JP2010096512A - 流量センサ - Google Patents
流量センサ Download PDFInfo
- Publication number
- JP2010096512A JP2010096512A JP2008264936A JP2008264936A JP2010096512A JP 2010096512 A JP2010096512 A JP 2010096512A JP 2008264936 A JP2008264936 A JP 2008264936A JP 2008264936 A JP2008264936 A JP 2008264936A JP 2010096512 A JP2010096512 A JP 2010096512A
- Authority
- JP
- Japan
- Prior art keywords
- impeller
- braking
- flow
- flow rate
- fluid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000012530 fluid Substances 0.000 claims abstract description 22
- 238000013459 approach Methods 0.000 claims abstract description 5
- 238000011144 upstream manufacturing Methods 0.000 claims description 6
- 230000008878 coupling Effects 0.000 claims description 4
- 238000010168 coupling process Methods 0.000 claims description 4
- 238000005859 coupling reaction Methods 0.000 claims description 4
- 230000035945 sensitivity Effects 0.000 abstract description 4
- 238000001514 detection method Methods 0.000 description 5
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 230000005489 elastic deformation Effects 0.000 description 3
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images


Landscapes
- Measuring Volume Flow (AREA)
Abstract
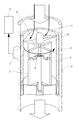
【解決手段】羽根車を流れ方向に対して移動自在に設けると共に、流体の流れを受け、羽根車を下流側に移動させる流体受け部を羽根車に設け、羽根車の下流側に、流体の流れによって流れ方向に移動することなく回転する制動羽根車を設け、かつ、羽根車と制動羽根車との間を離間させる方向に付勢する付勢手段と、この付勢手段による付勢力に抗して羽根車が制動羽根車に所定距離まで近づいた場合に、羽根車と制動羽根車とを連結させて両羽根車を等速で回転させる連結機構を設けた。
【選択図】 図2
Description
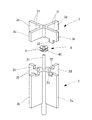
2 制動羽根車
3 羽根車
4 バネ部材
5 磁気センサ
6 演算部
11 整流フィン
21 回転軸
23 係合凹部
32 係合凸部
P 管路
Claims (2)
- 流体が流れる管路の途中に、羽根の先端に磁極を有し流体の流れによって回転する羽根車を設けると共に、羽根車の回転数を検出するため、管路の外部から羽根車の先端の磁極による磁界を検知する磁気センサを備えた流量センサにおいて、上記羽根車を流れ方向に対して移動自在に設けると共に、流体の流れを受け、羽根車を下流側に移動させる流体受け部を羽根車に設け、羽根車の下流側に、流体の流れによって流れ方向に移動することなく回転する制動羽根車を設け、かつ、羽根車と制動羽根車との間を離間させる方向に付勢する付勢手段と、この付勢手段による付勢力に抗して羽根車が制動羽根車に所定距離まで近づいた場合に、羽根車と制動羽根車とを連結させて両羽根車を等速で回転させる連結機構を設けたことを特徴とする流量センサ。
- 上記羽根車は、上記制動羽根車の回転軸線に沿って上流側に延設された回転軸に回転自在に取り付けられていることを特徴とする請求項1に記載の流量センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008264936A JP4954177B2 (ja) | 2008-10-14 | 2008-10-14 | 流量センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008264936A JP4954177B2 (ja) | 2008-10-14 | 2008-10-14 | 流量センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010096512A true JP2010096512A (ja) | 2010-04-30 |
| JP4954177B2 JP4954177B2 (ja) | 2012-06-13 |
Family
ID=42258313
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008264936A Expired - Fee Related JP4954177B2 (ja) | 2008-10-14 | 2008-10-14 | 流量センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4954177B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015219019A (ja) * | 2014-05-14 | 2015-12-07 | 株式会社テージーケー | 給湯システム、検出ユニットおよびセンサ |
| CN111175538A (zh) * | 2020-01-16 | 2020-05-19 | 兰州理工大学 | 一种鱼翼型漂浮式流速仪 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6048120U (ja) * | 1983-09-09 | 1985-04-04 | シ−ケ−ディコントロ−ルズ株式会社 | 流量センサ |
| JPS6059926U (ja) * | 1983-09-30 | 1985-04-25 | 株式会社ノーリツ | 流量検出器 |
| JPS6115519U (ja) * | 1984-07-03 | 1986-01-29 | シ−ケ−デイコントロ−ルズ株式会社 | 流量センサ |
| JPS62187813U (ja) * | 1986-05-20 | 1987-11-30 | ||
| JPH0688736A (ja) * | 1992-09-08 | 1994-03-29 | Aichi Tokei Denki Co Ltd | タービン式流量計 |
| JPH06201418A (ja) * | 1992-12-28 | 1994-07-19 | Rinnai Corp | 流量センサ− |
| JP2000009503A (ja) * | 1998-06-26 | 2000-01-14 | Noritz Corp | 水量センサ |
-
2008
- 2008-10-14 JP JP2008264936A patent/JP4954177B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6048120U (ja) * | 1983-09-09 | 1985-04-04 | シ−ケ−ディコントロ−ルズ株式会社 | 流量センサ |
| JPS6059926U (ja) * | 1983-09-30 | 1985-04-25 | 株式会社ノーリツ | 流量検出器 |
| JPS6115519U (ja) * | 1984-07-03 | 1986-01-29 | シ−ケ−デイコントロ−ルズ株式会社 | 流量センサ |
| JPS62187813U (ja) * | 1986-05-20 | 1987-11-30 | ||
| JPH0688736A (ja) * | 1992-09-08 | 1994-03-29 | Aichi Tokei Denki Co Ltd | タービン式流量計 |
| JPH06201418A (ja) * | 1992-12-28 | 1994-07-19 | Rinnai Corp | 流量センサ− |
| JP2000009503A (ja) * | 1998-06-26 | 2000-01-14 | Noritz Corp | 水量センサ |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015219019A (ja) * | 2014-05-14 | 2015-12-07 | 株式会社テージーケー | 給湯システム、検出ユニットおよびセンサ |
| CN111175538A (zh) * | 2020-01-16 | 2020-05-19 | 兰州理工大学 | 一种鱼翼型漂浮式流速仪 |
| CN111175538B (zh) * | 2020-01-16 | 2021-10-22 | 兰州理工大学 | 一种鱼翼型漂浮式流速仪 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4954177B2 (ja) | 2012-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2008103584A8 (en) | Sensor misalignment detection and estimation system | |
| JP4954177B2 (ja) | 流量センサ | |
| KR101438609B1 (ko) | 브레이크 페달 장치용 스트로크 센서유닛 | |
| JP5012675B2 (ja) | タイヤの姿勢制御装置および方法 | |
| WO2013016453A3 (en) | Low-power vehicle detection | |
| WO2010042973A8 (en) | Tracking the number of vehicles in a queue | |
| JP5967446B2 (ja) | 回転速度検出装置 | |
| WO2015125947A1 (en) | Inertial device, control method and program | |
| CN109891186B (zh) | 集成式双旋转位置传感器 | |
| JP5567626B2 (ja) | 軸流式流量センサー | |
| JP2005249114A5 (ja) | ||
| CN111285237B (zh) | 过热保护装置、制动系统及自动扶梯 | |
| JP4913088B2 (ja) | 流量計 | |
| JP2017515715A (ja) | 車両制御システム | |
| EP2447680B1 (en) | Anti-rotation mechanism for pitot tube | |
| JP2019052707A5 (ja) | ||
| JP2006317233A (ja) | フローセンサ及び配管ユニット | |
| KR102633244B1 (ko) | 실속 인지 장치 및 이를 포함하는 축류 송풍기 | |
| KR20140083782A (ko) | 마그넷 이탈방지용 비접촉식 토크센서 | |
| JPH0210415Y2 (ja) | ||
| JP7090498B2 (ja) | 速度センサレス電動機制御装置 | |
| JP2518785B2 (ja) | 流量センサ− | |
| CN221978683U (zh) | 一种定子、转向系统及车辆 | |
| KR102710661B1 (ko) | 가속도 정보를 이용하는 회전자 위치 추정기 및 이를 이용한 센서리스 모터 제어 시스템 | |
| KR100872638B1 (ko) | 조향각 감지장치를 이용한 절대각 측정 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100618 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120313 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120314 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120313 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4954177 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150323 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |