JP2010030592A - シートベルト巻取装置及び制御方法 - Google Patents
シートベルト巻取装置及び制御方法 Download PDFInfo
- Publication number
- JP2010030592A JP2010030592A JP2009255696A JP2009255696A JP2010030592A JP 2010030592 A JP2010030592 A JP 2010030592A JP 2009255696 A JP2009255696 A JP 2009255696A JP 2009255696 A JP2009255696 A JP 2009255696A JP 2010030592 A JP2010030592 A JP 2010030592A
- Authority
- JP
- Japan
- Prior art keywords
- seat belt
- motor
- webbing
- belt retractor
- winding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 28
- 230000007246 mechanism Effects 0.000 claims abstract description 172
- 230000009467 reduction Effects 0.000 claims abstract description 107
- 238000004804 winding Methods 0.000 claims abstract description 76
- 238000001514 detection method Methods 0.000 claims abstract description 52
- 230000005540 biological transmission Effects 0.000 claims abstract description 32
- 210000000078 claw Anatomy 0.000 claims description 33
- 230000002829 reductive effect Effects 0.000 claims description 10
- 238000004891 communication Methods 0.000 claims description 5
- 230000005284 excitation Effects 0.000 claims description 5
- 230000004044 response Effects 0.000 claims description 5
- 230000005347 demagnetization Effects 0.000 claims 1
- 230000004048 modification Effects 0.000 description 28
- 238000012986 modification Methods 0.000 description 28
- 230000002093 peripheral effect Effects 0.000 description 25
- 230000008859 change Effects 0.000 description 12
- 208000027418 Wounds and injury Diseases 0.000 description 11
- 229910000831 Steel Inorganic materials 0.000 description 6
- 239000006247 magnetic powder Substances 0.000 description 6
- 239000010959 steel Substances 0.000 description 6
- 239000003921 oil Substances 0.000 description 5
- 239000003638 chemical reducing agent Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 230000007704 transition Effects 0.000 description 4
- 230000036961 partial effect Effects 0.000 description 3
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 2
- 206010041349 Somnolence Diseases 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005281 excited state Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000000452 restraining effect Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000037237 body shape Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images




















Landscapes
- Automotive Seat Belt Assembly (AREA)
Abstract
【解決手段】 ベースフレーム3にスプール軸15を介して軸支され、リターンスプリングの巻き戻し解放力により、外周にウェビングWが巻き取られるスプール2を、減速機構10を介したモータ5の駆動によって回転させてウェビングWを巻き取るようにした。その際、減速機構10は異なる減速比に設定された2系統の減速機構10A、10Bとから構成され、いずれかの減速機構に、制御部9を介して外部検知部40、50及び外部信号センサから得られた駆動信号に対応して切り替る切替手段70と、共有されている伝達要素が設定された回転トルク以下の回転を伝達するようにした抵抗トルク手段60とを備えた。
【選択図】 図5
Description
[シートベルト巻取装置本体の構成]
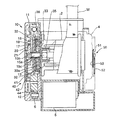
以下、本発明のシートベルト巻取装置の構成について、添付図面を参照して説明する。図1は、本発明のシートベルト巻取装置1のアッセンブリとしてのウェビング巻き取りリール部2A、リールロック機構4、駆動源としてのモータ5と減速機構を収容する減速機構ケーシング11、減速機構10(図2)の一部を構成する遊星ギアユニット30及びモータ制御用の検知部40、50の概略構成を示した分解斜視図である。図2はそのうちの減速機構10の内部構成を示した分解斜視図である。
減速機構10の構成について図2〜図4を参照して説明する。減速機構10は前述したように、第1減速機構10Aと第2減速機構10Bの2系統が、一部の伝達要素を共有して一体化して構成されたものである。本実施の形態ではこの減速機構10の切り替えを行う切替手段70として電磁ソレノイド71で動作する爪機構70が用いられている。
(渦巻きバネ併用タイプ)
次に、従来の渦巻きバネをリターンスプリングとして巻き取り機構中に組み込んだ変形例について図5を参照して説明する。この変形例では図2の構成に対して通常使用時におけるスプール軸の巻き取りにリターンスプリングの巻き戻り解放力を利用するようになっている。スプール軸15aの突端にはコッター15dが形成され、スプリングブシュ101が嵌着されるようになっている。スプリングブシュ101には渦巻きバネのリターンスプリング102の内周端102aが定着される。これによりリターンスプリング102の巻き、巻き戻り動作によるトルクをスプール軸15への伝達する役割を果たす。さらにリターンスプリング102全体を覆うようにスプリングカバー103がケーシング11にボルト止め(図示せず)されている。このような構成からなるシートベルト巻取装置では、通常の使用時ではリターンスプリング103によるウェビング巻き取りが行われ、車両走行時にシートベルトの引き込みが必要な状態で併設されたモータ5を駆動させたウェビング巻き取りを行うこともできる。
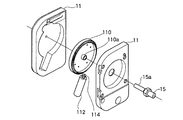
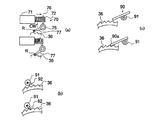
図6は上述した大減速比機能を省略し、乗員のシートベルト装着時の快適性が得られるようにした減速機構の変形例の部分構成を示した部分斜視図である。同図に示したように、スプール軸15の先端15aはケーシング11内に収容された高減速比のフェースギア110のボス110aを貫通し、図示しないリターンスプリング(図5参照)の内周端に固着されている。フェースギア110には所定の円錐ピッチ面が形成された大直径ギアが用いられている。一方、スプール軸15とその回転軸とが直交あるいは所定傾角をなす食違い軸を構成するように電動モータ112がケーシング11内に収容されている。この電動モータ112の回転軸端にはフェースギア110と噛合する駆動歯車114が装着されている。電動モータ112の回転はフェースギア110に減速されて伝達され、スプール軸15の低速回転が実現する。この電動モータ112の駆動は乗員のシートベルト装着時に行われ、これによりシートベルト装着時に余分に引き出されたウェビング(図示せず)を乗員の胸部に圧迫感のない程度まで引き込み、乗員の体型に軽くフィットさせることができる。走行時のウェビングの巻き取りは上述したリターンスプリング等により行う。このように大減速比の巻き取り機能を省略したことにより低廉で小型の巻取装置を提供することができる。
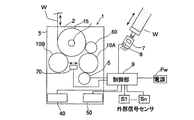
以上に説明したシートベルト巻取装置の各機構と、これらの機構を連係づけて動作させるための制御部及び制御部に必要な駆動信号を送る各種検知部、検知センサの模式構成を図7に示した。図7には上述した巻取装置1と、図1〜図4に示したように巻取装置1内に収容された各機構に所定の動作指令を行う装置外の制御部9と、この制御部9に送られる乗員のシートベルト装着状態や走行時の車両の安全状態を知らせる外部信号センサとが模式的に示されている。すなわち、巻取装置1内にはスプール軸12を介してベースフレーム3に軸支されたスプール2が配置され、このスプール2にウェビングWが巻回されるようになっている。このスプール2の巻き取り動作は、モータ5の回転トルクを減速比の異なる2系統の伝達経路としての第1減速機構10A、第2減速機構10Bと、この伝達経路を制御部9からの駆動信号に応じて切り替えるための切替手段70と、伝達される回転トルクの大きさにより第1減速機構10Aと第2減速機構10Bのいずれかの経路を経由するように経路上に設けられた抵抗トルク手段60と、モータ駆動あるいはウェビングWの引き出しによるスプール2の回転を検知するウェビング引き出し検知部40と、スプール回転検知部50とが備えられている。そして、車内の一部にはこの巻取装置1のモータ5に駆動信号を出力する制御部9が装備されている。この制御部9には入力I/F(図示せず)を介してウェビング引き出し検知部40、スプール回転検知部50、ウェビングのトングが装着されるバックル7内に内蔵され、ウェビングのトングがバックルに装着されたことを知らせるバックルスイッチ8及び走行時に車両の様々状態を知らせる複数の外部信号センサS1、…Snが接続されており、乗員の様々なシートベルト装着状態に応じて得られる状態信号、走行時の様々な状態において得られる外部信号が入力される。制御部9ではこれらの入力信号をもとにCPU電源、モータ駆動電源のON/OFF制御がなされ、またモータ回転制御信号、減速機構の切替のための切替信号等の駆動信号が生成され、これらの駆動信号によりモータ駆動制御が行われる。
次に、ウェビング引き出し検知部40とスプール回転検知部50の構成について図8を参照して説明する。図8は両検知部を説明するために、それぞれの検知部が取り付けられているシートベルト巻取装置1の側面を対向させた状態で模式的に示したものである。図8左半図に示したように、このウェビング引き出し検知部40は扇形形状したスイッチプレート41と、スイッチプレート41を要位置で軸支する回動ピン42と、回動ピン42から短い腕長で延びる接点アーム43と、接点アーム43の回動により接点がON/OFFされるリミットスイッチ44とから構成されている。図3(図4)に示したように、スイッチプレート41は両端にガイド41aが設けられ、その回動範囲(角度)が規制されている。この範囲で前述したスプール軸入力ギア20の端部のリング状溝21に円弧状縁辺41bが接触している。円弧状縁辺41bは縁辺に沿った内側に円弧溝41cが形成されており、円弧状縁辺41bがリング状溝21に当接するとわずかに撓み、押圧力が付与され、リング状溝21の回転に伴い、滑ることなくスイッチプレート41が回動できる。同図は初期位置にあったスイッチプレート41(2点鎖線)がスプール2のCW方向への回動(ウェビングWの引き出しに対応)に伴い、スイッチプレート41がCCW方向に支点周りに回動し、リミットスイッチ44のON状態が示されている。
遊星ギアユニット30の内歯ギア34の外周に形成されたラチェット歯36に係止される爪機構70について、代表的な2種類の構成例を説明し、併せてその変形例について簡単に説明する。
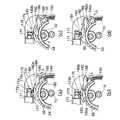
(第1構成例)第1構成例としての爪機構70の構成とその動作について図2及び図9各図を参照して説明する。爪機構70はケーシング11の内面に保持されたソレノイド71と回転構造のレバーストッパ75とから構成されている。図9(a)に示したように、ソレノイド71は励磁されることでそのコイル内をスライドするプランジャ72を有している。ソレノイド71は通電状態(励磁状態)ではコイル内に引き込まれ、励磁が解除された状態ではスプリング73により初期状態まで引き出されるようにスライドする。
次に、上述した各機構によって実現する第1減速機構10A及び第2減速機構10Bにおける回転駆動力の伝達経路および滑り機構60の動作について図13〜図15を参照して説明する。本実施の形態のDCモータ5では、駆動回路から出力される駆動パルス信号に応じてその回転数をオープンループ制御しているが、本実施の形態ではモータ5の回転数を3段階のデューティー比(25,50,100%)で弱、中、強度の回転トルクでウェビング巻き取りを行うように制御回路を設計している。実際の使用状態とウェビング巻き取り設定との関係は後述する。まず、モータ5の回転が第1減速機構10Aを経由して小トルクのままスプール軸15に伝達され、ウェビングWが巻き取られる時の伝達経路における各伝達要素の動作について説明する。図13(a)に示したように、ウェビング巻き取りのために、モータ5がCCW方向に低速回転すると、ギア12を介して減速ギア13が低速回転する。このとき減速ギア13の回転トルクは凹所13aに取り付けられたロータリーダンパ17のローター軸18の設定トルク以下であるため、スプール軸入力ギア20は減速ギア13に対して相対回転せず減速ギア13と一体的に回転し、減速ギア13の回転トルクがそのままスプール2の巻き取り回転力として付与される。このときスプール2の回転に伴い、スプール2に一体的に嵌着されている遊星ギアユニット30のキャリア33、スプール軸15の突出軸15aに遊嵌されている太陽ギア31、内歯ギア34が互いに相対回転せずにスプール2と一体的にCCW方向に回転する(図14(a)参照)。
次に、モータ5の回転が、大トルクを生じさせる第2減速機構10Bを経由してスプール軸15に伝達され、ウェビングWが急速に巻き取られる時の伝達経路における各伝達要素の動作について説明する。図13(b)に示したように、ウェビング巻き取りのために、モータ5がCCW方向に設定された回転数で高速回転すると、ギア12を介して減速ギア13が所定の減速比で回転する。一方、図14(b)に示した遊星ギアユニット30の太陽ギア31は減速ギア13と同数回転する。このとき内歯ギア34の外周に形成されたラチェット歯36には爪機構70が係止しているので、内歯ギア34の回転がロックされる。このため、遊星ギア32と遊星ギア32を軸支しているキャリア33は太陽ギア31の自転に伴い、ロックされた内歯ギア34の内歯37に噛合しながらCCW方向に公転する。キャリア33の回転に伴ってソケット部35で嵌合しているスプール軸15の拡径部に大回転トルクが付与される。
さらに、この滑り機構60が動作する典型的な状態について図15を参照して説明する。モータ5が低速回転し、ウェビングWを巻き取っている最中に乗員がウェビングWを押さえてその巻き取りを阻止したり引き出したりすると、スプール軸入力ギア20は停止あるいはCW方向に回転する。このときモータ5はCCW方向に回転している状態にあり、減速ギア13のCCW方向の回転を阻止すると逆方向に負荷がかかり、その瞬間にロータリーダンパ17のローター軸18の設定トルクを上回ったスプール軸入力ギア20はモータ回転方向と反対向き回転し、ローター軸18のギア19間に滑りが生じる。またウェビングWが引き出されたことが引き出し検知部40で検知されるので、モータ5の回転は停止する。これにより、乗員はウェビングWを容易に引き出すことができる。
以上の構成からなるシートベルト巻取装置の制御方法におけるモータ駆動モードについて、図16〜図18の動作フロー図及び図19、図20のウェビング巻き取り状態における各変化図を参照して説明する。図16はウェビング巻き取り制御における動作フローを示したフローチャートである。図17は各種の設定モードにおける処理動作フローを示したフローチャートである。図18はベルト装着時における快適性向上のための動作フローを示したフローチャートである。
通常、乗員は座席にすわると同時に、ピラー内等に格納されているシートベルトを引き出し、座席の反対側サイドにあるバックルにトングを装着する。このときウェビングWの引き出しを巻取装置1のウェビング引き出し検知部40が検知し、回路、CPU電源PwをON状態とする(ステップ100,110)。シートベルト取り扱い動作ではなく、イグニションキーの操作等による外部信号により電源ONとなるようにしてもよい。ウェビング引き出しを検知した状態信号により、モータ5は回転を停止し、ウェビング巻き取りは停止される(ステップ120,130)。その後、適正にトングがバックルに装着され、バックル7に内蔵されているバックルスイッチ8(図7参照)がONになったら、余分に引き出されたウェビングWの弛みをとり、ベルトフィットさせるためにモータ5が中速回転し、ウェビングWの巻き取りを行う。これにより乗員の胸部から腹部にかけて圧迫感がない程度に弛みなくウェビングWが掛け渡される。この結果、ベルトのスラッグを取り、乗員の体型に軽くフィットさせることができる(ステップ150)。このベルトフィットが終了したことを知らせる状態信号をもとに、さらにモータのトルクを小さくしたり、モータ駆動を停止してベルト装着による圧迫感を除去することができる。この状態から乗員が体を大きく前に傾けた場合等にはその動きに追従してウェビングが引き出され、引き出しが停止した時点から再度同様の動作でウェビングの巻き取りが行われる。なお、ウェビングW引き出しが途中で中断したという状態信号を検知した場合には、ウェビングWが所定の駆動トルク値で巻き取られ、巻取装置1に格納される(ステップ125,145)。
(a)ベルト装着時の弛み防止従来は、シートベルトを装着した後にシートスライド等により座席を後ろに下げてもシートベルトの引き出しを検知しない。そこで、シートベルト装着時において所定の時間間隔でシートベルトの巻き取り動作を繰り返して行い、装着時にシートベルトがゆるんだ状態が生じないようにしている。具体的には図18に示したように、シートベルトの引き出しが検知された場合には所定の巻き取りが行われるが(ステップ300、310)、さらにシートベルトの引き出し、巻き取りが完了した後に一定時間経過した場合に(ステップ320、330)、再度巻き取り動作に入り(ステップ310)、巻き取り状態を判断し(ステップ340)、巻き取りが完了した後に(ステップ350)、再度、所定の時間間隔で検知ループが動作するようにした。これによりシートベルト装着時のベルト弛みを確実に解消することができる。
(c)警告モードたとえば、走行時の前後車両の車間検知センサにより車間距離が設定距離より接近したような場合で、ドライバーにその状況を体感的に警告することを主目的とする。車間距離は車両スピード等に応じて多岐に設定することができるが、一定の車間距離以内に障害となる物体が存在した場合等に、ウェビングの巻き取りを行い、ドライバーに物体の存在、接近状態を体感させる。このとき自車の速度、物体との相対速度、変化率等を因子として用い、車庫入れ等のように壁等の対象に自分の操作で接近させるような場合には、警告モードにならないようにすることも考慮できる。
(d)ホールドモードウェビングを巻き込んで乗員の身体を保持(ホールド)するためのモードで、たとえば、上記警告モードより緊急性の高い状態を対象としたり、走行時にドライバーが居眠りをし、前屈みに倒れ込むようにしてシートベルトの引き出しがあったり、既存技術で実現している居眠り検知センサが居眠りを検知した場合等にドライバーの姿勢を正し、さらに覚醒させるための警報として機能する。その他、急カーブや悪路走行においてドライバーや乗員を座席にホールドさせて安全を図るためにウェビングの巻き取り動作信号を発生させることもできる。この場合の外部信号発生のトリガーとしてはABS作動信号や操舵角センサ、路面センサ等による信号を利用することができる。
(e)プリテンションモード従来、衝突や急減速度を検知した場合にウェビングを所定量だけ巻き取り、乗員の拘束効果を高めることができるプリテンショナーがあるが、レーザーレーダー等の車間距離検知センサによる衝突回避不可能情報が得られた場合にはモータ駆動によりウェビングを急速に巻き込み、乗員の拘束保護を衝突に先立って行えるようにする。急速な巻き取りにおいて乗員が傷害を受けることのないような巻き込み速度等を設定することができ、2次的な傷害を防止することができる。
(減速機構の変形例)
次に、上述した全体構造及び各減速機構10の変形例について説明する。図21(a)〜図21(e)は減速機構10の全体構造の変形例を示した模式説明図である。図21(a)では、第1減速機構10Aと第2減速機構10Bを独立して設け、モータ5からの回転トルクの伝達を伝達ギア70の切替により切り替えるようにしている。この伝達ギア70の移動はギア軸を図示したようにスライドさせたり、軸方向に移動させたりすることで実現できる。この場合には第2減速機構10Bに滑り機構60を介さないので大トルク回転を効率よく出力することができる。さらに、図21(b)に示したように切替ギアに代えてソレノイド71の動作によりモータ5の連結を滑り機構60側と第2減速機構10B側に切り替えることもできる。図21(c)では上述した本実施の形態に代え第2減速機構10Bと滑り機構60との間に切替ギア70を配置した変形例を示した。さらに、図21(d)に示したように、第1減速機構10A及び第2減速機構10Bとの間でモータ駆動を直接切り替えるとともに、スプール2と滑り機構60との間をソレノイド71の動作により連結、切断したりするようにもできる。図21(e)はモータ5の回転トルクを第1減速機構10Aと滑り機構60を介してスプール2に伝達した単一伝達経路から構成された変形例である。この装置では上述したコンフォートモードでの操作性を重視し、緊急時の大トルクのウェビング巻き取り動作を他の付勢手段に負担させることが好ましい。
次に滑り機構60の変形例について説明する。本実施の形態では、ロータリーダンパ17を用いた滑り機構60を採用したが、トルクリミッタとして摩擦機構、バネ付勢機構を用いた種々の変形例を挙げることができる。図25(a)は、板バネ63によりディスクが一定のトルク以下で回転しないようにした滑り機構60である。内側ディスク61のフランジに取り付けられた板バネ63の先端に取り付けられた制動パッド64で外側ディスク62のフランジ62aを押圧して摺動抵抗が付加されているので、外側ディスク62のトルクが一定以上になるまで内外のディスク61、62は一体的に回転する。図25(b)は、内側ディスク61の外周にリング状ベーン66を設け、このベーン66をシリコンオイル等を封入したリング状オイル室65を有する外側ディスク62と同心的に組み立てた変形例である。この場合にもベーンと回りのオイルの粘性抵抗の一定値を越えるまで内外ディスク61、62は一体回転する。
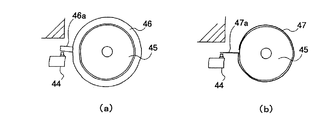
ウェビング引き出し検知部40の変形例について説明する。上述した扇形のスイッチプレート41(図8参照)に代えてウェビングの引き出しを検知するスイッチの変形例を図27各図に示す。図27(a)は、トリガー突起46aが形成されたリング46と、このリング46に所定の摺動抵抗をとって相対回転可能なブシュ45とから構成された引き出し検知部40を示している。ブシュ45はスプール軸(図示せず)の回転を受けて直接回転する。回転トルクが摺動抵抗以下であるときにリング46はブシュ45と一体回転する。そしてトリガー突起46aによってリミットスイッチ44はONとなる。同図(b)は締め輪として機能するリング状スプリング47をブシュ45に外嵌し、ブシュ45とブシュ45を締め付けるスプリング47の付勢力との間の摩擦を利用してブシュ45とスプリング47とを一体回転させる段階で、リミットスイッチ44をONさせる引き出し検知部を示している。また、本実施の形態で用いた公知のリミットスイッチに代えて、通常の接点スイッチや、スイッチプレートやリングにスリットを設け、回転動作によってスリットを透過した光を受光するようにした光電センサ、金属製のスイッチプレートやリングの移動を検知可能な金属感知の近接センサー、磁界変化を検知するホール素子等、公知のセンサスイッチを利用することができることは言うまでもない。
次に、スプール回転検知部について説明する。スプール回転検知部においては上述した可変抵抗により直接電圧変化を検出するだけでなく、この回転軸に沿ったエンコーダー形式の光電センサ及び引き出し検知にも利用可能なスリットの位置を検出する光電センサ、近接センサ、磁気ヘッドによってその位置を読み取る磁気検出センサ等を用いることができる。
また、本実施の形態では、モータとしてDC(直流)モータを利用したが、可変速のモータであれば、公知の各種サーボモータ、たとえばステッピングモータ、超音波モータ、ACモータ等とそれぞれのモータ駆動回路を用いることができ、これにより上述の巻き取り動作を実現できることはいうまでもない。また、このモータ駆動のための制御基板はモータを設置した際に生じるウェビング巻き取り部の下の空きスペースに、モータと隣接するようにして据えることがハーネスの配線上の理由等により好ましい。しかし、フレーム内において設置可能な範囲であれば適当な位置に設置してよいことはいうまでもない。
2 スプール
3 ベースフレーム
5 モータ
9 制御部
10 減速機構
10A 第1減速機構
10B 第2減速機構
13 減速ギア
15 スプール軸
17 ロータリーダンパ
20 スプール軸入力軸
30 遊星ギアユニット
31 太陽ギア
32 遊星ギア
33 キャリア
34 内歯ギア
36 ラチェット歯
40 ウェビング引き出し検知部
41 スイッチプレート
44 リミットスイッチ
50 スプール回転検知部
52 減速ギアトレイン
60 抵抗トルク手段(滑り機構)
70,170 切替手段(爪機構)
71,171 ソレノイド
76,176 主動レバー
77,177 従動レバー
78 係止爪
180 第1パウル
182 第2パウル
190 解放スプリング
W ウェビング
Claims (25)
- ベースフレームにスプール軸を介して軸支され外周にウェビングが巻き取られるスプールを、リターンスプリングの巻き戻し解放力により前記ウェビングを巻き取るとともに、減速機構を備えたモータ駆動により巻き取りを切り替えて行うようにしたシートベルト巻取装置であって、前記減速機構は所定の減速比に設定された伝達経路と、該伝達経路を、外部から得られた駆動信号に対応してスプール軸に連結する切替手段とを備えたことを特徴とするシートベルト巻取装置。
- 前記駆動信号は、乗員のシートベルト装着動作において得られる状態信号及び/または車両走行時に、該車両に搭載された検知手段から得られる外部信号とをもとに設定されることを特徴とする請求項1記載のシートベルト巻取装置。
- 前記外部信号を受け、前記切替手段の動作を行い、前記リターンスプリングにより大減速比で前記ウェビングの巻き取りを行うようにしたことを特徴とする請求項2記載のシートベルト巻取装置。
- 前記伝達経路は、前記外部信号を受けた際の駆動信号により前記切替手段を動作させて前記減速機構内に設けられた伝達要素の一部を固定して切り替えられるようにしたことを特徴とする請求項1記載のシートベルト巻取装置。
- 前記切替手段は、爪機構からなり、該爪機構が遊星ギアユニットの内歯ギアの外周に形成されたラチェット歯に係止して該内歯ギアの回転を固定するようにしたことを特徴とする請求項1記載のシートベルト巻取装置。
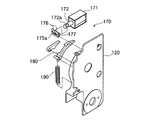
- 前記切替手段は、爪機構からなり、回転軸に軸支された2個のパウルが協働して前記内歯ギアのラチェット歯に係止して前記内歯ギアの回転を固定するようにしたことを特徴とする請求項5記載のシートベルト巻取装置。
- 前記2個のパウルのうち、第1のパウルがソレノイドの励磁により回転軸回りに回動し、前記ラチェット歯との係止する動作を経て、第2のパウルを前記ラチェット歯に係止させるようにしたことを特徴とする請求項6記載のシートベルト巻取装置。
- 前記ソレノイドの消磁により第1のパウルに連結された付勢バネが伸長し、前記第2のパウルの前記ラチェット歯への係止が解かれるようにしたことを特徴とする請求項7記載のシートベルト巻取装置。
- 乗員のシートベルト装着動作において得られる状態信号及び/または車両走行時に該車両に搭載された検知手段から得られる外部信号を受け、モータの回転トルクを、該状態信号または外部信号に対応した所定の減速比に切り替え、あるいは前記モータ駆動状態を制御して所定の駆動トルク値に変更してスプール回転を制御し、前記ウェビングを前記スプールに巻き取るようにしたことを特徴とするシートベルト巻取装置の制御方法。
- 巻き取り状態にあるウェビングの引き出しを検知して得られた状態信号をもとに、モータの回転を停止させるようにしたことを特徴とする請求項9に記載のシートベルト巻取装置の制御方法。
- トングがバックルに装着されたことを検知して得られた状態信号をもとに、乗員にベルトフィットさせる程度の駆動トルク値で前記モータを駆動して前記ウェビングを巻き取るようにしたことを特徴とする請求項9に記載のシートベルト巻取装置の制御方法。
- 前記ベルトフィットが終了したことを検知して得られた状態信号をもとに、前記モータの駆動トルク値を減少させ、あるいはモータ駆動を停止させるようにしたことを特徴とする請求項11に記載のシートベルト巻取装置の制御方法。
- ウェビングの引き出しが中断したことを検知して得られた状態信号をもとに、前記モータを駆動させ前記ウェビングの巻き取りを再開させるようしたことを特徴とする請求項9に記載のシートベルト巻取装置の制御方法。
- トングがバックルに装着された状態で、ウェビングが引き出され、その引き出しが中断した状態からウェビングの巻き取りが再開され、その後ベルトフィットさせた後にモータの駆動トルク値を減少させ、あるいはモータ駆動を停止させるようにしたことを特徴とする請求項9に記載のシートベルト巻取装置の制御方法。
- 前記ベルトフィット動作におけるモータの駆動トルク値は最初にトングが装着された際のベルトフィット動作における値より低く設定されたことを特徴とする請求項14に記載のシートベルト巻取装置の制御方法。
- トングがバックルから分離されたことを検知して得られた状態信号をもとに、前記モータを駆動して前記ウェビングを巻取装置内に巻き取るようにしたことを特徴とする請求項9に記載のシートベルト巻取装置の制御方法。
- 前記ウェビングの引き出しを検知すると同時あるいは一定時間経過後に、前記モータを駆動する制御回路の電源をON状態とするようにしたことを特徴とする請求項9に記載のシートベルト巻取装置の制御方法。
- 前記ウェビングが巻き取り完了したことを検知すると同時あるいは一定時間引き出し動作がないことを検知して、前記モータを駆動する制御回路の電源をOFF状態とするようにしたことを特徴とする請求項9に記載のシートベルト巻取装置の制御方法。
- 前記ウェビング巻き取り完了後に一定経過時間間隔をとってウェビングの巻き取りか必要かを判定し、必要に応じた巻き取り動作を行うようにしたことを特徴とする請求項9記載のシートベルト巻取装置の制御方法。
- 前記モータ駆動によるウェビング巻き取り速度を、モータ速度制御により可変切替させるようにしたことを特徴とする請求項9記載のシートベルト巻取装置の制御方法。
- 得られた外部信号に応じて前記モータの駆動トルク値を一定値あるいは途中可変値に切替手段を介して切り替え、前記モータ駆動により前記ウェビングの巻き取りを行うようにしたことを特徴とする請求項9に記載のシートベルト巻取装置の制御方法。
- 前記切替手段を解除させずに、切り替え後のモータの駆動状態を保持するモードを備えたことを特徴とする請求項20に記載のシートベルト巻取装置の制御方法。
- 前記切替手段を解除させずに、切り替え後のモータの駆動状態を、減速機構のトルク抵抗手段を介して保持させるモードを備えたことを特徴とする請求項21に記載のシートベルト巻取装置の制御方法。
- 前記モードは車両走行時のホールドモードあるいはチャイルドシート固定モードであることを特徴とする請求項23に記載のシートベルト巻取装置の制御方法。
- 前記外部信号に対応した前記モータの動作指令信号を、各座席に設けられた各シートベルト巻取装置に対して独立あるいは斉一情報として各座席を認識した通信方法を介して伝達し、各座席ごとに所定のモード設定を行えるようにしたことを特徴とする請求項21に記載のシートベルト巻取装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009255696A JP5190434B2 (ja) | 1999-01-19 | 2009-11-09 | シートベルト巻取装置及び制御方法 |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP1018499 | 1999-01-19 | ||
| JP1999010184 | 1999-01-19 | ||
| JP1999173624 | 1999-06-21 | ||
| JP17362499 | 1999-06-21 | ||
| JP2009255696A JP5190434B2 (ja) | 1999-01-19 | 2009-11-09 | シートベルト巻取装置及び制御方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP35533499A Division JP4467688B2 (ja) | 1999-01-19 | 1999-12-15 | シートベルト巻取装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010030592A true JP2010030592A (ja) | 2010-02-12 |
| JP5190434B2 JP5190434B2 (ja) | 2013-04-24 |
Family
ID=41735599
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009255696A Expired - Fee Related JP5190434B2 (ja) | 1999-01-19 | 2009-11-09 | シートベルト巻取装置及び制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5190434B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102024048B1 (ko) * | 2018-12-31 | 2019-09-24 | 주식회사 우신세이프티시스템 | 자세 제어가 가능한 가변차량센서를 구비하는 안전벨트 리트랙터 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58179256U (ja) * | 1982-05-27 | 1983-11-30 | タカタ株式会社 | 安全ベルト巻取装置 |
| JPS6087754U (ja) * | 1983-11-11 | 1985-06-17 | 株式会社東海理化電機製作所 | ウエビング巻取装置 |
| JPS6270046U (ja) * | 1985-10-22 | 1987-05-02 | ||
| JPS62130965U (ja) * | 1986-02-12 | 1987-08-18 | ||
| JPS6422654A (en) * | 1987-07-20 | 1989-01-25 | Aisin Seiki | Webbing winder |
| JPH0379212A (ja) * | 1989-08-15 | 1991-04-04 | Taga Electric Co Ltd | 超音波回転加工装置 |
| JPH09132113A (ja) * | 1995-09-08 | 1997-05-20 | Takata Kk | 車両の乗員拘束保護システム |
| JP2711428B2 (ja) * | 1993-08-09 | 1998-02-10 | タカタ株式会社 | シートベルト用巻取装置 |
| JPH10167003A (ja) * | 1996-12-16 | 1998-06-23 | Takata Kk | シートベルトリトラクタ |
| JP2001187561A (ja) * | 1999-12-01 | 2001-07-10 | Trw Automot Electronics & Components Gmbh & Co Kg | 搭乗者拘束装置用のベルトリトラクタ |
| JP2004532150A (ja) * | 2000-12-21 | 2004-10-21 | オートリブ・デベロプメント・アクツイエボラーグ | 予備緊張装置を持つ安全ベルト巻取り器 |
-
2009
- 2009-11-09 JP JP2009255696A patent/JP5190434B2/ja not_active Expired - Fee Related
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58179256U (ja) * | 1982-05-27 | 1983-11-30 | タカタ株式会社 | 安全ベルト巻取装置 |
| JPS6087754U (ja) * | 1983-11-11 | 1985-06-17 | 株式会社東海理化電機製作所 | ウエビング巻取装置 |
| JPS6270046U (ja) * | 1985-10-22 | 1987-05-02 | ||
| JPS62130965U (ja) * | 1986-02-12 | 1987-08-18 | ||
| JPS6422654A (en) * | 1987-07-20 | 1989-01-25 | Aisin Seiki | Webbing winder |
| JPH0379212A (ja) * | 1989-08-15 | 1991-04-04 | Taga Electric Co Ltd | 超音波回転加工装置 |
| JP2711428B2 (ja) * | 1993-08-09 | 1998-02-10 | タカタ株式会社 | シートベルト用巻取装置 |
| JPH09132113A (ja) * | 1995-09-08 | 1997-05-20 | Takata Kk | 車両の乗員拘束保護システム |
| JPH10167003A (ja) * | 1996-12-16 | 1998-06-23 | Takata Kk | シートベルトリトラクタ |
| JP2001187561A (ja) * | 1999-12-01 | 2001-07-10 | Trw Automot Electronics & Components Gmbh & Co Kg | 搭乗者拘束装置用のベルトリトラクタ |
| JP2004532150A (ja) * | 2000-12-21 | 2004-10-21 | オートリブ・デベロプメント・アクツイエボラーグ | 予備緊張装置を持つ安全ベルト巻取り器 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102024048B1 (ko) * | 2018-12-31 | 2019-09-24 | 주식회사 우신세이프티시스템 | 자세 제어가 가능한 가변차량센서를 구비하는 안전벨트 리트랙터 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5190434B2 (ja) | 2013-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4467688B2 (ja) | シートベルト巻取装置 | |
| JP3924221B2 (ja) | ウエビング巻取装置 | |
| US4669680A (en) | Webbing retractor | |
| US20060097096A1 (en) | Method for controlling a seat belt retractor | |
| US20050011983A1 (en) | Seat belt retractor and seat belt device | |
| JP2001151076A (ja) | 乗員拘束保護システム | |
| JP3924212B2 (ja) | ウエビング巻取装置 | |
| JP2011230691A (ja) | シートベルトリトラクタの制御装置およびこれを備えたシートベルト装置 | |
| JP4705058B2 (ja) | モータ駆動シートベルト装置 | |
| EP1243486A1 (en) | Motor retractor system | |
| JP3964750B2 (ja) | ウエビング巻取装置 | |
| JP2003335218A (ja) | 車輛安全ベルト用のベルトリトラクター | |
| JP3886088B2 (ja) | 乗員拘束保護装置 | |
| JP5190434B2 (ja) | シートベルト巻取装置及び制御方法 | |
| CN103732455B (zh) | 座椅安全带装置 | |
| EP2199160A1 (en) | Seatbelt apparatus for vehicle | |
| JP2000071935A (ja) | シートベルトリトラクタおよびこれを用いた車両の乗員拘束保護システム | |
| JP2005289261A (ja) | ウエビング巻取装置 | |
| CN100562447C (zh) | 座椅安全带装置 | |
| JP2005231388A (ja) | 駆動力伝達機構及びウエビング巻取装置 | |
| US5816522A (en) | Tension controlled seat belt retractor | |
| JP5268807B2 (ja) | 車両用シートベルト装置 | |
| JPH10167007A (ja) | シートベルトリトラクタ | |
| JP2006143154A (ja) | ウエビング巻取装置 | |
| JP3990617B2 (ja) | ウエビング巻取装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111101 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120619 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120820 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130128 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160201 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5190434 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S343 | Written request for registration of root pledge or change of root pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316354 |
|
| SZ02 | Written request for trust registration |
Free format text: JAPANESE INTERMEDIATE CODE: R316Z02 |
|
| S343 | Written request for registration of root pledge or change of root pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316354 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S343 | Written request for registration of root pledge or change of root pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316354 |
|
| SZ02 | Written request for trust registration |
Free format text: JAPANESE INTERMEDIATE CODE: R316Z02 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |