JP2010200419A - Outer rotor type rotating electric machine - Google Patents
Outer rotor type rotating electric machine Download PDFInfo
- Publication number
- JP2010200419A JP2010200419A JP2009039983A JP2009039983A JP2010200419A JP 2010200419 A JP2010200419 A JP 2010200419A JP 2009039983 A JP2009039983 A JP 2009039983A JP 2009039983 A JP2009039983 A JP 2009039983A JP 2010200419 A JP2010200419 A JP 2010200419A
- Authority
- JP
- Japan
- Prior art keywords
- outer rotor
- substrate
- rotor type
- sensor
- type rotating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



















Landscapes
- Brushless Motors (AREA)
Abstract
Description
本発明は、自動二輪車のエンジン等に設けられるアウタロータ型の回転電機の技術分野に関するものである。 The present invention relates to a technical field of an outer rotor type rotating electrical machine provided in an engine or the like of a motorcycle.
一般に、自動二輪車のエンジンに設けられるアウタロータ型の回転電機は、エンジンの外壁上に固定されるステータコアと、エンジンのクランクシャフトに固定され、ステータコアの周りを回転するロータと、ステータコアに固定され、ロータの回転位置を検出する検出センサとを有している。ステータコアは、磁性材料からなる複数のコアプレートを積層形成したものであって、円環状に形成された本体部と、本体部から放射状に突出形成されたT字形状のティース部とを有しており、ステータコアのティース部には、コイルが巻装されている。ロータは、磁性材料からなる有底円筒状に形成されており、複数のマグネットを有している。検出センサは、複数のホールICと、ホールICが接続された基板とを有している。 2. Description of the Related Art Generally, an outer rotor type rotating electrical machine provided in an engine of a motorcycle is a stator core fixed on the outer wall of the engine, a rotor fixed to the crankshaft of the engine and rotating around the stator core, and a rotor fixed to the stator core. And a detection sensor for detecting the rotational position of the motor. The stator core is formed by laminating a plurality of core plates made of a magnetic material, and has a main body part formed in an annular shape and a T-shaped tooth part formed radially projecting from the main body part. A coil is wound around the teeth portion of the stator core. The rotor is formed in a bottomed cylindrical shape made of a magnetic material and has a plurality of magnets. The detection sensor has a plurality of Hall ICs and a substrate to which the Hall ICs are connected.
基板には、リード線が接続されており、リード線は制御部と電気的に接続される。したがって、ホールICと制御部は、電気的に接続される。そのため、ホールICが、ロータに配設されたマグネットの磁束の方向の切り替わりを検出すると、制御部は、信号を生成する。この信号に基づいて、制御部はエンジンを所定のタイミングで点火し、コイルに電流を供給する(例えば、特許文献1参照)。 Lead wires are connected to the substrate, and the lead wires are electrically connected to the control unit. Therefore, the Hall IC and the control unit are electrically connected. For this reason, when the Hall IC detects a change in the direction of the magnetic flux of the magnet disposed in the rotor, the control unit generates a signal. Based on this signal, the control unit ignites the engine at a predetermined timing and supplies current to the coil (see, for example, Patent Document 1).
ところが、前記従来のものでは、リード線は、各々、基板に形成された貫通孔に挿入される。そのため、作業者は、リード線を基板に挿入し難く、検出センサを容易に製造することができなかった。 However, in the conventional device, each lead wire is inserted into a through hole formed in the substrate. Therefore, it is difficult for an operator to insert the lead wire into the substrate, and the detection sensor cannot be easily manufactured.
そのため、容易に製造可能な検出センサが望まれており、本発明の目的は、この課題を解決する検出センサを備えたアウタロータ型の回転電機を提供することにある。 Therefore, a detection sensor that can be easily manufactured is desired, and an object of the present invention is to provide an outer rotor type rotating electrical machine including a detection sensor that solves this problem.
請求項1に記載された発明は、略T字状に形成された複数のティース部を備えた磁性材料からなるステータコアと、ステータコアのティース部に巻装されたコイルと、ステータコアの周りを回転する碗形状のロータと、ロータの内周面に磁極を交互にして配設された複数のマグネットと、ステータコア上に配置され、ロータの回転位置を検出する検出センサとを有するアウタロータ型の回転電機において、検出センサは、略扇状に形成されたセンサケースと、センサケース内に収容されるセンサユニットとを有しており、センサユニットは、マグネットの磁束の方向の切り替わりを検出する複数のホールICと、複数のホールICが取り付けられる略扇形状のベース部材と、ベース部材に固定され、複数のホールICと電気的に接続される扇形状の基板と、基板に接続されるリード線とを有しており、センサケースの内周面には、センサケースから導き出されたリード線を収束するハウジングが一体的に形成されていることを特徴とするアウタロータ型の回転電機である。
The invention described in
請求項2に記載された発明は、請求項1に記載されたアウタロータ型の回転電機において、ハウジングは、リード線が挿入される第1の開口部と、第1の開口部に挿入されたリード線が引き出される第2の開口部と、第1の開口部に挿入されたリード線を、第2の開口部に案内するガイド部とを備えたことを特徴とするアウタロータ型の回転電機である。 According to a second aspect of the present invention, in the outer rotor type rotating electric machine according to the first aspect, the housing includes a first opening into which the lead wire is inserted, and a lead inserted into the first opening. An outer rotor type rotating electrical machine comprising a second opening from which a wire is drawn out, and a guide for guiding a lead wire inserted into the first opening to the second opening. .
請求項3に記載された発明は、請求項1または請求項2に記載されたアウタロータ型の回転電機において、基板には、リード線が挿入される複数の貫通孔が形成されており、センサケースの底面には、センサケースの内周面に沿って形成された複数の突出片と、基板の複数の貫通孔に対応する位置に形成された複数の挿入部とが形成されており、リード線は、センサケースの底面に形成された挿入部を介して、複数の貫通孔に挿入され、突出片によって保持されることを特徴とするアウタロータ型の回転電機である。 According to a third aspect of the present invention, in the outer rotor type rotating electric machine according to the first or second aspect, the substrate has a plurality of through holes into which lead wires are inserted, and the sensor case A plurality of projecting pieces formed along the inner peripheral surface of the sensor case and a plurality of insertion portions formed at positions corresponding to the plurality of through holes of the substrate are formed on the bottom surface of the lead wire. Is an outer rotor type rotating electrical machine which is inserted into a plurality of through holes through an insertion portion formed on the bottom surface of the sensor case and held by a protruding piece.
請求項4に記載された発明は、請求項1から請求項3のいずれか1項に記載されたアウタロータ型の回転電機において、検出センサは、複数のホールICが取り付けられるベース部材を有しており、ベース部材は、扇形状の本体部と、本体部から突出形成された1対の第1の固定部とを有しており、基板は、ベース部材の第1の固定部によって、ベース部材の本体部に取り付けられることを特徴とするアウタロータ型の回転電機である。 According to a fourth aspect of the present invention, in the outer rotor type rotating electric machine according to any one of the first to third aspects, the detection sensor has a base member to which a plurality of Hall ICs are attached. The base member has a fan-shaped main body portion and a pair of first fixing portions protruding from the main body portion, and the substrate is formed by the first fixing portion of the base member. The outer rotor type rotating electrical machine is attached to the main body of the outer rotor.
請求項5に記載された発明は、請求項1から請求項4のいずれか1項に記載されたアウタロータ型の回転電機において、センサケースは、センサケースの底面から突出形成された第2の固定部を有しており、基板は、第2の固定部によって、センサケースに固定されることを特徴とするアウタロータ型の回転電機である。 According to a fifth aspect of the present invention, in the outer rotor type rotating electrical machine according to any one of the first to fourth aspects, the sensor case projects from the bottom surface of the sensor case. And the substrate is fixed to the sensor case by the second fixing portion.
本発明によると、リード線は、センサケースに形成された挿入部に挿入することで、基板の貫通孔に挿入される。そのため、作業者は、効率よく、リード線を基板に接続することができ、検出センサは、容易に製造される。 According to the present invention, the lead wire is inserted into the through hole of the substrate by being inserted into the insertion portion formed in the sensor case. Therefore, the operator can efficiently connect the lead wire to the substrate, and the detection sensor is easily manufactured.
次に、本発明のアウタロータ型の回転電機を、始動発電機に適用した場合について、図1から図20に基づいて説明する。 Next, the case where the outer rotor type rotating electrical machine of the present invention is applied to a starter generator will be described with reference to FIGS.
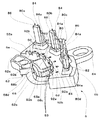
図1は、本発明の実施形態における始動発電機1の斜視図であり、図2は、図1の始動発電機1のA−A断面図、図3は、始動発電機1の正面図である。図1、図2、図3に示されるように、始動発電機1は、車両のエンジン(不図示)に固定されるステータコア2と、エンジンのクランクシャフト(不図示)に固定されるロータ4と、ロータ4の回転位置を検出する略扇形状の検出センサ6とを有している。
1 is a perspective view of a
ステータコア2は、磁性材料からなる複数のコアプレートを積層し形成されたものであって、円環状に形成された本体部2aと、T字状に形成された18個のティース部2bを有しており、ティース部2bには、インシュレータ110が装着されている。また、ティース部2bには、インシュレータ110を介して、コイル10が巻装されている。
The
エンジンのクランクシャフトに固定されるロータ4は、磁性材料からなる碗形状のヨーク12と、ヨーク12の底面部12aに固定されたボス部14とを有しており、ロータ4の内周面部4aには、12個のマグネット16が磁極を交互にして配設されている。
The
不図示の制御部は、ステータコア2に巻装されたコイル10に電流を供給し、ロータ4を回転させる。ロータ4は、不図示のエンジンのクランクシャフトに連結されているため、ロータ4が回転すると、ロータ4に連結されたエンジンのクランクシャフトは回転し、エンジンは、始動される。
A control unit (not shown) supplies current to the
エンジンの始動後、ロータ4がエンジンの回転に伴ってステータコア2の周りを回転すると、ステータコア2に巻装されたコイル10には、誘導起電力が生じる。なお、マグネット16は、マグネットカバー18によって保護されており、マグネットカバー18は、ロータ4の底面部4bに形成されたエンボス4dによってカシメ固定されている。
When the
検出センサ6は、検出センサ6の内周面部6aから突出形成された支持部62と、検出センサ6の外周面部6bから突出形成された支持部64とを有している。支持部62は、不図示の螺子等によって、ステータコア2の本体部2aに固定され、支持部64は、不図示のボルト等によって、車両のエンジンに固定される。すなわち、検出センサ6は、支持部62を介してステータコア2の本体部2aに固定され、支持部64を介して車両のエンジンに固定される。
The
検出センサ6は、検出センサ6の外側の底面部6dに突出形成された脚部80a、80b、80c、80dを有し、脚部80a、80b、80c、80dは、各々、ホールIC50a、50b、50c、50dを収容する。脚部80a、80b、80c、80dは、各々、ステータコア2のティース部2bの間に配され、ロータ4の内周面部4aに対向して配置される。なお、ホールIC50a、50b、50c、50dは、検出センサ6に注入された充填材150によって保護されている。ロータ4がステータコア2の周りを回転すると、各ホールIC50a、50b、50c、50dは、マグネット16から生じる磁束の方向の切り替わりを検出し、検出センサ6は、ロータ4の回転位置を検出する。ホールIC50a、50b、50c、50dは、ロータ4の内周面部4aに配設されたマグネット16の磁界そのものを検出するため、検出センサ6は、ロータ4の回転位置を正確に検出する。さらに、従来のように、ロータ4のボス部14に、マグネット16を設ける必要がない。そのため、ボス部14の軸長は短縮され、部品点数は削減される。さらに、エンジンが所定のタイミングで点火されるため、エンジンの出力は増加し、燃料の消費は低減する。
The
また、ホールIC50a、50b、50c、50dは、各々、脚部80a、80b、80c、80dに収容されているため、ステータコア2のティース部2bの間に配される。そのため、各ホールIC50a、50b、50c、50dは、励磁されたコイル10が発生する磁界の影響を受けることはない。したがって、ホールIC50a、50b、50c、50dは、マグネット16から生じる磁束の方向の切り替わりを確実に検出する。
Further, the
各ホールIC50a、50b、50c、50dは、リード線100aと電気的に接続され、リード線100aは、保護チューブ102aによって被覆されている。同様にして、コイル10は、リード線100bと電気的に接続され、リード線100bは、保護チューブ102bによって被覆されている。保護チューブ102a、102bは、ステータコア2に固定される保持部材130によって保持されている。リード線100a、100bは、保護チューブ102a、102bを介して保持部材130に保持され、ロータ4の外側へ引き出され、制御部と接続される。なお、保持部材130は、平板状の金属板をプレス加工などによって形成されたものであり、ステータコア2に螺入される螺子132によって、ステータコア2に固定されている。
Each
図4はステータコア2の本体部2aから検出センサ6を取り外した状態を示す正面図である。図5は、ステータコアの斜視図であって、図6は、インシュレータの斜視図である。
FIG. 4 is a front view showing a state where the
検出センサ6の外側の底面部6dに突出形成された脚部80a、80b、80c、80dは、検出センサ6の外側の底面部6dから突出形成された基端部82と、基端部82から延出形成された中間部84と、中間部84から延出形成された先端部86とを有している。基端部82の幅は、中間部84の幅よりも大きく形成されており、先端部86の幅は、中間部84の幅と同一に形成されている。また、脚部80a、80b、80c、80dの先端部86は、中間部84の厚さと同一の厚さで形成された厚肉部86aと、厚肉部86aの厚さよりも薄く形成された1対の薄肉部86bとを有している。なお、厚肉部86aは、中間部84の幅よりも狭く形成され、1対の薄肉部86bの間に配されている。
ステータコア2は、円環状に形成された本体部2aと、本体部2aから放射状に突出形成された18個のティース部2bとを有しており、ティース部2bは、平面視T字状に形成されている。ティース部2bには、インシュレータ110が装着される。そのため、コイル10は、インシュレータ110を介して、ティース部2bに巻装されている。なお、ティース部2bに巻装されたコイル10には、ワニス材等が塗布されているため、コイル10は、ティース部2bに確実に固定される。
The
ティース部2bの先端部3aの両端には、切り欠き部3cが形成されており、ティース部2bの先端部3bの一端には、切り欠き部3cが形成されている。なお、各切り欠き部3cは、互いに対向して配置されている。すなわち、ティース部2bに形成された切り欠き部3cは、4個の受容部140a、140b、140c、140dを形成する。受容部140a、140b、140c、140dには、各々、検出センサ6の脚部80a、80b、80c、80dが挿入される。
A
なお、ステータコア2の本体部2aには、貫通孔2cが形成されており、貫通孔2cにはボルト(不図示)が挿入される。ボルトは、エンジンのケースに形成されたボルト孔(不図示)に螺入され、ステータコア2は、エンジンのケースに固定される。
A through hole 2c is formed in the
脚部80a、80b、80c、80dの中間部84の両端には、リブ84aが形成されており、脚部80a、80b、80c、80dの先端部86には、厚肉部86aと薄肉部86bとが形成されている。脚部80a、80b、80c、80dが、受容部140a、140b、140c、140dに挿入されると、厚肉部86aは、ティース部2bの間に配される。受容部140a、140b、140c、140dの一方の面は、中間部84に形成されたリブ84aに当接し、受容部140a、140b、140c、140dの他方の面は、先端部86に形成された薄肉部86bに当接する。したがって、受容部140a、140b、140c、140dに脚部80a、80b、80c、80dが挿入されると、検出センサ6は、傾倒することはない。
インシュレータ110は、樹脂などの絶縁材料からなる絶縁部材であって、円環状に形成された壁部112と、壁部112の外周面から放射状に突出形成された18個のティース保護部114とを有している。ティース保護部114は、先端部114a、114bと、本体部114cとを有しており、ステータコア2のティース部2bと略同一の形状に形成されている。なお、ティース保護部114の本体部114cには、多数の溝部114dが形成されている。そのため、ステータコア2の各ティース部には、コイル10が均一に巻装される。
The
また、ティース保護部114の先端部114aの両端には、テーパ形状の切り欠き部116が形成されており、ティース保護部114の先端部114bの一端には、テーパ形状の切り欠き部116が形成されている。先端部114a、114bに形成された切り欠き部116は、互いに対向して配置されている。コイル10は、テーパ形状の切り欠き部116に沿って、各ティース部2bに巻装されるため、作業者は、コイル10を効率よくステータコア2のティース部2bに巻装することができる。また、テーパ形状の切り欠き部116は、先端部114a、114bを補強し、インシュレータ110の剛性は向上する。
Further, tapered
インシュレータ110の壁部112の内周面には、平板部115が形成されており、平板部115は、端子120を含んでモールド成形されている。なお、端子120には、ステータコア2に巻装されたコイル10が接続される。
A
平板部115に固定された端子120は、インシュレータ110の壁部112によって囲繞されているため、ティース部2bに巻装されるコイル10と接触することはない。したがって、コイル10の巻線作業は、自動化される。
Since the terminal 120 fixed to the
図7は、ロータ4の内周面部4aの展開図である。ロータ4の内周面部4aに配設されたマグネット16は、N極に着磁された6個のマグネット16aと、S極に着磁された5個のマグネット16bと、N極に着磁された磁極部160とS極に着磁された磁極部162とを備えた1個のマグネット16cとを有している。なお、マグネット16cの磁極部160は、マグネット16cの一端に形成され、ホールIC50aが配置された位置M1と、ホールIC50b、50c、50dが配置された位置M2との間に配される。
FIG. 7 is a development view of the inner
また、磁極部162の軸方向の長さは、磁極部160の軸方向の長さよりも充分長く設定されている。本実施の形態において、磁極部162は、磁極部160の軸方向の長さのおよそ8倍の長さを有している。なお、マグネット16cに形成された磁極部162の軸方向の長さは、マグネット16cの磁極部160の軸方向の長さよりも、十分に大きく形成されていれば良い。
Further, the length of the
ホールIC50aは、ロータ4の開口周縁部4cに近接した位置M1に配置されるため、マグネット16a、16b、16cの一端から生じた磁束の方向の切り替わりを検出する。ホールIC50b、50c、50dは、マグネット16a、16b、16cに対向する位置M2に配置されているため、マグネット16a、16b、16cの中央から生じた磁束の方向の切り替わりを検出する。
Since the
図8は、検出センサ6の背面図であり、図9は検出センサ6の背面斜視図である。検出センサ6は、略扇状に形成されており、検出センサ6の外周面部6bには、支持部64が形成され、検出センサ6の内周面部6aには、支持部62とハウジング68とが形成されている。支持部62は、検出センサ6の内周面部6aから突出形成された1対の腕部62a、62bと、1対の腕部62a、62bを連結する連結部62cとを有しており、連結部62cは、螺子などの締結部材によって、ステータコア2の本体部2aに固定される。また、ハウジング68は、腕部62aに向かって開口形成された開口部68a(第1の開口部)と、脚部80aの延出方向に向かって開口形成された開口部68b(第2の開口部)と、開口部68aと開口部68bとを繋ぐガイド部68cと、台形状に形成された壁部68dとを有している。なお、ハウジング68に形成されたガイド部68cは、屈曲形成されており、検出センサ6の外側の底面部6dに対して傾斜している。したがって、ホールIC50a、50b、50c、50dと電気的に接続されるリード線100aは、腕部62aを跨いで開口部68aに挿入され、ガイド部68cに沿って開口部68bに案内される。
FIG. 8 is a rear view of the
また、検出センサ6の外側の底面部6dは、検出センサ6の内周面部6aに沿って形成された6個の挿入部72と7個の突出片92a、92bとを有しており、各挿入部72には、開口部68bに案内されたリード線100aが挿入される。なお、挿入部72は、検出センサ6の外側の底面部6dに対してテーパ状に形成された面取り部72bを有している。そのため、リード線100aは、スムーズに挿入部72に挿入される。
Further, the
検出センサ6の外側の底面部6dに形成された1対の突出片92aは、各々、1個のリブ93を有しており、5個の突出片92bは、各々、2個のリブ93を有している。また、5個の突出片92bは、1対の突出片92aの間に等間隔に配されている。そのため、突出片92a、92bに形成されたリブ93は、互いに向かい合って配置される。各挿入部72に挿入されたリード線100aは、各々、突出片92a、92bの間に配され、リブ93によって押しつぶされる。リード線100aは、突出片92a、92bによって確実に保持されるため、挿入部72から抜け落ちることはない。
Each of the pair of protruding
図10は、検出センサ6の斜視図であり、検出センサ6に充填される充填材150は取り除かれている。また、図11は、検出センサ6の分解斜視図である。図12は、センサユニット32の分解斜視図であり、図13は、ベース部材42の背面図である。
FIG. 10 is a perspective view of the
図10に示されるように、検出センサ6は、略扇状に形成されたセンサケース60と、センサケース60に収容されるセンサユニット32とを有している。センサケース60は、センサユニット32を収容するセンサユニット収容部66を有しており、センサユニット収容部66の内側の底面部66cには、1対の固定部70が突出形成されている。
As shown in FIG. 10, the
図11に示されるように、センサユニット32は、略扇状に形成された基板34と、基板34に固定された略扇形状のベース部材42と、ベース部材42に取り付けられた4個のホールIC50a、50b、50c、50dとを有している。なお、基板34には、1対の貫通孔36と、1対の貫通孔39とが形成されており、貫通孔36には、ベース部材42に形成された固定部49が挿入され、貫通孔39には、固定部70が挿入される。これによって、センサユニット32は、センサユニット収容部66内に固定される。
As shown in FIG. 11, the
図12に示されるように、基板34は、略扇形状に形成されており、基板34の内周部34aには、6個の貫通孔38が形成されており、基板34の外周部34bには、貫通孔35a、35b、35cが、各々、4個ずつ形成されている。なお、前述したように、基板34に形成された貫通孔36には、ベース部材42に形成された固定部49が挿入され、基板34に形成された貫通孔39には、センサケース60に形成された固定部70が挿入される。
As shown in FIG. 12, the
4個のホールIC50a、50b、50c、50dは、各々、マグネット16の磁束の方向の切り替わりを検出するセンサ素子52と、センサ素子52から延出する3本のリード54a、54b、54cとを有している。なお、ホールIC50aの3本のリード54a、54b、54cの長さは、ホールIC50b、50c、50dのリード54a、54b、54cの長さに比べて短い。
Each of the four
図12、図13に示されるように、ベース部材42は、略扇形状の本体部44と、本体部44の一方の平面から突出形成された4個のホルダ片46a、46b、46c、46dと、他方の平面から突出形成された固定部49とを有している。ホルダ片46a、46b、46c、46dは、各々、本体部44の一方の平面から突出形成された基端部47aと、基端部47aから延出形成された先端部47bとを有しており、先端部47bの幅は、基端部47aの幅よりも狭く形成されている。なお、各ホルダ片46a、46b、46c、46dには、ホールIC50a、50b、50c、50dが取り付けられる。
As shown in FIGS. 12 and 13, the
ホルダ片46aの先端部47bの長さは、ホルダ片46b、46c、46dの先端部47bの長さよりも短く形成されている。そのため、ホールIC50aは、ホールIC50b、50c、50dが配置された位置よりも、基板34に近接した位置に配される。そのため、図7で示したように、ホールIC50aは、ロータ4の開口周縁部4cに近接した位置M1に配置され、ホールIC50b、50c、50dは、マグネット16a、16b、16cに対向する位置M2に配置される。
The length of the
さらに、ベース部材42の本体部44は、切り欠き部45a、45b、45cを、各々、4個ずつ有しており、各切り欠き部45a、45b、45cは、基板34に形成された貫通孔35a、35b、35cと重なって配置される。そのため、ホルダ片46a、46b、46c、46dに取り付けられたホールIC50a、50b、50c、50dのリード54a、54b、54cは、ベース部材42に形成された切り欠き部45a、45b、45cを介して、基板34に形成された貫通孔35a、35b、35cに挿入される。
Further, the
なお、各ホルダ片46a、46b、46c、46dには、切り欠き部45a、45b、45cに対応する溝部48a、48b、48cが形成されている。したがって、ホールIC50a、50b、50c、50dのリード54a、54b、54cは、各々、溝部48a、48b、48c内に埋没されるため、ホルダ片46a、46b、46c、46dは、大型化することはない。
Each
また、基板34の内周部34aに形成された6個の貫通孔38は、各々、距離L1だけ離れて等間隔に配置されている。同様にして、センサケース60に形成された6個の挿入部72は、各々、距離L1だけ離れて等間隔に形成されている。そのため、センサユニット収容部66にセンサユニット32が固定されると、基板34に形成された貫通孔38は、各々、挿入部72と重なって配置される。
Further, the six through
そして、前述したように、挿入部72には、リード線100aが挿入される。挿入部72は、センサユニット収容部66の内側の底面部66cから、わずかに盛り上がって形成された隆起部72aを有している。そのため、挿入部72と基板34との間には、わずかの隙間しか形成されない。したがって、検出センサ6の外側の底面部6dから挿入部72に挿入されたリード線100aは、基盤34に形成された貫通孔38に挿入される。
As described above, the
基板34に形成された貫通孔35a、35b、35cに挿入された各リード54a、54b、54cは、ハンダにて基板34と電気的に接続される。同様にして基板34に形成された貫通孔38に挿入されたリード線100aは、ハンダにて基板34と電気的に接続される。すなわち、リード54a、54b、54cと、リード線100aとは、各々、電気的に接続される。
The
なお、前述したように、センサユニット32は、ベース部材44に形成された固定部49と、センサケース60に形成された固定部70とによって、センサケース60に固定されている。すなわち、作業者は、センサユニット32を支持することなく、リード54a、54b、54cと基板34とのハンダ付け作業および、リード線100aと基板34とのハンダ付け作業を行うことができる。
As described above, the
センサユニット収容部66の内側の底面部66cには、1対の台座部74が形成されている。センサユニット収容部66に配される基板34の外周部34bは、ベース部材42の本体部44によって支持され、基板34の内周部34aは、台座部74によって支持される。台座部74の高さは、ベース部材42の本体部44の厚さと等しいため、センサユニット32は、センサユニット収容部66内に安定して配置される。
A pair of
さらに、図1に示されるように、リード線100aは、挿入部72を介して基板34に接続される。そのため、リード線100aと基板34との接続部101は、センサユニット収容部66の内側の底面部66cと基板34との間に配されない。したがって、基板34は、センサユニット収容部66の内側の底面部66cに近接して配置される。すなわち、ホールIC50b、50c、50dは、マグネット16の中央に近接して配置され、マグネット16の磁束の方向の切り替わりを確実に検出する。
Further, as shown in FIG. 1, the
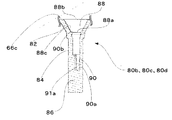
図14は、センサケース60の正面図であり、図15は、脚部80aの断面図であり、図16は、脚部80b、80c、80dの断面図である。図17は、凹部88の拡大図である。図18は、挿入部72の拡大図であり、図19は、挿入部72の断面図である。
14 is a front view of the
図15、図16に示されるように、センサケース60に形成された脚部80a、80b、80c、80dの基端部82は、各々、凹部88を有しており、中間部84は、各々、凹部90を有している。凹部88は、センサユニット収容部66の内側の底面部66cに向かって開口形成されており、凹部90は、凹部88の底面部88aに向かって開口形成されている。したがって、センサユニット収容部66にセンサユニット32が固定されると、ホールIC50a、50b、50c、50dは、凹部90内に挿入される。なお、凹部88の開口部88bの開口面積は、凹部90の開口部90bの開口面積よりも大きい。
As shown in FIGS. 15 and 16, the
凹部88の壁部88cは、センサユニット収容部66の内側の底面部66cに対して傾斜して形成されている。そのため、各ホールIC50a、50b、50c、50dは、各々、凹部88の壁部88cに沿って、凹部90内に挿入される。すなわち、作業者は、容易にホールIC50a、50b、50c、50dを、凹部90内に配することができる。
The
また、図17に示されるように、凹部90には、2個のリブ91aが形成されている。そのため、凹部90内に挿入されたホールIC50a、50b、50c、50dは、所定の位置に配置される。
Further, as shown in FIG. 17, two
脚部80a内に形成されたリブ91aの長さは、脚部80b、80c、80d内に形成されたリブ91aの長さよりも長く形成されている。そのため、ホールIC50aを、ロータ4の開口周縁部4cに近接した位置M1上に配置した場合であっても、ホールIC50aは、リブ91aに当接するため、所定の位置に配置される。
The length of the
前述したように、センサユニット収容部66内には、充填材150が注入される。図17に示されるように、センサユニット収容部66に形成された凹部88は、幅W1を有しており、図13に示されるように、ベース部材42の本体部44は、凹部88の幅W1よりも狭い幅W2を有している。そのため、ホールIC50a、50b、50c、50dが、凹部90内に配されても、凹部88の開口部88bは、ベース部材42の本体部44によって覆われることはない。したがって、センサユニット収容部66に注入される充填材150は、ベース部材42によって阻害されることなく、凹部90内に注入される。
As described above, the
前述したように、リード54a、54b、54cは、ホルダ片46a、46b、46c、46dに形成された溝部48a、48b、48c内に埋没されるため、ホルダ片46a、46b、46c、46dは、大型化しない。さらに、凹部90には、3個の溝部91bが形成されている。したがって、ホルダ片46a、46b、46c、46dは、凹部90を密閉することなく、凹部90内に配置される。そのため、充填材150は、ホルダ片46a、46b、46c、46dによって阻害されることなく、凹部90内に注入される。
As described above, since the
図18、図19に示されるように、センサケース60に形成された挿入部72には、6個のリブ73が等間隔に形成されている。そのため、リード線100aは、リブ73によって押し潰されながら、挿入部72に挿入される。リード線100aがリブ73によって押し潰されると、リード線100aは変形し、リブ73の間の隙間に侵入する。そのため、センサユニット収容部66に注入された充填材は、挿入部72を通って、センサケース60の外部へ漏洩することはない。
As shown in FIGS. 18 and 19, six
また、前述したように、リード線100aは、検出センサ6の外側の底面部6dから、挿入部72を介して、基板34に接続される。そのため、リード線100aは、センサユニット収容部66の開口周縁部66aを跨ぐことはない。したがって、充填材150は、リード線100aを伝って、検出センサ6の外部へと漏洩することはない。
Further, as described above, the
さらに、図18、図19に示されるように、リブ73は三角錐状に形成されているため、リード線100aを挿入部72に挿入する際に、リード線100aとリブ73との接触面積は、小さくなる。したがって、作業者は、効率よく、リード線100aを挿入部72に挿入することができる。
Further, as shown in FIGS. 18 and 19, since the
また、図12で示したように、ベース部材42の略中央には、半円形状の切り欠き部45dが形成されており、ベース部材42に固定される基板34の略中央には、貫通孔37が形成されている。基板34に形成された貫通孔37は、ベース部材42に形成された切り欠き部45dと重なって配置されるため、センサユニット収容部66の内側の底面部66cは、切り欠き部45dと貫通孔37とを介して、露出している。したがって、センサケース60の内側の底面部66cと、センサユニット32との間に蓄積される空気は、切り欠き部45dに重なって配置された貫通孔37を介して、センサケース60の外部に輩出される。すなわち、センサユニット32とセンサユニット収容部66の内側の底面部66cとの間に空気が溜まらないため、センサユニット32は、充填材150によって、確実に保護される。
As shown in FIG. 12, a
図20は、制御部が生成する信号の波形を示す図である。 FIG. 20 is a diagram illustrating a waveform of a signal generated by the control unit.
前述したように、ホールIC50a、50b、50c、50dのリード54a、54b、54cは、基板32を介して、リード線100aと電気的に接続されており、リード線100aは、制御部と電気的に接続している。そのため、ホールIC50a、50b、50c、50dが、マグネット16a、16b、16cから生じた磁束の方向の切り替わりを検出すると、図20に示されるように、制御部は、信号S1、S2、S3、S4を生成する。
As described above, the
すなわち、マグネット16bから生じた磁束を検出していたホールIC50a、50b、50c、50dが、マグネット16aから生じた磁束を検出すると、制御部は、信号S1、S2、S3,S4のレベルをハイに変化させる。また、マグネット16aから生じた磁束を検出していたホールIC50a、50b、50c、50dが、マグネット16bから生じた磁束を検出すると、制御部は、信号S1、S2、S3,S4のレベルをローに変化させる。
That is, when the
また、マグネット16aから生じた磁束を検出していたホールIC50b、50c、50dが、マグネット16cから生じた磁束を検出すると、制御部は、信号S2、S3,S4のレベルをローに変化させる。また、マグネット16cから生じた磁束を検出していたホールIC50b、50c、50dが、マグネット16aから生じた磁束を検出すると、制御部は、信号S2、S3,S4のレベルをハイに変化させる。
When the
しかしながら、ホールIC50aは、ロータ4の開口周縁部4cに近接した位置M1上に配置されるため、マグネット16a、16b、16cの一端から生じた磁束の方向の切り替わりを検出する。また、マグネット16cの一端に形成された磁極部160は、隣接するマグネット16aの磁極と同一のN極で着磁されている。マグネット16aから生じた磁束を検出していたホールIC50aが、マグネット16cから生じた磁束を検出しても、制御部は、信号S1のレベルを変化させない。同様にして、マグネット16cから生じた磁束を検出していたホールIC50aが、マグネット16aから生じた磁束を検出しても、制御部は、信号S1のレベルを変化させない。
However, since the
すなわち、マグネット16aから生じた磁束を検出していたホールIC50aが、マグネット16cから生じた磁束を検出するタイミングT1と、マグネット16cから生じた磁束を検出していたホールIC50aが、マグネット16aから生じた磁束を検出するタイミングT2との間において、制御部は、信号S1のレベルをローに変化させない。そして、制御部は、タイミングT1とタイミングT2の間で、信号S3のレベルをハイに変化させたタイミングT3に基づいて、エンジンを点火する。
That is, the
また、本実施の形態である始動発電機1は、三相交流式のブラシレスモータであるため、ホールIC50b、50c、50dは、各々、V相、W相、U相のコイル10と対応して配置される。そのため、制御部は、ホールIC50b、50c、50dがマグネット16の磁束の方向の切り替わりを検出すると、信号S2、S3,S4を生成し、V相、W相、U相のコイル10に対応させる。そして、制御部は、コイル10に対するロータ4の位置を検出し、所定のタイミングで、各相のコイル10へ電流を供給することにより、始動発電機1を駆動する。
In addition, since
また、本実施の形態において、基板34の略中央に形成された貫通孔37は、左右対称の円状に形成されている。しかしながら、図21に示されるように、貫通孔170の形状は、左右非対称の半円状に形成されても良い。このように構成することで、作業者は、基板34を裏返しにてベース部材42に組み付けることができなくなるため、センサユニット32は、効率よく生産される。
Further, in the present embodiment, the through
1 始動発電機
2 ステータコア
2a 本体部
2b ティース部
2c 貫通孔
3a、3b 先端部
3c 切り欠き部
4 ロータ
4a 内周面部
4b 底面部
4c 開口周縁部
4d エンボス
6 検出センサ
6a 内周面部
6b 外周面部
6d 底面部
10 コイル
12 ヨーク
12a 底面部
14 ボス部
16 マグネット
16a、16b、16c マグネット
18 マグネットカバー
32 センサユニット
34 基板
34a 内周部
34b 外周部
35a、35b、35c 貫通孔
36、37、38、39 貫通孔
42 ベース部材
44 本体部
45a、45b、45c、45d 切り欠き部
46a、46b、46c、46d ホルダ片
47a 基端部
47b 先端部
48a、48b、48c 溝部
49 固定部
50a、50b、50c、50d ホールIC
54a、54b、54c リード
60 センサケース
62 支持部
62a、62b 腕部
62c 連結部
64 支持部
66 センサユニット収容部
66a 開口周縁部
66c 底面部
68 ハウジング
68a 開口部(第1の開口部)
68b 開口部(第2の開口部)
68c ガイド部
68d 壁部
70 固定部
72 挿入部
72a 隆起部
72b 面取り部
73 リブ
74 台座部
80a、80b、80c、80d 脚部
82 基端部
84 中間部
84a リブ
86 先端部
86a 厚肉部
86b 薄肉部
88 凹部
88a 底面部
88b 開口部
90 凹部
90b 開口部
91a リブ
91b 溝
92a、92b 突出片
93 リブ
100a、100b リード線
101 接続部
102a、102b 保護チューブ
110 インシュレータ
112 壁部
114 ティース保持部
114a、114b 先端部
114c 本体部
114d 溝部
116 切り欠き部
120 端子
130 保持部材
132 螺子
140a、140b、140c、140d 受容部
160、162 磁極部
M1 ホールIC50aが配置された位置
M2 ホールIC50b、50c、50dが配置された位置
S1、S2、S3、S4 信号
Su、Sv、Sw 信号
DESCRIPTION OF
54a, 54b,
68b opening (second opening)
Claims (5)
The outer rotor type rotating electrical machine according to any one of claims 1 to 4, wherein the sensor case has a second fixing portion that is formed to protrude from a bottom surface of the sensor case, The outer rotor type rotating electrical machine, wherein the substrate is fixed to the sensor case by the second fixing portion.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009039983A JP2010200419A (en) | 2009-02-23 | 2009-02-23 | Outer rotor type rotating electric machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009039983A JP2010200419A (en) | 2009-02-23 | 2009-02-23 | Outer rotor type rotating electric machine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010200419A true JP2010200419A (en) | 2010-09-09 |
Family
ID=42824547
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009039983A Pending JP2010200419A (en) | 2009-02-23 | 2009-02-23 | Outer rotor type rotating electric machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010200419A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102545523A (en) * | 2012-01-20 | 2012-07-04 | 西南大学 | Sensor mounting assembly for brushless DC motor of motor-driven device |
| WO2020015360A1 (en) * | 2018-07-14 | 2020-01-23 | 中山大洋电机股份有限公司 | Dc brushless outer rotor motor |
-
2009
- 2009-02-23 JP JP2009039983A patent/JP2010200419A/en active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102545523A (en) * | 2012-01-20 | 2012-07-04 | 西南大学 | Sensor mounting assembly for brushless DC motor of motor-driven device |
| WO2020015360A1 (en) * | 2018-07-14 | 2020-01-23 | 中山大洋电机股份有限公司 | Dc brushless outer rotor motor |
| US11404940B2 (en) | 2018-07-14 | 2022-08-02 | Zhongshan Broad-Ocean Motor Co., Ltd. | Brushless direct current motor |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2010200421A (en) | Outer rotor type rotating electric machine | |
| JP5668182B1 (en) | Sensor and rotating electric machine using the same | |
| JP2010200418A (en) | Outer rotor type rotating electric machine | |
| JP5567377B2 (en) | Electric water pump | |
| JP6720032B2 (en) | Rotating electric machine | |
| JP5563805B2 (en) | Sensor case and rotating electric machine using the same | |
| JP2009089588A (en) | Starting generator | |
| JP2016077074A (en) | Position detection sensor and rotary electric machine | |
| CN108352757B (en) | Rotating electric machine for internal combustion engine | |
| JP2013233030A (en) | Starter generator | |
| JP2019097261A (en) | Brushless motor | |
| JP2010200417A (en) | Outer rotor type rotating electric machine | |
| JP5827034B2 (en) | Starting generator | |
| JP2010200420A (en) | Outer rotor type rotating electric machine | |
| JP6032340B2 (en) | Rotating electric machine for internal combustion engine | |
| JP2016077081A (en) | Rotary electric machine | |
| JP6058725B2 (en) | Starting generator | |
| JP2010200419A (en) | Outer rotor type rotating electric machine | |
| JP2007189841A (en) | Brushless motor | |
| JP5523058B2 (en) | Insulator for stator and rotating electric machine using the same | |
| CN103151895B (en) | Starter-generator | |
| JP2014068420A (en) | Mounting structure of sensor case for starter generator | |
| JP2019030143A (en) | Connector and motor with connector | |
| JP2019030141A (en) | Connector and motor with connector | |
| JP2019030144A (en) | Connector and motor with connector |