JP2010061655A - 線形特徴を用いた対象追跡 - Google Patents
線形特徴を用いた対象追跡 Download PDFInfo
- Publication number
- JP2010061655A JP2010061655A JP2009182358A JP2009182358A JP2010061655A JP 2010061655 A JP2010061655 A JP 2010061655A JP 2009182358 A JP2009182358 A JP 2009182358A JP 2009182358 A JP2009182358 A JP 2009182358A JP 2010061655 A JP2010061655 A JP 2010061655A
- Authority
- JP
- Japan
- Prior art keywords
- linear
- tracked
- sensor data
- linear features
- linear feature
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Abstract
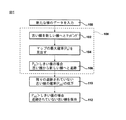
【解決手段】或る環境内で対象を追跡する方法は、環境に関するセンサー・データを取得し、センサー・データ内で線形特徴を識別し、そしてセンサー・データ内で識別された線形特徴と、以前の追跡された線形特徴の集合とを用いて、追跡された線形特徴の集合を決定することを含み、追跡された線形特徴の集合は、環境内の対象を追跡するために使用される。
【選択図】図1
Description
センサーからの2次元又は3次元データのようなポイントの集合は、線分又は平面のような線形特徴に対応する一組の領域内へ分割される。まばらでノイズの多いデータに対してより堅固な、新しいアルゴリズムが開発された。新しい方法は最も近い隣接物の計算を行なうために用いられた。データの局部的な配置に適合することにより、線形特徴の検出アルゴリズムは、例えばセンサーのデータ点のまばらな収集を、堅固に処理することができる。

局所性に基づく近傍アルゴリズムが、近傍計算においてノイズが多くまばらなデータにより生じる問題を軽減するために開発された。例としてのアルゴリズムは、或るポイントの隣接物の選択が、ポイントの局所的な構成に依存することを許容する。しかしながら、この局所的な構成は(実際は)ポイントの隣接物の関数として検出される。
Di=(αDi((p2−p1)・vn)2+1/αDi((p2−p1)・vp)2)1/2 (1)
として定義され得る。
αDi=(λmax/λmin)1/2 (2)
であった。
近傍計算の更なる態様は、線形算入領域の成長である。本概念は、例えそれらの計算された法線ベクトルが、線分内にそれらを含まなかったとしても、線分と合致するポイントをその線分内の適切な位置に含むことである。
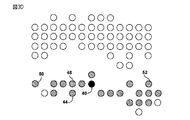
局所性に基づく近傍アルゴリズムの有効性をテストするため、駐車場内の試験車両に対する位置の特定と共に統合された、一連のレーザー距離計のスキャンから由来する、障害物のグリッドに対して試験された。
ポイント・データから線形セグメントを見出すためにアルゴリズムを用いて、環境内での線と対象との間の対応が決定され得る。静的及び動的な障害物の双方を含む環境に対し、これは動的な障害物に対する空間を通じて検出された線の評価及び追跡と同様に、静的な障害物の指標として検出された線の評価を含む。
距離di,j、回転θi,j、及び伸びβij<di,j,θi,j、 βij≧Φ(li,lj)
(γd,di,j),(γθθi,j),(γβmax(βi,j,1/βi,j))〜Np(μΦ,ΣΦ) (3)
の、多変数の正規確率密度関数を持っていた。
一例のアルゴリズムは、新たな測定値を前の証拠に統合するために、ベイズのアプローチを用いる。全てのセンサー測定値を与えられた線lxの、線確率は、
pr(lx|lo)=cΦpΦ (6)
となり、ここでcΦは、cΦpΦ≦1∀Φであるように選ばれる定数である。
pr(lx|lborn)pr(lborn|mt-1...m1)=pborn (7)
本発明の例は、測定値のない場合に線が持続することを可能にする。例えば、動的な障害物が移動して(1つ以上の線で表わされる)静的な障害物の測定を妨げる場合、線の持続は静的な障害物の表示が持続することを可能にする。表IIIに示すような追跡アルゴリズムに関して、線の持続は、新しい線にマッピングされていない、古い線にのみ当てはまり得る。
本発明の例のアルゴリズムを用いて得られるような、線形特徴に基づく環境の表示はさらに、知覚と場面のモデリングとを含む多くの用途に用いられ得る。
12 ボックス
14 ボックス
16 ボックス
20 ボックス
22 ボックス
24 ボックス
26 ボックス
28 ボックス(点線)
30 ボックス
32 ボックス
40 ポイント
42 ポイント
44 ポイント
46 ポイント
48 ポイント
50 ポイント
52 ポイント
60 障害物マップ
62 線
64 線
66 線
68 線
100 ボックス
102 ボックス
104 ボックス
106 ボックス
108 ボックス
110 ボックス
112 ボックス
120 線
122 線
124 線
126 線
140 領域
142 車両
144 光線
146 領域
148 長方形
150 長方形
160
161 図の背景
162 特徴
164 特徴
166 特徴
168 特徴
Claims (17)
- 或る環境内で対象を追跡する方法であって、該方法が:
前記環境に関するセンサー・データを取得し、
前記センサー・データ内の現在の線形特徴を識別し、
追跡された線形特徴の以前の集合から前記現在の線形特徴へ、以前の線形特徴を追跡し、そして
前記環境内の対象を追跡するために用いられる、追跡された線形特徴の集合を作ることを含み、
前記追跡された線形特徴の集合が:
以前の線形特徴から追跡された現在の線形特徴と、
以前の線形特徴から追跡されなかった現在の線形特徴と、
現在の線形特徴へと追跡されなかった以前の線形特徴と
を含む方法。 - 以前の線形特徴を各々の現在の線形特徴へとマッピングするための、マッピング確率を決定し、
最高のマッピング確率を識別し、そして
前記最高のマッピング確率がしきい値よりも大きい場合に、前記以前の線形特徴を前記現在の線形特徴へと追跡すること
をさらに含む、請求項1に記載の方法。 - 前記マッピング確率が空間変位、伸び、及び再配向から選ばれた、少なくとも1つのパラメータに関して表わされる、請求項2に記載の方法。
- 追跡された線形特徴の前記現在の集合内の、各々の線形特徴が特性的確率を有し、
該特性的確率が、線形性と相関する寄与を含む、請求項1に記載の方法。 - 追跡された線形特徴の前記集合内における以前の線形特徴の特性的確率が、追跡された線形特徴の前記以前の集合において使用される確率値よりも小さい、請求項4に記載の方法。
- 前記センサー・データが距離データを含み、前記線形特徴が線分又は平面である、請求項1に記載の方法。
- 前記環境を通して車両の自動航法を補助するために用いられる、請求項1に記載の方法。
- 或る環境内で対象を追跡する方法であって、該方法が:
前記環境から得られたセンサー・データを用いて、前記環境内の現在の線形特徴を識別し、
前記現在の線形特徴に対する、以前の追跡された線形特徴のマッピングを識別し、
各々の現在の線形特徴に対する特性的確率を決定し、そして
前記現在の線形特徴を含む、追跡された現在の線形特徴の集合を作ることを含み、
前記現在の追跡された線形特徴が、現在の線形特徴へ写像されない、マッピング無しの以前の線形特徴をさらに含み、マッピングされていない以前の線形特徴の前記特性的確率が低くされ、
追跡された線形特徴の前記集合とマッピングとが、前記環境内で対象を追跡するために使用される方法。 - 関連する特性的確率がしきい値よりも低い場合に、マッピングされていない以前の線形特徴が、現在の追跡された線形特徴の前記集合から取り除かれる、請求項8に記載の方法。
- 前記現在の線形特徴に対する、以前の追跡された線形特徴のマッピングが、複数の可能なマッピングに対するマッピング確率の決定と、しきい値よりも大きいマッピング確率を有するマッピングの選択とを含む、請求項8に記載の方法。
- 前記マッピング確率が空間変位、伸び、及び再配向から選ばれた、少なくとも1つのパラメータに関して表わされる、請求項10に記載の方法。
- 前記センサー・データが距離センサーを用いて得られた距離データを含み、前記距離センサーがライダー・センサー、レーダー・センサー、及びソナー・センサーから成るセンサーの群から選ばれる、請求項8に記載の方法。
- 或る環境内で対象を追跡する方法であって、該方法が:
前記環境からの、距離データを含むセンサー・データを取得し、
該センサー・データを用いて、前記環境内で線形特徴を識別し、そして
前記線形特徴を追跡することによって、前記環境内で対象を追跡することを含み、
前記線形特徴が:
各センサー・データ点の周りでサンプリングされたセンサー・データを用いた、各センサー・データ点に対する法線ベクトルの決定と、
類似の法線ベクトルを有する、近接したセンサー・データ点のクラスタリングと
を含む局所性に基づく近傍計算を用いて、前記センサー・データ内で識別される方法。 - 各センサー・データの周りでサンプリングされた前記センサー・データが、適応できる局所的な距離関数を用いて選ばれる、請求項13に記載の方法。
- 近接したセンサー・データ点のクラスタリングにより形成された線形特徴が:
前記線形特徴の拡張と合致する位置を有するセンサー・データ点を、該線形特徴の中に含むことによりさらに拡張される、請求項13に記載の方法。 - 前記センサー・データが距離データの2次元の配列を表わし、前記線形特徴が線分である、請求項13に記載の方法。
- 前記センサー・データが距離データの3次元の配列を表わし、前記線形特徴が平面である、請求項13に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/186,581 US8705792B2 (en) | 2008-08-06 | 2008-08-06 | Object tracking using linear features |
| US12/186,581 | 2008-08-06 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010061655A true JP2010061655A (ja) | 2010-03-18 |
| JP2010061655A5 JP2010061655A5 (ja) | 2012-08-02 |
| JP5539680B2 JP5539680B2 (ja) | 2014-07-02 |
Family
ID=41653005
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009182358A Expired - Fee Related JP5539680B2 (ja) | 2008-08-06 | 2009-08-05 | 線形特徴を用いた対象追跡 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8705792B2 (ja) |
| JP (1) | JP5539680B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011097570A (ja) * | 2009-10-30 | 2011-05-12 | Mitsubishi Electric Research Laboratories Inc | 欲張り探索を使用して符号測定値からスパース信号を再構築する方法 |
| JP2018041278A (ja) * | 2016-09-07 | 2018-03-15 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置および画像領域分割方法 |
| JP2020509494A (ja) * | 2017-03-17 | 2020-03-26 | 本田技研工業株式会社 | マルチモーダル融合による3dオブジェクト検出と配向推定の結合 |
Families Citing this family (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4455417B2 (ja) * | 2005-06-13 | 2010-04-21 | 株式会社東芝 | 移動ロボット、プログラム及びロボット制御方法 |
| JP4675811B2 (ja) * | 2006-03-29 | 2011-04-27 | 株式会社東芝 | 位置検出装置、自律移動装置、位置検出方法および位置検出プログラム |
| US8364442B2 (en) * | 2009-02-17 | 2013-01-29 | Schlumberger Technology Corporation | Automated structural interpretation |
| US8699755B2 (en) * | 2009-02-20 | 2014-04-15 | Navteq B.V. | Determining travel path features based on retroreflectivity |
| US8731777B2 (en) | 2009-08-18 | 2014-05-20 | Crown Equipment Corporation | Object tracking and steer maneuvers for materials handling vehicles |
| US8600172B2 (en) | 2011-03-16 | 2013-12-03 | Sensormatic Electronics, LLC | Video based matching and tracking by analyzing one or more image abstractions |
| US20120238876A1 (en) * | 2011-03-18 | 2012-09-20 | Fujifilm Corporation | Ultrasound diagnostic apparatus and method of producing ultrasound image |
| JP5316572B2 (ja) * | 2011-03-28 | 2013-10-16 | トヨタ自動車株式会社 | 物体認識装置 |
| CN103889879B (zh) | 2011-10-19 | 2017-03-22 | 克朗设备公司 | 识别、匹配并跟踪图像序列中的多个对象 |
| KR101901588B1 (ko) * | 2012-01-02 | 2018-09-28 | 삼성전자주식회사 | 물체 인식 방법과, 물체 인식을 위한 기술자 생성 방법, 물체 인식을 위한 기술자 생성 장치 |
| US8948954B1 (en) * | 2012-03-15 | 2015-02-03 | Google Inc. | Modifying vehicle behavior based on confidence in lane estimation |
| US9336302B1 (en) | 2012-07-20 | 2016-05-10 | Zuci Realty Llc | Insight and algorithmic clustering for automated synthesis |
| US9063548B1 (en) | 2012-12-19 | 2015-06-23 | Google Inc. | Use of previous detections for lane marker detection |
| US9081385B1 (en) | 2012-12-21 | 2015-07-14 | Google Inc. | Lane boundary detection using images |
| US9250324B2 (en) | 2013-05-23 | 2016-02-02 | GM Global Technology Operations LLC | Probabilistic target selection and threat assessment method and application to intersection collision alert system |
| EP2894600B1 (en) * | 2014-01-14 | 2018-03-14 | HENSOLDT Sensors GmbH | Method of processing 3D sensor data to provide terrain segmentation |
| US20150308920A1 (en) * | 2014-04-24 | 2015-10-29 | Honeywell International Inc. | Adaptive baseline damage detection system and method |
| CN103984037B (zh) * | 2014-04-30 | 2017-07-28 | 深圳市墨克瑞光电子研究院 | 基于视觉的移动机器人障碍物检测方法和装置 |
| DE102014007565A1 (de) * | 2014-05-22 | 2015-11-26 | Connaught Electronics Ltd. | Verfahren zum Ermitteln einer jeweiligen Grenze zumindest eines Objekts, Sensorvorrichtung, Fahrerassistenzeinrichtung und Kraftfahrzeug |
| DE102014111124A1 (de) * | 2014-08-05 | 2016-02-25 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Erkennen zumindest eines Objekts in einem Umgebungsbereich eines Kraftfahrzeugs mittels eines Ultraschalllsensors, Fahrerassistenzsystem sowie Kraftfahrzeug |
| US9725040B2 (en) * | 2014-10-28 | 2017-08-08 | Nissan North America, Inc. | Vehicle object detection system |
| US11037320B1 (en) * | 2016-03-01 | 2021-06-15 | AI Incorporated | Method for estimating distance using point measurement and color depth |
| FR3048517B1 (fr) | 2016-03-07 | 2022-07-22 | Effidence | Robot autonome motorise avec anticipation d'obstacle |
| US9990535B2 (en) | 2016-04-27 | 2018-06-05 | Crown Equipment Corporation | Pallet detection using units of physical length |
| US10339708B2 (en) * | 2016-11-01 | 2019-07-02 | Google Inc. | Map summarization and localization |
| DE102016122296A1 (de) * | 2016-11-21 | 2018-05-24 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Erfassen und zur Klassifizierung eines Objekts mittels zumindest einer Sensorvorrichtung auf Basis einer Belegungskarte, Fahrerassistenzsystem sowie Kraftfahrzeug |
| US11205103B2 (en) | 2016-12-09 | 2021-12-21 | The Research Foundation for the State University | Semisupervised autoencoder for sentiment analysis |
| US11300964B2 (en) * | 2016-12-20 | 2022-04-12 | Korea Advanced Institute Of Science And Technology | Method and system for updating occupancy map for a robotic system |
| US10438405B2 (en) * | 2017-03-02 | 2019-10-08 | Sony Corporation | Detection of planar surfaces for use in scene modeling of a captured scene |
| US10489663B2 (en) | 2017-04-24 | 2019-11-26 | Toyota Research Institute, Inc. | Systems and methods for identifying changes within a mapped environment |
| DE102017213214A1 (de) | 2017-08-01 | 2019-02-07 | Ford Global Technologies, Llc | Verfahren zum Modellieren eines Kraftfahrzeug-Sensors in einer virtuellen Testumgebung |
| EP3514648B1 (en) * | 2018-01-22 | 2023-09-06 | Continental Autonomous Mobility Germany GmbH | Method and apparatus for detecting a boundary in an envi-ronment of an object |
| US10740645B2 (en) * | 2018-06-29 | 2020-08-11 | Toyota Research Institute, Inc. | System and method for improving the representation of line features |
| CN109253731A (zh) * | 2018-08-06 | 2019-01-22 | 百度在线网络技术(北京)有限公司 | 停车场地图生成方法、装置、设备及可读存储介质 |
| US11747444B2 (en) * | 2018-08-14 | 2023-09-05 | Intel Corporation | LiDAR-based object detection and classification |
| US10885327B2 (en) * | 2019-01-28 | 2021-01-05 | Uber Technologies, Inc. | Efficient handling of digital map data differences |
| CN113316806B (zh) | 2019-02-01 | 2024-01-02 | 克朗设备公司 | 远程控制设备的板载充电站 |
| US11641121B2 (en) | 2019-02-01 | 2023-05-02 | Crown Equipment Corporation | On-board charging station for a remote control device |
| CN110361727A (zh) * | 2019-07-22 | 2019-10-22 | 浙江大学 | 一种毫米波雷达多目标跟踪方法 |
| US11250576B2 (en) | 2019-08-19 | 2022-02-15 | Toyota Research Institute, Inc. | Systems and methods for estimating dynamics of objects using temporal changes encoded in a difference map |
| CN116057491A (zh) | 2020-08-11 | 2023-05-02 | 克朗设备公司 | 远程控制设备 |
| DE102020211649A1 (de) | 2020-09-17 | 2022-03-17 | Conti Temic Microelectronic Gmbh | Verfahren und System zum Erstellen eines Straßenmodells |
| US20230296404A1 (en) * | 2022-03-21 | 2023-09-21 | Here Global B.V. | System and method for updating a map according to feature locations |
| US12062135B2 (en) * | 2022-06-15 | 2024-08-13 | Gm Cruise Holdings Llc | Three-dimensional motion grid system for autonomous vehicle perception |
| US20230419658A1 (en) * | 2022-06-23 | 2023-12-28 | Lockheed Martin Corporation | Real time light-detection and ranging point decimation |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001319224A (ja) * | 2000-05-08 | 2001-11-16 | Fujitsu Ltd | 3次元物体検出装置と3次元物体検出方法及び記録媒体 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5988862A (en) * | 1996-04-24 | 1999-11-23 | Cyra Technologies, Inc. | Integrated system for quickly and accurately imaging and modeling three dimensional objects |
| US6173066B1 (en) * | 1996-05-21 | 2001-01-09 | Cybernet Systems Corporation | Pose determination and tracking by matching 3D objects to a 2D sensor |
| US6766037B1 (en) * | 1998-10-02 | 2004-07-20 | Canon Kabushiki Kaisha | Segmenting moving objects and determining their motion |
| US6724916B1 (en) * | 2000-01-05 | 2004-04-20 | The United States Of America As Represented By The Secretary Of The Navy | Composite hough transform for multitarget multisensor tracking |
| JP4429461B2 (ja) * | 2000-03-17 | 2010-03-10 | 本田技研工業株式会社 | 画像処理装置、平面検出方法、及び平面検出プログラムを記録した記録媒体 |
| JP4409035B2 (ja) * | 2000-03-22 | 2010-02-03 | 本田技研工業株式会社 | 画像処理装置、特異箇所検出方法、及び特異箇所検出プログラムを記録した記録媒体 |
| US6677941B2 (en) * | 2000-08-05 | 2004-01-13 | American Gnc Corporation | Three-dimensional relative positioning and tracking using LDRI |
| JP4861574B2 (ja) * | 2001-03-28 | 2012-01-25 | パナソニック株式会社 | 運転支援装置 |
| JP3945279B2 (ja) * | 2002-03-15 | 2007-07-18 | ソニー株式会社 | 障害物認識装置、障害物認識方法、及び障害物認識プログラム並びに移動型ロボット装置 |
| US7003136B1 (en) * | 2002-04-26 | 2006-02-21 | Hewlett-Packard Development Company, L.P. | Plan-view projections of depth image data for object tracking |
| JP3994950B2 (ja) * | 2003-09-19 | 2007-10-24 | ソニー株式会社 | 環境認識装置及び方法、経路計画装置及び方法、並びにロボット装置 |
| US7317417B2 (en) * | 2004-07-12 | 2008-01-08 | Orhan Arikan | Methods for detection and tracking of targets |
| JP4604703B2 (ja) * | 2004-12-21 | 2011-01-05 | アイシン精機株式会社 | 駐車補助装置 |
| US7720580B2 (en) * | 2004-12-23 | 2010-05-18 | Donnelly Corporation | Object detection system for vehicle |
| JP4352034B2 (ja) * | 2005-09-13 | 2009-10-28 | 株式会社東芝 | 物体位置検出装置、地図作成装置、自律移動装置、物体位置検出方法および物体位置検出プログラム |
| WO2008013568A2 (en) * | 2005-12-30 | 2008-01-31 | Irobot Corporation | Autonomous mobile robot |
| US8577538B2 (en) * | 2006-07-14 | 2013-11-05 | Irobot Corporation | Method and system for controlling a remote vehicle |
| KR101143176B1 (ko) * | 2006-09-14 | 2012-05-08 | 주식회사 만도 | 조감도를 이용한 주차구획 인식 방법, 장치 및 그를 이용한주차 보조 시스템 |
| US8611591B2 (en) * | 2007-12-21 | 2013-12-17 | 21 Ct, Inc. | System and method for visually tracking with occlusions |
-
2008
- 2008-08-06 US US12/186,581 patent/US8705792B2/en active Active
-
2009
- 2009-08-05 JP JP2009182358A patent/JP5539680B2/ja not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001319224A (ja) * | 2000-05-08 | 2001-11-16 | Fujitsu Ltd | 3次元物体検出装置と3次元物体検出方法及び記録媒体 |
Non-Patent Citations (4)
| Title |
|---|
| CSNB199700007001; 井口征士,外1名: 「三次元画像計測」 初版, 19901120, p.74, 株式会社昭晃堂 * |
| CSND200600315002; 岡田隆三,外2名: '"車載カメラによる車両周辺監視装置"' 画像ラボ 第16巻,第7号, 2005, p.9-13, 日本工業出版株式会社 * |
| JPN6013031118; 岡田隆三,外2名: '"車載カメラによる車両周辺監視装置"' 画像ラボ 第16巻,第7号, 2005, p.9-13, 日本工業出版株式会社 * |
| JPN6013060504; 井口征士,外1名: 「三次元画像計測」 初版, 19901120, p.74, 株式会社昭晃堂 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011097570A (ja) * | 2009-10-30 | 2011-05-12 | Mitsubishi Electric Research Laboratories Inc | 欲張り探索を使用して符号測定値からスパース信号を再構築する方法 |
| JP2018041278A (ja) * | 2016-09-07 | 2018-03-15 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置および画像領域分割方法 |
| US11010901B2 (en) | 2016-09-07 | 2021-05-18 | Sony Interactive Entertainment Inc. | Information processing apparatus and image region segmentation method |
| JP2020509494A (ja) * | 2017-03-17 | 2020-03-26 | 本田技研工業株式会社 | マルチモーダル融合による3dオブジェクト検出と配向推定の結合 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8705792B2 (en) | 2014-04-22 |
| US20100034422A1 (en) | 2010-02-11 |
| JP5539680B2 (ja) | 2014-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5539680B2 (ja) | 線形特徴を用いた対象追跡 | |
| CN104035439B (zh) | 用多个激光雷达传感器利用扫描点追踪物体的贝叶斯网络 | |
| Siegemund et al. | A temporal filter approach for detection and reconstruction of curbs and road surfaces based on conditional random fields | |
| KR100702663B1 (ko) | 입자 필터 프레임 워크에서 전방향 시각센서 기반 위치추정 및 매핑을 위한 방법 | |
| JP2021523443A (ja) | Lidarデータと画像データの関連付け | |
| Adarve et al. | Computing occupancy grids from multiple sensors using linear opinion pools | |
| Kim et al. | L-shape model switching-based precise motion tracking of moving vehicles using laser scanners | |
| JP6349418B2 (ja) | 高精度単眼移動によるオブジェクト位置特定 | |
| US20220108544A1 (en) | Object detection apparatus, system and method | |
| KR101864127B1 (ko) | 무인 차량을 위한 주변 환경 매핑 방법 및 장치 | |
| JP7224682B1 (ja) | 自律走行のための3次元多重客体検出装置及び方法 | |
| CN105447881A (zh) | 基于多普勒的雷达图像分割及光流 | |
| CN105574892A (zh) | 雷达图像中的基于多普勒的分割及光流 | |
| Naujoks et al. | Fast 3D extended target tracking using NURBS surfaces | |
| Zeng | An object-tracking algorithm for 3-D range data using motion and surface estimation | |
| Muresan et al. | Multimodal sparse LIDAR object tracking in clutter | |
| Wang et al. | 3D-LIDAR based branch estimation and intersection location for autonomous vehicles | |
| Ji et al. | Automatic calibration of camera sensor networks based on 3D texture map information | |
| US20240025428A1 (en) | Method, electronic device and medium for target state estimation | |
| WO2024015891A1 (en) | Image and depth sensor fusion methods and systems | |
| Zhang et al. | Visual odometry based on random finite set statistics in urban environment | |
| Richter et al. | Advanced occupancy grid techniques for lidar based object detection and tracking | |
| Diamantas et al. | Depth computation using optical flow and least squares | |
| Strand et al. | Modeling Inter-Vehicle Occlusion Scenarios in Multi-Camera Traffic Surveillance Systems | |
| CN112612788A (zh) | 一种无导航卫星信号下的自主定位方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120614 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120614 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130603 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5539680 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140501 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |