JP2010044091A - パターン検査装置および方法 - Google Patents
パターン検査装置および方法 Download PDFInfo
- Publication number
- JP2010044091A JP2010044091A JP2009261499A JP2009261499A JP2010044091A JP 2010044091 A JP2010044091 A JP 2010044091A JP 2009261499 A JP2009261499 A JP 2009261499A JP 2009261499 A JP2009261499 A JP 2009261499A JP 2010044091 A JP2010044091 A JP 2010044091A
- Authority
- JP
- Japan
- Prior art keywords
- pattern
- inspection target
- image
- edge
- target pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000007689 inspection Methods 0.000 title claims abstract description 393
- 238000000034 method Methods 0.000 title claims abstract description 189
- 239000002245 particle Substances 0.000 claims abstract description 36
- 238000004519 manufacturing process Methods 0.000 claims abstract description 21
- 238000005259 measurement Methods 0.000 abstract description 33
- 238000012360 testing method Methods 0.000 abstract description 15
- 230000005855 radiation Effects 0.000 abstract 1
- 230000007547 defect Effects 0.000 description 74
- 238000010586 diagram Methods 0.000 description 52
- 238000003708 edge detection Methods 0.000 description 28
- 238000011156 evaluation Methods 0.000 description 27
- 239000013598 vector Substances 0.000 description 27
- 238000013461 design Methods 0.000 description 25
- 235000012431 wafers Nutrition 0.000 description 25
- 230000008569 process Effects 0.000 description 24
- 238000012545 processing Methods 0.000 description 24
- 238000010894 electron beam technology Methods 0.000 description 20
- 239000000523 sample Substances 0.000 description 17
- 238000005070 sampling Methods 0.000 description 13
- 238000004364 calculation method Methods 0.000 description 9
- 230000005484 gravity Effects 0.000 description 9
- 230000003287 optical effect Effects 0.000 description 9
- 238000007639 printing Methods 0.000 description 9
- 238000001514 detection method Methods 0.000 description 8
- 238000009826 distribution Methods 0.000 description 8
- 238000009499 grossing Methods 0.000 description 8
- 238000012937 correction Methods 0.000 description 7
- 230000002950 deficient Effects 0.000 description 7
- 230000000694 effects Effects 0.000 description 7
- 238000003860 storage Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 238000001459 lithography Methods 0.000 description 5
- 230000009466 transformation Effects 0.000 description 5
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 4
- 208000032005 Spinocerebellar ataxia with axonal neuropathy type 2 Diseases 0.000 description 4
- 208000033361 autosomal recessive with axonal neuropathy 2 spinocerebellar ataxia Diseases 0.000 description 4
- 238000007726 management method Methods 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 4
- 238000004088 simulation Methods 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 238000010884 ion-beam technique Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000007261 regionalization Effects 0.000 description 3
- 230000008719 thickening Effects 0.000 description 3
- 0 *CC1CCCC1 Chemical compound *CC1CCCC1 0.000 description 2
- 230000002457 bidirectional effect Effects 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000006731 degradation reaction Methods 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000002372 labelling Methods 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000007781 pre-processing Methods 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 230000009897 systematic effect Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000001627 detrimental effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000002068 genetic effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- OOYGSFOGFJDDHP-KMCOLRRFSA-N kanamycin A sulfate Chemical group OS(O)(=O)=O.O[C@@H]1[C@@H](O)[C@H](O)[C@@H](CN)O[C@@H]1O[C@H]1[C@H](O)[C@@H](O[C@@H]2[C@@H]([C@@H](N)[C@H](O)[C@@H](CO)O2)O)[C@H](N)C[C@@H]1N OOYGSFOGFJDDHP-KMCOLRRFSA-N 0.000 description 1
- 238000001000 micrograph Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000000877 morphologic effect Effects 0.000 description 1
- 238000013041 optical simulation Methods 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 239000011368 organic material Substances 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 238000010422 painting Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000003908 quality control method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 238000003892 spreading Methods 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images

















































Landscapes
- Analysing Materials By The Use Of Radiation (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
Abstract
【解決手段】検査対象パターン画像と検査対象パターンを製造するために使用するデータを用いて検査するパターン検査装置であって、データから線分もしくは曲線で表現された基準パターンを生成する生成手段と、検査対象パターンに荷電粒子線を走査して検査対象パターン画像を生成し、検査対象パターン画像の画素の位置を置き換えることで回転した画像を取得する生成手段と、検査対象パターン画像のエッジを検出する手段と、検査対象パターン画像のエッジと線分もしくは曲線で表現された基準パターンとを比較することにより、検査対象パターンを検査する検査手段とを備える。
【選択図】図75
Description
また、設計データに対するパターン変形量を求めることにより、回路設計上の技術を向上させることがますます重要になっている。
この要請に応じて、走査型電子顕微鏡を用い、電子線(荷電粒子線)のすべての走査方向を一定にして自動計測をする方法が実施されている。しかしながら、この方法では、線分の方向によって計測誤差が発生していた。そのために本発明は、基準パターンを活用して基準データをもとにして各種の計測条件を自動設定することができるパターン検査装置および方法を提供することを目的とする。
本発明の好ましい態様は、請求項4に記載のパターン検査装置において、前記検査対象パターン画像を生成する生成手段は、前記検査対象パターン画像のエッジを検出するのに使用する部分以外を走査しないことにより、検査対象パターンが存在するサンプルのチャージアップによる前記検査対象パターン画像の変形を低減することを特徴とする。
本発明の第6の態様は、検査対象パターン画像と前記検査対象パターンを製造するために使用するデータを用いて検査するパターン検査方法であって、前記データから線分もしくは曲線で表現された基準パターンを生成し、前記検査対象パターンに荷電粒子線を走査して前記検査対象パターン画像を生成し、前記検査対象パターン画像のエッジを検出し、前記検査対象パターン画像のエッジと前記線分もしくは曲線で表現された基準パターンとを比較することにより、前記検査対象パターンを検査し、前記検査対象パターン画像の生成で、前記検査対象パターン画像のエッジを検出するのに使用する部分を前記荷電粒子線で走査し、前記検査対象パターン画像のエッジを検出するのに使用する部分以外の部分を走査せずに前記検査対象パターン画像を生成することを特徴とする。
前記検査対象パターン画像を生成する生成手段は、前記基準パターンの線幅を使って、前記検査対象パターン画像の倍率が変わるように、走査条件を設定してもよい。
前記検査対象パターン画像を生成する生成手段は、前記基準パターンを使って前記荷電粒子線を走査する条件の一つである前記荷電粒子線の走査方向を設定してもよい。
前記荷電粒子線の走査方向は、前記荷電粒子線が前記検査対象パターンを構成する線分の方向のすべてにより垂直になる方向としてもよい。
前記荷電粒子線の走査方向は、縦線の前記検査対象パターンが存在する領域では横方向とし、横線の前記検査対象パターンが存在する領域では縦方向とし、縦線と横線の前記検査対象パターンが混在する領域では45度方向、−45度方向、45度方向の逆方向である−135度と、−45度方向の逆方向である135度のいずれかの方向としてもよい。
前記検査対象パターン画像を生成する生成手段は、複数の異なる前記走査方向を設定して、複数の前記検査対象パターン画像を生成し、前記エッジを検出する手段は、前記荷電粒子線が前記検査対象パターンのエッジにより垂直になる方向である走査方向で得られた前記検査対象パターン画像からエッジを検出してもよい。
前記荷電粒子線の走査方向は、縦線の前記検査対象パターンと横線の前記検査対象パターンが混在する領域では、縦方向と横方向の2方向とし、前記エッジを検出する手段は、前記基準パターンの縦線に対応する前記検査対象パターン画像のエッジを横方向の走査で得られた前記検査対象パターン画像から取得し、前記基準パターンの横線に対応する前記検査対象パターン画像のエッジを縦方向の走査で得られた前記検査対象パターン画像から検出してもよい。
(1)検査対象パターンの画像を得るために、最小限度の電子線(荷電粒子線)を走査すればよく、したがって最小の時間で検査対象パターンの画像を得ることができる。
(2)スキャン可能なエリアを最大限に活用して広範囲のブロックをできるだけ小さい数のブロックで実現し、更にスキャン方向に依存するエッジの検出精度の低下を基準パターンを使って最適な方法で取得することができる。
(3)ラスタースキャンが持っているデータの欠落部分を、波形を変えること、もしくは2回スキャンをする方法、もしくはフィルタをかける方法等で、X方向とY方向の画質の僅差を極力低減することが出来る。
(4)サンプルのチャージアップによるプロファイルの変形が低減でき、パターンの変形量の精度を向上する効果がある。また、全体をラスタースキャンをしてデータを取得するのではなく、計測に最も重要であるエッジ部分のみのスキャンを行うことによって、高速に画像を取得することができる。
(5)内挿による画質低下を伴わない回転画像を取得することができ、エッジの検出精度の低下を避けられる。
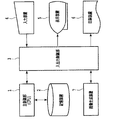
図1は、本発明のパターン検査装置における画像生成装置の基本構成を示す概略図である。本発明のパターン検査装置における画像生成装置7は、照射系装置310と試料室320と2次電子検出器330とから構成されている。照射系装置310は、電子銃311と、電子銃311から放出された1次電子を集束する集束レンズ312と、電子線(荷電粒子線)を偏向するX偏向器313およびY偏向器314と、対物レンズ315とから構成されている。試料室320はXYステージ321を備えている。試料室320にはウエーハ搬送装置340によって試料であるウエーハWが搬出入されるようになっている。照射系装置310においては、電子銃311から放出された1次電子は集束レンズ312で集束された後に、X偏向器313およびY偏向器314で偏向されつつ対物レンズ315により集束されて試料であるウエーハWの表面に照射される。
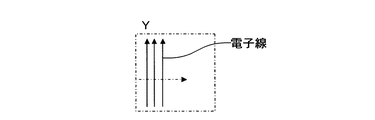
図6は、下から上方向に向かって縦方向(Y方向)のスキャンを行った場合の測定精度を説明するための図である。図6に示すように、縦方向のスキャンをした場合、横線についての測定精度は良好であるが、縦線については良好な測定精度が得られない。
図4における縦横のパターンがある左下のブロックB7においては、縦線と横線の両方について良好な測定精度を得ようとすると、図5に示す横方向のスキャンと図6に示す縦方向のスキャンの2回のスキャンを行わなければ良好な測定精度が得られない。その右隣に示す横線のみのブロックB8においては、図6に示す縦方向のスキャンのみを行えばよい。また、中段1番左に示す縦線のみのパターンのブロックB4においては、図5に示す横方向のスキャンのみを行えばよい。このように、横方向、縦方向にそれぞれスキャンを行う、あるいは横方向および縦方向2回のスキャンを行うという方法で、スキャンを制御して所望の画像を得るようにしている。
(スキャン1方式)0度、90度あるいは18度などの1方向のスキャン
(スキャン2方式)0度と−180度の交互のスキャン
(スキャン3方式)0度および90度の2方向のスキャンもしくは45度と−45度の2方向のスキャン
ここで、座標系は、X軸を右方向、Y方向を上方向に取り、検査すべきパターンの最頻度の方向を右方向(0度方向)にした座標系である。
エッジ方向については、実際得られた角度とプラス180度の2方向の解釈が可能となる。そこで、右手側がパターン内部になるような方向を定義することによって、一義的に方向を定める。この点について、図4を参照して説明すると、例えば、ブロックB4の位置では、上下に走るエッジが2本あるが、左側のエッジが90度、右側のエッジが270度と定義される。
次に、基準パターンと検査対象パターンとの比較をして、検査をする場合を説明する。
(スキャン1方式)1方向のスキャンと(スキャン2方式)交互のスキャンでは、1枚の画像からエッジを検出する。(スキャン3方式)2方向のスキャンでは、2枚の画像からエッジを検出し、そのエッジ情報を融合させる。0度および90度の2方向のスキャンの場合は、0度の画像から45度から135度と、225度から−45度の間のエッジのみを抽出し、90度の画像から135度から225度と、−45度から45度の間のエッジのみを抽出し、両者を合成して1画像から得られたエッジとして扱う。
45度および−45度の2方向のスキャンの場合は、45度の画像から90度から180度と270度から360度の間のエッジのみを抽出し、−45度の画像から0度から90度と180度から270度の間のエッジのみを抽出し、両者を合成して、1画像から得られたエッジとして扱う。
(スキャン1方式)1方向のスキャンでは、プロファイルは同一の画像から求める。
(スキャン2方式)0度、180度交互のスキャンでは右側のエッジ(180度から360度のエッジ)を得るプロファイルを0度の画像から、左側(0度から180度のエッジ)のエッジを得るプロファイルを180度の画像から求める。
(スキャン3方式)2方向のスキャンでは、45度から135度と、225度から−45度の間のエッジを得るプロファイルを0度の画像から、135度から225度と、−45度から45度の間のエッジを得るプロファイルを90度の画像から求める。
図74は、上述の具体的な例を示す図である。
そして、第2のエッジとシフトした第2の基準パターンのエッジとを比較することにより、検査対象パターンを検査する。この第2の検査においても、パターン変形量を求めたり、欠陥を検出したりする。パターン変形量の1つとしてシフト量S3が求まる。
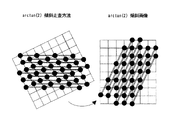
図75は45度の角度の場合を示すものであるが、図76は、arctan(2)の傾斜の走査方法および回転した画像を示す図である。
基幹データベース21を外部に設け、パターン検査装置がLANを経由して基幹データベース21にアクセスするようにしてもよい。
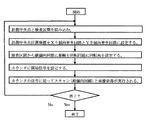
図13は、本実施形態におけるレシピ登録処理の例を示すフローチャートである。まず、オペレータは、入力装置4を介して基準パターン生成部11に、設計データ検索用パラメータ(ここでは、検査対象サンプルの品種、およびプロセスを指定するパラメータ)、検査モード、画像取得パラメータ(検査領域、画像サイズ、ピクセル数、ウエーハを特定するためのスロット番号、および光学系の調整パラメータ)、ならびにエッジ検出および検査のためのパラメータを入力する(ステップS202)。
(R1) 求めたいパターン変形量
(R2) 許容パターン変形量の−側の限界および+側の限界、ならびにエッジの許容方向差の限界
(R3) 画質から経験的に決められるエッジ検出パラメータ
(R4) パターンの属性(コーナー、直線部分、端点、孤立パターン等)を自動的に認識するための抽出ルール
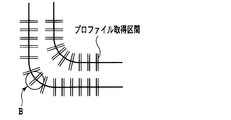
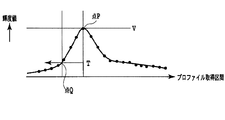
(R5) プロファイル取得区間の長さ、プロファイル取得区間とプロファイル取得区間との間隔、プロファイル取得区間内で輝度値を調べる間隔、およびプロファイルをとる方法(しきい値法を使うかなど)
(R6) プロファイル取得区間を可変にして測定時に決定するかどうかのフラグ
基準パターン生成部11は、設計データ検索用パラメータ(検査対象サンプルの品種、およびプロセス)をキーとして基幹データベース21を検索し、設計データを取り出す(ステップS204)。基幹データベース21は、検査対象パターン画像に対する設計データ(CADデータ)を格納したデータベースである。
検査対象パターン画像から検出されるエッジの位置に最も適したように設計データに対し、シュリンク処理(倍率を変える処理)、サイズ処理(線幅を変える処理)などを施す必要がある場合がある。また、第1のエッジ検出と第2のエッジ検出とでは一般的に検出するエッジの位置が異なるので、必要があれば、第1エッジ検出用、および第2エッジ検出用に基準パターンを2種類用意する。
画像生成装置7は、検査単位領域ごとに、検査対象パターン画像(およびその中心位置)を検査部12に出力する(ステップS308)。

また、基準パターンのエッジの位置によって重み付けを変えて行うようにすることができる。これは以下の手順で行われる。
シフト量S1は検査結果として、表示装置5および印刷装置6に出力することができる。
検査部12は、まず、検査対象パターン画像のエッジと基準パターンのエッジとの対応づけを行う(ステップS318)。
エッジの位置は、サブピクセル精度で扱われる。したがって、エッジ間の距離もサブピクセル精度で得られる。方向については、たとえば右方向を0度として0〜360度の値として決定される。
なお、対応づけの候補が複数存在する場合は、距離が小さく、方向差が小さい候補を優先して対応づける。
ここで使用するエッジは(スキャン1方式)から(スキャン3方式)に応じて得られたエッジを使用する。
(スキャン1方式)1方向のスキャンと(スキャン2方式)交互のスキャンでは、1枚の画像に対して当該の処理を施して、欠陥領域として認識する。(スキャン3方式)2方向のスキャンでは、2枚の画像に対して当該の処理を施し、得られた欠陥領域を重ね合わせた領域を欠陥領域として認識する。重ね合わせは通常OR処理を行うが、より欠陥検出を厳密にするためにAND処理を使用することもできる。
画像全体から得られるパターン変形量としては、例えば、位置ずれ量、倍率変動量、および線幅の太り量が考えられる。
検査項目は、上述のレシピ項目の(R1)求めたいパターン変形量に従い選択される。
本実施形態において、プロファイル取得区間を予め設定しておく場合には、上述のように、レシピ作成時に行う。この場合、上述のレシピ項目の(R6)プロファイル取得区間を可変にして測定時に決定するかどうかのフラグがオフとしてあり、プロファイル取得区間が、第2の基準パターンに対して予め設定されていることになる。
以上のような曲線近似は、第1のエッジ検出を行った後にも行うようにすることができる。
検出された第2のエッジは、例えば図19を用いて説明した方法を用いて、ピクセルごとのエッジベクトルにすることができる。このエッジベクトルは第1の検査の前で得た2値化処理で得たエッジベクトルに相当する。
この検査は、上述の第1の検査と同じ処理であり、欠陥検出を行い、パターン変形量を求める。ここで求められる画像全体に関する位置ずれ量(シフト量)S3は、上述のS2に対応する。ここで求めたS3に、上述のS1およびS2を加えたものが、第2の基準パターンと検査対象パターン画像のパターンとの間の全シフト量となる。
以上の処理をすべての検査単位領域について行った場合には検査処理を終了し、そうでない場合にはステップS308に戻る(ステップS340)。
なお、アフィン変換とはaからfの係数を使った1次変換を意味する。
Y=dx+ey+f
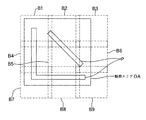
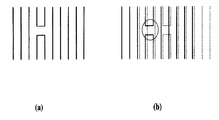
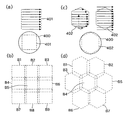
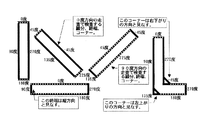
スキャン方向が0度、90度の場合、ほぼ確実に2回のスキャンを行う必要があったが、本方式においては、図64(a)において縦線と横線のみのパターンP1については図64(b)に示す45度、もしくは図64(c)に示す−45度のスキャンを1回行うことによって縦線および横線の計測精度を確保することができる。しかしながら、図64(a)において45度の線P2があった場合、45度、−45度の2回のスキャンを行う必要があるが、この頻度は縦線・横線のみのパターンP1に比べて、1回のスキャンで済む場合が比較的多いことが想像される。
ここで、スキャン方向45度または−45度といった意味について説明する。図64(b)において、右下がりのパターンについては45度方向のスキャンで精度が得られるが、右上がりのパターンについては走査線の方向と検出すべきパターンの方向が一致するので精度が得られない。そのような場合については、図64(c)に示す−45度にスキャンして得た画像を用いて、前述のスキャン方向0度、90度で述べたように2回のスキャン結果を見て、欠陥検出をする必要がある。しかしながら、この頻度はスキャン方向0度、90度に比べて少ないことが期待される。
なお、角度18度は、検査すべきパターンのすべてに対してより垂直になる方向なら他の角度でもかまわない。例えば、22.5度や、18度に45度を加えた63度、18度に90度を加えた108度などが使用できる。
スキャン方向0度、90度の説明と同様、基準パターンに従って1回スキャンをするか2回スキャンをするか等の条件を自動的に決定する必要がある。
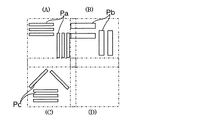
電子線のスキャンの方法を自動的に決定するための方法としては、次の3つの方法が考えられる。
1つ目は、ブロック(D)に示すように、走査エリアに検査すべきパターンがない場合、そのエリアのパターンをスキップする方法である。2つ目は、パターンの線幅に応じて、スキャンの条件を決定する方法である。例えば、ブロック(A)のパターンPaとブロック(B)のパターンPbを比較すると、パターンPbの線幅は、パターンPaの線幅に対して2倍になっている。通常、スキャンはパターンの線幅分の変動量をとるので、この例においては、ブロック(A)におけるスキャンに対して、ブロック(B)におけるスキャンでは、2分の一の倍率で画像を取得することができる。3つ目は、基準パターンの方向の分布に合わせて、スキャンの方向の条件を決定する方法である。例えば、ブロック(A)については、パターンPaは縦・横に分布しているので、45度のスキャンを1回行えばよいことが分かり、ブロック(C)については、パターンPcは横と45度の2方向に分布しているので、2回のスキャンを行う必要があることが分かる。
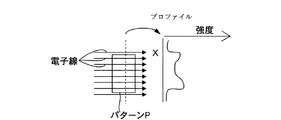
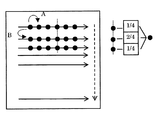
通常のスキャンにおいてX偏向については、階段状に走査する。Y偏向については、ラインごとに階段状に走査する。しかしながら、このような従来の方法においては、走査線の間の情報の取得が出来ないことにより、測定精度の低下が考えられる。図68に示すように、本発明においては、より走査線の間の情報の取得ができるようにするために、Y偏向にサイン波のような振幅を持った信号を付加することによって走査線間のデータをとる方法を示している(図68の左下側部分参照)。ここで、図示のように4点のデータをサンプリングする(図68の右下側部分参照)。この場合、サインの一周期の間でY偏向について広がったデータが取得できる。この4点のデータを加算して一つの画素の情報としてコンピュータに転送するようになっている。
図68の上側部分に示すように、スキャンのサンプリング周波数に対して、4倍の周波数を持つ発振器410をカウンタ411に接続する。カウンタ411は、X偏向発生回路412とY偏向発生回路413に接続されている。このような構成によって、スキャンのサンプリング周波数に対して4倍の周波数のクロックに対して、X偏向については階段状の右上がりの波形を生成する。Y偏向についてはサイン波のように図示のような形の波形を発生させる。サンプリングは4倍の周期で4点を取得し、その4点のデータを加算して実際の画素に対応するサンプリングデータとして生成する。
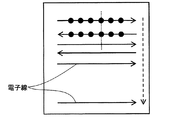
エッジのみのスキャンを実現する方法として前述の第2のエッジを検出するために使用するプロファイルに相当する区間をパターンエッジ検査区間、その中点を計測中央点として登録する。制御コンピュータ451が1つの検査区間に対する情報を取り込み、計測中央点の位置をX主偏向発生回路452とY主偏向発生回路453に送る。これにより、実際のビームの中心位置が移動する。次に、検査区間について、方向と送り幅を設定し、開始信号を与えて、発振器410に接続されたカウンタ411でX方向とY方向のスキャン波形を形成する。これに、X主偏向とY主偏向の位置を加算することにより、図71において中央部に示すようなスキャン波形がとられる。このスキャン波形について、図71において上右側に示すような7点のサンプリングを施すことによって、計測データを得ることが出来る。
計測データの取得順序付けは、図73(a)に示すように与えられた間引き率で測定点をとばしながら、全計測点を埋めるようにする順序付けや、図73(b)に示すように乱数などにより計測点をランダムにとる順序付けがある。この方法により、サンプルのチャージアップによるプロファイルの変形が低減できるので、絶縁物の計測に向いている。サンプルのチャージアップが無視しうる場合は、図形を一周するように順序付けしても良い。
2 記憶装置
3 入出力制御部
4 入力装置
5 表示装置
6 印刷装置
7 画像生成装置
11 基準パターン生成部
12 検査部
13 出力部
14 欠陥種認識部
21 基幹データベース
22 レシピデータベース
23 欠陥種参照データベース
61〜70、75、81〜84 エッジ
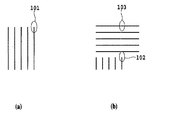
101〜103 部分
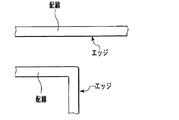
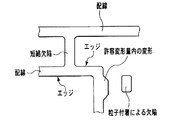
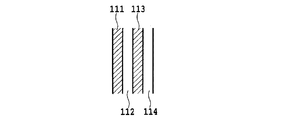
111、113 配線
112、114、204 下地
121〜126 ライン
151 検査対象パターン画像
152 基準パターン
157 区間
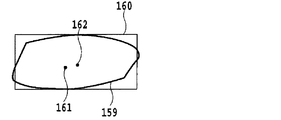
159、163、165 検査対象パターン画像のエッジ
160、164、166 基準パターンのエッジ
161 検査対象パターン画像のエッジの重心
162 基準パターンのエッジの重心
171 コーナー
172 長い配線
173 先端
174 孤立パターン
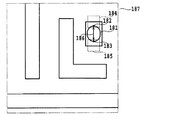
181 検査対象パターン画像のパターン
182、183 位置
184、185 高倍画像
186 検査対象パターン画像のパターンの幅
187 低倍画像
201 破線
202、203 実線
205 パターン内部
206、207 ピクセルの固まり
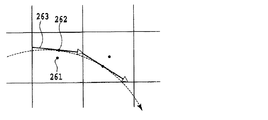
251〜255 ピクセル
261 ピクセルの中心
262 ピクセルの中心に最も近い基準パターン上の点
263 接線
301〜304 検査単位領域
310 照射系装置
311 電子銃
312 集束レンズ
313 X偏向器
314 Y偏向器
315 対物レンズ
316 レンズ制御装置
317 画像取得装置
318 偏向制御装置
320 試料室
321 XYステージ
322 XYステージ制御装置
330 2次電子検出器
340 ウエーハ搬送装置
350 制御コンピュータ
360 操作コンピュータ
Claims (7)
- 検査対象パターン画像と前記検査対象パターンを製造するために使用するデータを用いて検査するパターン検査装置であって、
前記データから線分もしくは曲線で表現された基準パターンを生成する生成手段と、
前記検査対象パターンに荷電粒子線を走査して前記検査対象パターン画像を生成し、前記検査対象パターン画像の画素の位置を置き換えることで回転した画像を取得する生成手段と、
前記検査対象パターン画像のエッジを検出する手段と、
前記検査対象パターン画像のエッジと前記線分もしくは曲線で表現された基準パターンとを比較することにより、前記検査対象パターンを検査する検査手段とを備えることを特徴とするパターン検査装置。 - 検査対象パターン画像と前記検査対象パターンを製造するために使用するデータを用いて検査するパターン検査装置であって、
前記データから線分もしくは曲線で表現された基準パターンを生成する生成手段と、
前記検査対象パターンに荷電粒子線を走査して前記検査対象パターン画像を生成する生成手段と、
前記検査対象パターン画像のエッジを検出する手段と、
前記検査対象パターン画像のエッジと前記線分もしくは曲線で表現された基準パターンとを比較することにより、前記検査対象パターンを検査する検査手段とを備え、
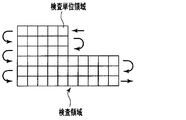
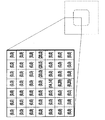
前記検査対象パターンの領域に前記荷電粒子線を走査して六角形の前記検査対象パターン画像を生成し、順次、前記領域に隣接した前記検査対象パターンの領域に前記荷電粒子線を走査して六角形の前記検査対象パターン画像を生成し、連続した前記検査対象パターン画像を生成することを特徴とする画像生成装置。 - 検査対象パターン画像と前記検査対象パターンを製造するために使用するデータを用いて検査するパターン検査装置であって、
前記データから線分もしくは曲線で表現された基準パターンを生成する生成手段と、
前記検査対象パターンに、荷電粒子線の走査方向に対して垂直方向の振幅を持たせた走査をして前記検査対象パターン画像を生成する生成手段と、
前記検査対象パターン画像のエッジを検出する手段と、
前記検査対象パターン画像のエッジと前記線分もしくは曲線で表現された基準パターンとを比較することにより、前記検査対象パターンを検査する検査手段とを備えることを特徴とするパターン検査装置。 - 検査対象パターン画像と前記検査対象パターンを製造するために使用するデータを用いて検査するパターン検査装置であって、
前記データから線分もしくは曲線で表現された基準パターンを生成する生成手段と、
前記検査対象パターンに荷電粒子線を走査して前記検査対象パターン画像を生成する生成手段と、
前記検査対象パターン画像のエッジを検出する手段と、
前記検査対象パターン画像のエッジと前記線分もしくは曲線で表現された基準パターンとを比較することにより、前記検査対象パターンを検査する検査手段とを備え、
前記検査対象パターン画像を生成する生成手段は、前記検査対象パターン画像のエッジを検出するのに使用する部分を前記荷電粒子線で走査し、前記検査対象パターン画像のエッジを検出するのに使用する部分以外の部分を走査せずに前記検査対象パターン画像を生成することを特徴とするパターン検査装置。 - 請求項4に記載のパターン検査装置において、前記検査対象パターン画像を生成する生成手段は、前記検査対象パターン画像のエッジを検出するのに使用する部分以外を走査しないことにより、検査対象パターンが存在するサンプルのチャージアップによる前記検査対象パターン画像の変形を低減することを特徴とするパターン検査装置。
- 検査対象パターン画像と前記検査対象パターンを製造するために使用するデータを用いて検査するパターン検査方法であって、
前記データから線分もしくは曲線で表現された基準パターンを生成し、
前記検査対象パターンに荷電粒子線を走査して前記検査対象パターン画像を生成し、前記検査対象パターン画像の画素の位置を置き換えることで回転した画像を取得し、
前記検査対象パターン画像のエッジを検出し、
前記検査対象パターン画像のエッジと前記線分もしくは曲線で表現された基準パターンとを比較することにより、前記検査対象パターンを検査することを特徴とするパターン検査方法。 - 検査対象パターン画像と前記検査対象パターンを製造するために使用するデータを用いて検査するパターン検査方法であって、
前記データから線分もしくは曲線で表現された基準パターンを生成し、
前記検査対象パターンに荷電粒子線を走査して前記検査対象パターン画像を生成し、
前記検査対象パターン画像のエッジを検出し、
前記検査対象パターン画像のエッジと前記線分もしくは曲線で表現された基準パターンとを比較することにより、前記検査対象パターンを検査し、
前記検査対象パターン画像の生成で、前記検査対象パターン画像のエッジを検出するのに使用する部分を前記荷電粒子線で走査し、前記検査対象パターン画像のエッジを検出するのに使用する部分以外の部分を走査せずに前記検査対象パターン画像を生成することを特徴とするパターン検査方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009261499A JP5037590B2 (ja) | 2002-10-22 | 2009-11-17 | パターン検査装置および方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002307406 | 2002-10-22 | ||
| JP2002307406 | 2002-10-22 | ||
| JP2009261499A JP5037590B2 (ja) | 2002-10-22 | 2009-11-17 | パターン検査装置および方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003360974A Division JP4472305B2 (ja) | 2002-10-22 | 2003-10-21 | パターン検査装置および方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010044091A true JP2010044091A (ja) | 2010-02-25 |
| JP5037590B2 JP5037590B2 (ja) | 2012-09-26 |
Family
ID=42015553
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009261499A Expired - Fee Related JP5037590B2 (ja) | 2002-10-22 | 2009-11-17 | パターン検査装置および方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5037590B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9316492B2 (en) | 2014-08-08 | 2016-04-19 | International Business Machines Corporation | Reducing the impact of charged particle beams in critical dimension analysis |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05218152A (ja) * | 1992-02-03 | 1993-08-27 | Fujitsu Ltd | 二次電子像変形補正装置 |
| JP2001338304A (ja) * | 1999-08-26 | 2001-12-07 | Nano Geometry Kenkyusho:Kk | パターン検査装置、パターン検査方法および記録媒体 |
| JP2002031525A (ja) * | 2000-07-14 | 2002-01-31 | Seiko Instruments Inc | 半導体ウエハのパターン形状評価方法及び装置 |
| JP2004271270A (ja) * | 2003-03-06 | 2004-09-30 | Topcon Corp | パターン検査方法及びパターン検査装置 |
-
2009
- 2009-11-17 JP JP2009261499A patent/JP5037590B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05218152A (ja) * | 1992-02-03 | 1993-08-27 | Fujitsu Ltd | 二次電子像変形補正装置 |
| JP2001338304A (ja) * | 1999-08-26 | 2001-12-07 | Nano Geometry Kenkyusho:Kk | パターン検査装置、パターン検査方法および記録媒体 |
| JP2002031525A (ja) * | 2000-07-14 | 2002-01-31 | Seiko Instruments Inc | 半導体ウエハのパターン形状評価方法及び装置 |
| JP2004271270A (ja) * | 2003-03-06 | 2004-09-30 | Topcon Corp | パターン検査方法及びパターン検査装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9316492B2 (en) | 2014-08-08 | 2016-04-19 | International Business Machines Corporation | Reducing the impact of charged particle beams in critical dimension analysis |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5037590B2 (ja) | 2012-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3524853B2 (ja) | パターン検査装置、パターン検査方法および記録媒体 | |
| JP4472305B2 (ja) | パターン検査装置および方法 | |
| JP5429869B2 (ja) | パターン検査装置および方法 | |
| JP4771714B2 (ja) | パターン検査装置および方法 | |
| JP4787673B2 (ja) | パターン検査装置および方法 | |
| US7660455B2 (en) | Pattern inspection apparatus, pattern inspection method, and recording medium | |
| JP4997351B2 (ja) | パターン検査装置および方法 | |
| US20040081350A1 (en) | Pattern inspection apparatus and method | |
| US8045785B2 (en) | Pattern inspection apparatus and method | |
| US7817844B2 (en) | Pattern inspection apparatus and method | |
| JP4827269B2 (ja) | パターン検査装置および方法 | |
| KR101828124B1 (ko) | 패턴 평가 방법 및 패턴 평가 장치 | |
| JP2011191296A (ja) | パターン検査装置および方法 | |
| JPH1089931A (ja) | パターン検査方法及びその装置並びに半導体ウエハの製造方法 | |
| JP2009206453A (ja) | 製造プロセスモニタリングシステム | |
| JP2014181966A (ja) | 検査方法および検査装置 | |
| US8244042B2 (en) | Pattern matching method and computer program for executing pattern matching | |
| JP4597509B2 (ja) | パターン検査装置およびパターン検査方法 | |
| US7020323B2 (en) | Pattern defect inspection apparatus and method | |
| JP5037590B2 (ja) | パターン検査装置および方法 | |
| EP1146481A2 (en) | Pattern inspection apparatus, pattern inspection method, and recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111018 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120703 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120704 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150713 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5037590 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |