JP2011007187A - 風力タービンのヨーイングを制御するための装置および方法 - Google Patents
風力タービンのヨーイングを制御するための装置および方法 Download PDFInfo
- Publication number
- JP2011007187A JP2011007187A JP2010143619A JP2010143619A JP2011007187A JP 2011007187 A JP2011007187 A JP 2011007187A JP 2010143619 A JP2010143619 A JP 2010143619A JP 2010143619 A JP2010143619 A JP 2010143619A JP 2011007187 A JP2011007187 A JP 2011007187A
- Authority
- JP
- Japan
- Prior art keywords
- channel
- air flow
- wind
- wind turbine
- yaw angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0204—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor for orientation in relation to wind direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D80/00—Details, components or accessories not provided for in groups F03D1/00 - F03D17/00
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D80/00—Details, components or accessories not provided for in groups F03D1/00 - F03D17/00
- F03D80/40—Ice detection; De-icing means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/32—Wind speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/321—Wind directions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/324—Air pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/329—Azimuth or yaw angle
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Wind Motors (AREA)
- Indicating Or Recording The Presence, Absence, Or Direction Of Movement (AREA)
Abstract
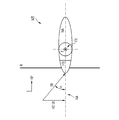
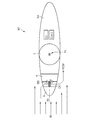
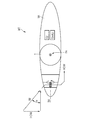
【解決手段】風力タービンがナセルとハブを有しており、ナセルは調整可能なヨー角で第1軸回りに回転し、ハブはナセルに接続されており、回転軸回りに回転でき、進入風によって第1軸回りに回転させられる少なくとも1つの回転翼を備えており、回転翼が回転軸に垂直なロータ面を画定し、風力タービンは開口部を備えたチャネルを有しており、開口部はロータ面から所定の距離に位置しており、進入風の少なくとも1つの成分を空気流として開口部を通ってチャネル内へと案内し、チャネルは空気流がチャネルを通るときに空気流のパラメータを測定する測定装置を有しており、測定装置は空気流の測定されたパラメータを用いて進入風の方向と回転軸との間のヨー角誤差を検出するコントローラに接続されており、ヨー角誤差がナセルの調整に使用される。
【選択図】図4
Description
ContU 制御ユニット
CU 計算ユニット
FA 第1軸
H ハブ
HB ハブ
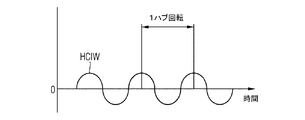
HCIW 進入風の水平成分
IW 進入風
MD 測定装置
NA ナセル
RA 回転軸
RP ロータ面
T タワー
WT 風力タービン
Claims (17)
- 風力タービンのヨーイングを制御する装置において、
前記風力タービンはナセルとハブを有しており、
前記ナセルは調整可能なヨー角で第1軸回りに回転できるように取り付けられており、
前記ハブは前記ナセルに接続されており、前記ハブは回転軸回りに回転できるように取り付けられており、
前記ハブは進入風によって前記第1軸回りに回転させられる少なくとも1つの回転翼を備えており、前記回転翼によって前記回転軸に垂直なロータ面が画定され、
前記風力タービンは少なくとも1つの開口部を備えたチャネルを有しており、前記開口部は前記ロータ面から所定の距離に位置しており、前記進入風の少なくとも1つの成分が空気流として該開口部を通って前記チャネル内へと案内されるように配置されており、
前記チャネルは前記空気流が前記チャネルを通るときに前記空気流のパラメータを測定する測定装置を有しており、
前記測定装置は前記空気流の測定されたパラメータを用いて前記進入風の方向と前記回転軸との間のヨー角誤差を検出するコントローラに接続されており、前記ヨー角誤差が前記ナセルの調整に使用されることを特徴とする、風力タービンのヨーイングを制御する装置。 - 前記チャネルの少なくとも一部が前記回転軸から半径方向外側に向かって広がっており、
前記チャネルの長手軸が実質的に前記回転翼の長手軸に平行である、請求項1記載の装置。 - 前記測定装置は、前記チャネル内の空気流の方向および/または速度をパラメータとして測定する、および/または、前記空気流から生じる前記チャネル内の空気圧差をパラメータとして測定する、請求項1または2記載の装置。
- 前記測定装置は前記空気流のパラメータを測定する超音波トランスジューサを有している、請求項1から3のいずれか1項記載の装置。
- 前記測定装置は、前記空気流が通過したときに回転によって前記空気流のパラメータを測定するプロペラまたは羽根車を有している、請求項1から3のいずれか1項記載の装置。
- 前記測定装置はバルブを有しており、該バルブは少なくとも2つの位置をとり、
前記バルブの位置がエンコーダによって読み取られ、前記チャネル内の空気流の方向が検出される、請求項1から3のいずれか1項記載の装置。 - 前記チャネルの開口部は前記ロータ面に対して垂直でない前記進入風の成分を捕捉するために前記ロータ面に対して傾いている、請求項1から6のいずれか1項記載の装置。
- 前記チャネルは前記ハブを通っており、および/または
前記チャネルは前記ハブの両側に前記回転軸または前記ロータ面からの所定の距離を以て開口部を有している、請求項1から7のいずれか1項記載の装置。 - 前記風力タービンは、前記回転翼の位置を前記測定装置からの測定値と比較し、前記ヨー角誤差を推定する計算ユニットを有している、請求項1から8のいずれか1項記載の装置。
- 前記風力タービンは、前記測定値を通時的に分析して前記ヨー角誤差を求める計算ユニットを有しており、該計算ユニットは、前記測定値の分析を用いて前記ナセルのヨーイングを制御する制御ユニットに接続されている、請求項1から8のいずれか1項記載の装置。
- 前記チャネルと前記開口部の断面積は、前記チャネルと前記開口部への塩、埃、または氷の堆積が防止されるように選ばれている、請求項1から10のいずれか1項記載の装置。
- 前記チャネルの前記少なくとも1つの開口部は前記ロータ面から所定の距離に位置しており、該開口部は前記進入風の少なくとも1つの成分が空気流として該開口部を通って前記チャネル内へと案内されるように配置されている、請求項1から11のいずれか1項記載の装置。
- 風力タービンのヨーイングを制御する方法において、
前記風力タービンのナセルは調整可能なヨー角で第1軸回りに回転させることができ、
前記ナセルに接続された、前記風力タービンのハブを回転軸回りに回転させ、
前記ハブに接続された少なくとも1つの翼を進入風によって前記回転軸回りに回転させ、
前記回転翼が前記回転軸に垂直なロータ面を画定し、
前記進入風の少なくとも1つの成分を空気流として少なくとも1つの開口部を通って前記風力タービンのチャネル内へと案内し、
前記空気流が前記チャネルを通る間に前記空気流のパラメータを測定し、
前記空気流の測定したパラメータを用いて、前記進入風の方向と前記回転軸との間のヨー角誤差を検出し、
検出したヨー角誤差に従って前記ナセルのヨー角を調整することを特徴とする、風力タービンのヨーイングを制御する方法。 - 前記チャネル内で、
前記空気流の方向を検出し、および/または
前記空気流の速度を測定し、および/または
前記空気流から生じる空気圧力差を測定し、
測定値を前記空気流のパラメータとして用いる、請求項13記載の方法。 - 前記風力タービンの計算ユニットにおいて、前記回転翼の位置と前記測定されたパラメータを比較し、ヨー角誤差を推定する、請求項13または14記載の方法。
- 前記測定されたパラメータを時間積分し、前記ヨー角誤差を求める、請求項13記載の方法。
- 前記進入風が前記ロータ面を通過する前に、前記進入風の前記少なくとも1つの成分を空気流として前記少なくとも1つの開口部を通って前記風力タービンの前記チャネル内へと案内する、請求項13記載の方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09008270A EP2267301B1 (en) | 2009-06-24 | 2009-06-24 | Arrangement and method to control the yawing of a wind turbine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011007187A true JP2011007187A (ja) | 2011-01-13 |
| JP2011007187A5 JP2011007187A5 (ja) | 2013-05-09 |
Family
ID=41426352
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010143619A Pending JP2011007187A (ja) | 2009-06-24 | 2010-06-24 | 風力タービンのヨーイングを制御するための装置および方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US8506247B2 (ja) |
| EP (1) | EP2267301B1 (ja) |
| JP (1) | JP2011007187A (ja) |
| CN (1) | CN101929426B (ja) |
| CA (1) | CA2708194A1 (ja) |
| DK (1) | DK2267301T3 (ja) |
| ES (1) | ES2393046T3 (ja) |
| NZ (1) | NZ585056A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014181704A (ja) * | 2013-03-15 | 2014-09-29 | Frontier Wind Llc | ブレードバランシング |
| JP2015506444A (ja) * | 2012-02-08 | 2015-03-02 | ロモ ウインド アーゲー | 風力タービンのヨーを調節するための装置 |
| KR101778912B1 (ko) | 2017-01-05 | 2017-09-26 | 주식회사 로맥스인싸이트코리아 | 풍력발전기의 요 정렬오차 보정장치 |
| KR101800217B1 (ko) | 2017-01-06 | 2017-11-23 | 주식회사 로맥스인싸이트코리아 | 풍력발전기의 요 정렬오차 보정방법 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2010201621B1 (en) * | 2010-02-10 | 2011-08-25 | Mitsubishi Heavy Industries, Ltd. | Wind turbine generator and method of controling the same |
| WO2012118549A1 (en) | 2010-12-09 | 2012-09-07 | Northern Power Systems, Inc. | Systems for load reduction in a tower of an idled wind-power unit and methods thereof |
| CN102213181B (zh) * | 2011-05-03 | 2012-12-19 | 三一电气有限责任公司 | 一种风机偏航角度计算方法及计算系统 |
| DK177292B1 (en) | 2011-06-30 | 2012-10-08 | Envision Energy Denmark Aps | A wind turbine and an associated yaw control method |
| US8890349B1 (en) * | 2012-01-19 | 2014-11-18 | Northern Power Systems, Inc. | Load reduction system and method for a wind power unit |
| ES2823800T3 (es) | 2012-04-17 | 2021-05-10 | Siemens Gamesa Renewable Energy As | Sistema de medición de turbinas eólicas |
| DE102012220502A1 (de) * | 2012-11-09 | 2014-06-12 | Wobben Properties Gmbh | Windenergieanlage |
| DK2860392T3 (en) * | 2013-10-09 | 2018-05-07 | Siemens Ag | Method for adjusting the angle of rotation of a wind turbine in relation to a given wind direction |
| ES2600861B1 (es) | 2015-07-03 | 2017-11-21 | Gamesa Innovation & Technology, S.L. | Sistema de control para detectar y evitar situaciones de desalineamiento en aerogeneradores |
| US10539116B2 (en) | 2016-07-13 | 2020-01-21 | General Electric Company | Systems and methods to correct induction for LIDAR-assisted wind turbine control |
| EP3519693B1 (en) * | 2016-09-29 | 2020-09-16 | Vestas Wind Systems A/S | Control method for a wind turbine |
| EP3301297A1 (en) * | 2016-09-30 | 2018-04-04 | Siemens Aktiengesellschaft | Damage detection of a rotor blade of a wind turbine |
| CN109723608A (zh) * | 2017-10-31 | 2019-05-07 | 上海泰胜风能装备股份有限公司 | 风力发电机 |
| EP3530934A1 (en) * | 2018-02-22 | 2019-08-28 | Siemens Gamesa Renewable Energy A/S | Method for controlling yawing of a wind turbine |
| US20220074390A1 (en) * | 2018-12-21 | 2022-03-10 | Romo Wind Ag | A method and a system for determing the wind speed or the wind direction experienced by a wind turbine |
| CN110761947B (zh) * | 2019-11-15 | 2020-09-11 | 华北电力大学 | 一种风电机组偏航校准方法及系统 |
| CN111904831B (zh) * | 2020-08-23 | 2024-08-30 | 刘建东 | 一种用于按摩枪的偏心距可变的联动机构 |
| CN112031997B (zh) * | 2020-09-15 | 2021-08-13 | 华北电力科学研究院有限责任公司 | 一种风电机组偏航静态偏差确定方法、装置 |
| CN112855442B (zh) * | 2021-01-18 | 2022-03-29 | 青岛绿色发展研究院有限公司 | 一种基于振动和倾角的风机对风优化方法及系统 |
| CN114963483B (zh) * | 2021-02-20 | 2023-07-07 | 浙江盾安人工环境股份有限公司 | 分液器 |
| CN114439686B (zh) * | 2022-01-21 | 2025-07-08 | 许昌许继风电科技有限公司 | 一种风力发电机组偏航优化控制系统及其控制方法 |
| CN115076028A (zh) * | 2022-05-20 | 2022-09-20 | 青岛绿色发展研究院有限公司 | 风电机组对风方法、系统、风电机组及存储介质 |
| CN117052603B (zh) * | 2023-07-10 | 2024-04-19 | 太原重工股份有限公司 | 风电机组偏航启动控制方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005188455A (ja) * | 2003-12-26 | 2005-07-14 | Daiwa House Ind Co Ltd | プロペラ型風力発電システム |
| US7377159B2 (en) * | 2005-08-16 | 2008-05-27 | Honeywell International Inc. | Methods and system for determining angles of attack and sideslip using flow sensors |
| US20090039651A1 (en) * | 2007-07-20 | 2009-02-12 | Siemens Aktiengesellschaft | Method for wind turbine yaw control |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4757211A (en) * | 1987-07-10 | 1988-07-12 | Danregn Vidraft A/S | Machine for generating electricity |
| ATE378603T1 (de) * | 2004-03-26 | 2007-11-15 | Univ Danmarks Tekniske | Verfahren und vorrichtung zur ermittlung der von einer windturbine erfahrenen windgeschwindigkeit und -richtung |
| CN102536658B (zh) * | 2005-05-31 | 2014-10-01 | 株式会社日立制作所 | 水平轴风车 |
| ES2306609B1 (es) | 2007-04-23 | 2009-09-11 | GAMESA INNOVATION & TECHNOLOGY, S.L. | Veleta para aerogenerador. |
| DE202007006089U1 (de) * | 2007-04-26 | 2007-07-12 | Lucks, Christoph | Windmesssystem für eine Windenergieanlage |
| US20090030752A1 (en) * | 2007-07-27 | 2009-01-29 | General Electric Company | Fleet anomaly detection method |
| US8235662B2 (en) | 2007-10-09 | 2012-08-07 | General Electric Company | Wind turbine metrology system |
| US20100054941A1 (en) * | 2008-08-27 | 2010-03-04 | Till Hoffmann | Wind tracking system of a wind turbine |
| US8317471B2 (en) * | 2011-11-29 | 2012-11-27 | General Electric Company | Method for preventing rotor overspeed of a wind turbine |
-
2009
- 2009-06-24 EP EP09008270A patent/EP2267301B1/en not_active Not-in-force
- 2009-06-24 DK DK09008270.2T patent/DK2267301T3/da active
- 2009-06-24 ES ES09008270T patent/ES2393046T3/es active Active
-
2010
- 2010-04-30 NZ NZ585056A patent/NZ585056A/en not_active IP Right Cessation
- 2010-06-08 US US12/795,762 patent/US8506247B2/en not_active Expired - Fee Related
- 2010-06-22 CA CA2708194A patent/CA2708194A1/en not_active Abandoned
- 2010-06-24 CN CN201010215306.0A patent/CN101929426B/zh not_active Expired - Fee Related
- 2010-06-24 JP JP2010143619A patent/JP2011007187A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005188455A (ja) * | 2003-12-26 | 2005-07-14 | Daiwa House Ind Co Ltd | プロペラ型風力発電システム |
| US7377159B2 (en) * | 2005-08-16 | 2008-05-27 | Honeywell International Inc. | Methods and system for determining angles of attack and sideslip using flow sensors |
| US20090039651A1 (en) * | 2007-07-20 | 2009-02-12 | Siemens Aktiengesellschaft | Method for wind turbine yaw control |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015506444A (ja) * | 2012-02-08 | 2015-03-02 | ロモ ウインド アーゲー | 風力タービンのヨーを調節するための装置 |
| JP2014181704A (ja) * | 2013-03-15 | 2014-09-29 | Frontier Wind Llc | ブレードバランシング |
| KR101778912B1 (ko) | 2017-01-05 | 2017-09-26 | 주식회사 로맥스인싸이트코리아 | 풍력발전기의 요 정렬오차 보정장치 |
| KR101800217B1 (ko) | 2017-01-06 | 2017-11-23 | 주식회사 로맥스인싸이트코리아 | 풍력발전기의 요 정렬오차 보정방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2267301B1 (en) | 2012-10-03 |
| US8506247B2 (en) | 2013-08-13 |
| CA2708194A1 (en) | 2010-12-24 |
| CN101929426A (zh) | 2010-12-29 |
| ES2393046T3 (es) | 2012-12-18 |
| NZ585056A (en) | 2011-11-25 |
| CN101929426B (zh) | 2015-08-05 |
| US20100329842A1 (en) | 2010-12-30 |
| DK2267301T3 (da) | 2012-11-26 |
| EP2267301A1 (en) | 2010-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011007187A (ja) | 風力タービンのヨーイングを制御するための装置および方法 | |
| US7347668B2 (en) | Method and apparatus to determine the wind speed and direction experienced by a wind turbine | |
| US8093738B2 (en) | Method for wind turbine yaw control | |
| US7086835B2 (en) | Horizontal axis wind turbine and method for controlling horizontal axis wind turbine | |
| WO2011150942A1 (en) | An improved wind turbine doppler anemometer | |
| JP2011007187A5 (ja) | ||
| TW201402940A (zh) | 用於調整風力機之橫擺的裝置 | |
| CN101660494A (zh) | 风力涡轮机的风力追踪系统 | |
| CA2985733C (en) | Measuring assembly on a wind turbine | |
| EP2267460B1 (en) | Method and apparatus for measuring wind velocity | |
| ES2658364T3 (es) | Procedimiento de control del ángulo de paso de al menos una pala de turbina eólica | |
| GB2466200A (en) | A Detection System of an Angle of Attack of Air Flow over a Wind Turbine Rotor Blade | |
| US9920744B2 (en) | System and method for detecting rotor asymmetry | |
| CN103867384A (zh) | 降低加载风能设备的转子的俯仰力矩的方法和装置 | |
| US20220074390A1 (en) | A method and a system for determing the wind speed or the wind direction experienced by a wind turbine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101227 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101228 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130425 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140310 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140908 |