JP2010038711A - 粒状体計測方法 - Google Patents
粒状体計測方法 Download PDFInfo
- Publication number
- JP2010038711A JP2010038711A JP2008201481A JP2008201481A JP2010038711A JP 2010038711 A JP2010038711 A JP 2010038711A JP 2008201481 A JP2008201481 A JP 2008201481A JP 2008201481 A JP2008201481 A JP 2008201481A JP 2010038711 A JP2010038711 A JP 2010038711A
- Authority
- JP
- Japan
- Prior art keywords
- image
- granular material
- granule
- flatness
- size
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
【解決手段】(A)放散状態にされた前記粒状体を撮像して画像を取得する。次に、(B)取得した画像に含まれる粒状体群のうち、単一で最大の粒状体の大きさと単一で最も扁平した粒状体の扁平度をそれぞれ求める。次に、(C)粒状体の画像から粒状体を認識する画像解析装置により、(i)画像に含まれる粒状体を画像解析によって認識する処理と、(ii)上記(i)の段階で粒状体であると認識した計測データのうち、大きさが上記(B)で求めた最大の粒状体の大きさより大きいものと、扁平度が上記(B)で求めた最も扁平した粒状体の扁平度より大きいものを、計測データから除外する処理とを実行する。
【選択図】図1
Description
図5は、特許文献1に開示されたオゾン気泡径計測方法を説明する概要図である。このオゾン気泡径計測方法は、オゾン接触槽30に取水して、オゾン接触槽30の内方底部に配置された散気管31からオゾンガスを放散処理しながら、水中カメラ32でオゾンガスの気泡33を撮影し、撮影された画像信号に基づいて画像計測演算手段34により、気泡についての各種特徴量(平均気泡径など)を出力する、というものである。なお、符号35はオゾン発生器、符号36は光源ボックス、符号37は中継制御盤である。
(1)本発明は、気泡、液滴又は固体粒子からなる粒状体の画像から該粒状体の特徴量を計測する粒状体計測方法であって、(A)放散状態にされた前記粒状体を撮像して画像を取得し、(B)取得した画像に含まれる粒状体群のうち、単一で最大の粒状体の大きさと単一で最も扁平した粒状体の扁平度をそれぞれ求め、(C)粒状体の画像から粒状体を認識する画像解析装置により、(i)前記画像に含まれる粒状体を画像解析によって認識する処理と、(ii)前記(i)の段階で粒状体であると認識した計測データのうち、大きさが前記(B)で求めた最大の粒状体の大きさより大きいものと、扁平度が前記(B)で求めた最も扁平した粒状体の扁平度より大きいものを、計測データから除外する処理とを実行する、ことを特徴とする。
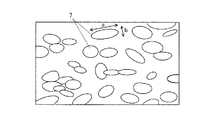
まず、放散状態にされた気泡をカメラ12で撮像し、気泡群の画像を取得する。この気泡群の画像は、攪拌槽2内の気泡計測領域を複数に分割したうちの一つの領域の画像であってもよい。この場合、各領域で複数枚の画像を取得してもよい。カメラ12での撮像により、図2に模式的に示すような気泡群の画像が得られたとする。
(i)画像に含まれる気泡を画像解析によって認識する処理。
(ii)上記(i)の段階で気泡であると認識した計測データのうち、大きさが手動で求めた最大の気泡の大きさより大きいものと、扁平度が手動で求めた最も扁平した気泡の扁平度より大きいものを、計測データから除外する処理。
2 攪拌槽
3 水
4 バッフル板
5 エアストーン
6 空気供給管
7 気泡
8 攪拌装置
8a 駆動装置
8b 回転軸
8c 攪拌翼
9 角水槽
11 照明装置
12 カメラ
14 画像解析装置
15 入力装置
16 出力装置
Claims (2)
- 気泡、液滴又は固体粒子からなる粒状体の画像から該粒状体の特徴量を計測する粒状体計測方法であって、
(A)放散状態にされた前記粒状体を撮像して画像を取得し、
(B)取得した画像に含まれる粒状体群のうち、単一で最大の粒状体の大きさと単一で最も扁平した粒状体の扁平度をそれぞれ求め、
(C)粒状体の画像から粒状体を認識する画像解析装置により、
(i)前記画像に含まれる粒状体を画像解析によって認識する処理と、
(ii)前記(i)の段階で粒状体であると認識した計測データのうち、大きさが前記(B)で求めた最大の粒状体の大きさより大きいものと、扁平度が前記(B)で求めた最も扁平した粒状体の扁平度より大きいものを、計測データから除外する処理とを実行する、ことを特徴とする粒状体計測方法。 - 前記(B)の段階において、取得した前記画像に含まれる粒状体群から、単一で最大と思われる粒状体と、単一で最も扁平していると思われる粒状体とを、それぞれ複数個ずつ抽出し、それらについて寸法を測り、該寸法に基づいて、単一で最大の粒状体の大きさと単一で最も扁平した粒状体の扁平度を特定する、請求項1記載の粒状体計測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008201481A JP5252277B2 (ja) | 2008-08-05 | 2008-08-05 | 粒状体計測方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008201481A JP5252277B2 (ja) | 2008-08-05 | 2008-08-05 | 粒状体計測方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010038711A true JP2010038711A (ja) | 2010-02-18 |
| JP5252277B2 JP5252277B2 (ja) | 2013-07-31 |
Family
ID=42011419
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008201481A Active JP5252277B2 (ja) | 2008-08-05 | 2008-08-05 | 粒状体計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5252277B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06194296A (ja) * | 1992-12-25 | 1994-07-15 | Meidensha Corp | オゾン接触槽のオゾン気泡径測定方法 |
| JPH08136439A (ja) * | 1994-11-04 | 1996-05-31 | Toa Medical Electronics Co Ltd | 粒子画像分析装置 |
| JP2000002645A (ja) * | 1998-06-18 | 2000-01-07 | Freunt Ind Co Ltd | 粉粒体処理装置の粒子測定方法 |
| JP2002207035A (ja) * | 2001-01-10 | 2002-07-26 | Sysmex Corp | 腫瘍化細胞計数方法 |
-
2008
- 2008-08-05 JP JP2008201481A patent/JP5252277B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06194296A (ja) * | 1992-12-25 | 1994-07-15 | Meidensha Corp | オゾン接触槽のオゾン気泡径測定方法 |
| JPH08136439A (ja) * | 1994-11-04 | 1996-05-31 | Toa Medical Electronics Co Ltd | 粒子画像分析装置 |
| JP2000002645A (ja) * | 1998-06-18 | 2000-01-07 | Freunt Ind Co Ltd | 粉粒体処理装置の粒子測定方法 |
| JP2002207035A (ja) * | 2001-01-10 | 2002-07-26 | Sysmex Corp | 腫瘍化細胞計数方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5252277B2 (ja) | 2013-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104704343B (zh) | 异质流体样本表征 | |
| US10748278B2 (en) | Organism evaluation system and method of use | |
| US10690594B2 (en) | Optical sensing device and method in a liquid treatment system | |
| JP4871965B2 (ja) | 検視装置、汚濁凝集処理装置及び汚濁凝集処理システム | |
| Karpinska et al. | Towards a robust CFD model for aeration tanks for sewage treatment–a lab-scale study | |
| Gulden et al. | Online bubble size analysis in micro flotation | |
| CN103439230A (zh) | 一种气泡参数测量方法及测量装置 | |
| CN108780768B (zh) | 半导体处理装备的30nm排队式液体颗粒计数器测试和清洁 | |
| JP2019162603A (ja) | 凝集剤添加量制御装置、汚泥濃縮システム、凝集剤添加量制御方法 | |
| JP2010167363A5 (ja) | ||
| JP2019162602A (ja) | 希釈汚泥撮像システム、凝集剤添加量制御システム、汚泥濃縮システム、希釈汚泥撮像方法 | |
| JP5252277B2 (ja) | 粒状体計測方法 | |
| CN115917283B (zh) | 试样纯化装置、分析系统、试样纯化方法、控制程序 | |
| Brasileiro et al. | Construction of a microbubble generation and measurement unit for use in flotation systems | |
| SE520622C2 (sv) | Förfarande och anordning för mätning av koncentrationer | |
| JP2022188187A (ja) | ファインバブル供給装置及びファインバブル分析システム | |
| Yoo et al. | Method for measuring bubble size under low-light conditions for mass transfer enhancement in industrial-scale systems | |
| Grau | An investigation of the effect of physical and chemical variables on bubble generation and coalescence in laboratory scale flotation cells | |
| Miskovic | An investigation of the gas dispersion properties of mechanical flotation cells: An in-situ approach | |
| JP2019162601A (ja) | 凝集剤添加量制御装置、汚泥濃縮システム、凝集剤添加量制御方法 | |
| CN106687205A (zh) | 用于分析和重复使用废液的系统 | |
| Lewandowski et al. | An automated image analysing routine for estimation of equivalent diameter in high-speed image sequences with high accuracy and its validation | |
| Mera-Campo et al. | Characterization of Microbubbles Generated in a Venturi Tube via Image Processing: Effect of Operating Parameters | |
| JP6864609B2 (ja) | 光学分析装置、物質の製造システム、物質の製造方法、及びプログラム | |
| US7689026B2 (en) | Method for testing image processing circuit, particle image analyzer, and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110627 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120705 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120914 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130404 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5252277 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160426 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |