JP2010074979A - 回転電動機 - Google Patents
回転電動機 Download PDFInfo
- Publication number
- JP2010074979A JP2010074979A JP2008240995A JP2008240995A JP2010074979A JP 2010074979 A JP2010074979 A JP 2010074979A JP 2008240995 A JP2008240995 A JP 2008240995A JP 2008240995 A JP2008240995 A JP 2008240995A JP 2010074979 A JP2010074979 A JP 2010074979A
- Authority
- JP
- Japan
- Prior art keywords
- frame
- stator core
- convex portion
- peripheral surface
- outer peripheral
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
- Motor Or Generator Frames (AREA)
Abstract
【解決手段】 固定子コアの外周面に、径方向を頂点とする概略三角形状の凸部9を備え、凸部9と整合するようにフレーム内周面に凹部10を備え、凸部9の外周面および凹部10の内周面にある2面のうち、どちらか同じ1面をフレーム側面からボルト11で固定するとともに、その他1面に隙間を設け、ボルトで固定する面にフレームよりも柔らかい材質からなる平板12を置き、通風路を凸部と凹部の間に配置する。
【選択図】図1
Description
特許文献1では、図5(a)に示す通り、固定子コア102に軸方向に伸びる溝である凹部103を設けるとともに、凹部103に整合するようにフレーム101の外周面に凸部104を設け、固定子コア102をフレーム101に圧入することにより、電動機駆動時の固定子コア102にかかる反力を、凹部103と凸部104を介してフレーム101の内周面で受け止め、回り止めとしている。その他の固定(回り止め)方法は、図5(b)に示すようにピンを用いるものや、図5(c)に示すように、ボルトを用いるものがある。
このように、従来の回転電動機は、図5(a)では、固定子コアに備えた凹部103とフレームに備えた凸部104を介して、モータ駆動時に固定子コアに加わる反力を、フレーム内周面で受け止めて固定子コアの回り止めとし、図5(b)では、ピン105を介して、図5(c)では、ボルト106を介して、モータ駆動時に固定子コアに加わる反力を、フレーム内周面で受け止め、固定子コアの回り止めとしているのである。
固定子コアの外周面に備えられた軸方向に伸びる溝部や、ピン・ボルトにより、固定子コアの磁路が制限され、電動機駆動時に固定子コアの磁束が乱れ、圧入する際に固定子コアに加わるストレス(引張り応力および残留応力)のため固定子コアに歪みが生じ、固定子コア内部で発生する鉄損(渦電流損とヒステリシス損からなる)が増大し、また、トルク変動が大きくなるという問題があった。
請求項1に記載の発明は、固定子コアと、前記固定子コアを内周面に保持するフレームと、前記フレームの両端に配置したブラケットとから構成される固定子と、前記ブラケットに備えられた軸受けにより支持され、前記巻線からギャップを介した電磁作用によって回転する回転子と、を備える回転電動機において、前記固定子コアの外周部に凸部を備えるとともに、前記フレームの内周部に、前記凸部と整合する凹部を備え、前記凸部の外周面をフレーム側面から固定手段により固定したことを特徴とするものである。
また請求項3記載の発明は、請求項2において前記凸部の外周面のうち、周方向からみてどちらか同じ一面のみをフレーム側面からボルトにより固定したことを特徴とするものである。
また請求項4記載の発明は、請求項2において前記凸部および凹部において、周方向から見てどちらか同じ一面のみをフレーム側面からボルトで固定するとともに、ボルトで固定した面とは異なる面に固定子コアの凸部とフレームの凹部の間に、隙間を設けたことを特徴とするものである。
また請求項6記載の発明は、請求項1乃至5において前記回転電動機を工作機械主軸用電動機または電気自動車駆動用電動機に適用したことを特徴とするものである。
前記固定子コアの外周部に少なくとも1箇所以上の凸部を備えるとともに、前記フレームの内周部に前記凸部と一部で整合する凹部を備え、該凸部の外周面の一部である上辺とフレーム内周面との間に通風路を備え、凸部外周面の一部である斜辺とフレームを、フレーム側面からボルトにより固定したことを特徴とするものである。
また、概略三角形状の凸部・凹部の整合面で、ボルトで固していない面に隙間を設けることで、固定子コアおよびフレームに生じた加工較差が原因で、ボルトで固定する時にフレームが変形して生じる、コアに加わるストレスを緩和することができる。
また、凸部・凹部をボルトで固定する面に、固定子コアよりも柔らかい平板を設けることで、固定子コアおよびフレームの凸部・凹部の面に、加工較差などにより生じた荒さや湾曲などにより、固定子コアに加わるストレスを緩和することができる。
本発明により、固定子コアをフレームに固定する時に、コアに加わるストレスが原因で生じる磁束の乱れを小さくすることができるため、鉄損を低減できトルク変動を小さくすることができる。
また、周方向で考えた時に、固定子コアに配置した凸部とフレームに配置した凹部の間に通風路を配置することで、固定子コアとフレームを固定しているボルト近傍での温度変化が周囲温度に近いい状態、言い換えれば、通風路を周方向の別の場所に配置したものよりもボルト近傍での温度変化を小さくすることができる。これにより、ボルトの緩みを防止できるとともに、通風路の数も増やすことが可能なので冷却効果を高めることができ、同じ径であれば出力を向上でき、同じ出力であれば、小型化が可能となる。
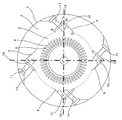
図において、回転電動機1は回転子8、固定子コア3、固定子コア3を取り巻くフレーム2から構成される。この内回転子8は、図示しない界磁用の永久磁石、この永久磁石を固定すると共に界磁磁束を通す回転子コア、回転子シャフトから構成される。次に固定子コア3はフレーム2の内面にはまり込むようになっている。
フレーム2は概略円筒形状のフレームであり、2の内周面に固定子コア3が保持され、フレーム2の軸方向両端にブラケット6が配置されている。回転子8はブラケット6に備えられた軸受け14により支持され、ギャップ7を介して回転可能となっている。
本実施形態が従来技術と異なる部分は、図1に示す通り、固定子コア3の外周面に配置する凸部9を備え、径方向を頂点とする概略三角形状とし、フレーム2の内周面に配置する凹部10を凸部9と整合する形状で、径方向を頂点とする概略三角形状とし、
凸部9の外周面のどちらか同じ1面のみを、ボルト11を用いてフレーム2に固定した部分である。
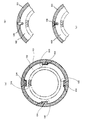
図3が図1と異なる点は、ボルトで固定した面の、その他一方の凸部9と凹部10の間に隙間12を備えた部分である。この隙間12には、文字通り空気であってもよいし、フレーム2およびコア3よりも柔らかい材質であれば、どのようなものでもよい。
このように、概略三角形状の凸部・凹部の整合面で、ボルトで固していない面に隙間を設けることで、固定子コアおよびフレームに生じた加工較差が原因で、ボルトで固定する時にフレームが変形して生じる、コアに加わるストレスを緩和することができるので、磁束の歪みを小さくすることができる。よって、鉄損およびトルク変動を低減できる。
図4が図3と異なる部分は隙間13がボルト11と交わる辺ABに設けていている部分だけである。
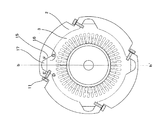
固定子コア3の外周面側に径方向を頂点とする概略三角形状の凸部9(三角形ABC)を角度90度毎に備え(全体で4箇所)ている。平板13は概略三角形状のボルトで固定した面に(辺AB上)に配置されている。
この平板13は、固定子コア3に備えた凸部9と、凸部9と整合するようにフレーム2に備えた凹部10との間に、固定子コアおよびフレームよりも柔らかい材質で構成されている。
なお、本実施例では、固定子コアの凸部とフレームの凹部の形状を概略三角形状としたが、ボルトで固定する面は、平板の厚みよりも小さい範囲で、湾曲していても、本実施形態と同様の効果が得られる。
また、凸部および凹部の数を4個で示しているが、その他、整数個であれば本実施形態と同様の効果が得られる。
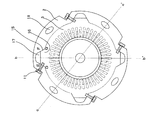
第4実施例の図6が第1実施例の図1と異なる部分は、固定子コアに配置する凸部15の形状を概略台形状とした点,フレームに配置する凹部16の形状を凸部15の台形の斜辺と整合するようにした点,凸部15と凹部16の間に通風路17を配置した点である。その他は図1と同じであるので、できるだけ重複説明を省略する。
凸部15の辺EFを含む外周面と、凹部16の間に軸方向に貫通する通風路17を設け、負荷側から反負荷側に風を流すようにしている。風を流す手段としては、図示しないファン等を回転子上の負荷側または反負荷側のどちらか一方に設置すればよい。
また、凸部および凹部の数を角度90度毎に全体で4箇所示しているが、その他、少なくとも1箇所以上の整数個であれば本実施形態と同様の効果が得られる。
こうすることで、固定子コアとフレーム間の寸法誤差によるギャップが一方向に偏ることを防止することができる。ボルト11の数が4つの場合で説明したが、その数が6、8、10、・・・の場合もこれと同様にして、隣り合うボルトの締め付けられる方向が一方向とならないようにする。つまり隣り合うボルトの締め付けられる方向が概略対向する向きに固定する。
2 フレーム
3 固定子コア
4 スロット
5 電機子巻線
6 ブラケット
7 ギャップ
8 回転子
9 固定子コアの外周面に備えられた凸部
10 凸部9と整合するようにフレーム2の内周面に備えられた凹部
11、11a、11b、11c、11d 凸部9と凹部10を固定するボルト
12 凸部9と凹部10の間に配置する平板
13 凸部9と凹部10の間に備える隙間
14 軸受け
15 固定子コアの凸部
16 フレームの凹部
17 凸部9の外径部に配置した通風路
18 凸部9の間に配置した通風路
101 フレーム
102 固定子コア
103 凹部
104 凸部
Claims (7)
- 固定子コアと、前記固定子コアを内周面に保持するフレームと、前記フレームの両端に配置したブラケットとから構成される固定子と、前記ブラケットに備えられた軸受けにより支持され、前記巻線からギャップを介した電磁作用によって回転する回転子と、を備える回転電動機において、
前記固定子コアの外周部に凸部を備えるとともに、前記フレームの内周部に、前記凸部と整合する凹部を備え、
前記凸部の外周面をフレーム側面から固定手段により固定したことを特徴とする回転電動機。 - 前記固定子コアの外周部に設けた凸部は、前記固定子コアの外周面側に径方向を頂点とする概略三角形状としたことを特徴とする請求項1記載の回転電動機。
- 前記凸部の外周面のうち、周方向からみてどちらか同じ一面のみをフレーム側面からボルトにより固定したことを特徴とする請求項2記載の回転電動機。
- 前記凸部および凹部において、周方向から見てどちらか同じ一面のみをフレーム側面からボルトで固定するとともに、ボルトで固定した面とは異なる面の固定子コアの凸部とフレームの凹部の間に、隙間を設けたことを特徴とする請求項2記載の回転電動機。
- 前記凸部および凹部において周方向から見てどちらか同じ一面のみをフレーム側面からボルトで固定しボルトで固定した面の固定子コアの凸部とフレームの凹部の間に、
前記固定子コアおよび前記フレームよりも軟らかい材質の平板を挿入したことを特徴とする請求項4記載の回転電動機。 - 前記回転電動機を工作機械主軸用電動機または電気自動車駆動用電動機に適用したことを特徴とする請求項1乃至5のいずれかに記載の回転電動機。
- 固定子コアと、前記固定子コアを内周面に保持するフレームと、前記フレームの両端に配置したブラケットとから構成される固定子と、前記ブラケットに備えられた軸受けにより支持され、前記巻線からギャップを介した電磁作用によって回転する回転子とを備える回転電動機において、
前記固定子コアの外周部に少なくとも1箇所以上の凸部を備えるとともに、前記フレームの内周部に前記凸部と一部で整合する凹部を備え、該凸部の外周面の一部である上辺とフレーム内周面との間に通風路となるスペースを備え、凸部外周面の一部である斜辺とフレームを、フレーム側面からボルトにより固定したことを特徴とする回転電動機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008240995A JP2010074979A (ja) | 2008-09-19 | 2008-09-19 | 回転電動機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008240995A JP2010074979A (ja) | 2008-09-19 | 2008-09-19 | 回転電動機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010074979A true JP2010074979A (ja) | 2010-04-02 |
| JP2010074979A5 JP2010074979A5 (ja) | 2011-10-20 |
Family
ID=42206237
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008240995A Pending JP2010074979A (ja) | 2008-09-19 | 2008-09-19 | 回転電動機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010074979A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013126280A (ja) * | 2011-12-14 | 2013-06-24 | Nissan Motor Co Ltd | 回転電機 |
| JP2013528346A (ja) * | 2010-05-28 | 2013-07-08 | シーベイスト アクチボラグ | 水中リニア発電機用固定子フレーム |
| CN109391077A (zh) * | 2018-10-30 | 2019-02-26 | 贵州航天林泉电机有限公司 | 一种带锁制力矩的双余度有限转角力矩电机 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58193741U (ja) * | 1982-06-09 | 1983-12-23 | 三菱電機株式会社 | 回転電機の固定子コアの固定装置 |
| JPH07241050A (ja) * | 1994-02-25 | 1995-09-12 | Hino Motors Ltd | 電気自動車用モータのギャップ調整装置 |
| JP2005304213A (ja) * | 2004-04-14 | 2005-10-27 | Toyota Motor Corp | ステータ固定構造 |
| JP2006254530A (ja) * | 2005-03-08 | 2006-09-21 | Mitsubishi Electric Corp | 電動機 |
-
2008
- 2008-09-19 JP JP2008240995A patent/JP2010074979A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58193741U (ja) * | 1982-06-09 | 1983-12-23 | 三菱電機株式会社 | 回転電機の固定子コアの固定装置 |
| JPH07241050A (ja) * | 1994-02-25 | 1995-09-12 | Hino Motors Ltd | 電気自動車用モータのギャップ調整装置 |
| JP2005304213A (ja) * | 2004-04-14 | 2005-10-27 | Toyota Motor Corp | ステータ固定構造 |
| JP2006254530A (ja) * | 2005-03-08 | 2006-09-21 | Mitsubishi Electric Corp | 電動機 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013528346A (ja) * | 2010-05-28 | 2013-07-08 | シーベイスト アクチボラグ | 水中リニア発電機用固定子フレーム |
| US9157412B2 (en) | 2010-05-28 | 2015-10-13 | Seabased Ab | Stator frame for a submerged linear generator |
| JP2013126280A (ja) * | 2011-12-14 | 2013-06-24 | Nissan Motor Co Ltd | 回転電機 |
| CN109391077A (zh) * | 2018-10-30 | 2019-02-26 | 贵州航天林泉电机有限公司 | 一种带锁制力矩的双余度有限转角力矩电机 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4815967B2 (ja) | 永久磁石式回転電機 | |
| US8299690B2 (en) | Stator structure and rotating electrical machine using the same | |
| US20110050022A1 (en) | Permanent magnet buried type electric motor | |
| JP4696900B2 (ja) | 回転電機 | |
| EP1906509A2 (en) | Rotating electrical machine and alternating-current generator | |
| JP2007014110A (ja) | 回転電機 | |
| WO2014046101A1 (ja) | ステータの固定構造 | |
| US11005322B2 (en) | Rotor assemblies for axial flux machines | |
| US20170047833A1 (en) | Rotary electrical machine | |
| JP2007028734A (ja) | 回転電機 | |
| JP2008148447A (ja) | 電動パワーステアリング装置用モータ | |
| JP2013102597A (ja) | 電動機用ロータおよびブラシレスモータ | |
| JP2007151233A (ja) | 永久磁石型モータ | |
| KR101907877B1 (ko) | Bldc 모터의 스테이터 구조 | |
| JP2010074979A (ja) | 回転電動機 | |
| JP2007336624A (ja) | 多相クローティース型永久磁石モータ | |
| WO2010092774A1 (ja) | 同期回転機の回転子およびこれを備えた空調用ブラシレスdcファンモータ | |
| JP2008278590A (ja) | 回転電機 | |
| CN111684688B (zh) | 旋转电机的转子以及旋转电机 | |
| JP2008306796A (ja) | 回転電機 | |
| JP2009022147A (ja) | アキシャルモータ用コア、ステータおよびアキシャルモータ | |
| KR102120312B1 (ko) | 스테이터 코어 및 이를 포함하는 모터 | |
| WO2014170939A1 (ja) | 回転機械の回転子 | |
| JP2008067574A (ja) | 埋込磁石型モータ | |
| WO2019142564A1 (ja) | 回転子、回転電機、自動車用電動補機システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110404 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110906 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121127 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130402 |