JP2010116165A - Vehicle control system and automobile using the system - Google Patents
Vehicle control system and automobile using the system Download PDFInfo
- Publication number
- JP2010116165A JP2010116165A JP2010048558A JP2010048558A JP2010116165A JP 2010116165 A JP2010116165 A JP 2010116165A JP 2010048558 A JP2010048558 A JP 2010048558A JP 2010048558 A JP2010048558 A JP 2010048558A JP 2010116165 A JP2010116165 A JP 2010116165A
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- control system
- vehicle control
- actuator driver
- driver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
Description
本発明は、自動車等の車両における制御システム及びこのシステムを用いた自動車に係り、特に、制御システムのコストの削減を図ることができる車両制御システム及びこのシステムを用いた自動車に関するものである。 The present invention relates to a control system in a vehicle such as an automobile and an automobile using the system, and more particularly to a vehicle control system capable of reducing the cost of the control system and an automobile using the system.
図11は、自動車等における従来の車両制御システムの構成図である。該車両制御システム60′は、中央制御装置(ECU)1′と、複数のセンサ2′と、複数のアクチュエータ3a′とから構成されており、車両のエンジンルーム内等に設けられたセンサ2′の各信号に基づき、車室内に設けられた中央制御装置1′にて所定の演算が行われ、アクチュエータ3a′を駆動する。
FIG. 11 is a configuration diagram of a conventional vehicle control system in an automobile or the like. The vehicle control system 60 'includes a central control unit (ECU) 1', a plurality of sensors 2 ', and a plurality of
前記中央制御装置1′は、入力インタフェース(入力I/F)11′と、演算処理部10′と、アクチュエータドライバ4′とから構成され、入力I/F11′がセンサ2′からの信号を加工して演算処理部10′に出力し、該演算処理部10′が所定の演算を行って最適な制御信号をアクチュエータドライバ4′に出力し、該アクチュエータドライバ4′が、コネクタ3b′を介して、負荷であるアクチュエータ3a′を駆動する。該アクチュエータドライバ4′は、中央制御装置1′の内部に集中して配置されている。
The central control unit 1 'includes an input interface (input I / F) 11', an arithmetic processing unit 10 ', and an actuator driver 4'. The input I / F 11 'processes a signal from the sensor 2'. Is output to the arithmetic processing unit 10 ', the arithmetic processing unit 10' performs a predetermined calculation and outputs an optimal control signal to the actuator driver 4 ', and the actuator driver 4' is connected via the
このような車両制御システムのうち、自動車のエンジン制御システムは、エンジン回転センサ,水温センサ、及び吸入空気量センサ等の各信号に基づき、中央制御装置であるエンジン制御ユニットにおいて演算処理部であるマイコンが所定の演算を行い、イグニッションコイルを駆動するドライバには、点火信号を出力し、インジェクタを駆動するドライバには、燃料噴射信号を出力し、各種バルブ及びリレースイッチを駆動するドライバには、開閉信号及び開弁量調節信号を出力することにより、エンジンを最適に制御するシステムである。 Among such vehicle control systems, an automobile engine control system is a microcomputer that is an arithmetic processing unit in an engine control unit that is a central controller based on signals from an engine rotation sensor, a water temperature sensor, an intake air amount sensor, and the like. Performs a predetermined calculation, outputs an ignition signal to a driver that drives an ignition coil, outputs a fuel injection signal to a driver that drives an injector, and opens and closes to a driver that drives various valves and relay switches. This system optimally controls the engine by outputting a signal and a valve opening amount adjustment signal.
ここで、図11の車両制御システム60′においては、アクチュエータドライバ4′は中央制御装置1′の内部に集中して配置されている。一方、アクチュエータドライバを中央制御装置の内部ではなく、駆動するアクチュエータに対応させて分散配置する公知例もあり、アクチュエータの汎用性を向上させるために、このようにして分散したアクチュエータドライバを、アクチュエータに接続されるコネクタに内蔵する車両用電子制御装置の通信用コネクタの技術が、特許文献1に開示されている。また、車両等における制御システムの他の従来技術としては、特許文献2等の技術が各種提案されている。
Here, in the
ところで、一般に、車両制御システムにおいて、アクチュエータドライバには、アクチュエータを駆動する際に比較的大きな電流(数アンペア程度)が流れる。アクチュエータドライバには、パワートランジスタ又はパワーMOSを用いることが多く、比較的大きな電流が流れることによって通電時のオン抵抗に起因するジュール熱が発生する。 In general, in a vehicle control system, a relatively large current (several amperes) flows through an actuator driver when the actuator is driven. The actuator driver often uses a power transistor or a power MOS, and a Joule heat is generated due to an on-resistance during energization when a relatively large current flows.
よって、図11の従来の車両制御システム60′のように、中央制御装置1′の内部にアクチュエータドライバ4′が一箇所に集中して配置される場合には、発熱部品であるアクチュエータドライバ4′によって中央制御装置1′全体の発熱量が増大し、制御に悪影響を及ぼし得るという問題がある。 Therefore, when the actuator driver 4 'is centrally arranged in the central controller 1' as in the conventional vehicle control system 60 'of FIG. 11, the actuator driver 4' that is a heat generating component is arranged. As a result, the amount of heat generated by the central control device 1 'as a whole increases, which can adversely affect the control.
特に、近年の自動車は、ハーネスコストや組み立て工数の削減を図るために、前記中央制御装置は、車両の車室内ではなく、エンジンルーム内に搭載される傾向にあり、該中央制御装置は、より一層厳しい温度環境下に曝されることから、これを避けるためには、放熱対策としてヒートシンクや放熱フィン等の放熱部品を設ける必要があり、製造コストひいては車両制御システム全体のコストが増加するという問題が生ずる。 In particular, in recent automobiles, in order to reduce harness costs and assembly man-hours, the central control device tends to be mounted not in the vehicle interior but in the engine room. In order to avoid this because it is exposed to a severer temperature environment, it is necessary to provide heat-dissipating parts such as heat sinks and heat-dissipating fins as a heat dissipating measure, which increases the manufacturing cost and thus the overall cost of the vehicle control system. Will occur.
この場合に、前記特開平8−79841号公報所載の制御システムのように、発熱部品であるアクチュエータドライバを、駆動するアクチュエータに対応させて該アクチュエータ側に分散配置することも考えられるが、単にアクチュエータドライバを分散配置させるだけでは十分ではない。なぜならば、現在のエンジン制御システムには、アクチュエータの断線又はショート等の故障を診断し、中央制御装置の演算処理部にその状況を知らせるための自己診断機能、このような故障時に過電流及び過熱によるアクチュエータドライバの故障を防止するための自己保護機能のほか、シリアル通信線を介した多重通信システムにおいて、分散配置したアクチュエータをPWM(Pulse Width Modulation)制御する際のタイマ回路等が必須の構成になるからである。 In this case, as in the control system described in the above-mentioned JP-A-8-79841, it is possible to disperse the actuator drivers, which are heat-generating components, on the actuator side in correspondence with the actuators to be driven. It is not sufficient to distribute actuator drivers in a distributed manner. This is because the current engine control system has a self-diagnostic function for diagnosing faults such as disconnection or short-circuiting of the actuator and notifying the operation processing unit of the central control unit, and overcurrent and overheat in such a fault. In addition to the self-protection function to prevent actuator driver failure due to, the timer circuit for PWM (Pulse Width Modulation) control of actuators distributed in a multiplex communication system via serial communication lines is essential. Because it becomes.
すなわち、本発明者は、中央制御装置と、複数のアクチュエータとを備えた車両制御システムにおいては、車両制御システムのコストの削減を図るために、アクチュエータドライバは、前記アクチュエータ側に分散配置させるとともに、分散配置してもシステムの信頼性・機能性を保つために、自己診断部,自己保護部、及び通信制御部等を備えて自己独立させる必要があるとの新たな知見を得たが、前記従来の技術は、前記アクチュエータドライバが、中央制御装置の内部から離れて各アクチュエータ側に対して分散配置されていない、若しくは前記アクチュエータドライバが、中央制御装置の外部に出しても、放熱を容易にするために分散配置されるものではなく、しかも、実際のシステム構築が可能な自己独立したドライバではなく、中央制御装置内の発熱を低減させることによる車両制御システムの放熱部品コスト削減及び前記アクチュエータドライバを分散配置しても制御システムの信頼性・機能性等を維持する点については、いずれも格別の配慮がなされていない。 That is, the present inventor, in a vehicle control system provided with a central control device and a plurality of actuators, in order to reduce the cost of the vehicle control system, actuator drivers are distributed on the actuator side, In order to maintain the reliability and functionality of the system even in a distributed arrangement, we obtained new knowledge that it is necessary to have a self-diagnosis unit, a self-protection unit, a communication control unit, etc. In the prior art, the actuator driver is not dispersedly arranged with respect to each actuator side away from the inside of the central control device, or even if the actuator driver goes out of the central control device, heat dissipation is easy. Is not a distributed driver, and is not a self-independent driver that can build an actual system. Special consideration is given to reducing the cost of heat dissipating parts of the vehicle control system by reducing heat generation in the central control unit and maintaining the reliability and functionality of the control system even if the actuator drivers are distributed. Has not been made.
本発明は、このような問題に鑑みてなされたものであって、その目的とするところは、アクチュエータドライバを分散配置させて中央制御装置内の発熱の抑制化を行って制御システムのコストの削減を図るとともに、アクチュエータドライバを自己独立させて、アクチュエータドライバを分散配置しても制御システムの信頼性及び機能性を保つことができる車両制御システム及び該システムを用いた自動車を提供することである。 The present invention has been made in view of such a problem, and an object of the present invention is to reduce the cost of the control system by suppressing the heat generation in the central control device by distributing actuator drivers in a distributed manner. It is another object of the present invention to provide a vehicle control system capable of maintaining the reliability and functionality of the control system even when the actuator drivers are distributed and arranged, and an automobile using the system.
前記目的を達成すべく、本発明に係る車両制御システムは、基本的には、中央制御装置と、複数のアクチュエータとを備えた車両制御システムであって、該制御システムは、前記アクチュエータ側に、該アクチュエータを駆動するアクチュエータドライバを備え、該アクチュエータドライバは、自己診断部,自己保護部、及び通信制御部を有して自己独立されるとともに、前記各アクチュエータに対応させて分散配置されることを特徴としている。 In order to achieve the above object, a vehicle control system according to the present invention is basically a vehicle control system including a central control device and a plurality of actuators, and the control system is arranged on the actuator side. An actuator driver for driving the actuator, and the actuator driver has a self-diagnosis unit, a self-protection unit, and a communication control unit, and is self-independent and distributedly arranged corresponding to each actuator. It is a feature.
前記の如く構成された本発明の車両制御システムは、アクチュエータドライバが、中央制御装置から離れてアクチュエータ側に配置されるとともに、該複数のアクチュエータに対応して分散されているので、中央制御装置内の発熱を抑制化を行って制御システムのコストの削減を図ることができ、しかも、アクチュエータドライバが、システムとして自己独立されているので、アクチュエータドライバを分散配置しても制御システムの信頼性及び機能性を保つことができる。 In the vehicle control system of the present invention configured as described above, the actuator driver is disposed on the actuator side away from the central control device and is distributed corresponding to the plurality of actuators. The control system cost can be reduced by suppressing the heat generation of the actuator, and since the actuator driver is self-independent as a system, the reliability and function of the control system can be achieved even if the actuator drivers are distributed. Can keep sex.
また、本発明に係る車両制御システムの具体的態様は、前記アクチュエータドライバは、タイマ部を有していることを特徴としている。 A specific aspect of the vehicle control system according to the present invention is characterized in that the actuator driver includes a timer unit.
さらに、本発明に係る車両制御システムの他の具体的態様は、前記アクチュエータドライバは、前記アクチュエータに接続されるコネクタ若しくはアダプタに内蔵されること、前記アクチュエータドライバは、前記アクチュエータに接続されるコネクタ若しくはアダプタの外面に着脱可能に搭載され、該コネクタ若しくはアダプタの端子と電気的に接続されること、又は前記アクチュエータドライバは、前記アクチュエータに内蔵されることを特徴としている。 Furthermore, in another specific aspect of the vehicle control system according to the present invention, the actuator driver is built in a connector or an adapter connected to the actuator, and the actuator driver is a connector connected to the actuator or It is detachably mounted on the outer surface of the adapter, and is electrically connected to the connector or a terminal of the adapter, or the actuator driver is built in the actuator.
さらにまた、本発明に係る車両制御システムの他の具体的態様は、前記アクチュエータドライバの通信制御部は、シリアル通信制御部を有すること、又は無線通信制御部を有することを特徴としている。 Furthermore, another specific aspect of the vehicle control system according to the present invention is characterized in that the communication control unit of the actuator driver includes a serial communication control unit or a wireless communication control unit.
また、前記アクチュエータドライバは、半導体基板上に作製され、ICとされること、又は前記アクチュエータドライバは、基板を介さずに金属部材上に直接に搭載され、モールド実装によって、前記アクチュエータに接続されるコネクタ若しくはアダプタと一体に成形、或いは前記アクチュエータと一体に成形されることを特徴としている。 In addition, the actuator driver is manufactured on a semiconductor substrate to be an IC, or the actuator driver is directly mounted on a metal member without a substrate, and is connected to the actuator by mold mounting. It is formed integrally with a connector or an adapter, or formed integrally with the actuator.
さらに、前記中央制御装置は、車両のエンジンルーム内に搭載されていること、又は前記車両制御システムを用いた自動車であることを特徴としている。 Further, the central control device is mounted in an engine room of a vehicle or is an automobile using the vehicle control system.
本発明に係る車両制御システムは、アクチュエータドライバが、アクチュエータ側に分散配置されるとともに、自己独立されているので、中央制御装置内の発熱を抑制化を行って制御システムのコストの削減を図るとともに、分散配置しても制御システムの信頼性及び機能性を保つことができる。 In the vehicle control system according to the present invention, since the actuator drivers are distributed on the actuator side and are independent of each other, the heat generation in the central control device is suppressed to reduce the cost of the control system. Even in a distributed arrangement, the reliability and functionality of the control system can be maintained.
また、以上のような車両制御システムを用いることにより、低コストの自動車を生産することができる。 Further, by using the vehicle control system as described above, a low-cost automobile can be produced.
以下、図面に基づき本発明の車両制御システムの実施形態について説明する。
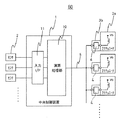
図1乃至図4は第一の実施形態の車両制御システムを示しており、図1は、前記車両制御システムの構成図を示したものである。
Hereinafter, an embodiment of a vehicle control system of the present invention will be described with reference to the drawings.
1 to 4 show a vehicle control system according to the first embodiment, and FIG. 1 shows a configuration diagram of the vehicle control system.
該車両制御システム60は、中央制御装置(ECU)1と、複数のセンサ2と、複数のアクチュエータ3aと、複数のアクチュエータドライバ4とから構成されており、車両のエンジンルーム内等に設けられたセンサ2の各信号に基づき、該エンジンルーム内に搭載された中央制御装置1にて所定の演算が行われ、アクチュエータドライバ4を介して、負荷であるアクチュエータ3aを駆動する。
The
前記中央制御装置1は、入力インタフェース(入力I/F)11と、演算処理部10とから構成される。アクチュエータ3aは、アクチュエータドライバ4によって駆動されており、該アクチュエータドライバ4は、中央制御装置1から離れて前記アクチュエータ3a側に設けられるとともに、該複数のアクチュエータ3aに対応させてそれぞれ分散して配置されている。
The
アクチュエータドライバ4は、後述するように、アクチュエータ3aに接続されるコネクタ3bに内蔵され、中央制御装置1の演算処理部10と一本のシリアル通信線5で結ばれている。そして、演算処理部10が、センサ2の信号を加工した入力I/F11からの信号を取り込み、演算処理部10であるマイコンが所定の演算を行って最適な制御信号をアクチュエータドライバ4に出力し、該アクチュエータドライバ4がアクチュエータ3aを駆動している。
As will be described later, the
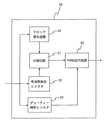
図2は、アクチュエータドライバ4の回路ブロック図である。
該アクチュエータドライバ4は、自己診断部及び自己保護部,タイマ部,通信制御部を有しており、中央制御装置1の外部に出しても実際のシステム構築を可能するべく自己独立されている。すなわち、コネクタ3bに内蔵されたアクチュエータドライバ4は、図示のように、N型パワーMOSトランジスタ20と、ツェナーダイオード21と、自己診断部として、負荷断線又はドレインDのグランド短絡診断回路23、過電流又はドレインDの電源短絡診断回路24,過熱診断回路25と、診断出力制御回路26と、自己保護部としてゲート保護回路22と、通信制御部としてシリアル通信制御部27と、タイマ部としてタイマ回路28をそれぞれ内蔵している。
FIG. 2 is a circuit block diagram of the
The
N型パワーMOSトランジスタ20は、パワー半導体プロセスを用いて作られたものであり、該トランジスタ20のゲートGを制御することによってトランジスタ20のオン/オフを行い、ドレインDに接続された負荷3aaを駆動する。 The N-type power MOS transistor 20 is manufactured using a power semiconductor process, and the transistor 20 is turned on / off by controlling the gate G of the transistor 20, and the load 3aa connected to the drain D is connected. To drive.
ツェナーダイオード21は、ドレインDとゲートGの間に設けられ、ドレインDに誘導性負荷が接続された場合には、ゲートGのオフ時の逆起電圧によってMOSトランジスタ20の破壊を防止している。
The
前記自己診断部としての負荷断線又はドレインDのグランド短絡診断回路23、過電流又はドレインDの電源短絡診断回路24,過熱診断回路25の自己診断回路は、各回路に応じた異常状態を検出したときには、診断出力制御回路26に出力し、該診断出力制御回路26は、各異常状態に応じた信号をシリアル通信制御部27を介して中央制御装置1に出力する。
The load disconnection or drain D ground short
また、前記自己診断部は、過熱を検出したとき又は過電流/電源短絡を検出したときには、自己保護部であるゲート保護回路22に各異常検出信号を伝えることにより、MOSトランジスタ20をオフにし、該トランジスタ20の破壊を防止している。
The self-diagnosis unit turns off the MOS transistor 20 by transmitting each abnormality detection signal to the
シリアル通信制御部27は、中央制御装置1との間でシリアル通信を行うものであり、シリアル通信のプロトコルに従って信号送受信タイミングを制御するコントローラと、この制御に応じて信号の送受信を行うトランシーバとから構成され、中央制御装置1から前記各アクチュエータ3aの駆動制御信号を受信する一方で、診断出力制御回路26からの診断信号を中央制御装置1に送信する。なお、中央制御装置1側の演算処理部10には、前記シリアル通信制御部27と同様のシリアル通信制御部(図示省略)が内蔵されている。
The serial
タイマ回路28は、リレースイッチのみならず、PWM(Pulse Width Modulation)駆動及びパルス駆動を必要とするアクチュエータをも駆動できるようにするものである。すなわち、アクチュエータ3aには、前記リレースイッチのように単にオン/オフ制御を行うもののほか、各種バルブの開弁量調節に使われる比例ソレノイドのようにPWM駆動を要するもの、及びインジェクタのようにパルス駆動を要するもの等があり、一本のシリアル通信線5を用い、時分割で様々な種類のアクチュエータ3aの駆動信号を送信する場合、例えば、PWM信号を特定のアクチュエータドライバ4に常時送信することは困難である。よって、本実施形態のアクチュエータドライバ4は、リレースイッチのほか、PWM駆動及びパルス駆動を必要とするアクチュエータをも駆動できるようにされている。
The
図3は、アクチュエータ3aとシリアル通信線5との関係を示したものである。
アクチュエータ3aに接続されるコネクタ3bは、図示のように、アクチュエータドライバ4と中央制御装置1の演算処理部10との間を結ぶシリアル通信線5と、車両のバッテリーとを結ぶ電源線9a,9bとの各先端に設けられたコネクタであり、分散配置されたアクチュエータドライバ4は、アクチュエータ3aに接続されるコネクタ3bに内蔵されている。
FIG. 3 shows the relationship between the
As shown in the figure, the
このように、シリアル通信線5によって多重通信する本実施形態の構成は、中央制御装置1′とアクチュエータドライバ4′との間を個別に接続する構成(図11参照)に比べて省配線化が図られている。なお、アクチュエータドライバ4の電源は、電源線9a,9bに限られず、アクチュエータ3a側から供給するものであっても良い。
As described above, the configuration of the present embodiment in which multiplex communication is performed by the
図4は、タイマ回路28の回路ブロック図を示したものである。
タイマ回路28は、クロック発生回路30、このクロックを分周する分周回路31,周波数設定レジスタ32,デューティー設定レジスタ33,PWM出力回路34から構成される。
FIG. 4 is a circuit block diagram of the
The
上記したように、多重通信システムにおいてアクチュエータのPWM駆動を行う場合には、まず、中央制御装置1が、シリアル通信線5を介して、アクチュエータドライバ4に対するPWMの周波数設定信号とデューティー設定信号とをタイマ回路28に送信する。これらの信号は、それぞれ周波数設定レジスタ32,デューティー設定レジスタ33に格納され、周波数設定レジスタ32によって内部クロックを所定のPWM周波数まで分周し、デューティー設定レジスタ33によって、この分周信号を所望のデューティーを有するPWM信号に変調する。これにより、ソレノイドに流す電流を変化させてバルブの開弁量を変化させたいときには、中央制御装置1からデューティー設定信号を送るだけで、アクチュエータドライバ4自体が、その信号に応じて前記ソレノイドへの通電量を制御することができる。
As described above, when performing PWM driving of an actuator in a multiplex communication system, first, the
また、クロック発生回路30は、中央制御装置1から送られる波形パターンによって発振周波数を随時自己補正できるようになっており、水晶発振子を不要にして、安価な回路として実現されている。
Further, the
なお、十分に高速な信号伝送速度を有するシリアル通信システムを用いる場合には、前記インジェクタのように燃料噴射タイミングを正確に制御する必要があるアクチュエータ3aに対しても、タイマ回路28を内蔵するアクチュエータドライバ4を用いて時分割で制御することができる。また、信号伝送速度が遅いときには、前記タイミングを正確に制御しなければならないアクチュエータ3aだけは、中央制御装置1から専用の通信線を介して制御する。
When a serial communication system having a sufficiently high signal transmission speed is used, an actuator having a built-in
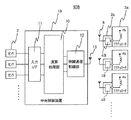
図5は、第二の実施形態の車両制御システムの構成図を示したものである。
該車両制御システム60Aは、中央制御装置(ECU)1Aの演算処理部10とアクチュエータドライバ4Aとの信号線の構成を除き、前記第一の実施形態の車両制御システム60の構成と同様であることから、以下、この相違点を中心に説明する。
FIG. 5 shows a configuration diagram of the vehicle control system of the second embodiment.
The
車両制御システム60Aのアクチュエータドライバ4Aは、中央制御装置1Aから離れて前記アクチュエータ3a側に設けられるとともに、該複数のアクチュエータ3aに対応させてそれぞれ分散してコネクタ3b内に配置されている。さらに、該アクチュエータドライバ4Aは、自己診断部及び自己保護部,通信制御部を有しており、中央制御装置1Aの外部に出しても実際のシステム構築を可能するべく自己独立されている。
The actuator driver 4A of the
そして、中央制御装置1Aの演算処理部10とアクチュエータドライバ4Aとの間は、シリアル通信線5とパラレル通信線6とによって結ばれており、センサ2の各信号に基づいて中央制御装置1Aにて所定の演算が行われ、中央制御装置1Aからアクチュエータドライバ4Aへの制御信号は、パラレル通信線6により、アクチュエータドライバ4A毎に送信し、アクチュエータ3aを駆動する。一方、アクチュエータドライバ4Aから中央制御装置1Aへのアクチュエータ3aの診断信号だけはシリアル通信線5により束になって中央制御装置1Aに送信されている。なお、この構成により、本実施形態のアクチュエータドライバ4Aは、必ずしも前記タイマ回路28を内蔵していなくても良い。
The
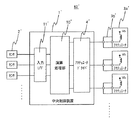
図6及び図7は第三の実施形態の車両制御システムを示しており、図6は、前記車両制御システムの構成図を示したものである。
該車両制御システム60Bは、中央制御装置(ECU)1Bの演算処理部10とアクチュエータドライバ4Bとの信号送受信の構成を除き、前記第一及び第二の実施形態の車両制御システムの構成と同様であることから、以下、この相違点を中心に説明する。
6 and 7 show a vehicle control system according to a third embodiment, and FIG. 6 shows a configuration diagram of the vehicle control system.
The vehicle control system 60B is the same as the configuration of the vehicle control system of the first and second embodiments except for the configuration of signal transmission / reception between the
車両制御システム60Bのアクチュエータドライバ4Bは、中央制御装置1Bから離れて前記アクチュエータ3a側に設けられるとともに、該複数のアクチュエータ3aに対応させてそれぞれ分散してコネクタ3b内に配置されている。さらに、該アクチュエータドライバ4Bは、自己診断部及び自己保護部,タイマ部,無線通信制御部,アンテナを有しており、中央制御装置1Bの外部に出しても実際のシステム構築を可能するべく自己独立されている。
The
そして、中央制御装置1Bの演算処理部10とアクチュエータドライバ4Bとの間は、無線によって信号の通信が行われている。すなわち、前記中央制御装置1Bは、入力インタフェース(入力I/F)11と、演算処理部10と、無線通信制御部12と、アンテナ13とから構成され、演算処理部10が、センサ2の信号を加工した入力I/F11からの信号を取り込み、所定の演算を行って最適な制御信号を無線通信制御部12及びアンテナ13を介してアクチュエータドライバ4に出力し、該アクチュエータドライバ4Bがアンテナ8等を介して前記信号を受信してアクチュエータ3aを駆動している。
Signal communication is performed wirelessly between the
また、該アクチュエータドライバ4Bは、図7に示すように、N型パワーMOSトランジスタ20と、ツェナーダイオード21と、自己診断部として、負荷断線又はドレインDのグランド短絡診断回路23、過電流又はドレインDの電源短絡診断回路24、過熱診断回路25と、診断出力制御回路26と、自己保護部としてゲート保護回路22と、通信制御部として無線通信制御部29、アンテナ8と、タイマ部としてタイマ回路28を内蔵している。そして、前記自己診断部としての負荷断線又はドレインDのグランド短絡診断回路23、過電流又はドレインDの電源短絡診断回路24、過熱診断回路25の自己診断回路は、各回路に応じた異常状態を検出したときには、診断出力制御回路26に出力し、該診断出力制御回路26は、各異常状態に応じた信号を無線通信制御部29を介して中央制御装置1に出力する。
Further, as shown in FIG. 7, the
なお、タイマ回路28は、前述したように、時分割により多重通信を行うときには必須であるが、周波数の異なる別々の無線通信回線を使って、中央制御装置1Bと各々のアクチュエータドライバ4B間とを個別に通信する場合には必ずしも必要ではない。
As described above, the
図8は、前記自己独立したアクチュエータドライバ4を、駆動するアクチュエータ3aに対応させて分散配置させた前記第一の実施形態の車両制御システム60を用いた自動車50を示したものである。
FIG. 8 shows an
該自動車50において、中央制御装置1であるエンジン制御ユニットは、ハーネスコストや自動車組み立て工数削減のために、車室52内ではなく、より一層温度環境の厳しいエンジンルーム51内に搭載されており、エンジン回転センサ,水温センサ,吸入空気量センサ等の各種センサ2の出力信号に基づき、中央制御装置1の演算処理部10が各種演算を行い、イグニッションコイル,インジェクタ、及び各種バルブを駆動するアクチュエータドライバ4にシリアル通信線5を介して駆動信号を出力し、エンジンの最適制御を行っている。なお、前記第二及び第三の実施形態の車両制御システム60A,60Bを用いた自動車であっても良く、この場合にも前記と同様にエンジンの最適制御を行うことができる。
In the
以上のように、本発明の前記実施形態は、上記の構成によって次の機能を奏するものである。 As described above, the embodiment of the present invention exhibits the following functions by the above configuration.
すなわち、第一乃至及び第三の実施形態の車両制御システム60,60A,60Bは、アクチュエータドライバ4,4A,4Bが、中央制御装置1,1A,1Bから離れて配置されることにより、該中央制御装置1,1A,1B内の発熱を抑制できるため、該中央制御装置1,1A,1Bには、ヒートシンクや放熱フィン等の放熱部品が不要になり、中央制御装置のコストの削減を図ることができる。
That is, in the
このことは、中央制御装置に対する温度環境の仕様が特に厳しい自動車において、より大きな効果を発揮することができる。 This can exert a greater effect in an automobile in which the specification of the temperature environment for the central control device is particularly strict.
また、発熱量の大きいアクチュエータドライバ4,4A,4Bが、自身が駆動する各アクチュエータ3a毎に対応して分散されているので、アクチュエータドライバ4,4A,4Bの個々の発熱量は比較的少なくなり、アクチュエータ3a側でのアクチュエータドライバの放熱対策を容易にすることができるとともに、中央制御装置1,1A,1Bを小型化でき、さらに、システムによって異なるアクチュエータを使う場合でも中央制御装置は同一のもので良いため、中央制御装置1,1A,1Bの汎用性を向上させることができる。
Further, since the
また、アクチュエータドライバ4,4A,4Bをアクチュエータ3a側に配置したことで、中央制御装置1,1A,1Bとアクチュエータ3aとの間の信号線に大電流が流れることがなくなるため、車両制御システム60,60A,60Bからの輻射ノイズの低減を図ることもできる。
Since the
そして、自己診断・自己保護機能等を備え、中央制御装置の外部に出しても実際のシステム構築が可能な自己独立したアクチュエータドライバ4,4A,4Bを用いることにより、アクチュエータドライバ分散型のシステムを確実に構築することができ、アクチュエータドライバを分散しても車両制御システム60,60A,60Bの信頼性及び機能性を保つことができる。
And by using self-
また、個々のアクチュエータドライバ4,4A,4Bの占める面積は、自己診断・自己保護機能,タイマ回路,通信制御部等を内蔵しても比較的小さくて済むことから、分散配置されたアクチュエータドライバ4,4A,4Bのサイズが変化することもなく、中央制御装置の小型化の分、車両制御システム全体のコスト低減,小型化を実現することができる。
Further, since the area occupied by the
さらに、アクチュエータドライバ4,4A,4Bは、コネクタ3bに内蔵されており、アクチュエータドライバ4,4A,4Bをアクチュエータ3aと別体で構成させることによって、異なるシステムに対してもアクチュエータ3aを共用でき、該アクチュエータ3aの汎用性を向上させることができる。
Furthermore, the
しかも、アクチュエータ3aには種々の形状のものがあることを鑑みると、一品種ごとにハウジング構造を変えてドライバ4を内蔵するよりも、構造が比較的単純でバリエーションも少ないコネクタ3b側にドライバ4を内蔵する方が生産性に優れるともいえる。さらに、一般に、アクチュエータ3aに内蔵するよりもコネクタ3bに内蔵する方がアクチュエータドライバ4の周囲の温度は低く、放熱対策がより容易になるとも考えられる。
Moreover, in view of the fact that there are actuators of various shapes, the
また、第一の実施形態の車両制御システム60は、シリアル通信によるアクチュエータドライバ分散型システムであり、省配線化を行っているため、配線コスト,配線重量、及び車体組み立て工数の削減を図ることができる。さらに、第二の実施形態の車両制御システム60Aは、シリアル通信線5及びパラレル通信線6によるアクチュエータドライバ分散型システムであり、リアルタイムの処理が要求される場合にも充分に対応させることができる。さらにまた、第三の実施形態の車両制御システム60Bは、無線通信によるアクチュエータドライバ分散型システムであり、信号線を削減でき、車両制御システムの一層の低コスト化を図ることができる。
The
そして、前記車両制御システム60,60A,60Bを用いた自動車50は、エンジンルーム内51が車室内52に比べて高温になるものの、発熱部品であるアクチュエータドライバ4,4A,4Bを分散させることで、放熱対策が容易になるとともに、中央制御装置1,1A,1Bの汎用性も増すため、低コストの自動車を生産することが可能になる。
In the
以上、本発明の三つの実施形態について詳述したが、本発明は前記実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の精神を逸脱することなく設計において種々の変更ができるものである。 Although three embodiments of the present invention have been described in detail above, the present invention is not limited to the above-described embodiments, and various designs can be used without departing from the spirit of the present invention described in the claims. It can be changed.
例えば、前記各実施形態では、アクチュエータドライバ4,4A,4Bは、コネクタ3bに内蔵されているが、この構成に限られることなく、アクチュエータドライバ4,4A,4Bが、アクチュエータ3aに接続されるアダプタに内蔵されるものであっても良く、この場合には、前記アダプタを既存のアクチュエータ3aに接続するだけで制御システムを構築することができ、システムの生産性の向上を図ることができる。また、アクチュエータドライバ4,4A,4Bが、アクチュエータ3aに内蔵されるものであっても良く、この場合にも同様の効果を得ることができる。
For example, in each of the embodiments described above, the
また、アクチュエータドライバ4,4A,4Bは、コネクタ3b等に内蔵されるものに限られず、前記アクチュエータ3aに接続されるコネクタ3b又は前記アダプタの外面に着脱可能に搭載され、該コネクタ3b又は前記アダプタの端子と電気的に接続されていても良い。
The
図9は、分散したアクチュエータドライバ4をコネクタ3bの外面に着脱可能に搭載した状態を示す断面図であり、コネクタ端子42には、中央制御装置1からの信号線5又は信号線6が接続され、コネクタ端子43には、アクチュエータ3a側のコネクタが接続される。
FIG. 9 is a cross-sectional view showing a state in which the distributed
そして、該コネクタ端子42,43は、コネクタ3bの上面に突出しており、これに自己診断部等を備えたアクチュエータドライバ4を嵌合させることによって、アクチュエータドライバ4とコネクタの端子42,43とを電気的・機械的に接続する。このように、アクチュエータドライバ4をコネクタ3bの外面に着脱可能に搭載させることによって、アクチュエータドライバ4の変更等の際には、コネクタ3bを変更することなく、アクチュエータドライバ4のみの交換で済むことから、生産性及びメンテナンス性に優れるという効果がある。
The
図10は、アクチュエータドライバ4をコネクタ3bに内蔵させた場合の実装形態を示しており、リードフレームを用いたドライバ内蔵コネクタの断面図である。
コネクタ端子42には、中央制御装置1からの信号線5又は信号線6が接続され、コネクタ端子43には、アクチュエータ3a側のコネクタが接続される。
FIG. 10 shows a mounting form when the
The
そして、自己診断部等を備えたアクチュエータドライバ4は、バイポーラプロセス,パワー半導体プロセス(DMOSプロセス),CMOSプロセスを融合したBCDプロセス等を用いて半導体基板たるシリコンウェハ上に作製したワンチップIC、或いは数個のICから構成されるマルチチップのICである。
The
このICは、基板を介さずにリードフレームの金属部材(金属ベース)40の上に導電性接着剤等で接着することにより搭載する。ドライバ4であるICとコネクタ端子42,43の間は、アルミ線又は金線41でワイヤーボンディングし、その後、樹脂44を用いて全体をトランスファーモールドすることによってドライバ内蔵コネクタ3bを一体に成形する。
This IC is mounted by adhering onto a metal member (metal base) 40 of the lead frame without using a substrate with a conductive adhesive or the like. Between the IC which is the
この金属ベース40は、コネクタ3bの外部側に向けて露出されており、ドライバ4であるICの放熱板としても機能し、モールド実装することによって放熱性が悪化することはないものである。また、アクチュエータドライバ4とコネクタ3bとをトランスファーモールド実装で一体に成形することにより、製造工程の短縮化を行ってドライバ内蔵コネクタ3bを低コストで実現することができる。なお、該アクチュエータドライバ4は、前記アダプタと一体に成形、或いは前記アクチュエータと一体に成形しても良いものである。
The
1,1A,1B 中央制御装置(ECU)
3a アクチュエータ
3b コネクタ
4,4A,4B アクチュエータドライバ
22 ゲート保護回路(自己保護部)
23 負荷断線又はドレインのグランド短絡診断回路(自己診断部)
24 過電流又はドレインの電源短絡診断回路(自己診断部)
25 過熱診断回路(自己診断部)
26 診断出力制御回路(自己診断部)
27 シリアル通信制御部(通信制御部)
28 タイマ回路(タイマ部)
29 無線通信制御部(通信制御部)
40 金属部材
42,43 コネクタ端子
50 自動車
51 エンジンルーム
60,60A,60B 車両制御システム
1, 1A, 1B Central control unit (ECU)
23 Load disconnection or drain ground short circuit diagnosis circuit (self-diagnosis unit)
24 Overcurrent or drain power supply short circuit diagnosis circuit (self-diagnosis unit)
25 Overheat diagnosis circuit (self-diagnosis unit)
26 Diagnostic output control circuit (Self-diagnosis unit)
27 Serial communication control unit (communication control unit)
28 Timer circuit (Timer part)
29 Wireless communication control unit (communication control unit)
40
Claims (11)
システムは、前記アクチュエータ側に、該アクチュエータを駆動するアクチュエータドラ
イバを備え、該アクチュエータドライバは、自己診断部,自己保護部、及び通信制御部を
有して自己独立されるとともに、前記各アクチュエータに対応させて分散配置されること
を特徴とする車両制御システム。 In a vehicle control system including a central control device and a plurality of actuators, the control system includes an actuator driver that drives the actuator on the actuator side. The actuator driver includes a self-diagnosis unit, a self-protection unit, And a vehicle control system comprising a communication control unit and being self-independent and being distributed in correspondence with the actuators.
の車両制御システム。 The vehicle control system according to claim 1, wherein the actuator driver includes a timer unit.
タに内蔵されることを特徴とする請求項1又は2記載の車両制御システム。 The vehicle control system according to claim 1, wherein the actuator driver is built in a connector or an adapter connected to the actuator.
タの外面に着脱可能に搭載され、該コネクタ又はアダプタの端子と電気的に接続されるこ
とを特徴とする請求項1又は2記載の車両制御システム。 3. The vehicle control according to claim 1, wherein the actuator driver is detachably mounted on an outer surface of a connector or adapter connected to the actuator, and is electrically connected to a terminal of the connector or adapter. system.
求項1又は2記載の車両制御システム。 The vehicle control system according to claim 1, wherein the actuator driver is built in the actuator.
とする請求項1乃至5のいずれか一項に記載の車両制御システム。 The vehicle control system according to claim 1, wherein the communication control unit of the actuator driver includes a serial communication control unit.
る請求項1乃至5のいずれか一項に記載の車両制御システム。 The vehicle control system according to claim 1, wherein the communication control unit of the actuator driver includes a wireless communication control unit.
する請求項1乃至7のいずれか一項に記載の車両制御システム。 The vehicle control system according to claim 1, wherein the actuator driver is manufactured on a semiconductor substrate and is an IC.
ド実装によって、前記アクチュエータに接続されるコネクタ又はアダプタと一体に成形、
或いは前記アクチュエータと一体に成形されることを特徴とする請求項3又は5記載の車
両制御システム。 The actuator driver is mounted directly on a metal member without a substrate, and is molded integrally with a connector or adapter connected to the actuator by mold mounting.
6. The vehicle control system according to claim 3, wherein the vehicle control system is formed integrally with the actuator.
1乃至9のいずれか一項に記載の車両制御システム。 The vehicle control system according to claim 1, wherein the central control device is mounted in an engine room of the vehicle.
自動車。 An automobile using the vehicle control system according to any one of claims 1 to 10.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010048558A JP2010116165A (en) | 2010-03-05 | 2010-03-05 | Vehicle control system and automobile using the system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010048558A JP2010116165A (en) | 2010-03-05 | 2010-03-05 | Vehicle control system and automobile using the system |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008301528A Division JP2009040424A (en) | 2008-11-26 | 2008-11-26 | Actuator device of vehicle control system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010116165A true JP2010116165A (en) | 2010-05-27 |
| JP2010116165A5 JP2010116165A5 (en) | 2010-08-26 |
Family
ID=42304083
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010048558A Pending JP2010116165A (en) | 2010-03-05 | 2010-03-05 | Vehicle control system and automobile using the system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010116165A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014080722A1 (en) * | 2012-11-26 | 2014-05-30 | 日立オートモティブシステムズ株式会社 | Control device |
| JP2014151689A (en) * | 2013-02-06 | 2014-08-25 | Yazaki Corp | Relay connector unit and electronic device control system provided therewith |
| WO2014132740A1 (en) * | 2013-02-27 | 2014-09-04 | 日立オートモティブシステムズ株式会社 | Vehicle control device |
| JP2020158055A (en) * | 2019-03-28 | 2020-10-01 | 矢崎総業株式会社 | Wiring harness, and safety management system |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03239646A (en) * | 1990-02-15 | 1991-10-25 | Hitachi Ltd | Coordinative control device |
| JPH04138948A (en) * | 1990-09-28 | 1992-05-13 | Fujikura Ltd | Drive control device for load |
| JPH04306029A (en) * | 1991-04-02 | 1992-10-28 | Fanuc Ltd | Method for locating a fault device in simplex communication |
| JPH07310587A (en) * | 1994-05-18 | 1995-11-28 | Nippondenso Co Ltd | Controller for internal combustion engine in vehicle |
| JPH10132970A (en) * | 1996-10-30 | 1998-05-22 | Seiko Epson Corp | Display device and electronic equipment |
| JPH11266287A (en) * | 1997-12-04 | 1999-09-28 | Olympus Optical Co Ltd | Distributed control system |
| JP2000092083A (en) * | 1998-09-17 | 2000-03-31 | Nissan Motor Co Ltd | On-vehicle electronic controller |
-
2010
- 2010-03-05 JP JP2010048558A patent/JP2010116165A/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03239646A (en) * | 1990-02-15 | 1991-10-25 | Hitachi Ltd | Coordinative control device |
| JPH04138948A (en) * | 1990-09-28 | 1992-05-13 | Fujikura Ltd | Drive control device for load |
| JPH04306029A (en) * | 1991-04-02 | 1992-10-28 | Fanuc Ltd | Method for locating a fault device in simplex communication |
| JPH07310587A (en) * | 1994-05-18 | 1995-11-28 | Nippondenso Co Ltd | Controller for internal combustion engine in vehicle |
| JPH10132970A (en) * | 1996-10-30 | 1998-05-22 | Seiko Epson Corp | Display device and electronic equipment |
| JPH11266287A (en) * | 1997-12-04 | 1999-09-28 | Olympus Optical Co Ltd | Distributed control system |
| JP2000092083A (en) * | 1998-09-17 | 2000-03-31 | Nissan Motor Co Ltd | On-vehicle electronic controller |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014080722A1 (en) * | 2012-11-26 | 2014-05-30 | 日立オートモティブシステムズ株式会社 | Control device |
| JP2014105590A (en) * | 2012-11-26 | 2014-06-09 | Hitachi Automotive Systems Ltd | Control device |
| CN104797802A (en) * | 2012-11-26 | 2015-07-22 | 日立汽车系统株式会社 | Control device |
| US9719481B2 (en) | 2012-11-26 | 2017-08-01 | Hitachi Automotive Systems, Ltd. | Control device |
| CN108104967A (en) * | 2012-11-26 | 2018-06-01 | 日立汽车系统株式会社 | On-vehicle control apparatus |
| US10197037B2 (en) | 2012-11-26 | 2019-02-05 | Hitachi Automotive Systems, Ltd. | Control device |
| CN108104967B (en) * | 2012-11-26 | 2020-12-01 | 日立汽车系统株式会社 | Vehicle control device |
| JP2014151689A (en) * | 2013-02-06 | 2014-08-25 | Yazaki Corp | Relay connector unit and electronic device control system provided therewith |
| WO2014132740A1 (en) * | 2013-02-27 | 2014-09-04 | 日立オートモティブシステムズ株式会社 | Vehicle control device |
| JP2014162404A (en) * | 2013-02-27 | 2014-09-08 | Hitachi Automotive Systems Ltd | Vehicle control device |
| US9783138B2 (en) | 2013-02-27 | 2017-10-10 | Hitachi Automotive Systems, Ltd. | Vehicle control device |
| JP2020158055A (en) * | 2019-03-28 | 2020-10-01 | 矢崎総業株式会社 | Wiring harness, and safety management system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4253110B2 (en) | Vehicle control system | |
| US10556618B2 (en) | Drive apparatus and electric power steering apparatus using the same | |
| US8643234B2 (en) | Electrical rotating machine | |
| JP2010116165A (en) | Vehicle control system and automobile using the system | |
| CN110892614B (en) | Electric drive and electric power steering | |
| JP5965912B2 (en) | Power semiconductor module, power conversion device and electric vehicle | |
| JP2015134598A (en) | Motor drive device for electric power steering | |
| JP2016197683A (en) | Electronic control device | |
| JP2011166847A (en) | Rotating electric machine for vehicle | |
| JP6398849B2 (en) | Electronic control unit | |
| JP4166804B2 (en) | Controller-integrated rotating electrical machine | |
| JP2016005384A (en) | Power conversion system | |
| JP2009040424A (en) | Actuator device of vehicle control system | |
| US9999119B2 (en) | Electronic control unit | |
| JP2011188560A (en) | Rotating electric machine for vehicle | |
| JP2015220885A (en) | Mechatronic drive device | |
| TWI388716B (en) | Electronic control apparatus for vehicle | |
| JP3610875B2 (en) | Electric load drive | |
| KR20170068037A (en) | Lead frame assembly type power module package | |
| JP2003264386A (en) | Electronic controller | |
| JP6312170B2 (en) | Mold module | |
| US10763758B1 (en) | Power converting apparatus | |
| US9190397B2 (en) | Semiconductor device | |
| JP5786285B2 (en) | METER DEVICE HAVING VEHICLE POWER SUPPLY DEVICE | |
| JP2011174397A (en) | Control device of internal combustion engine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100308 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100405 |
|
| A521 | Written amendment |
Effective date: 20100407 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100712 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110920 |
|
| A521 | Written amendment |
Effective date: 20111121 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120306 |
|
| A521 | Written amendment |
Effective date: 20120419 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120821 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121018 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130318 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130321 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Effective date: 20130411 Free format text: JAPANESE INTERMEDIATE CODE: A911 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Effective date: 20130517 Free format text: JAPANESE INTERMEDIATE CODE: A912 |