されているが、垂直方向には所定の角度範囲で走査する。たとえば、0度(水平)から70度の範囲を走査周波数100Hzで走査する。もちろん、走査角度の範囲や走査周波数は適宜設定可能である。走査角度の範囲を大きくするほど、より高い位置に存在する建築物までの距離を測定可能である。また、走査周波数が高いほど分解能の高い測定が可能であり、建築物の詳細な3次元形状を取得可能である。計測対象物の距離と車両の移動速度によっても変化するが、距離10m、時速50km、走査周波数100Hzであれば10〜20cm程度の間隔で計測できる。
図2は、本実施形態における車載装置の機能構成を示す図である。レーザースキャナ1は、レーザーパルスを照射し、その反射パルスが帰ってくるまでの時間を計測することで、計測対象物までの距離を計測する。本実施形態では、レーザースキャナ1を利用して、自車両と道路の脇に存在している建築物までの距離を計測する。レーザースキャナ1は車両に2つ搭載され、それぞれ左斜め前方および右斜め前方に向けられている。測定方向の水平面内方向は固定されているが、垂直方向には所定の角度範囲で走査する。たとえば、0度(水平)から70度の範囲を走査周波数100Hzで走査する。もちろん、走査角度の範囲や走査周波数は適宜設定可能である。走査角度の範囲を大きくするほど、より高い位置に存在する建築物までの距離を測定可能である。また、走査周波数が高いほど分解能の高い測定が可能であり、建築物の詳細な3次元形状を取得可能である。計測対象物の距離と車両の移動速度によっても変化するが、距離10m、時速50km、走査周波数100Hzであれば10〜20cm程度の間隔で計測できる。
なお、レーザースキャナ1の設置条件は上記のものに限定されない。たとえば、レーザースキャナの測定方向は斜め前方に限定されず、横方向や斜め後方であっても構わない。また、レーザースキャナの数は2つである必要はなく、3つ以上利用しても良く、また1つのみのレーザースキャナで走査角度範囲を大きく(たとえば、180度以上)することで、道路の両側の建築物までの距離を計測できる。また、建築物の3次元形状を計測せずに車両と建築物との間の距離を測定するのであれば、走査を行わない測距センサーを用いても構わない。測距センサーとしてレーザー式以外にも赤外光や超音波などを用いて構わない。
測距手段としてステレオカメラを用いても良い。ステレオカメラは、2つのカメラによって1対の画像を撮影し、視差に基づいて撮影対象物までの距離を算出する。ステレオカメラは毎秒数十〜百フレーム程度のフレーム速度で画像取得を行う。ステレオカメラを用いる場合もレーザースキャナと同様に、左斜め前方と右斜め前方を向いた2組のステレオカメラを用いることが好ましいが、これに限られるものではない。また、ステレオカメラ
の撮像素子(CCDやCMOSなど)は、夜間にも撮影可能なように、可視光領域だけでなく近赤外領域まで検出可能な撮像素子を用いても良い。
の撮像素子(CCDやCMOSなど)は、夜間にも撮影可能なように、可視光領域だけでなく近赤外領域まで検出可能な撮像素子を用いても良い。
自車位置検出部2は、GPS装置3、ジャイロセンサー4、加速度センサー5などを利用して自車両の位置および走行方向を検出する。GPS装置3が受信するGPS衛星信号に基づいて自車両の絶対座標を取得するとともに、ジャイロセンサー4から得られる走行方向や加速度センサー5から得られる移動距離に基づいて補正を行うことで自車両の位置を精度良く検出できる。その他、地図データとのマッチング(マップマッチング)により位置補正を行っても良い。なお、自車両の位置検出は上記の構成によるものに限られず、無線通信による位置情報の取得、道路に埋め込まれた磁気マーカーの検知、カメラ画像の画像認識などの手段を併用して自車両の位置を検出しても良い。
3次元地図データ6は、道路やその周辺の構造物の3次元形状を記憶する。エラー箇所検出部7は、3次元地図データ6が現実と異なる箇所を検出する。自車位置検出部2から得られる自車両の位置および走行方向と3次元地図データ6とから、現在の車両位置からレーザースキャナの測定方向にある建築物までの距離が算出できる。すなわち、地図データが正しい場合のレーザースキャナによる測定の予測値が算出できる。そこで、エラー箇所検出部7は、レーザースキャナ1による実測値と、自車両位置と地図データとから算出される予測値を比較して、これらが一致するか否かを判断することで、地図データが正しいか否か判定する。
距離測定の結果に基づいて地図データの正しさを判定する処理について、図3を参照してより詳細に説明する。図3は3次元地図データ6に含まれる地図の例を示す。たとえば、図3(a)に示すように、3次元地図データ6上では交差点付近に建築物51,52,53が存在している場合を考える。図中の車両Aのエラー箇所検出部7は、自車両の位置・走行方向および地図データに基づいて、左前方向きのレーザースキャナ1による測定の結果が距離61になるものと判断(予測)できる。車両Bも同様に、左前方向きのレーザースキャナ1による測定の結果は距離62になるものと判断できる。地図データが現実と一致する場合には、レーザースキャナによる実際の計測結果は、地図データから予測される距離61,62と等しくなる。
しかしながら、図3(b)に示すように、建築物51が消滅している場合は、車両A,Bからは本来見えないはずの建築物53、52との間の距離63、64が計測される。このように、3次元地図データ6に基づいて予測される測定値よりも、実際の測定結果の方が大きい場合は、建築物が消滅したと判断できる。
逆に、3次元地図データ6には建築物51が存在しないと記録されている場合は、車両A,Bはそれぞれ図3(b)の距離63,64が測定されると予測されるが、実際の計測結果としては距離61,62が得られる。このように、3次元地図データ6に基づいて予測される測定値よりも、実際の測定結果の方が小さい場合は、建築物が生成したと判断できる。
エラー箇所検出部7は以上のようにして、地図データに記録されているデータが現実と異なる箇所(エラー箇所)を検出する。
しかしながら、図3(b)に示すように、建築物51が消滅している場合は、車両A,Bからは本来見えないはずの建築物53、52との間の距離63、64が計測される。このように、3次元地図データ6に基づいて予測される測定値よりも、実際の測定結果の方が大きい場合は、建築物が消滅したと判断できる。
逆に、3次元地図データ6には建築物51が存在しないと記録されている場合は、車両A,Bはそれぞれ図3(b)の距離63,64が測定されると予測されるが、実際の計測結果としては距離61,62が得られる。このように、3次元地図データ6に基づいて予測される測定値よりも、実際の測定結果の方が小さい場合は、建築物が生成したと判断できる。
エラー箇所検出部7は以上のようにして、地図データに記録されているデータが現実と異なる箇所(エラー箇所)を検出する。
なお、レーザースキャナ1の測定方向に、他の車両や人物など地図データには含まれず一時的に現れる物体が存在する場合には、この物体までの距離が計測される。このような測定距離に基づく地図データの検証は誤検出につながるので、レーザースキャナによる計測結果が、自車両と道路脇(歩道も含む)との距離よりも小さい場合は、その測定結果を地図の検証に用いないことが好ましい。すなわち、レーザースキャナ1の測定方向について建築物が存在可能な領域までの最短距離を地図データから算出し、実際の測定結果が算出した最短距離よりも短い場合は、その計測を無効とする(エラー判定に利用しない)ことが好ましい。このようにすれば、一時的に存在する物体の影響を受けずに、地図データ
の検証を行える。
の検証を行える。
エラー箇所を判定する際に、車両と対象物との距離以外の情報を用いても良い。たとえば、建築物の高さが一致するか否かを判定に利用しても良い。レーザースキャナによって垂直方向に走査している場合は建築物の高さを判断可能である。地図データに記録されている建築物の高さと、実際の測定による高さが異なる場合には、その位置に別の建築物が建てられたと判断することができる。また、レーザースキャナ1が分解能高く測定できる場合には、測定結果として得られる建築物の3次元形状が、地図データに含まれる建築物の3次元形状と一致するか否かによって、地図データが正しいか判断できる。
なお、ここでは地図データとして3次元地図データ6を利用することを想定しているが、建築物の3次元形状のマッチングによる地図データの検証を行わない場合は、2次元地図データを利用しても構わない。この場合、2次元地図データに、建築物の平面形状または道路脇からの距離などが含まれていれば、道路上の任意の点からその建築物までの距離を算出できるので、上記の判定が実行可能である。また、建築物の属性データとして高さが含まれていれば、高さを利用する判定も実行可能である。
エラー箇所検出部7によって、現実と異なると判定された箇所に関する情報(エラー情報)は、エラー情報蓄積部8に蓄積される。なお、後述するように、エラー情報は他の車両に送信されるので、他の車両に通知すべき情報を格納しておくべきである。エラー情報蓄積部8には、自車が検出したエラー情報だけでなく、他の車両から通知されるエラー情報も格納する。
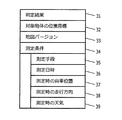
図4は、エラー情報に含まれる属性情報を示す。判定結果31には、どのようなエラーが発生しているのか、すなわち、対象物体の消滅、物体の生成、対象物体の変化のいずれであるかを示す情報を格納する。また、対象物体の位置座標32には、エラー箇所の位置を表す情報を格納する。エラー箇所の位置は、位置座標として格納されても良いし、地図データにおいて建築物に識別子が割り当てられている場合はその識別子を利用しても良い。また、エラー検出を行った地図のバージョン33も含ませる。後述するようにエラー情報は他の車両に通知されるため、どのバージョンの地図データについてエラー情報であるのかが重要となる。エラー情報には、さらに、エラー検出を行った際の測定条件34が含まれる。
測定条件34としては、たとえば、測定手段35、測定日時36、測定時の自車両の位置37、測定時の走行方向38、測定時の天気39などを含めることができる。車両によって距離測定の手段が異なることが考えられるため、どのような種類の測定機器(たとえば、レーザースキャナ、赤外線測距センサー、ステレオカメラなど)を利用したか、また、その測定性能を測定手段35に格納する。測定日時36は、どの時点でエラーであると判定されたかを把握するために用いられる。また、測定日時36は、測定手段の測定精度が時間帯によって異なる場合には、エラー判定の信頼度に関係する。測定時の自車両の位置37は、どの地点からの測定であるか、あるいは対象物との距離を判別するために用いられる。対象物との距離が近い位置からの測定ほど測定精度が良く、したがってエラー判定の信頼度も高いものと判断できる。測定時の走行方向38を利用するのは、特定の方向に走行している場合だけでなく、異なる方向に走行している場合に同じエラーが検出できれば、エラー検出の信頼度が高いと判断できるためである。測定時の天気39を用いるのは、天候によって測定精度が変わる場合に、エラー判定の信頼度に影響を与えるからである。たとえば、レーザースキャナは降雨時には測定精度が落ちるので、天気39として少なくとも雨が降っていたか否かを含めることが好ましい。
測定条件34としては、たとえば、測定手段35、測定日時36、測定時の自車両の位置37、測定時の走行方向38、測定時の天気39などを含めることができる。車両によって距離測定の手段が異なることが考えられるため、どのような種類の測定機器(たとえば、レーザースキャナ、赤外線測距センサー、ステレオカメラなど)を利用したか、また、その測定性能を測定手段35に格納する。測定日時36は、どの時点でエラーであると判定されたかを把握するために用いられる。また、測定日時36は、測定手段の測定精度が時間帯によって異なる場合には、エラー判定の信頼度に関係する。測定時の自車両の位置37は、どの地点からの測定であるか、あるいは対象物との距離を判別するために用いられる。対象物との距離が近い位置からの測定ほど測定精度が良く、したがってエラー判定の信頼度も高いものと判断できる。測定時の走行方向38を利用するのは、特定の方向に走行している場合だけでなく、異なる方向に走行している場合に同じエラーが検出できれば、エラー検出の信頼度が高いと判断できるためである。測定時の天気39を用いるのは、天候によって測定精度が変わる場合に、エラー判定の信頼度に影響を与えるからである。たとえば、レーザースキャナは降雨時には測定精度が落ちるので、天気39として少なくとも雨が降っていたか否かを含めることが好ましい。
このようにエラー情報に含まれる測定条件などの情報から、個々のエラー検出の確かしさ(信頼度)を判定することができる。したがって、エラー情報蓄積部8に蓄積されるエ
ラー情報に、測定条件などの属性情報だけでなく、信頼度を付与して記憶しても良い。個々のエラー検出については、距離の測定精度が高いほどエラー検出の信頼度も高いと判断できる。したがって、測定日時や測定時の天気などの情報や、測定対象物との距離などに基づいて、エラー検出の信頼度を算出することができる。
ラー情報に、測定条件などの属性情報だけでなく、信頼度を付与して記憶しても良い。個々のエラー検出については、距離の測定精度が高いほどエラー検出の信頼度も高いと判断できる。したがって、測定日時や測定時の天気などの情報や、測定対象物との距離などに基づいて、エラー検出の信頼度を算出することができる。
車車間通信部9は、自車両が検出したエラーを他の車両に通知するために用いられる。車車間通信部9は、無線通信や光通信(可視光通信、赤外光通信)など任意の通信媒体を用いることができ、また通信方式も特に限定されない。車車間通信部9によってエラー情報を送信する場合は、相手車両にとって必要性の高いエラー箇所の情報を送信するべきである。相手車両にとって必要性の高いエラー箇所としては、通信時の自車両(および相手車両)の位置近傍のエラー箇所が挙げられる。また、対向車両にエラー情報を送信する場合は、自車両後方、すなわち、相手車両がこれから走行する箇所についてのエラー情報もそのような情報として挙げられる。
(処理フロー)
次に、図5を参照して地図データのエラー検出処理について説明する。まず、車両が走行しているか否か判定する(S102)。車両が停止している場合(S102−NO)は何も処理を行わず終了する。車両が走行している場合(S102−YES)は、自車位置検出部2によって自車両の位置を推定する(S104)。また、レーザースキャナ1による距離計測を行う(S106)。エラー箇所検出部7は、自車両の位置と、3次元地図データ6に含まれる周囲の情報とから、レーザースキャナ1による測定方向に存在する地物までの距離、すなわち、レーザースキャナ1による計測結果の予測値を算出する(S108)。そして、レーザースキャナによる計測結果と、地図データからの予測値との差が閾値以上であるか判定する(S110)。閾値は、レーザースキャナ1の測定誤差よりも大きい値である。
次に、図5を参照して地図データのエラー検出処理について説明する。まず、車両が走行しているか否か判定する(S102)。車両が停止している場合(S102−NO)は何も処理を行わず終了する。車両が走行している場合(S102−YES)は、自車位置検出部2によって自車両の位置を推定する(S104)。また、レーザースキャナ1による距離計測を行う(S106)。エラー箇所検出部7は、自車両の位置と、3次元地図データ6に含まれる周囲の情報とから、レーザースキャナ1による測定方向に存在する地物までの距離、すなわち、レーザースキャナ1による計測結果の予測値を算出する(S108)。そして、レーザースキャナによる計測結果と、地図データからの予測値との差が閾値以上であるか判定する(S110)。閾値は、レーザースキャナ1の測定誤差よりも大きい値である。
測定結果と予測値の差が閾値よりも大きい場合(S110−YES)は、地図データが誤りであるので、エラー情報をエラー情報蓄積部8に記憶する。エラー情報の属性のうち判定結果31は、測定結果と予測値の大小によって判断可能であり、測定結果が予測値よりも小さい場合は建築物の生成であると判断でき、測定結果が予測値よりも大きい場合は建築物の消滅であると判断できる。対象物体の位置座標32は、建築物の消滅である場合にはその建築物の識別子を利用することが簡便である。もちろん、この位置座標32に絶対座標を用いても良い。測定時の日時36,自車位置37、走行方向38は内蔵クロックや自車位置検出部2から得られる。測定時の天気39は、無線通信によって外部から取得しても良いが、雨が降っているか否かを記録するだけであればワイパーの動作の有無によって判断することが簡便である。
また、周囲に車両が存在するかを車車間通信部9によって判定し(S116)、周囲に車両が存在する場合(S116−YES)には、周辺のエラー情報を送信する(S118)。ステップS104からS116までの処理は、車両が走行停止するまで(S118−NO)まで継続的に実行される。
(エラー情報受信時の処理)
次に、周囲の車両からエラー情報を受信した車両の動作について説明する。第一に考慮すべき事項は、エラー情報に含まれる地図バージョンである。すなわち、エラー情報がどのバージョンの地図データのエラーを報告するものであるか判断すべきである。自車両が有するものとは異なるバージョンの地図データに関するエラー情報であれば、自車両が有する地図データには適用できない情報である可能性もあるため無視することが安全である。ただし、地図データのバージョンが異なる場合であっても、報告されているエラーが発生している箇所のデータが、両バージョンで同じであると何らかの手段で分かる場合には
、このエラー情報は利用可能である。以下は、自車両でも利用可能なエラー情報を受け取った場合のみについて述べる。
次に、周囲の車両からエラー情報を受信した車両の動作について説明する。第一に考慮すべき事項は、エラー情報に含まれる地図バージョンである。すなわち、エラー情報がどのバージョンの地図データのエラーを報告するものであるか判断すべきである。自車両が有するものとは異なるバージョンの地図データに関するエラー情報であれば、自車両が有する地図データには適用できない情報である可能性もあるため無視することが安全である。ただし、地図データのバージョンが異なる場合であっても、報告されているエラーが発生している箇所のデータが、両バージョンで同じであると何らかの手段で分かる場合には
、このエラー情報は利用可能である。以下は、自車両でも利用可能なエラー情報を受け取った場合のみについて述べる。
エラー情報は次のように利用することが考えられる。まず、カーナビゲーション装置が地図をディスプレイに表示する際に、エラーが発生している箇所を、通常の表示色と変えて表示することで、他の箇所と区別可能に表示することが考えられる。また、他の車両から報告されたエラー箇所を自車両でも測定することが考えられる。複数の車両によって同じ箇所がエラーであると判定された場合は、そのエラー判定の信頼性が向上する。また、エラー情報に基づいて自車両の地図データを更新しても良い。
また、他の車両から受信したエラー情報を、自車両が検出したエラー情報とともに蓄積しても良い。あるエリアでのエラー箇所の数が所定の閾値よりも大きくなったときに、ユーザーに対して地図データの更新を促すようにしても良い。また、地図を表示する際に、エラー箇所が分かるように表示しても良い。縮尺の小さな地図を表示する場合には、エリア内のエラー箇所の数に応じた色を付けて地図を表示することが好ましい。地図データが古い場合は、広い範囲にわたってエラー箇所が分布していることをユーザーは一目で見て取れる。したがって、このようにすればユーザーは自車両が有する地図データが古くなったことを容易に知ることができる。
また、他車両から取得したエラー情報について、その判定が信頼できるか否かを判定することが好ましい。エラー情報には、図4に示されるような属性情報が含まれるため、これらの情報に基づいて信頼度を判定することができる。たとえば、測定手段と測定条件の関係によって信頼度を判定できる。測定手段がレーザースキャナであれば降雨時の測定誤差が大きくなる場合もあるので、降雨時のエラー判定は信頼度が低いと判断できる。また、測定手段がステレオカメラなどによる場合は、測定精度が照明の影響を受けるので、夜間や降雨時のエラー判定は信頼度が低いと判断できる。また、車両と測定対象物との間の距離が近いほど測定精度も高いので、対象物体の位置と測定時の位置とに基づいてエラー判定の信頼度を判断しても良い。
他の車両から送信されるエラー情報を蓄積していくと、同一の地点についてのエラー情報が複数蓄積される。そこで、個々のエラー情報だけに着目してエラー判定の信頼度を算出するだけでなく、蓄積した複数のエラー情報に基づいてエラー判定の信頼度を算出しても良い。最も簡単には、同一内容のエラー情報が数多く蓄積されている箇所は、実際にエラーが起きている可能性が高いと判断できる。また、異なる方向に走行中の車両がエラーであると判定している箇所は、実際にエラーが起きている可能性が高い。また、異なる測定手段を有する車両がともにエラーであると判定している箇所も、実際にエラーが起きている可能性が高い。このように、複数のエラー情報を蓄積することで、報告されるエラーの信頼度を評価することもできる。
(本実施形態の作用・効果)
車載の測距手段を用いて地図データのエラー情報を、周囲の車両に通知するので、タイムラグの短い通知が可能である。特にインフラの整備や地図データの整備が遅れがちな、生活道路(いわゆる細街路等)の地物の情報共有に有効である。また、センターへ通信しないので、通信コストが低コストで済む。
車載の測距手段を用いて地図データのエラー情報を、周囲の車両に通知するので、タイムラグの短い通知が可能である。特にインフラの整備や地図データの整備が遅れがちな、生活道路(いわゆる細街路等)の地物の情報共有に有効である。また、センターへ通信しないので、通信コストが低コストで済む。
さらに、本発明では、レーザースキャナなどによる距離測定を利用しているため、カメラ画像の画像認識を行う従来手法と比較して高速に処理が可能という利点がある。さらに、エラーを他の車両に通知する際に、画像情報などを送信するのではなく、消滅・生成した地物の位置などの情報のみを通信するため、通信データ容量の限られる車車間通信にも適用可能である。
1 レーザースキャナ
2 自車位置検出部
7 エラー箇所検出部
8 エラー情報蓄積部
9 車車間通信部
2 自車位置検出部
7 エラー箇所検出部
8 エラー情報蓄積部
9 車車間通信部
Claims (7)
- 自車両の位置を検出する位置検出手段と、
道路および地物のデータを格納した地図データと、
道路の脇に存在する地物までの距離を測定する測距手段と、
前記測距手段によって測定された距離が、自車両位置および地図データから予測される値と異なるエラー箇所を検出するエラー検出手段と、
前記地図データのエラー箇所の情報をエラー情報として他の車両に送信するとともに、他の車両から送信されるエラー情報を受信する通信手段と、
を有することを特徴とする地図データ検証システム。 - 前記測距手段はレーザースキャナであることを特徴とする請求項1に記載の地図データ検証システム。
- 前記測距手段はステレオカメラであることを特徴とする請求項1に記載の地図データ検証システム。
- 自車両が検出した地図データのエラー箇所および、他の車両から送信される地図データのエラー箇所の情報を、エラー判定の信頼度とともに記憶する記憶手段をさらに有する
ことを特徴とする請求項1〜3のいずれか1項に記載の地図データ検証システム。 - 多くの車両から送信されるエラー箇所ほど、前記信頼度を大きくすることを特徴とする請求項4に記載の地図データ検証システム。
- 前記エラー情報を他の車両に送信する際には、当該エラー箇所の距離測定を行ったときの自車両の走行方向をあわせて送信し、
一つのエラー箇所について、異なる方向への走行中の距離測定によって地図データと実際の測定が異なると判定された場合に、当該エラー箇所の前記信頼度をより大きくする
ことを特徴とする請求項4または5に記載の地図データ検証システム。 - 前記エラー情報を他の車両に送信する際には、当該エラー箇所と自車両との間の距離をあわせて送信し、
エラー箇所と自車両との距離が短いほど、エラー箇所の前記信頼度をより大きくする
ことを特徴とする請求項4〜6のいずれか1項に記載の地図データ検証システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009174637A JP2011027595A (ja) | 2009-07-27 | 2009-07-27 | 地図データ検証システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009174637A JP2011027595A (ja) | 2009-07-27 | 2009-07-27 | 地図データ検証システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011027595A true JP2011027595A (ja) | 2011-02-10 |
Family
ID=43636509
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009174637A Withdrawn JP2011027595A (ja) | 2009-07-27 | 2009-07-27 | 地図データ検証システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011027595A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150066182A (ko) * | 2013-12-06 | 2015-06-16 | 한국전자통신연구원 | 정밀 위치 설정 장치 및 방법 |
| WO2018181974A1 (ja) * | 2017-03-30 | 2018-10-04 | パイオニア株式会社 | 判定装置、判定方法、及び、プログラム |
| WO2018212301A1 (ja) * | 2017-05-19 | 2018-11-22 | パイオニア株式会社 | 自己位置推定装置、制御方法、プログラム及び記憶媒体 |
| JP2018194346A (ja) * | 2017-05-15 | 2018-12-06 | 日本電気株式会社 | 画像処理装置、画像処理方法及び画像処理プログラム |
| WO2019188886A1 (ja) * | 2018-03-30 | 2019-10-03 | パイオニア株式会社 | 端末装置、情報処理方法、プログラム、及び、記憶媒体 |
| JP2019197356A (ja) * | 2018-05-09 | 2019-11-14 | トヨタ自動車株式会社 | 自動運転システム |
| JP2019215875A (ja) * | 2019-07-03 | 2019-12-19 | 三菱電機株式会社 | 情報処理装置 |
| KR20210042213A (ko) * | 2019-10-08 | 2021-04-19 | 주식회사 엠큐닉 | 정밀도로지도 품질평가 점수 생성 및 배포 시스템 |
| US11868135B2 (en) | 2020-07-06 | 2024-01-09 | Honda Motor Co., Ltd. | Processing device, processing method, and medium for evaluating map reliability for vehicles |
-
2009
- 2009-07-27 JP JP2009174637A patent/JP2011027595A/ja not_active Withdrawn
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150066182A (ko) * | 2013-12-06 | 2015-06-16 | 한국전자통신연구원 | 정밀 위치 설정 장치 및 방법 |
| KR102003339B1 (ko) * | 2013-12-06 | 2019-07-25 | 한국전자통신연구원 | 정밀 위치 설정 장치 및 방법 |
| WO2018181974A1 (ja) * | 2017-03-30 | 2018-10-04 | パイオニア株式会社 | 判定装置、判定方法、及び、プログラム |
| US11378406B2 (en) | 2017-03-30 | 2022-07-05 | Pioneer Corporation | Determination device, determination method and program |
| EP3605504A4 (en) * | 2017-03-30 | 2020-12-16 | Pioneer Corporation | DETERMINATION DEVICE, DETERMINATION METHOD, AND PROGRAM |
| JPWO2018181974A1 (ja) * | 2017-03-30 | 2020-05-14 | パイオニア株式会社 | 判定装置、判定方法、及び、プログラム |
| JP2018194346A (ja) * | 2017-05-15 | 2018-12-06 | 日本電気株式会社 | 画像処理装置、画像処理方法及び画像処理プログラム |
| JPWO2018212301A1 (ja) * | 2017-05-19 | 2020-03-12 | パイオニア株式会社 | 自己位置推定装置、制御方法、プログラム及び記憶媒体 |
| JP2022031266A (ja) * | 2017-05-19 | 2022-02-18 | パイオニア株式会社 | 自己位置推定装置、制御方法、プログラム及び記憶媒体 |
| WO2018212301A1 (ja) * | 2017-05-19 | 2018-11-22 | パイオニア株式会社 | 自己位置推定装置、制御方法、プログラム及び記憶媒体 |
| WO2019188886A1 (ja) * | 2018-03-30 | 2019-10-03 | パイオニア株式会社 | 端末装置、情報処理方法、プログラム、及び、記憶媒体 |
| JP2019197356A (ja) * | 2018-05-09 | 2019-11-14 | トヨタ自動車株式会社 | 自動運転システム |
| US11467576B2 (en) | 2018-05-09 | 2022-10-11 | Toyota Jidosha Kabushiki Kaisha | Autonomous driving system |
| JP2019215875A (ja) * | 2019-07-03 | 2019-12-19 | 三菱電機株式会社 | 情報処理装置 |
| KR20210042213A (ko) * | 2019-10-08 | 2021-04-19 | 주식회사 엠큐닉 | 정밀도로지도 품질평가 점수 생성 및 배포 시스템 |
| KR102286178B1 (ko) * | 2019-10-08 | 2021-08-09 | 주식회사 엠큐닉 | 정밀도로지도 품질평가 점수 생성 및 배포 시스템 |
| US11868135B2 (en) | 2020-07-06 | 2024-01-09 | Honda Motor Co., Ltd. | Processing device, processing method, and medium for evaluating map reliability for vehicles |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011027594A (ja) | 地図データ検証システム | |
| JP2011027595A (ja) | 地図データ検証システム | |
| CN107851125B9 (zh) | 通过车辆和服务器数据库进行两步对象数据处理以生成、更新和传送精确道路特性数据库的系统和方法 | |
| CN107850672B (zh) | 用于精确车辆定位的系统和方法 | |
| CN105793669B (zh) | 车辆位置推定系统、装置、方法以及照相机装置 | |
| Brenner | Extraction of features from mobile laser scanning data for future driver assistance systems | |
| WO2017212639A1 (ja) | 情報処理装置、計測装置及び制御方法 | |
| JP2016014647A (ja) | 自車位置認識装置及び方法 | |
| JP4923736B2 (ja) | 道路通信システムおよび道路通信方法 | |
| JP2007232690A (ja) | 現在地検出装置、地図表示装置、および現在地検出方法 | |
| KR20130127822A (ko) | 도로상 물체 분류 및 위치검출을 위한 이종 센서 융합처리 장치 및 방법 | |
| JP5365792B2 (ja) | 車両用位置測定装置 | |
| JP2007010335A (ja) | 車両位置検出装置及びシステム | |
| JP3666332B2 (ja) | 歩行者検知装置 | |
| JP2007309799A (ja) | 車載測距装置 | |
| JP6647171B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP2008097279A (ja) | 車両外部情報表示装置 | |
| JP2024026188A (ja) | 情報処理装置、計測装置及び制御方法 | |
| KR20160125803A (ko) | 영역 추출 장치, 물체 탐지 장치 및 영역 추출 방법 | |
| JP5891802B2 (ja) | 車両位置算出装置 | |
| JP5903901B2 (ja) | 車両位置算出装置 | |
| TWI811954B (zh) | 定位系統及物件位置的校正方法 | |
| US20220189039A1 (en) | System and method for camera-based distributed object detection, classification and tracking | |
| WO2022030033A1 (ja) | 地物データの生成システム、地物データベース更新システム及び地物データの生成方法 | |
| KR101887647B1 (ko) | 가시거리 기반의 경보 방법 및 이를 위한 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20121002 |