JP2010029314A - 消火器具搬送装置 - Google Patents
消火器具搬送装置 Download PDFInfo
- Publication number
- JP2010029314A JP2010029314A JP2008192833A JP2008192833A JP2010029314A JP 2010029314 A JP2010029314 A JP 2010029314A JP 2008192833 A JP2008192833 A JP 2008192833A JP 2008192833 A JP2008192833 A JP 2008192833A JP 2010029314 A JP2010029314 A JP 2010029314A
- Authority
- JP
- Japan
- Prior art keywords
- fire
- fire extinguishing
- fire extinguisher
- unit
- extinguisher
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Fire-Extinguishing By Fire Departments, And Fire-Extinguishing Equipment And Control Thereof (AREA)
Abstract
【解決手段】消火器具搬送装置6は、消火剤を放出する消火器具5を移動させる移動部60と、消火器具5を移動部60によって火災の発生位置に移動させるための誘導情報を取得し、当該取得した誘導情報に基づき移動部60の制御を行う誘導部64とを備える。誘導部64は、移動部60が移動させた消火器具5の周囲の環境状態を特定する輻射センサ66と、輻射センサ66によって特定された輻射熱流束に基づき、消火器具5の現在位置において、人間が安全に消火活動を行うことができるか否かを判定する安全判定部68bと、安全判定部68bの判定結果に応じて、人間が安全に消火活動を行うことができる範囲内に消火器具5を位置させるように移動部60の制御を行う安全範囲維持部68cとを備える。
【選択図】図1
Description
まず、各実施の形態に共通の基本的概念について説明する。各実施の形態に係る消火器具搬送装置は、火災発生現場まで消火器具を搬送することを目的とするものである。
次に、本発明に係る各実施の形態の具体的内容について説明する。
まず実施の形態1について説明する。この形態は、消火剤タンクを備えた消火器を火災の発生位置に移動させ、安全範囲内に位置させる形態である。
まず、防災システムの構成を説明する。図1は、防災システム及び消火器具搬送装置の電気的構成を示したブロック図である。図1に示すように、防災システム1は、防災受信機2、火災感知器3、格納ボックス4、消火器具5、及び、消火器具搬送装置6を備えている。
次に、消火器具搬送装置6の構成を説明する。消火器具搬送装置6は、図1及び図4に示すように、移動部60、カメラ61、案内出力部62(図4に図示せず)、通信部63(図4に図示せず)、誘導部64(図4に図示せず)、及び、記録部65(図4に図示せず)を備えている。
移動部60は、消火器具5を搭載した消火器具搬送装置6を移動させるための移動手段である。移動手段の具体的な構成は任意であり、例えば図4に示したように、消火器具搬送装置6を駆動させる駆動輪、駆動輪を動作させるためのモータ(図示せず)、モータの動力を供給するバッテリ(図示せず)等を用いて構成することができる。この移動部60は、後述する制御部68の誘導制御部68aによって制御される。
カメラ61は、消火器具搬送装置6の周囲を撮影し、当該撮影したデータを制御部68に出力する。この撮影データに基づいて後述する火源距離特定部68dが火源との間の距離を特定するため、2台のカメラ61を並列配置し、ステレオ撮影を行うことが望ましい。また、火炎の存在を特定するため、炎センサをカメラ61に併設することができる。
案内出力部62は、火災発生位置まで消火器具5を移動させた場合において、当該消火器具5に関する案内情報を出力する案内手段である。具体的には、音声情報として案内情報を出力するためのスピーカや、画像情報として案内情報を出力するためのモニタ等を案内出力部62として設けることができる。
通信部63は、消火器具搬送装置6を起動するための起動信号や、消火器具搬送装置6に搭載された消火器具5を火災の発生位置に移動させるための誘導情報を防災システム1から取得するための通信手段である。具体的な通信方法は任意であり、例えば、無線あるいは有線の通信により起動信号や誘導情報を受信させることができる。
誘導部64は、消火器具5を移動部60によって火災の発生位置に移動させるための誘導情報を取得し、当該取得した誘導情報に基づき、移動部60の動作の制御を行う誘導手段であり、輻射センサ66、測位部67(図4に図示せず)、及び、制御部68(図4に図示せず)を備えている。
記録部65は、制御部68によって実行される各種処理に必要なデータ、例えば、安全判定部68bが判定を行う際の基準となる閾値や、安全範囲維持部68cが移動部60の制御を行う場合に参照する制御テーブル等を記録する記録手段である。図5は、記録部65が記録している制御テーブルを例示した表である。なお、制御テーブルの具体的内容については、制御部68によって実行される処理の説明と併せて後述する。
次に、消火器具搬送装置6の制御部68が実行する消火器具搬送処理について説明する。図6は消火器具搬送処理の流れを示したフローチャート、図7は火災発生位置付近に到達した消火器具搬送装置6を示した図である。
このように実施の形態1によれば、移動部60によって消火器具5を火災の発生位置まで移動させるので、火災検出時に迅速に火災発生現場まで消火器具5を搬送し、消火活動を容易に開始させることができる。
次に実施の形態2について説明する。この形態は、消火栓の放水ノズルを火災の発生位置に移動させ、安全範囲内に位置させる形態である。
図8は、本実施の形態2に係る格納ボックス4及び消火器具搬送装置6の外観図であり、図8(a)は消火器具搬送装置6の格納時における格納ボックス4の正面図、図8(b)は移動時における消火器具搬送装置6を示す図である。なお、図8では、筐体40の内部を表すためスロープ扉41の図示を省略している。
このように実施の形態2によれば、移動部60によって消火栓の放出ノズル52を火災の発生位置まで移動させるので、ホース55を引出す力のない女性や老人でも容易に消火栓を用いた消火活動を行うことができる。
以上、本発明に係る各実施の形態について説明したが、本発明の具体的な構成及び手段は、特許請求の範囲に記載した各発明の技術的思想の範囲内において、任意に改変及び改良することができる。以下、このような変形例について説明する。
まず、発明が解決しようとする課題や発明の効果は、前記した内容に限定されるものではなく、本発明によって、前記に記載されていない課題を解決したり、前記に記載されていない効果を奏することもでき、また、記載されている課題の一部のみを解決したり、記載されている効果の一部のみを奏することがある。
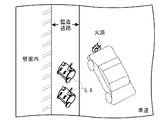
上記の各実施の形態においては、格納ボックス4をトンネル壁面内に設置した場合を例に挙げて説明したが、図2に示した監査通路や、トンネルの車退避場所、或いは避難口に設置することもできる。この場合、消火器具搬送装置6が、格納ボックス4から車道に退出し、当該車道を移動するようにしてもよい。
上記の各実施の形態においては、消火器具搬送装置6は環境状態特定手段として輻射センサ66を備えているが、さらに熱感知器を設けてもよい。放水中に熱感知器によって周囲の高い熱を検知した場合は、消火作業を中止し退避をする旨の案内情報を周囲の人間に対して案内出力部62によって出力させることができる。
消火器具搬送装置6は、火災時には火災現場に近づいて待機し、人に消火作業を行ってもらう旨の案内情報を案内出力部62によって出力させることができる。
上記の各実施の形態においては、駆動輪によって消火器具搬送装置6を自在に移動させる構成を例に挙げて説明したが、消火対象となる領域内に敷設されたレール上を移動させる構成としてもよい。この場合は、駆動輪によってレール上を移動させてもよく、あるいはリニアモーター等の他の駆動方式を用いて移動させてもよい。
上記の各実施の形態においては、環境状態特定手段として輻射センサ66を用いる場合を例示して説明したが、雰囲気温度を測定する温度センサや、CO濃度を測定するCOセンサ等を用いることができる。この場合においても、これらのセンサによって測定された測定値と、予め定めた閾値との比較に基づいて、安全判定部68bによって安全判定を行わせることができる。
上記の各実施の形態においては、測位部67はRFIDタグリーダ67aを備えていると説明したが、GPS(Global Positioning System)を用いて測位部67を構成することもできる。この場合には、火災発生位置を緯度・経度等で特定する位置情報を誘導情報とすることができる。
上記の各実施の形態においては、通信部63は起動信号や誘導情報を防災システム1から受信すると説明したが、カメラ61が撮影した撮影データや、輻射センサ66が測定した輻射熱流束に関するデータ等を防災システム1に送信させてもよい。また、消火器具搬送装置6にマイクを設け、当該マイクによって取得した音声情報を通信部63によって防災システム1に送信させてもよい。これにより、防災システム1を介して管理センター等との間で相互に通信を行い、管理センターのオペレーターによって火災現場の状況を適切に把握させたり、オペレーターから火災現場の人に対して消火活動や避難に関する適切な指示を行わせたりすることができる。
上記の各実施の形態においては、誘導制御部68aは移動障害が発生したものと判定した場合、消火器具搬送装置6の移動を停止させると説明したが、カメラ61が撮影した撮影データに基づき、障害物や人間を回避し、火災発生位置への移動を継続するように移動部60を制御させてもよい。
2 防災受信機
3 火災感知器
4 格納ボックス
5 消火器具
6 消火器具搬送装置
40 筐体
41 スロープ扉
42 設置台
43、63 通信部
44 開閉制御部
50 消火剤タンク
51 封止バルブ
52 放出ノズル
53 操作部
54 放出制御部
55 ホース
60 移動部
61 カメラ
62 案内出力部
64 誘導部
65 記録部
66 輻射センサ
67 測位部
67a RFIDタグリーダ
68 制御部
68a 誘導制御部
68b 安全判定部
68c 安全範囲維持部
68d 火源距離特定部
68e 消火制御部
Claims (5)
- 消火剤を放出する消火器具を移動させる移動手段と、
前記消火器具を前記移動手段によって火災の発生位置に移動させるための誘導情報を取得し、当該取得した誘導情報に基づき前記移動手段の制御を行う誘導手段と、
を備えることを特徴とする消火器具搬送装置。 - 前記誘導手段は、
前記移動手段が移動させた前記消火器具の周囲の環境状態を特定する環境状態特定手段と、
前記環境状態特定手段によって特定された環境状態に基づき、前記消火器具の現在位置において、人間が安全に消火活動を行うことができるか否かを判定する安全判定手段と、
前記安全判定手段の判定結果に応じて、人間が安全に消火活動を行うことができる範囲内に前記消火器具を位置させるように前記移動手段の制御を行う安全範囲維持手段と、
を備えることを特徴とする請求項1に記載の消火器具搬送装置。 - 前記環境状態特定手段は、
前記消火器具に輻射される輻射熱流束を測定し、
前記安全判定手段は、
前記環境状態特定手段にて測定された輻射熱流束と、予め定められた閾値との比較に基づいて、人間が安全に消火活動を行うことができるか否かを判定すること、
を特徴とする請求項1又は2に記載の消火器具搬送装置。 - 前記消火器具と火源との間の距離を特定する火源距離特定手段と、
前記移動手段が前記消火器具を前記火源から離れさせる場合において、前記火源距離特定手段が特定した火源距離に基づき、前記消火器具によって前記消火剤を前記火源に到達させることが可能な有効射程内から有効射程外に当該消火器具を前記移動手段が移動させるか否かを判定し、移動させると判定した場合に、前記消火器具によって前記消火剤を放出させる消火制御手段と、
を備えることを特徴とする請求項1から3のいずれか一項に記載の消火器具搬送装置。 - 前記消火器具に関する案内情報を出力する案内手段を備えること、
を特徴とする請求項1から4のいずれか一項に記載の消火器具搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008192833A JP5123775B2 (ja) | 2008-07-25 | 2008-07-25 | 消火器具搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008192833A JP5123775B2 (ja) | 2008-07-25 | 2008-07-25 | 消火器具搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010029314A true JP2010029314A (ja) | 2010-02-12 |
| JP5123775B2 JP5123775B2 (ja) | 2013-01-23 |
Family
ID=41734528
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008192833A Expired - Fee Related JP5123775B2 (ja) | 2008-07-25 | 2008-07-25 | 消火器具搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5123775B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010069008A (ja) * | 2008-09-18 | 2010-04-02 | Hidemi Chijiiwa | 屋外防災ボックス |
| JP2017213011A (ja) * | 2016-05-30 | 2017-12-07 | ホーチキ株式会社 | 防災連携システム |
| WO2018083798A1 (ja) * | 2016-11-07 | 2018-05-11 | 株式会社ラムロック | 監視システム及び移動ロボット装置 |
| JP2018161429A (ja) * | 2017-03-27 | 2018-10-18 | 能美防災株式会社 | 消火栓装置 |
| JP2019016119A (ja) * | 2017-07-05 | 2019-01-31 | 能美防災株式会社 | 火災監視システム |
| JP2019024813A (ja) * | 2017-07-28 | 2019-02-21 | 能美防災株式会社 | 消火システム |
| JP2020185256A (ja) * | 2019-05-16 | 2020-11-19 | 能美防災株式会社 | 可搬式火災感知・消火装置 |
| JP2021171256A (ja) * | 2020-04-23 | 2021-11-01 | 消防庁長官 | ロボット部署位置計算装置及びプログラム |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101836121B1 (ko) * | 2017-08-07 | 2018-04-19 | (주)경문기술단 | 소화기 위치확인이 가능한 자동 입출 매립형 소화설비 |
| CN109940631B (zh) * | 2019-03-13 | 2021-01-12 | 浙江华消科技有限公司 | 夹持单元、机械臂组件、机器人及其机器人的控制方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0326660U (ja) * | 1989-07-26 | 1991-03-18 | ||
| JPH11128381A (ja) * | 1997-10-27 | 1999-05-18 | Hochiki Corp | 消火栓装置及び消火栓装置を備えたトンネル防災システム |
| JP2000126324A (ja) * | 1998-10-22 | 2000-05-09 | Nippon Signal Co Ltd:The | 消火ロボット及び消火システム |
-
2008
- 2008-07-25 JP JP2008192833A patent/JP5123775B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0326660U (ja) * | 1989-07-26 | 1991-03-18 | ||
| JPH11128381A (ja) * | 1997-10-27 | 1999-05-18 | Hochiki Corp | 消火栓装置及び消火栓装置を備えたトンネル防災システム |
| JP2000126324A (ja) * | 1998-10-22 | 2000-05-09 | Nippon Signal Co Ltd:The | 消火ロボット及び消火システム |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010069008A (ja) * | 2008-09-18 | 2010-04-02 | Hidemi Chijiiwa | 屋外防災ボックス |
| JP2017213011A (ja) * | 2016-05-30 | 2017-12-07 | ホーチキ株式会社 | 防災連携システム |
| WO2018083798A1 (ja) * | 2016-11-07 | 2018-05-11 | 株式会社ラムロック | 監視システム及び移動ロボット装置 |
| JPWO2018083798A1 (ja) * | 2016-11-07 | 2019-09-19 | 株式会社ラムロック | 監視システム及び移動ロボット装置 |
| US11377210B2 (en) | 2016-11-07 | 2022-07-05 | Ramrock, Co., Ltd. | Monitoring system and mobile robot device |
| JP2018161429A (ja) * | 2017-03-27 | 2018-10-18 | 能美防災株式会社 | 消火栓装置 |
| JP2019016119A (ja) * | 2017-07-05 | 2019-01-31 | 能美防災株式会社 | 火災監視システム |
| JP7093164B2 (ja) | 2017-07-05 | 2022-06-29 | 能美防災株式会社 | 火災監視システム |
| JP2019024813A (ja) * | 2017-07-28 | 2019-02-21 | 能美防災株式会社 | 消火システム |
| JP2020185256A (ja) * | 2019-05-16 | 2020-11-19 | 能美防災株式会社 | 可搬式火災感知・消火装置 |
| JP2021171256A (ja) * | 2020-04-23 | 2021-11-01 | 消防庁長官 | ロボット部署位置計算装置及びプログラム |
| JP7533885B2 (ja) | 2020-04-23 | 2024-08-14 | 消防庁長官 | ロボット部署位置計算装置及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5123775B2 (ja) | 2013-01-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5123775B2 (ja) | 消火器具搬送装置 | |
| KR101725774B1 (ko) | 스마트 소방 대피 시스템 | |
| KR101792766B1 (ko) | 스마트 화재 감지 장치 | |
| KR101841761B1 (ko) | 건설현장 임시소방시설용 화재감지 및 대피유도 시스템 | |
| US10553086B2 (en) | Social safety network system having portable light for both wireless disaster fire detection and crime prevention | |
| KR102331004B1 (ko) | 공동주택용 무선 화재 감시로봇 | |
| US20150254952A1 (en) | Platform of Smart Security Protection Integrated System | |
| KR101828994B1 (ko) | 지능형 통합 방재 시스템 및 방법 | |
| KR101439860B1 (ko) | 실시간 화재 감지 시스템 및 그 감지 방법 | |
| JP2005520074A (ja) | 安全システム | |
| KR101018583B1 (ko) | 지능형 소방 방재 시스템 | |
| KR20210030204A (ko) | 코브라 소화기 장전식 자동소화장치 | |
| JP2010046316A (ja) | 消火システム | |
| KR101436471B1 (ko) | 질식사고를 방지하는 이산화탄소 안전 소화설비 및 이산화탄소 안전 소화방법 | |
| CN114299684A (zh) | 保持电梯安全运行的火灾报警系统 | |
| KR101784290B1 (ko) | 전개노즐이 구비된 국부용 소방시스템 | |
| KR101897756B1 (ko) | 대피자 맞춤형 피난정보 제공 시스템 및 방법 | |
| KR101897757B1 (ko) | 화재분석을 통한 최적의 피난경로 제공 시스템 및 방법 | |
| KR20190046297A (ko) | 이산화탄소를 이용한 안전 소화 시스템 | |
| KR101794962B1 (ko) | 비상문 자동 개폐 관리 시스템 | |
| JP7712311B2 (ja) | 消火設備 | |
| KR101524779B1 (ko) | 금연구역 소화 시스템 | |
| JP5911143B2 (ja) | 消火設備および消火装置 | |
| KR102130845B1 (ko) | 고층 건물 화재 진압 및 대피 설비 | |
| KR200466854Y1 (ko) | 화재 발생 표시 및 진압 박스 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110519 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120418 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120426 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120622 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121003 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121026 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5123775 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |