JP2010052601A - Wiper control device for vehicle - Google Patents
Wiper control device for vehicle Download PDFInfo
- Publication number
- JP2010052601A JP2010052601A JP2008220208A JP2008220208A JP2010052601A JP 2010052601 A JP2010052601 A JP 2010052601A JP 2008220208 A JP2008220208 A JP 2008220208A JP 2008220208 A JP2008220208 A JP 2008220208A JP 2010052601 A JP2010052601 A JP 2010052601A
- Authority
- JP
- Japan
- Prior art keywords
- mode
- vehicle
- threshold
- raindrop
- wiping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 78
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 8
- 230000000087 stabilizing effect Effects 0.000 abstract 1
- 238000000034 method Methods 0.000 description 42
- 230000008569 process Effects 0.000 description 40
- 230000008859 change Effects 0.000 description 10
- 230000035945 sensitivity Effects 0.000 description 9
- 230000007423 decrease Effects 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 5
- 230000033001 locomotion Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 101100450325 Arabidopsis thaliana HDG3 gene Proteins 0.000 description 2
- 101100255937 Arabidopsis thaliana RVE3 gene Proteins 0.000 description 2
- 101100255938 Arabidopsis thaliana RVE4 gene Proteins 0.000 description 2
- 101150005470 LCL2 gene Proteins 0.000 description 2
- 101150067746 LCL3 gene Proteins 0.000 description 2
- 101100074248 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) LCL1 gene Proteins 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 101100255943 Arabidopsis thaliana RVE8 gene Proteins 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 239000010426 asphalt Substances 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000003542 behavioural effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
Images









Landscapes
- Investigating Or Analysing Materials By Optical Means (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
Description
本発明は、雨滴等を検出する雨滴センサの検出結果に基づいてワイパー装置の作動を制御する車両用ワイパー制御装置に関するものである。 The present invention relates to a vehicle wiper control device that controls the operation of a wiper device based on a detection result of a raindrop sensor that detects raindrops and the like.
従来の車両用ワイパー制御装置では、フロントウィンドシールドにおける雨滴センサの検出領域に付着した雨滴量に基づいてワイパー装置の払拭作動を制御する構成としている。ところで、自動車が降雨中を走行しているときにおいて、フロントウィンドシールドへの雨滴付着状態は、降雨状態が一定であっても、自動車の挙動条件等により大きく変化する。そのため、雨滴センサにより検出した雨滴量に基づいてワイパー装置の払拭作動を制御する従来の車両用ワイパー制御装置では、自動車の挙動条件等が変化したときに、ワイパー装置の払拭動作をそれに対応して素早く切り替えることが困難である。 In the conventional vehicle wiper control device, the wiping operation of the wiper device is controlled based on the amount of raindrops attached to the detection region of the raindrop sensor in the front windshield. By the way, when the automobile is traveling in the rain, the raindrop adhesion state on the front windshield varies greatly depending on the behavior condition of the automobile even if the rain state is constant. Therefore, in the conventional vehicle wiper control device that controls the wiping operation of the wiper device based on the amount of raindrop detected by the raindrop sensor, the wiping operation of the wiper device corresponding to the change in the behavioral condition of the automobile corresponds to that. It is difficult to switch quickly.
このような問題を解決するために、たとえば、自動車の速度変化度合い(加速度)を検出して、雨滴量および加速度の両情報に基づいてワイパー装置の払拭モードを判定し払拭動作を行う構成としたものがある(特許文献1参照)。
従来の車両用ワイパー制御装置に用いられる雨滴センサは、良好な前方視界確保するためにフロントウィンドシールドにおけるその占有面積、つまり雨滴量検出に供される検出領域の面積が出来るだけ小さくなるように製作されている。すなわち、フロントウィンドシールドの中の極狭い面積に付着した雨滴量に基づいてフロントウィンドシールド全体における雨滴量を判定し、それに基づいてワイパー装置の払拭作動を制御している。このように雨滴センサの検出領域が狭いことにより、降雨状態が一定であっても雨滴センサの検出領域への雨滴付着度合いが変化することがあり、それに対応してワイパー装置の払拭作動モードが変化する、すなわち払拭モードがモードアップあるいはモードダウンする場合がある。このような現象が頻繁に発生すると、運転者はワイパー装置の払拭動作が不安定であると感じてしまう。 Raindrop sensors used in conventional vehicle wiper control devices are manufactured so that the area occupied by the windshield, that is, the area of the detection area used for detecting the amount of raindrops, is as small as possible in order to ensure a good forward view. Has been. That is, the amount of raindrops in the entire front windshield is determined based on the amount of raindrops attached to an extremely small area in the front windshield, and the wiping operation of the wiper device is controlled based on the determination. As described above, since the raindrop sensor detection area is narrow, the degree of raindrop adhesion to the raindrop sensor detection area may change even when the rain condition is constant, and the wiper device wiping operation mode changes accordingly. In other words, the wiping mode may be mode up or mode down. When such a phenomenon occurs frequently, the driver feels that the wiping operation of the wiper device is unstable.
このような、ワイパー装置の払拭動作が不安定となる状態は、車両の走行速度が変化中であるとき、あるいは車両の進行方向前方に先行車両が走行しているときに発生しやすい。特に、後者の場合は先行車両が跳ね上げた路面に溜まっている雨水飛沫(以降、スプラッシュと表す。)が自車のフロントウィンドシールドへ付着するが、スプラッシュの付着度合いが一定ではないので、ワイパー装置の払拭動作が不安定になりがちである。 Such a state in which the wiping operation of the wiper device becomes unstable is likely to occur when the traveling speed of the vehicle is changing or when the preceding vehicle is traveling forward in the traveling direction of the vehicle. In particular, in the latter case, rainwater splashes (hereinafter referred to as splash) collected on the road surface from which the preceding vehicle jumped up adhere to the front windshield of the vehicle, but the degree of splash adhesion is not constant. The wiping action of the device tends to be unstable.
上述の特許文献1に記載された車両用ワイパー制御装置の場合、自動車の加速度が大きい場合(たとえば急加速時等)はフロントウィンドシールドへの単位時間当たりの雨滴付着量が増大するので、加速度が大きいときは直ちに払拭モードアップ(ワイパーの往復払拭動作間隔時間がより短い払拭モードへ切り替えること)する、等の制御を行っている。これにより、自動車の加速度が大きい場合等においては払拭モードのモードアッ等適切な処置をとることでワイパー装置の払拭動作を因り安定させることが可能である。しかしながら、上述の特許文献1に記載された車両用ワイパー制御装置は、先行車両により跳ね上げられたスプラッシュの付着に対しては、有効な処置を採ることができない。
In the case of the vehicle wiper control device described in
本発明は、上記の問題点に鑑みなされたもので、その目的は、自車の進行方向前方を先行車両が走行していることを検出し、そのことに基づいてワイパー装置の払拭動作を制御することにより、常に良好な前方視界を維持できるとともに、ワイパー装置の払拭動作を安定させることが可能な車両用ワイパー制御装置を提供することである。 The present invention has been made in view of the above-described problems, and its purpose is to detect that a preceding vehicle is traveling ahead of the traveling direction of the own vehicle, and to control the wiping operation of the wiper device based on that. Thus, it is an object to provide a vehicle wiper control device that can always maintain a good front view and can stabilize the wiping operation of the wiper device.
本発明は上記目的を達成する為、以下の技術的手段を採用する。 In order to achieve the above object, the present invention employs the following technical means.
本発明の請求項1に記載の車両用ワイパー制御装置は、ワイパーブレードを動かしてウィンドシールドに付着した水滴を払拭するワイパー装置と、ウィンドシールド上におけるワイパーブレードの払拭範囲内に設定された検出領域に付着した水滴量に応じた雨滴信号を出力する雨滴センサと、雨滴センサからの雨滴信号が入力されて雨滴量を算出するとともに算出した雨滴量に基づいてワイパー装置へ駆動信号を出力するコントローラと、を備え、コントローラは、ワイパーブレードの往復払拭動作間隔時間であるワイパー停止期間中に検出された雨滴信号を積分して雨滴量を算出する雨滴量判定部と、雨滴量判定部で算出された雨滴量に基づいて次回の往復払拭動作間隔時間である払拭モードを判定し且つ判定された払拭モードでワイパーブレードに払拭動作をさせるようにワイパー装置に駆動信号を出力する払拭モード判定部と、を備え、払拭モード判定部は、雨滴量判定部で判定された雨滴量がモードダウン閾値以上モードアップ閾値以下であるときあるいは雨滴量判定部で判定された雨滴量が前記モードアップ閾値より大きいとの判定が連続して繰り返された回数がモードアップ閾値回数未満であるときあるいは雨滴量判定部で判定された雨滴量がモードダウン閾値より小さいとの判定が連続して繰り返された回数がモードダウン閾値回数未満であるときには、その時点で選定されている払拭モードを維持し、雨滴量判定部で判定された雨滴量が前記モードアップ閾値より大きいときあるいは雨滴量判定部で判定された雨滴量が前記モードアップ閾値より大きいとの判定が連続してモードアップ閾値回数だけ繰り返されたときには、その時点で選定されている払拭モードよりも前記ワイパーブレードの往復払拭動作間隔時間がより短い前記払拭モードへモードアップし、雨滴量判定部で判定された雨滴量が前記モードダウン閾値より小さいときあるいは雨滴量判定部で判定された雨滴量が前記モードダウン閾値より小さいとの判定が連続してモードダウン閾値回数だけ繰り返されたときには、その時点で選定されている払拭モードよりもワイパーブレードの往復払拭動作間隔時間がより長い払拭モードへモードダウンする車両用ワイパー制御装置であって、車両用ワイパー制御装置が搭載された車両である自車の走行速度を検出する速度センサと、自車の進行方向前方にある物体を検出する前方物体検出手段と、コントローラ内に設けられて前方物体検出手段からの検出信号に基づいて自車と物体との距離である前方距離を算出する前方距離算出手段と、を備え、コントローラは、速度センサからの検出信号に基づいて算出された自車の走行速度および前方物体検出手段からの検出信号に基づいて算出された前方距離に基づいてモードアップ閾値、モードダウン閾値、モードアップ回数閾値およびモードダウン回数閾値の少なくとも一つを可変するような閾値調整制御を行うことを特徴としている。
The wiper control device for a vehicle according to
従来の車両用ワイパー制御装置では、フロントウィンドシールド上に雨滴センサを設置し、フロントウィンドシールドにおける雨滴センサの検出領域に付着した雨滴量に基づいてワイパー装置の払拭作動を制御する構成としている。自車の進行方向前方を先行車両が走行している場合は、フロントウィンドシールド上へは降雨の雨滴に加えて先行車両が跳ね上げた路面の雨水飛沫であるスプラッシュも付着する。この先行車両によるスプラッシュ量は、路面状態、つまりアスファルト、コンクリート、多孔質舗装、轍の有無等の影響を受けて変動し、フロントウィンドシールドへのスプラッシュ付着量や付着位置も変動する。このため、検出領域の小さい雨滴センサによりフロントウィンドシールドへのスプラッシュ付着量を正確に検出するのは困難である。すなわち、先行車両がある場合には、先行車両がいないときに比べてスプラッシュが付着する分だけフロントウィンドシールドへの付着水滴量が多くなるにも拘らず雨滴センサがそのことを正確には検知できないため、ワイパー装置の払拭モードが水滴付着状態に即した払拭モードに適時に切り替えられず、フロントウィンドシールドを透過した前方視界が妨げられる可能性がある。以上により、従来の車両用ワイパー制御装置においては、自車前方を先行車両が走行している場合には、先行車両が跳ね上げたスプラッシュを効果的にフフロントウィンドシールドから除去して運転者の前方視界を良好に維持することが困難となる。 In a conventional vehicle wiper control device, a raindrop sensor is installed on the front windshield, and the wiping operation of the wiper device is controlled based on the amount of raindrops attached to the detection area of the raindrop sensor on the front windshield. When the preceding vehicle is traveling in front of the traveling direction of the host vehicle, splash that is rainwater splash on the road surface that the preceding vehicle jumped up is attached to the front windshield in addition to raindrops. The amount of splash by the preceding vehicle fluctuates due to the influence of road surface conditions, that is, asphalt, concrete, porous pavement, presence of dredging, and the like, and the amount and position of splash adhering to the front windshield also fluctuate. For this reason, it is difficult to accurately detect the amount of splash adhering to the front windshield by the raindrop sensor having a small detection area. That is, when there is a preceding vehicle, the raindrop sensor cannot accurately detect the amount of water droplets adhering to the front windshield as much as the amount of splash attached compared to when there is no preceding vehicle. For this reason, the wiping mode of the wiper device cannot be switched to the wiping mode in accordance with the water droplet adhesion state in a timely manner, and there is a possibility that the front view through the front windshield may be hindered. As described above, in the conventional vehicle wiper control device, when the preceding vehicle is traveling in front of the host vehicle, the splash splashed by the preceding vehicle is effectively removed from the front windshield and It becomes difficult to maintain a good front view.
ところで、車両が走行中に後上方へ跳ね上げるスプラッシュ量は、車両の走行速度が高いほど多くなる。跳ね上げられたスプラッシュは、ある時間空中に漂った後路面上に落下する。したがって、自車が先行車両の後ろを追従走行する際において、自車のフロントウィンドシールド上へのスプラッシュ付着量は、走行速度が高いほど多く、且つ自車と先行車両との車間距離が小さいほど多くなる。 By the way, the splash amount that jumps up rearward while the vehicle is traveling increases as the traveling speed of the vehicle increases. Splashed splash falls on the road after drifting in the air for a certain time. Therefore, when the own vehicle follows the back of the preceding vehicle, the amount of splash adhering to the front windshield of the own vehicle increases as the traveling speed increases and the distance between the own vehicle and the preceding vehicle decreases. Become more.
以上により、自車の前方における先行車両の有無、自車の走行速度および自車と先行車両との車間距離、3つが判れば、これらに基づいて自車のフロントウィンドシールドへのスプラッシュ付着量を推定することができる。そして、ワイパー装置の払拭動作を推定したスプラッシュ付着量に適応したものとなるように制御すれば、先行車両に追従走行する際においてもフロントウィンドシールドに付着したスプラッシュを効果的に除去することが可能となる。 Based on the above, if there are three, the presence or absence of the preceding vehicle in front of the own vehicle, the traveling speed of the own vehicle and the distance between the own vehicle and the preceding vehicle, the amount of splash adhering to the front windshield of the own vehicle can be calculated based on these. Can be estimated. By controlling the wiper device so that the wiping action of the wiper device is adapted to the estimated amount of splash adhesion, it is possible to effectively remove the splash adhered to the front windshield even when following the preceding vehicle. It becomes.
本発明の請求項1に記載の車両用ワイパー制御装置は、車両用ワイパー制御装置が搭載された車両である自車の走行速度を検出する速度センサと、自車の進行方向前方にある物体を検出する前方物体検出手段と、コントローラ内に設けられて前方物体検出手段からの検出信号に基づいて自車と物体との距離である前方距離を算出する前方距離算出手段と、を備え、コントローラは、速度センサからの検出信号に基づいて算出された自車の走行速度および前方物体検出手段からの検出信号に基づいて算出された前方距離に基づいてモードアップ閾値、モードダウン閾値、モードアップ回数閾値およびモードダウン回数閾値の少なくとも一つを可変するような閾値調整制御を行っている。 According to a first aspect of the present invention, there is provided a vehicle wiper control device comprising: a speed sensor that detects a traveling speed of a vehicle that is a vehicle equipped with the vehicle wiper control device; and an object that is in front of the traveling direction of the vehicle. A forward object detection means for detecting, and a forward distance calculation means for calculating a forward distance that is a distance between the vehicle and the object based on a detection signal from the forward object detection means provided in the controller. The mode-up threshold, the mode-down threshold, and the mode-up count threshold based on the traveling speed of the vehicle calculated based on the detection signal from the speed sensor and the forward distance calculated based on the detection signal from the forward object detection means In addition, threshold adjustment control is performed so as to vary at least one of the mode down frequency thresholds.
モードアップ閾値、モードダウン閾値、モードアップ回数閾値およびモードダウン回数閾値それぞれの大小とワイパー装置の払拭動作との関係について説明する。モードアップ閾値は低いほど払拭モードがモードアップし易くなり、モードダウン閾値は低いほど払拭モードがモードダウンし難くなる。ここで、「モードダウンし難い」とは、「現状の払拭モードを保持し易い」ということと同義である。一方、モードアップ回数閾値は少ないほどモードアップし易くなり、モードダウン回数閾値は多いほどモードダウンし難くなる。 The relationship between the magnitudes of the mode-up threshold, the mode-down threshold, the mode-up count threshold, and the mode-down count threshold and the wiping operation of the wiper device will be described. The lower the mode-up threshold value, the easier the wiping mode will be mode-up, and the lower the mode-down threshold value, the more difficult the wiping mode will be mode-down. Here, “difficult to mode down” is synonymous with “easy to maintain the current wiping mode”. On the other hand, the smaller the mode up number threshold, the easier the mode up, and the larger the mode down number threshold, the more difficult the mode down.
降雨時に自車前方に先行車両が走行中である場合は、降雨に加えて先行車両が跳ね上げたスプラッシュまでもが自車のフロントウィンドシールドに付着することになる。したがって、良好な前方視界確保の観点からは、ワイパー装置の払拭動作をモードアップする、あるいは、少なくとも現状の払拭モードを維持する、のどちらかを選択する必要がある。 When the preceding vehicle is traveling ahead of the vehicle at the time of rain, even the splash that the preceding vehicle has jumped in addition to the rain adheres to the front windshield of the own vehicle. Therefore, from the viewpoint of securing a good front view, it is necessary to select either wiping up the wiper device or at least maintaining the current wiping mode.
本発明の請求項1に記載の車両用ワイパー制御装置は、自車前方に先行車両があることを検出し、自車の走行速度および自車と先行車両との車間距離に基づいてモードアップ閾値およびモードダウン閾値の少なくとも一方を可変するような閾値調整制御を行うことによって、払拭モードを通常より早めにモードアップする、あるいは通常よりも遅めにモードダウンする等して、フロントウィンドシールドに付着した雨滴やスプラッシュを素早く除去することができる。すなわち、自車のフロントウィンドシールドへの雨滴やスプラッシュの付着量の変動に影響を及ぼす状況の変化を検出し、それに基づいてワイパー装置の払拭動作を制御するので、ワイパー装置の払拭動作を、常にフロントウィンドシールドへの雨滴やスプラッシュ付着状況に適したものに制御することができる。したがって、常に良好な前方視界を維持できるとともに、ワイパー装置の払拭動作を安定させることが可能な車両用ワイパー制御装置を提供することができる。
The wiper control device for a vehicle according to
請求項2に記載の車両用ワイパー制御装置は、閾値調整制御は、コントローラが前方物体検出手段からの検出信号に基づいて自車前方に先行車両有りと判定したときに、前方距離が短いほど、モードアップ閾値をより小さく設定すること、モードダウン閾値をより小さく設定すること、モードアップ回数閾値をより小さく設定すること、およびモードダウン回数閾値をより大きく設定することの少なくとも一つを実行し、且つ走行速度が高いほど、モードアップ閾値をより小さく設定すること、モードダウン閾値をより小さく設定すること、モードアップ回数閾値をより小さく設定すること、およびモードダウン回数閾値をより大きく設定することの少なくとも一つを実行するものであることを特徴としている。 In the vehicle wiper control device according to claim 2, when the controller determines that there is a preceding vehicle ahead of the host vehicle based on the detection signal from the front object detection means, Executing at least one of setting a mode-up threshold value smaller, setting a mode-down threshold value smaller, setting a mode-up frequency threshold value smaller, and setting a mode-down frequency threshold value larger; In addition, the higher the traveling speed, the smaller the mode-up threshold value, the smaller the mode-down threshold value, the smaller the mode-up number threshold value, and the larger the mode-down number threshold value. It is characterized by executing at least one.
自車のフロントウィンドシールドに付着した先行車両によるスプラッシュを素早く除去するためにはワイパーブレードの往復払拭動作頻度を高めることが効果的であり、通常よりも早めに払拭モードをモードアップする、あるいは、通常よりも遅めに払拭モードをモードダウンするのが望ましい。 Increasing the frequency of the wiper blade's reciprocating wiping operation is effective in order to quickly remove the splash caused by the preceding vehicle attached to the front windshield of the vehicle, and mode up the wiping mode earlier than usual, or It is desirable to mode down the wiping mode later than usual.
通常よりも早めに払拭モードをモードアップするためには、雨滴量検出感度を高めてやればよいことになる。すなわち、検出した雨滴量とモードアップ閾値との関係のみに基づいて払拭モードアップ可否を判定している場合は、雨滴量検出感度を高めるためには、モードアップ閾値を小さくすればよい。また、検出した雨滴量がモードアップ閾値を上回る事象が連続して発生した回数に基づいて払拭モードアップ可否を判定している場合は、雨滴量検出感度を高めるためには、モードアップ回数閾値を小さくすればよい。 In order to improve the wiping mode earlier than usual, the raindrop amount detection sensitivity should be increased. That is, when it is determined whether or not the wiping mode can be increased based only on the relationship between the detected amount of raindrops and the mode-up threshold, the mode-up threshold may be reduced in order to increase the raindrop amount detection sensitivity. In addition, when it is determined whether or not the wiping mode up is possible based on the number of times that the detected raindrop amount exceeds the mode-up threshold, the mode-up count threshold is set to increase the raindrop detection sensitivity. Just make it smaller.
一方、通常よりも遅めに払拭モードをモードダウンするためには、やはり、雨滴量検出感度を高めてやればよいことになる。すなわち、検出した雨滴量とモードダウン閾値との関係のみに基づいて払拭モードダウン可否を判定している場合は、雨滴量検出感度を高めるためには、モードダウン閾値を小さくすればよい。また、検出した雨滴量がモードダウン閾値を下回る事象が連続して発生した回数に基づいて払拭モードダウン可否を判定している場合は、雨滴量検出感度を高めるためには、モードダウン回数閾値を大きくすればよい。 On the other hand, in order to down-mode the wiping mode later than usual, the raindrop amount detection sensitivity should be increased. That is, when it is determined whether or not the wiping mode down is possible based only on the relationship between the detected raindrop amount and the mode-down threshold, the mode-down threshold may be reduced in order to increase the raindrop amount detection sensitivity. In addition, when it is determined whether or not the wiping mode down is possible based on the number of times that the detected raindrop amount falls below the mode down threshold, the mode down frequency threshold is set to increase the raindrop detection sensitivity. Just make it bigger.
本発明の請求項2に記載の車両用ワイパー制御装置では、前方距離が短いほど、すなわちスプラッシュ付着量が多いほど、モードアップ閾値をより小さく設定すること、モードダウン閾値をより小さく設定すること、モードアップ回数閾値をより小さく設定すること、およびモードダウン回数閾値をより大きく設定することの少なくとも一つを実行し、且つ走行速度が高いほど、すなわちスプラッシュ付着量が多いほど、モードアップ閾値をより小さく設定すること、モードダウン閾値をより小さく設定すること、モードアップ回数閾値をより小さく設定すること、およびモードダウン回数閾値をより大きく設定することの少なくとも一つを実行するようにしている。これにより、ワイパー装置の払拭動作を、常にフロントウィンドシールドへの雨滴やスプラッシュ付着状況に適したものに制御することができる。したがって、常に良好な前方視界を維持できるとともに、ワイパー装置の払拭動作を安定させることが可能な車両用ワイパー制御装置を提供することができる。 In the vehicle wiper control device according to claim 2 of the present invention, the shorter the forward distance, that is, the greater the amount of splash adhesion, the smaller the mode-up threshold is set, and the mode-down threshold is set smaller. At least one of setting the mode-up frequency threshold value to a smaller value and setting the mode-down frequency threshold value to a larger value is performed, and the higher the traveling speed, that is, the greater the amount of splash adhesion, the more At least one of setting a smaller value, setting a mode-down threshold value smaller, setting a mode-up count threshold value smaller, and setting a mode-down count threshold value larger is executed. Thereby, the wiping operation | movement of a wiper apparatus can be always controlled to the thing suitable for the raindrop and splash adhesion condition to a front windshield. Therefore, it is possible to provide a vehicle wiper control device that can always maintain a good front view and can stabilize the wiping operation of the wiper device.
本発明の請求項3に記載の車両用ワイパー制御装置は、自車への降雨が遮断されるか否かを判定する降雨遮断判定手段を備え、コントローラは、降雨遮断判定手段からの検出信号に基づいて自車への降雨が遮断されると判定したときに閾値調整制御を中止し且つ降雨遮断判定手段からの検出信号に基づいて自車への降雨が遮断されないと判定したときに閾値調整制御を実行することを特徴としている。 According to a third aspect of the present invention, there is provided a vehicle wiper control device comprising a rain interception judging means for judging whether or not the rain on the own vehicle is interrupted, and the controller outputs a detection signal from the rain interception judging means. Threshold adjustment control is stopped when it is determined that the rain on the own vehicle is blocked based on the detection signal from the rain blocking judgment means, and the threshold adjustment control is determined when it is determined that the rain on the own vehicle is not blocked It is characterized by performing.
車両の上方に降雨を遮る構造物がある場合、たとえばトンネル内、あるいは高架道路や高架鉄道の下の道路の場合、路面上への降雨が遮断され路面上の雨水量は極わずかである。そのため、自車の前方に先行車両が走行中であってもフロントウィンドシールドへのスプラッシュ付着量はほとんどない。このような状況下においては、スプラッシュを効果的に除去するための閾値調整制御は実行せず、通常のワイパー制御、すなわち雨滴センサの検出領域に付着した雨滴量に基づくワイパー装置の払拭作動制御を実行すればよい。 When there is a structure that blocks rainfall above the vehicle, for example, in a tunnel, or a road under an elevated road or an elevated railway, rainfall on the road surface is blocked and the amount of rain water on the road surface is very small. For this reason, there is almost no amount of splash adhering to the front windshield even when the preceding vehicle is traveling in front of the host vehicle. Under such circumstances, threshold adjustment control for effectively removing the splash is not executed, and normal wiper control, that is, wiping operation control of the wiper device based on the amount of raindrops attached to the detection area of the raindrop sensor is performed. Just do it.
本発明の請求項3に記載の車両用ワイパー制御装置では、自車への降雨が遮断されるか否かを判定する降雨遮断判定手段を備えているので、降雨下を走行中先行車両がある場合には閾値調整制御を実行して先行車両によるスプラッシュを効果的に除去できるとともに、車両上への降雨が遮断されるような状況下においては直ちに閾値調整制御を中断して通常のワイパー装置の払拭作動制御へ切り替えるので、常に運転者の前方視界を良好に維持することができる車両用ワイパー制御装置を提供できる。 In the vehicle wiper control device according to the third aspect of the present invention, the vehicle wiper control device includes the rain interception judging means for judging whether or not the rain to the own vehicle is interrupted, so that there is a preceding vehicle traveling under the rain. In this case, the threshold adjustment control can be executed to effectively remove the splash caused by the preceding vehicle, and the threshold adjustment control is immediately interrupted in a situation where rainfall on the vehicle is blocked, and the normal wiper device Since switching to the wiping operation control is performed, it is possible to provide a vehicle wiper control device that can always maintain a good front view of the driver.
本発明の請求項4に記載の車両用ワイパー制御装置は、降雨遮断判定手段は、自車前方の明るさを検出する前方照度センサ、自車上方の明るさを検出する上方照度センサおよびナビゲーションシステムの少なくとも一つであることを特徴としている。 According to a fourth aspect of the present invention, in the vehicle wiper control device, the rain interception determining means includes a front illuminance sensor that detects brightness in front of the host vehicle, an upper illuminance sensor that detects brightness above the host vehicle, and a navigation system. It is characterized by being at least one of the following.
前方照度センサおよび上方照度センサは、たとえば車両の灯火の点灯・消灯制御に使用されているものであり、それらの検出信号に基づいて主にトンネルの有無を確認する、すなわち降雨遮断判定を行うことができる。また、ナビゲーションシステムは、衛星からの信号および自車が持つ地図データを用いて自車の位置を認識する、いわゆるマップマッチングを行うものである。したがって、地図データ中にトンネルや高架の記載があれば、やはり容易に降雨遮断判定を行うことができる。なお、前方照度センサおよび上方照度センサ、ナビゲーションシステムは、それぞれ既存のものを流用することができ、閾値調整制御用としてわざわざ設ける必要が無い。したがって、コスト上昇を抑制しつつ降雨遮断判定を行うことが可能な車両用ワイパー制御装置を提供できる。 The front illuminance sensor and the upper illuminance sensor are used, for example, to control lighting / extinguishing of vehicle lights, and mainly check the presence or absence of a tunnel based on their detection signals, that is, perform a rain interception determination. Can do. The navigation system performs so-called map matching in which the position of the vehicle is recognized using a signal from a satellite and map data of the vehicle. Therefore, if there is a description of a tunnel or an overhead in the map data, it is possible to easily make a rain interception determination. Note that the front illuminance sensor, the upper illuminance sensor, and the navigation system can each use existing ones, and there is no need to bother to provide threshold adjustment control. Therefore, it is possible to provide a vehicular wiper control device capable of making a rain interception determination while suppressing an increase in cost.
以下、本発明にかかる車両用ワイパー制御装置の一実施の形態について、自動車に搭載された車両用ワイパー制御装置1に適用した場合を例に図面を参照して説明する。
Hereinafter, an embodiment of a vehicle wiper control device according to the present invention will be described with reference to the drawings, taking as an example a case of application to a vehicle
車両用ワイパー制御装置1は、自動車100に搭載され、ワイパーコントロールスイッチ30の操作ポジションに応じて、運転席前方のウィンドシールドであるフロントウィンドシールド101に付着した雨滴を払拭するワイパー装置10の作動制御を行うものである。特に、ワイパーコントロールスイッチ30において自動制御(AUTOモード)ポジションが選択されると、雨滴センサ20によりフロントウィンドシールド101に付着した雨滴量を検出し、その判定結果に基づいてワイパー装置10の作動制御を行う。
A vehicle
先ず、車両用ワイパー制御装置1の全体構成について説明する。
First, the overall configuration of the vehicle
車両用ワイパー制御装置1は、図1に示すように、ワイパー装置10、雨滴センサ20、ワイパーコントロールスイッチ30、ワイパーコントロールスイッチ30からの信号、雨滴センサ20からの信号に基づいてワイパー装置10を駆動するコントローラ50、自動車100の前方に存在する物体を検出するレーザレーダ装置40、自動車100の走行速度を検出する速度センサ60、降雨遮断判定手段としてのナビゲーションシステム70等から構成されている。車両用ワイパー制御装置1は、自動車100のイグニションスイッチ80を介して自動車100のバッテリ70から電力が供給されている。以下に、図1に示す車両用ワイパー制御装置1を構成する各要素について簡単に説明する。
As shown in FIG. 1, the vehicle
ワイパー装置10は、図2に示すように、ワイパーモータ11と、フロントウィンドシールド101上において往復払拭動作を行うワイパーブレード13と、ワイパーモータ11が発生する駆動トルクを往復運動に変換するとともにワイパーブレード13に伝達してワイパーブレード13に往復運動させるリンク機構12とを備えている。ワイパーブレード13の往復払拭動作は、コントローラ50内に備えられた払拭モード判定部51からワイパーモータ11に対し駆動指示信号が出力されることで実行される。図1ではコントローラ50とワイパーモータ11が直接接続されている状態を示しているが、中間にワイパーモータ11の駆動装置が存在する場合もある。
As shown in FIG. 2, the
ワイパーコントロールスイッチ30は、自動車100内の運転席に設置され、ワイパーブレード13の往復払拭動作の停止(OFFモード)、自動制御(AUTOモード)、低速動作(LOモード)、及び高速動作(HIモード)を、運転者の手動操作等により切り替えるスイッチ機能を有している。ワイパーコントロールスイッチ30は、たとえば運転者が手により回転操作されるロータリスイッチにより構成されており、上述した4つの作動位置のいずれか1つに回動操作されることで、これら動作モードの1つが選択される。そしてワイパーコントロールスイッチ30は、上述した4動作モードのうちの1つが選択されると、その選択された動作モードについての情報を後述するコントローラ50(払拭モード判定部51)へ出力している。
The
雨滴センサ20は、図3に示されるように、基本的には、フロントウィンドシールド101の検出領域Adに向かって例えば赤外光を発光する発光ダイオードなどの発光素子21と、この発光素子21から発光されてフロントウィンドシールド101により反射された光の受光量に応じた出力値を出力するフォトダイオードなどの受光素子22とを有して構成されている。発光素子21および受光素子22とフロントウィンドシールド101との間には、図3に示すように、プリズム23が設置されている。発光素子21から出射された光は、図3中において矢印で示すようにプリズム23内を進行してフロントウィンドシールド101の外表面に達し、そこで反射した光はプリズム23内を進行して受光素子22に入射する。また、発光素子21、受光素子22およびプリズム23は、図3に示すように、ケーシング24内に収容されている。発光素子21は、図示しない発光素子駆動回路を介してコントローラ50に接続されており、コントローラ50によってその点消灯が制御される。また、受光素子22は、図示しない検波増幅回路を介してコントローラ50に接続されており、検出した雨滴量に応じた検出信号をコントローラ50に出力している。検出領域Adに雨滴が付着していないときにあっては、発光素子21から発光された赤外光は、図3中の実線矢印で示すように進行し、そのほとんどがフロントウィンドシールド101によって反射され、受光素子22で受光される。しかし、検出領域Adに雨滴Dが付着しているときにあっては、発光素子21から発光された赤外光の一部は、検出領域Adに付着した雨滴Dを介して図3中の破線矢印で示すように進行しフロントウィンドシールド101外へ出射するので、受光素子22により受光される光の量が減少する。検出領域Adに付着した雨滴D量が多いほど、フロントウィンドシールド101外へ出射する光量が多くなり、受光素子22により受光される光の量が少なくなる。これにより、受光素子22による受光量に基づいて、検出領域Adに付着する雨滴の量を検出することができる。本発明の一実施形態による車両用ワイパー制御装置1においては、検出領域Adに付着する雨滴量が多いほど雨滴センサ20の検出信号は小さくなり、検出領域Adに付着する雨滴量が少ないほど雨滴センサ20の検出信号は大きくなる。
As shown in FIG. 3, the
自動車100の前方に存在する物体を検出する前方物体検出手段としてのレーザレーダ装置40は、図2に示すように、自動車100の前端部分に取り付けられ、後述するコントローラ50に電気的に接続されている。レーザレーダ装置40は、レーザ発光素子(図示せず)および受光素子(図示せず)を備え、レーザ発光素子(図示せず)がレーザ光を自動車100の前方へ向けて照射するとともに、受光素子(図示せず)がレーザ光の自動車100前方にある物体で反射した反射光を受光する。受光素子(図示せず)はレーザ光の反射光を受光すると検出信号を出力し、この検出信号はコントローラ50へ入力される。
As shown in FIG. 2, a
コントローラ50は、たとえばマイクロコンピュータを含む電気回路として構成され、実際には、制御処理や演算処理を行うCPU、各種プログラムやデータを保存するための読み取り専用メモリ(ROM)や書き込み可能なメモリ(RAM)等のメモリを含む記憶装置、AD変換器等の入力回路、出力回路、及び電源回路等の機能を含んでいる。
The
コントローラ50は、機能的には、図1に示すように、払拭モード判定部51、雨滴量判定部52、前方距離算出部53、速度判定部54および降雨遮断判定部55を備えている。雨滴量判定部52は、雨滴センサ20から出力される検出信号に基づいてフロントウィンドシールド101に付着した雨滴量を判定する。払拭モード判定部51は、ワイパーコントロールスイッチ30からの信号、あるいは雨滴量判定部52からの信号に基づいて、ワイパーブレード13の払拭動作に係る払拭モードを判定し、且つこの判定結果に基づいてワイパーモータ11に対して駆動信号を出力する。つまり、ワイパーコントロールスイッチ30が自動制御(AUTOモード)以外のポジションに操作されている場合は、払拭モード判定部51は操作されたポジションに対応した払拭モードを判定し、その払拭モードを実行させるべくワイパーモータ11に対して駆動信号を出力する。一方、ワイパーコントロールスイッチ30が自動制御(AUTOモード)ポジションに操作されている場合は、払拭モード判定部51は雨滴量判定部52からの信号、前方距離算出部53からの信号、速度判定部54および降雨遮断判定部55からの信号に基づいてワイパーブレード13の払拭動作に係る払拭モードを判定し、その払拭モードを実行させるべくワイパーモータ11に対して駆動信号を出力する。ここで、払拭モード判定部51により判定される払拭モードは、停止モード、停止待機モード、ワイパーブレード13による往復払拭動作間隔時間が順次短くなる複数の間歇モード、低速モードおよび高速モードから構成されている。複数の間歇モードは、本発明の一実施形態による車両用ワイパー制御装置1においては、往復払拭動作間隔時間の長い方から順に、例えば、7.0秒、3.3秒、1.5秒、0.6秒となっている。また、低速モードおよび高速モードは、ワイパーコントロールスイッチ30において設定されている低速動作(LOモード)ポジションおよび高速動作(HIモード)ポジションと同じである。前方距離算出部53は、レーザレーダ装置40から出力される検出信号に基づいて自動車100と前方物体(たとえば先行車両等)との距離、つまり自動車100と先行車両との車間距離を算出する。速度判定部54は、速度センサ60からの検出信号に基づいて自動車100の走行速度を算出する。降雨遮断判定部55は、降雨遮断判定手段であるナビゲーションシステム70から出力される位置情報信号に基づいて、自動車100が走行中である場所が、降雨が遮断されるような場所であるか否かを判定する。降雨が遮断されるような場所とは、路面上に屋根に相当する構築物があり雨が路面上に降り注がないような場所のことであり、たとえばトンネル内、高架道路や高架鉄道の下、建物内の駐車場等である。
As shown in FIG. 1, the
ナビゲーションシステム70は、一般的に車両に搭載されているもので、内蔵する地図データやGPS衛星からの信号等に基づいて自車の位置を算出し表示器(図示せず、たとえば液晶パネル等)上に画像として表示するものである。コントローラ50はナビゲーションシステム70に接続されており、自動車100に関する位置情報がコントローラ50の降雨遮断判定部55へ入力される。
The
本発明の一実施形態による車両用ワイパー制御装置1においては、ワイパーコントロールスイッチ30が自動制御(AUTOモード)に操作されると、コントローラ50は、雨滴検出動作、払拭モード判定動作、前方距離算出動作、速度判定動作、降雨遮断判定動作の5種類の制御動作を同時に並行して処理する。
In the vehicle
次に、本発明の一実施形態による車両用ワイパー制御装置1の特徴について、従来の車両用ワイパー制御装置の場合と比較しつつ簡単に説明する。従来の車両用ワイパー制御装置では、雨滴センサからの検出信号に基づいて算出した雨滴量情報のみに基づいてワイパー装置の払拭モードを判定している。ところで、自車前方を先行車両が走行しているときは、フロントウィンドシールド上へは降雨に加えて先行車両により跳ね上げられた路上の雨水飛沫であるスプラッシュも付着する。フロントウィンドシールドへのスプラッシュ付着量は、路上における雨水の溜まり具合や風向により大きく変動する。このため、雨滴センサの検出領域への水滴付着状態も不安定となり、雨滴センサの検出信号に基づいて判定される払拭モードも不安定となり、つまり払拭モードが短周期で変化するようになり運転者が違和感を覚える可能性がある。
Next, characteristics of the vehicle
このような問題を解消するために、本発明の一実施形態による車両用ワイパー制御装置1では、図4に示すように、雨滴センサ20による雨滴量情報のほかに、レーザレーダ装置40による先行車両との車間距離情報、速度センサ60による車速情報およびナビゲーションシステム70による降雨遮断情報の3情報を追加して取り込み、これら4種類の情報に基づいて払拭モードを判定する構成としている。これにより、フロントウィンドシールド上の雨滴やスプラッシュを適切なタイミングで除去して良好な前方視界を確保するとともに、払拭モードが不安定となることを抑制できる。以下に、本発明の一実施形態による車両用ワイパー制御装置1において、ワイパーコントロールスイッチ30がAUTOモードに操作されているときにコントローラ50において実行されるワイパー装置10の払拭動作制御について具体的に説明する。
In order to solve such a problem, in the vehicle
先ず、本発明の一実施形態による車両用ワイパー制御装置1において、ワイパーコントロールスイッチ30がAUTOモードに操作されているときに実行される払拭動作制御の全体の流れについて、図5のフローチャートに基づいて説明する。
First, in the vehicle
ワイパー払拭自動制御が開始されると、先ず、ステップ101では初期化がなされる。
When the wiper wiping automatic control is started, first, in
次に、ステップ102において入力処理が実行される。すなわち、レーザレーダ装置40からの検出信号に基づいて判定された車間距離情報、速度センサ60からの検出信号に基づいて算出された車速情報、ナビゲーションシステム70からの自動車100の位置環境情報が入力される。続いて、ステップ103において、ステップ102で取り込んだ3情報に基づいて、後述するステップ105にて実行される払拭モード判定処理に用いられる雨滴量閾値、すなわち、モードアップ閾値およびモードダウン閾値を選定する。モードアップ閾値およびモードダウン閾値を選定は、図6に示すフローチャートに基づいて図7に示す閾値選定マップを参照して行われる。ステップ103における雨滴量閾値選定処理の具体的手順については後に説明する。
Next, in
次に、ステップ104において、雨滴センサ20からの検出信号に基づいて雨滴量を判定する。続いて、ステップ105において、ステップ104で判定した雨滴量と、ステップ103で選定したモードアップ閾値およびモードダウン閾値とに基づいて払拭モードを判定する。続いて、ステップ106において、ステップ105で判定した払拭モードでワイパー装置10が払拭動作を行うようにワイパーモータ11を駆動するための駆動信号を出力する。
Next, in
ここで、図5のフローチャート中のステップ103における閾値選定処理、つまりモードアップ閾値およびモードダウン閾値選定処理の具体的な流れ、およびステップ105における払拭モード判定処理の具体的な流れについて説明する。
Here, the specific flow of the threshold selection process in
先ず、モードアップ閾値およびモードダウン閾値選定処理の具体的な流れについて、図6に示すフローチャートおよび図7に示す閾値選定マップに基づいて説明する。 First, the specific flow of the mode-up threshold and mode-down threshold selection processing will be described based on the flowchart shown in FIG. 6 and the threshold selection map shown in FIG.
先ず、閾値選定処理のフローについて図6に基づいて説明する。モードアップ閾値およびモードダウン閾値選定処理が開始されると、先ず、ステップ201で、自動車100の前方に先行車両があるかどうかを判定する。これは、レーザレーダ装置40からの出力信号に基づいて行われ、自動車100と前方物体との距離がXm以上であるときは、「先行車両無し」と判定する。自動車100と前方物体との距離がXm未満であるときは、「先行車両有り」と判定する。「先行車両有り」と判定した場合は、車間距離データを保存する。
First, the flow of threshold selection processing will be described with reference to FIG. When the mode-up threshold and mode-down threshold selection processing is started, first, at
ステップ201における判定結果が「先行車両無し」の場合は、ステップ204へ進み、「先行車両無し」条件で閾値選定マップを参照し、払拭モード判定に用いるモードアップ閾値およびモードダウン閾値を選定する。ステップ201における判定結果が「先行車両有り」の場合は、次のステップ202へ進む。
If the determination result in
ステップ202では、自動車100が降雨遮断環境下を走行中であるかどうかを判定する。この判定は、ナビゲーションシステム70からの自動車100の位置環境情報に基づいて行われる。これは、降雨時において、自動車100が降雨中を走行しているか、または、雨が降り注がないような場所、たとえばトンネル内、高架下、地下駐車場内等を走行しているかを判定するものである。言い換えると、先行車両によるスプラッシュの有無を判定するものである。ステップ202における判定結果が「降雨遮断環境である」場合、つまりスプラッシュ無し環境である場合は、ステップ204へ進み、「先行車両無し」条件で閾値選定マップを参照してモードアップ閾値およびモードダウン閾値を選定する。ステップ202における判定結果が「降雨遮断環境ではない」場合、つまりスプラッシュ有り環境である場合は、ステップ203へ進み、「先行車両あり」条件で閾値選定マップを参照してモードアップ閾値およびモードダウン閾値を選定する。
In
ここで、図7に示す閾値選定マップについて説明する前に、本発明の一実施形態による車両用ワイパー制御装置1において実行される払拭モード判定処理の概要、特に雨滴センサ20の出力信号に基づいて算定された雨滴量データの取扱方法を中心に説明する。
Here, before describing the threshold selection map shown in FIG. 7, based on the outline of the wiping mode determination process executed in the vehicle
モードアップ閾値およびモードダウン閾値は雨滴量であり、モードアップ閾値(以降UCLと表す)およびモードダウン閾値(以降LCLと表す)は、図8に示すように、UCLがLCLよりも大きい値として設定されている。図8の縦軸は、雨滴センサ20からの検出信号に基づきコントローラ50の雨滴量判定部52により判定された雨滴量を示し、横軸は時間を示す。図8中の×印は判定された雨滴量データを示す。雨滴量は、下方から上方へ向かうに連れて多くなっている。本発明の一実施形態による車両用ワイパー制御装置1の払拭モード判定処理では、両閾値のどちらか一方を超える、あるいは下回る雨滴量データが連続して所定回数得られたら払拭モードを切り替えている。すなわち、図8に示すように、算出された雨滴量(図8中の×印)がUCLを超えた回数がm回連続したら、その時点(図8中の時刻t1)で払拭モードをモードアップする。一方、図8に示すように、算出された雨滴量(図8中の×印)がLCLを下回った回数がn回連続したら、その時点(図8中の時刻t2)で払拭モードをモードダウンする。雨滴センサ20の検出領域面積はフロントウィンドシールド101の面積に比べて大幅に小さいため、雨滴センサ2の検出領域における雨滴付着密度とフロントウィンドシールド全域における雨滴付着密度とが必ずしも一致しない可能性がある。つまり、降雨状態が変化していなくても、算出した雨滴量が変動する可能性がある。そこで、算出した雨滴量が閾値を連続して所定回数超えたときに初めて払拭モードを切り替えれば、確実に降雨状態の変化を検出して、それに適した払拭モードに切り替えることができる。なお、本発明の一実施形態による車両用ワイパー制御装置1では、モードアップの判定基準となるUCLを超えた回数であるモードアップ回数閾値をm回、モードダウンの判定基準となるLCLを下回った回数であるモードダウン回数閾値をn回として両者が異なっているが、必ずそのようにする必要はなく、モードアップ回数閾値とモードダウン回数閾値と等しくしてもよい。また、モードアップ回数閾値およびモードダウン回数閾値の値は、車両用ワイパー制御装置に対する要求仕様に応じて適宜設定されるものである。
The mode-up threshold and the mode-down threshold are raindrop amounts, and the mode-up threshold (hereinafter referred to as UCL) and the mode-down threshold (hereinafter referred to as LCL) are set as values where UCL is larger than LCL as shown in FIG. Has been. 8 indicates the raindrop amount determined by the raindrop
上述した払拭モード判定処理を行う場合、UCLを小さくすることは、より少ない雨滴量でモードアップするように変える、つまりモードアップし易くすることになる。言い換えると、雨滴量に対する感度を高めることになる。一方、LCLを小さくすることは、より少ない雨滴量でモードダウンするように変える、つまりモードダウンし難くする、あるいは現状の払拭モードを維持し易くすることになる。言い換えると、やはり雨滴量に対する感度を高めることになる。本発明の一実施形態による車両用ワイパー制御装置1においては、自動車100の前方に先行車両があり且つそれに起因するスプラッシュを受けている場合は、UCLおよびLCLをより小さく切り替えて、モードアップし易くするとともにモードダウンし難くして、ワイパー装置10による払拭動作頻度を高めるようにしている。
When performing the wiping mode determination process described above, reducing the UCL makes it easier to change the mode with a smaller amount of raindrops, that is, to make the mode easier. In other words, it increases the sensitivity to the amount of raindrops. On the other hand, reducing the LCL changes the mode to be reduced with a smaller amount of raindrops, that is, makes it difficult for the mode to be reduced, or facilitates maintaining the current wiping mode. In other words, it also increases the sensitivity to the amount of raindrops. In the vehicle
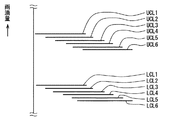
本発明の一実施形態による車両用ワイパー制御装置1においては、UCLおよびLCLをそれぞれ6段階設定している。すなわち、UCLとして、図9に示すように、雨滴量が大きいほうから順にUCL1、UCL2、UCL3、・・・UCL6を設定している。同様に、LCLとして、図9に示すように、雨滴量が大きいほうから順にLCL1、LCL2、LCL3、・・・LCL6を設定している。UCLとLCLの組み合わせを6種類設定している。すなわち、UCL1およびLCL1のペアを閾値Pとし、UCL2およびLCL2のペアを閾値Qとし、UCL3およびLCL3のペアを閾値Rとし、UCL4およびLCL4のペアを閾値Sとし、UCL5およびLCL5のペアを閾値Tとし、UCL6およびLCL6のペアを閾値Wとしている。払拭モード判定に用いる雨滴量閾値としては、閾値Pから閾値Q、閾値Rと切り替えるに連れて、よりモードアップし易くなる。
In the vehicle
本発明の一実施形態による車両用ワイパー制御装置1において用いられている閾値選定マップは、図7に示すように、縦軸方向に自動車100の車速により区分され、横軸方向に、先行車両の有無および先行車両との車間距離により区分されたマトリクス表として構成されている。本発明の一実施形態による車両用ワイパー制御装置1において用いられている閾値選定マップでは、フロントウィンドシールドへの降雨状態、つまり雨滴付着状態が安定しているときに、払拭モード判定の感度がもっとも低い、つまり払拭モードがモードアップし難いような閾値が選択され、フロントウィンドシールドへの雨滴付着状態が不安定となり勝ちな条件が強まるに連れて、払拭モード判定の感度が高まるように、つまりモードアップしやすいような閾値が選択されるように構成されている。具体的には、先行車両無しよりも有りの方が、車速が低速よりも高速の方が、また、車間距離が短い方が、より小さいUCLおよびLCLが選択されるようになっている。
As shown in FIG. 7, the threshold selection map used in the vehicle
図6に示す閾値選定処理のフローチャートにおいて、ステップ201で先行車両無しの判定が下されると、図7に示す閾値選定マップ中の、先行車両無しの列が選択され、続いて車速に対応した行が選択されて、UCLとLCLのペアが決定される。ステップ201で先行車両有りの判定が下され且つステップ203で降雨遮断環境ではないとの判定が下されると、図7に示す閾値選定マップ中の、先行車両有りの複数の列の中からそのときの車間距離に対応した列が選択され、次に車速に対応した行が選択されて、UCLとLCLのペアが決定される。一方、ステップ203で降雨遮断環境であるとの判定が下されると、図7に示す閾値選定マップ中の、先行車両無しの列が選択され、続いて車速に対応した行が選択されて、UCLとLCLのペアが決定される。降雨遮断環境下を走行する場合は、先行車両があっても路面上に雨水が溜まっていないのでスプラッシュが発生しない。したがって、先行車両無しの列から閾値を選択して問題ない。
In the threshold selection process flowchart shown in FIG. 6, when it is determined in
本発明の一実施形態による車両用ワイパー制御装置1における閾値選定マップでは、自動車100の走行速度が高くなるに連れて、先行車両との車間距離が小さくなるに連れて、言い換えると、フロントウィンドシールド101へのスプラッシュ付着量が多く且つ不安定になるに連れて、閾値P→閾値Q→閾値R→閾値S→閾値T→閾値Wの順番でより小さいUCLおよびLCLのペア閾値が選択されるように設定されている。
In the threshold selection map in the vehicle
次に、図5のフローチャート中のステップ105における払拭モード判定処理の具体的な流れについて、図10に示すようなフローチャートに基づいて説明する。図10のフローチャートは、理解し易さのために、図6の閾値選定処理のフローチャートの一部を含んでいる。
Next, a specific flow of the wiping mode determination process in
払拭モード判定処理が開始されると、先ず、ステップ301で、自動車100の前方に先行車両があるかどうかを判定する。先行車両が無い場合は、ステップ319へ進み、「先行車両無し」条件で閾値選定マップを参照し、そのときの車速に基づいて払拭モード判定に用いるモードアップ閾値およびモードダウン閾値を選定する。先行車両がある場合は、続くステップ302へ進み、自動車100が降雨遮断環境下を走行中であるかどうかを判定する。自動車100の走行環境が降雨遮断環境ではない場合は、続くステップ303へ進み、「先行車両あり」条件で閾値選定マップを参照し、そのときの車速および先行車両との車間距離に基づいてモードアップ閾値およびモードダウン閾値を選定する。一方、自動車100の走行環境が降雨遮断環境である場合は、ステップ319へ進み、「先行車両無し」条件で閾値選定マップを参照し、そのときの車速に基づいて払拭モード判定に用いるモードアップ閾値およびモードダウン閾値を選定する。
When the wiping mode determination process is started, first, in
続いて、ステップ304で、雨滴量がUCLを超えるかどうか判断する。雨滴量がUCLを超える場合は、ステップ305へ進み、連続UCLカウンタ値を一つ進める。続いて、ステップ306で、連続UCLカウンタ値がモードアップ回数閾値m以上かどうか判断する。ステップ306の判定の結果、連続UCLカウンタ値がモードアップ回数閾値m以上であるときは、ステップ307へ進み払拭モードをモードアップする。続いて、ステップ308へ進み連続UCLカウンタ値を初期化し、ステップ301から繰り返す。
Subsequently, in
ステップ304の判定の結果、雨滴量がUCL閾値未満の場合は、ステップ311へ進み、雨滴量がLCL以上であるかどうかを判定する。雨滴量がLCL以上である場合は、ステップ312へ進み現状の払拭モードを保持し、続いてステップ336へ進み連続UCLカウンタ値および連続LCLカウンタ値を初期化し、ステップ301から繰り返す。
If the result of determination in
ステップ306の判断の結果、連続UCLカウンタ値がモードアップ回数閾値m未満であるときは、ステップ309へ進み現状の払拭モードを保持し、続いてステップ310へ進み連続LCLカウンタ値を初期化し、ステップ301から繰り返す。
If the result of determination in
ステップ311の判定の結果、雨滴量がLCL未満である場合はステップ313へ進み、連続LCLカウンタを一つ進める。続いてステップ314へ進み、連続LCLカウンタ値がモードダウン回数閾値n以上かどうか判断する。ステップ314の判定の結果、連続LCLカウンタ値がモードダウン回数閾値n未満の場合は、ステップ315で現状の払拭モードを保持し、ステップ316で連続UCLカウンタを初期化し、ステップ301から繰り返す。
If the result of determination in
ステップ314の判定の結果、連続LCLカウンタ値がモードダウン回数閾値n以上の場合は、ステップ317で払拭モードをモードダウンし、ステップ318で連続LCLカウンタを初期化し、ステップ301から繰り返す。
If the result of determination in
ステップ301の判定の結果、自動車100前方に先行車両がいない場合、およびステップ302の判定の結果、自動車100の走行環境が降雨遮断環境である場合、の2つのケースでは、いずれの場合もステップ319において「先行車両無し」条件にて閾値選定マップを参照し、そのときの車速に基づいて払拭モード判定に用いるモードアップ閾値およびモードダウン閾値を選定する。続いて、ステップ320へ進み、雨滴量がUCL以上であるかどうか判定する。雨滴量がUCL以上である場合は、ステップ321へ進み、連続UCLカウンタを一つ進める。続いて、ステップ322で連続UCLカウンタ値がモードアップ回数閾値m以上かどうか判断する。ステップ322の判定の結果、連続UCLカウンタ値がモードアップ回数閾値m以上であるときは、ステップ323へ進み払拭モードをモードアップする。続いて、ステップ324へ進み連続UCLカウンタ値を初期化し、ステップ301から繰り返す。
As a result of the determination in
ステップ320の判定の結果、雨滴量がUCL未満の場合は、ステップ327へ進み、雨滴量がLCL以上であるかどうかを判定する。雨滴量がLCL以上である場合は、ステップ328へ進み現状の払拭モードを保持し、続いてステップ329へ進み連続UCLカウンタ値および連続LCLカウンタ値を初期化し、ステップ301から繰り返す。
If the result of determination in
ステップ322の判定の結果、連続UCLカウンタ値がモードアップ回数閾値m未満であるときは、ステップ325へ進み現状の払拭モードを保持し、続いてステップ326へ進み連続LCLカウンタ値を初期化し、ステップ301から繰り返す。
If the result of determination in
ステップ327の判定の結果、雨滴量がLCL未満である場合は、ステップ330へ進み、連続LCLカウンタを一つ進める。続いてステップ331へ進み、連続LCLカウンタ値がモードダウン回数閾値n以上かどうか判定する。ステップ331の判定の結果、連続LCLカウンタ値がモードダウン回数閾値n未満の場合は、ステップ332で現状の払拭モードを保持し、ステップ333で連続UCLカウンタを初期化し、ステップ301から繰り返す。
If the result of determination in
ステップ331の判定の結果、連続LCLカウンタ値がモードダウン回数閾値nを超える場合は、ステップ334で払拭モードをモードダウンし、ステップ335で連続LCLカウンタを初期化し、ステップ301から繰り返す。
If the result of determination in
以上説明した、本発明の一実施形態による車両用ワイパー制御装置1では、自動車100前方の物体有無および物体までの距離を検出するレーザレーダ装置40、走行速度を検出する速度センサ60、自動車100の位置を検出するナビゲーションシステム70を備え、雨滴センサ20からの検出信号に基づいて判定された雨滴量と協働して払拭モードを判定するモードアップ閾値、モードダウン閾値、モードアップ回数閾値およびモードダウン回数閾値の少なくとも一つを、上述した3つのセンサ等から得られる情報である車速情報、先行車両の有無および車間距離情報、降雨遮断情報に基づいて可変するような閾値調整制御を行っている。そして、この閾値調整制御は、コントローラ50がレーザレーダ装置40からの検出信号に基づいて自車前方に先行車両有りと判定したときに、車間距離が短いほど、モードアップ閾値およびモードダウン閾値をより小さく設定するようにしている。
In the vehicle
降雨時に自車前方を先行車両が走行しているときは、降雨に加えて先行車両が跳ね上げたスプラッシュまでもが自車のフロントウィンドシールドに付着することになる。すなわち、フロントウィンドシールドへの水滴付着度合いが高まる。しかし、スプラッシュの付着量は路面条件等の影響で変動する。このため、雨滴センサにより検出した雨滴量のみに基づいて払拭モードを判定する従来のやり方では、払拭モードが頻繁に切り替わるためワイパーの動きが不安定に感じられる恐れがあった。運転者がしたがって、良好な前方視界を確保するためは、ワイパー装置10の往復払拭動作頻度を高めることが効果的であり、通常よりも早めに払拭モードをモードアップする、あるいは、通常よりも遅めに払拭モードをモードダウンするのが望ましい。
When the preceding vehicle is traveling in front of the host vehicle during rain, even the splash that the preceding vehicle jumps up in addition to the rain adheres to the front windshield of the host vehicle. That is, the degree of water droplet adhesion to the front windshield increases. However, the amount of splash adhesion varies due to the influence of road surface conditions and the like. For this reason, in the conventional method of determining the wiping mode based only on the raindrop amount detected by the raindrop sensor, the wiping mode is frequently switched, so that the movement of the wiper may be felt unstable. Therefore, in order for the driver to secure a good forward field of view, it is effective to increase the frequency of the reciprocating wiping operation of the
そこで、本発明の一実施形態による車両用ワイパー制御装置1では、自車前方に先行車両があることを検出すると、自車の走行速度および自車と先行車両との車間距離に基づいて閾値調整制御を行うことにより、払拭モードを通常より早めにモードアップする、あるいは通常よりも遅めにモードダウンする等して、フロントウィンドシールドに付着した雨滴やスプラッシュを素早く確実に除去できるようにしている。すなわち、自車のフロントウィンドシールドへの雨滴やスプラッシュの付着量の変動に影響を及ぼす状況の変化を検出し、それに基づいてワイパー装置の払拭動作を制御している。これにより、ワイパー装置の払拭動作を、常にフロントウィンドシールドへの雨滴やスプラッシュ付着状況に適したものに制御すると同時に、ワイパー装置の払拭動作を安定したものとすることができる。したがって、常に良好な前方視界を維持できるとともに、ワイパー装置の払拭動作を安定させることが可能な車両用ワイパー制御装置を提供することができる。
Therefore, in the vehicle
なお、以上説明した本発明の一実施形態による車両用ワイパー制御装置1においては、閾値調整制御時に、UCLおよびLCLの両方をペアで変更しているが、UCLおよびLCLのどちらか一方のみを変更するようにしてもよい。
In the vehicle
また、以上説明した本発明の一実施形態による車両用ワイパー制御装置1においては、閾値調整制御時にUCLおよびLCLを変更し、モードアップ回数閾mおよびモードダウン回数閾値nは変更していないが、UCLおよびLCLの少なくとも一方を変更し同時にモードアップ回数閾mおよびモードダウン回数閾値nの少なくとも一方を変更するようにしてもよい。すなわち、先行車両がありフロントウィンドシールドにスプラッシュが付着し易い状況になるに連れてモードアップ回数閾値mを小さくすれば、よりモードアップし易くなる。また、先行車両がありフロントウィンドシールドにスプラッシュが付着し易い状況になるに連れてモードダウン回数閾値nを大きくすれば、よりモードダウンし難くなる。これにより、払拭モードを通常より早めにモードアップする、あるいは通常よりも遅めにモードダウンする等して、フロントウィンドシールドに付着した雨滴やスプラッシュを素早く確実に除去できるようになる。また、閾値調整制御時に、UCLおよびLCLは変更せずに、モードアップ回数閾mおよびモードダウン回数閾値nの少なくとも一方を変更するようにしてもよい。
Further, in the vehicle
また、以上説明した本発明の一実施形態による車両用ワイパー制御装置1では、自動車100の前方の先行車両を検出するための前方物体検出手段としてレーザレーダ装置40を採用している。しかし、前方物体検出手段をレーザレーダ装置40に限定する必要はなく、他の種類の検出手段を用いてもよい。たとえば、超音波式レーダ装置、赤外線式レーダ装置等であってもよい。
In the vehicle
また、以上説明した本発明の一実施形態による車両用ワイパー制御装置1では、降雨遮断判定手段としてナビゲーションシステム70を用いているが、ナビゲーションシステム70に限定する必要は無い。他の手段、たとえば自動車100が備える灯火の自動点灯制御に用いられる自車前方の明るさを検出する前方照度センサや自車上方の明るさを検出する上方照度センサ等を用いてもよい。
Moreover, in the vehicle
1 車両用ワイパー制御装置
10 ワイパー装置
11 ワイパーモータ
12 伝達機構
13 ワイパーブレード
20 雨滴センサ
21 発光素子
22 受光素子
23 プリズム
24 ケーシング
30 ワイパーコントロールスイッチ
40 レーザレーダ装置(前方物体検出手段)
50 コントローラ
51 払拭モード判定部
52 雨滴量判定部
53 前方距離算出手段、前方距離変化率算出手段
54 速度判定部
55 降雨遮断判定部
60 速度センサ
70 ナビゲーションシステム(降雨遮断判定手段)
80 イグニッションスイッチ
90 バッテリ
100 自動車
101 フロントウィンドシールド(ウィンドシールド)
A 払拭領域
Ad 検出領域
D 雨滴
t1、t2 時刻
DESCRIPTION OF
DESCRIPTION OF
80
A Wiping area Ad detection area D Raindrop t1, t2 Time
Claims (4)
前記ウィンドシールド上における前記ワイパーブレードの払拭範囲内に設定された検出領域に付着した水滴量に応じた雨滴信号を出力する雨滴センサと、
前記雨滴センサからの前記雨滴信号が入力されて雨滴量を算出するとともに算出した前記雨滴量に基づいて前記ワイパー装置へ駆動信号を出力するコントローラと、を備え、
前記コントローラは、前記ワイパーブレードの往復払拭動作間隔時間であるワイパー停止期間中に検出された前記雨滴信号を積分して前記雨滴量を算出する雨滴量判定部と、前記雨滴量判定部で算出された前記雨滴量に基づいて次回の往復払拭動作間隔時間である払拭モードを判定し且つ判定された前記払拭モードで前記ワイパーブレードに払拭動作をさせるように前記ワイパー装置に駆動信号を出力する払拭モード判定部と、を備え、
前記払拭モード判定部は、前記雨滴量判定部で判定された前記雨滴量がモードダウン閾値以上モードアップ閾値以下であるときあるいは前記雨滴量判定部で判定された前記雨滴量が前記モードアップ閾値より大きいとの判定が連続して繰り返された回数がモードアップ閾値回数未満であるときあるいは前記雨滴量判定部で判定された前記雨滴量が前記モードダウン閾値より小さいとの判定が連続して繰り返された回数がモードダウン閾値回数未満であるときにはその時点で選定されている前記払拭モードを維持し、前記雨滴量判定部で判定された前記雨滴量が前記モードアップ閾値より大きいときあるいは前記雨滴量判定部で判定された前記雨滴量が前記モードアップ閾値より大きいとの判定が連続してモードアップ閾値回数だけ繰り返されたときにはその時点で選定されている前記払拭モードよりも前記ワイパーブレードの往復払拭動作間隔時間がより短い前記払拭モードへモードアップし、前記雨滴量判定部で判定された前記雨滴量が前記モードダウン閾値より小さいときあるいは前記雨滴量判定部で判定された前記雨滴量が前記モードダウン閾値より小さいとの判定が連続してモードダウン閾値回数だけ繰り返されたときにはその時点で選定されている前記払拭モードよりも前記ワイパーブレードの往復払拭動作間隔時間がより長い前記払拭モードへモードダウンする車両用ワイパー制御装置であって、
車両用ワイパー制御装置が搭載された車両である自車の走行速度を検出する速度センサと、
前記自車の進行方向前方にある物体を検出する前方物体検出手段と、
前記コントローラ内に設けられて前記前方物体検出手段からの検出信号に基づいて前記自車と前記物体との距離である前方距離を算出する前方距離算出手段と、を備え、
前記コントローラは、前記速度センサからの検出信号に基づいて算出された前記自車の前記走行速度および前記前方物体検出手段からの検出信号に基づいて算出された前記前方距離に基づいて前記モードアップ閾値、前記モードダウン閾値、前記モードアップ回数閾値および前記モードダウン回数閾値の少なくとも一つを可変するような閾値調整制御を行うことを特徴とする車両用ワイパー制御装置。 A wiper device that moves the wiper blade to wipe off water droplets adhering to the windshield; and
A raindrop sensor that outputs a raindrop signal corresponding to the amount of waterdrop attached to the detection area set within the wiping range of the wiper blade on the windshield;
A controller that calculates the amount of raindrops when the raindrop signal from the raindrop sensor is input and outputs a drive signal to the wiper device based on the calculated amount of raindrops,
The controller is calculated by a raindrop amount determining unit that calculates the raindrop amount by integrating the raindrop signal detected during a wiper stop period that is a reciprocating wiping operation interval time of the wiper blade, and the raindrop amount determining unit. A wiping mode that determines a wiping mode that is the next reciprocating wiping operation interval time based on the raindrop amount and outputs a drive signal to the wiper device so that the wiper blade performs a wiping operation in the determined wiping mode A determination unit;
The wiping mode determination unit is configured such that when the raindrop amount determined by the raindrop amount determination unit is greater than or equal to a mode-down threshold value and less than or equal to a mode-up threshold value, or the raindrop amount determined by the raindrop amount determination unit is greater than the mode-up threshold value. When the number of times that the determination of being large is continuously repeated is less than the number of mode-up thresholds, or the determination that the raindrop amount determined by the raindrop amount determination unit is smaller than the mode-down threshold is continuously repeated. When the number of times is less than the number of mode-down thresholds, the wiping mode selected at that time is maintained, and when the raindrop amount determined by the raindrop amount determination unit is greater than the mode-up threshold or the raindrop amount determination The determination that the amount of raindrops determined by the unit is greater than the mode-up threshold is continuously repeated as many times as the mode-up threshold. Sometimes the mode of the wiper blade is set to the wiping mode in which the reciprocating wiping operation interval time of the wiper blade is shorter than the wiping mode selected at that time, and the raindrop amount determined by the raindrop amount determination unit is the mode-down threshold value. When the determination that the raindrop amount determined by the raindrop amount determination unit is smaller than the mode-down threshold value is repeated continuously by the number of times of the mode-down threshold value, the wiping mode selected at that time is selected. And a wiper control device for a vehicle that mode-downs to the wiping mode with a longer reciprocating wiping operation interval time of the wiper blade,
A speed sensor that detects a traveling speed of the vehicle that is a vehicle equipped with a vehicle wiper control device;
Forward object detection means for detecting an object in front of the traveling direction of the host vehicle;
Forward distance calculating means provided in the controller for calculating a forward distance that is a distance between the host vehicle and the object based on a detection signal from the forward object detecting means;
The controller includes the mode-up threshold value based on the traveling speed calculated based on a detection signal from the speed sensor and the front distance calculated based on a detection signal from the front object detection means. A vehicle wiper control device that performs threshold adjustment control to vary at least one of the mode-down threshold, the mode-up number threshold, and the mode-down number threshold.
前記コントローラは、前記降雨遮断判定手段からの検出信号に基づいて前記自車への降雨が遮断されると判定したときに前記閾値調整制御を中止し且つ前記降雨遮断判定手段からの検出信号に基づいて前記自車への降雨が遮断されないと判定したときに前記閾値調整制御を実行することを特徴とする請求項1または請求項2のどちらか一つに記載の車両用ワイパー制御装置。 A rain interception judging means for judging whether or not the rain on the own vehicle is interrupted;
The controller stops the threshold adjustment control when it is determined that the rain on the host vehicle is blocked based on the detection signal from the rain interception determination means, and based on the detection signal from the rain interception determination means 3. The vehicle wiper control device according to claim 1, wherein the threshold adjustment control is executed when it is determined that the rain on the vehicle is not blocked. 4.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008220208A JP5067318B2 (en) | 2008-08-28 | 2008-08-28 | Wiper control device for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008220208A JP5067318B2 (en) | 2008-08-28 | 2008-08-28 | Wiper control device for vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010052601A true JP2010052601A (en) | 2010-03-11 |
| JP5067318B2 JP5067318B2 (en) | 2012-11-07 |
Family
ID=42068976
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008220208A Expired - Fee Related JP5067318B2 (en) | 2008-08-28 | 2008-08-28 | Wiper control device for vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5067318B2 (en) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012046138A (en) * | 2010-08-30 | 2012-03-08 | Denso Corp | Wiper controller |
| JP2013139187A (en) * | 2011-12-29 | 2013-07-18 | Denso Corp | Wiper controller |
| JP2013184491A (en) * | 2012-03-06 | 2013-09-19 | Nissan Motor Co Ltd | Vehicle traveling support device |
| JP2014525867A (en) * | 2011-07-21 | 2014-10-02 | ヴァレオ ビジョン | Method for controlling a functional member of a vehicle |
| JP2014531576A (en) * | 2011-09-07 | 2014-11-27 | ヴァレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハー | Method and camera assembly for detecting raindrops on a vehicle windshield |
| CN107878400A (en) * | 2017-11-28 | 2018-04-06 | 东南(福建)汽车工业有限公司 | A kind of intelligence control system and control method of wiper fast mode |
| CN111860127A (en) * | 2020-06-05 | 2020-10-30 | 北京嘀嘀无限科技发展有限公司 | Vehicle detection method and system, computer readable storage medium |
| JP2021096070A (en) * | 2019-12-13 | 2021-06-24 | 株式会社デンソー | Object detection device and control method of object detection device |
| CN114670787A (en) * | 2022-03-07 | 2022-06-28 | 岚图汽车科技有限公司 | Vehicle, control method of windscreen wiper and related equipment |
| CN115147689A (en) * | 2021-03-29 | 2022-10-04 | 本田技研工业株式会社 | Identification device, vehicle system, identification method, and storage medium |
| WO2024124551A1 (en) * | 2022-12-16 | 2024-06-20 | 宁德时代(上海)智能科技有限公司 | Reliability testing method for electric assembly, and related apparatus and storage medium |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104535537A (en) * | 2014-07-28 | 2015-04-22 | 魏磊 | Ship control device based on gas analysis |
| CN104122232B (en) * | 2014-07-28 | 2016-06-08 | 烟台烟大众智知识产权服务有限公司 | ship control device based on gas analysis |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6271071U (en) * | 1985-10-24 | 1987-05-06 | ||
| JPH10138877A (en) * | 1996-11-11 | 1998-05-26 | Honda Motor Co Ltd | Wiper controller for vehicle |
| JPH10236246A (en) * | 1997-02-27 | 1998-09-08 | Sony Corp | Control method, navigation device and automobile |
| JP2006021623A (en) * | 2004-07-07 | 2006-01-26 | Denso Corp | Wiper control system |
-
2008
- 2008-08-28 JP JP2008220208A patent/JP5067318B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6271071U (en) * | 1985-10-24 | 1987-05-06 | ||
| JPH10138877A (en) * | 1996-11-11 | 1998-05-26 | Honda Motor Co Ltd | Wiper controller for vehicle |
| JPH10236246A (en) * | 1997-02-27 | 1998-09-08 | Sony Corp | Control method, navigation device and automobile |
| JP2006021623A (en) * | 2004-07-07 | 2006-01-26 | Denso Corp | Wiper control system |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012046138A (en) * | 2010-08-30 | 2012-03-08 | Denso Corp | Wiper controller |
| JP2014525867A (en) * | 2011-07-21 | 2014-10-02 | ヴァレオ ビジョン | Method for controlling a functional member of a vehicle |
| JP2014531576A (en) * | 2011-09-07 | 2014-11-27 | ヴァレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハー | Method and camera assembly for detecting raindrops on a vehicle windshield |
| JP2013139187A (en) * | 2011-12-29 | 2013-07-18 | Denso Corp | Wiper controller |
| JP2013184491A (en) * | 2012-03-06 | 2013-09-19 | Nissan Motor Co Ltd | Vehicle traveling support device |
| CN107878400A (en) * | 2017-11-28 | 2018-04-06 | 东南(福建)汽车工业有限公司 | A kind of intelligence control system and control method of wiper fast mode |
| JP7487470B2 (en) | 2019-12-13 | 2024-05-21 | 株式会社デンソー | OBJECT DETECTION DEVICE AND METHOD FOR CONTROLLING OBJECT DETECTION DEVICE |
| JP2021096070A (en) * | 2019-12-13 | 2021-06-24 | 株式会社デンソー | Object detection device and control method of object detection device |
| CN111860127A (en) * | 2020-06-05 | 2020-10-30 | 北京嘀嘀无限科技发展有限公司 | Vehicle detection method and system, computer readable storage medium |
| CN115147689A (en) * | 2021-03-29 | 2022-10-04 | 本田技研工业株式会社 | Identification device, vehicle system, identification method, and storage medium |
| CN114670787B (en) * | 2022-03-07 | 2023-10-20 | 岚图汽车科技有限公司 | Control method of vehicle and windscreen wiper and related equipment |
| CN114670787A (en) * | 2022-03-07 | 2022-06-28 | 岚图汽车科技有限公司 | Vehicle, control method of windscreen wiper and related equipment |
| WO2024124551A1 (en) * | 2022-12-16 | 2024-06-20 | 宁德时代(上海)智能科技有限公司 | Reliability testing method for electric assembly, and related apparatus and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5067318B2 (en) | 2012-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5067318B2 (en) | Wiper control device for vehicle | |
| JP4389700B2 (en) | Wiper control device | |
| US9821771B2 (en) | Control device for a vehicle, storage medium of control program for vehicle, and vehicle | |
| JP4905097B2 (en) | Raindrop detector | |
| US7772793B2 (en) | Raindrop detecting device and method of selecting wiping mode for vehicle | |
| JP4175266B2 (en) | Wiper device | |
| JP4466537B2 (en) | Wiper control device for vehicle | |
| KR102558694B1 (en) | Rain sensor, car and method for controlling of car using the same | |
| JP2008250904A (en) | Traffic lane division line information detecting device, travel traffic lane maintaining device, and traffic lane division line recognizing method | |
| CN104842943A (en) | Controller for automobile rear window wiper and control system and method | |
| CN104842875A (en) | Apparatus and method for generating image to be displayed | |
| US20120216830A1 (en) | Windshield washer device and method for operating such a windshield wiper device | |
| JP4935706B2 (en) | Raindrop detector | |
| JP4656439B2 (en) | WINKER CONTROL DEVICE FOR VEHICLE | |
| JP4257278B2 (en) | Auto light control device for vehicle | |
| JP2020075537A (en) | Wiper device | |
| JP2011168090A (en) | Wiper control device | |
| JP4862766B2 (en) | Wiper control device | |
| JP2018127063A (en) | Wiper drive control device, wiper drive control method, and computer program | |
| JP6036566B2 (en) | Control device | |
| JP5861584B2 (en) | Fluctuation determination device | |
| JP2010247654A (en) | Rear wiper control device | |
| JP4259915B2 (en) | WIPER CONTROL METHOD AND WIPER CONTROL DEVICE | |
| JP2009255710A (en) | Wiper control device for vehicle | |
| JP4844508B2 (en) | Raindrop detector |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120424 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120427 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120622 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120717 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120730 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150824 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5067318 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150824 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |