JP2010027770A - 処理装置 - Google Patents
処理装置 Download PDFInfo
- Publication number
- JP2010027770A JP2010027770A JP2008185878A JP2008185878A JP2010027770A JP 2010027770 A JP2010027770 A JP 2010027770A JP 2008185878 A JP2008185878 A JP 2008185878A JP 2008185878 A JP2008185878 A JP 2008185878A JP 2010027770 A JP2010027770 A JP 2010027770A
- Authority
- JP
- Japan
- Prior art keywords
- light
- chamber
- etching
- light detection
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Drying Of Semiconductors (AREA)
Abstract
【課題】従来の可視光モニタリングによるエッチングの終点検出では、モニタリング用の窓が曇ると、そこを通る可視光の透過度が低下して検出精度が落ちてしまう。
【解決手段】本発明のドライエッチング装置は、被加工物となる半導体基板をドライエッチング処理するエッチングチャンバー2と、エッチングチャンバー2の側壁に設けられた窓4を通して、ミリ波・サブミリ波の光を検出する光検出部3とを備え、光検出部3の検出結果を用いて、エッチングの終点を検出する。
【選択図】図1
【解決手段】本発明のドライエッチング装置は、被加工物となる半導体基板をドライエッチング処理するエッチングチャンバー2と、エッチングチャンバー2の側壁に設けられた窓4を通して、ミリ波・サブミリ波の光を検出する光検出部3とを備え、光検出部3の検出結果を用いて、エッチングの終点を検出する。
【選択図】図1
Description
本発明は、処理装置に関する。詳しくは、被加工物を処理する処理装置に関する。さらに詳しくは、半導体製造装置に適用して好適な処理装置に関する。
半導体の分野では、半導体デバイスの微細化により、加工精度の高精度化が要求されている。加工時には反応性ガスなどの化学反応によって生成される反応生成物量が加工の形状や寸法などに大きく影響する。このため、加工精度を上げるには、正確な反応生成物量の予測とそれに基づくプロセス制御の最適化が必要不可欠となる。半導体装置の製造分野では、例えばプラズマを用いたドライエッチング加工のモニタリング技術として、OES(Optical Emission Spectrometer)による可視光モニタリングが知られている(例えば、非特許文献1を参照)。
また、半導体分野における可視光、赤外線領域での粒子の輝線・吸収線から粒子の物理情報を得る測定方法としては、LIF法(Laser Induced Fluorescence)やIRLAS法(Infrared Laser Absorption Spectroscopy)が用いられている。これらは、いずれもレーザービームをチャンバー内に導入する方法である。これらの方法では、測定器自体が大掛かりなものとなる。また、レーザービームをチャンバー内に導入するため、プロセス中でのガス組成に影響を与えてしまう(即ち、加工に影響を与える)。このため、半導体製造分野では、プラズマを用いて加工する際のモニタリング技術として、もっぱらOESによる可視光モニタリング技術が利用されている。
辰巳哲也、3.フルオロカーボンプラズマのモニタリング、「2007 The Japan Society of Plasma Science and Nuclear Fusion Research」、2007年、Vol.83、No.4、p.325-329
OESによる可視光モニタリングでは、チャンバーの壁に設けられたモニタリング用の窓を通して、プラズマ中での発光状態を可視光域でモニタリングする。その際、例えばエッチングのプロセス中に生じる反応生成物の付着によってモニタリング用の窓が曇ると、そこで可視光の透過度が低下する。このため、エッチング終点検出の精度が落ちてしまう。また、パターン開口率やプロセスによっては、可視光によるエッチング終点検出が困難なケースもある。具体的には、パターン開口率が低い場合や、低バイアスを用いたプロセス、CDE(Chemical Dry Etching)のプロセスなどで、可視光によるエッチング終点検出が困難なケースがある。
また、既存の半導体製造装置では、OESによる可視光モニタリングのみが行なわれ、プロセス制御という観点からは、モニタリング結果から得られる輝線データがエッチングの終点検出(EPD:End Point Detector)にのみ利用されているのが現状である。しかしながら、現行の可視光モニタリングだけでは限界があり、次世代、次々世代デバイスの開発・生産には新しいモニタリング技術を用いた半導体製造方法やこれを実現する半導体製造装置が必要となる。
本発明に係る処理装置は、被加工物を処理する処理室と、前記処理室の壁に設けられた窓を通して、ミリ波及びサブミリ波のうちの少なくとも一方の光を検出する光検出手段とを備える。
本発明に係る処理装置においては、処理室の内部で粒子から発せられるミリ波やサブミリ波の光を、処理室の壁に設けられた窓を通して、光検出手段で検出することにより、可視光よりもエネルギー準位の低い帯域で、処理室内の粒子が発生する光の輝線強度や連続波強度をモニタリングすることが可能となる。また、被加工物の処理中に窓が曇った場合でも、ミリ波・サブミリ波の光は、窓の雲による透過率の低下を殆ど起こさない。
本発明に係る処理装置によれば、可視光の検出ではエッチングの終点検出が困難な場合にも、エッチングの終点を正確に検出することが可能となる。また、被加工物の処理中に窓が曇った場合でも、その影響を殆ど受けることなく、エッチングの終点を正確に検出することが可能となる。
以下、本発明の実施の形態について図面を参照しつつ詳細に説明する。なお、本発明の技術的範囲は以下に記述する実施の形態に限定されるものではなく、発明の構成要件やその組み合わせによって得られる特定の効果を導き出せる範囲において、種々の変更や改良を加えた形態も含む。
半導体製造装置の内部では反応生成物のエネルギー励起によって輝線が発生する。この輝線は、可視光領域(電子遷移による輝線)だけでなく、より低エネルギー領域であるミリ波・サブミリ波領域(回転遷移/(超)微細構造遷移)にまで跨って存在していると考えられる。つまり、並進エネルギーを除いた粒子の持つ内部エネルギーEtot は、次の(1)式のように、電子遷移Eelect 、振動遷移Evib 、回転/(超)微細構造遷移Erot の和として表される。
Etot =Eelect +Evib +Erot …(1)
ここで、反応生成物が生成されるチャンバー(処理室)の内部が熱平衡状態であると仮定すると、チャンバー内に存在する粒子は、ボルツマン分布に従って、上記のエネルギー準位において個数分布をもつ。よって、可視光(高エネルギー準位)からミリ波・サブミリ波(低エネルギー準位)までの広帯域領域にわたって光(輝線/連続波)の検出を行なうことにより、初めて粒子の正確な物理情報(フラックス量、密度、温度)を知ることができる。その結果、より高い精度を持ったプロセス・加工形状制御やチャンバークリーニングの最適化が可能になる。
そこで本発明においては、被加工物を処理する処理室(チャンバー)と、この処理室の壁に設けられた窓を通して、ミリ波及びサブミリ波のうちの少なくとも一方の光を検出する光検出手段とを備える処理装置を提案する。ミリ波やサブミリ波の光は、可視光や赤外線よりも低エネルギーの粒子が発生し、その発生源は処理室内に存在する粒子となる。このため、光検出手段は、処理室内の粒子が発生するミリ波及びサブミリ波のうちの少なくとも一方の光を、処理室の壁に設けられた窓を通して受けることになる。したがって、例えばドライエッチングプロセスにおいては、ミリ波やサブミリ波の光の検出に際して、プロセス中のガスの状態に影響を与えることがない。
また、ミリ波・サブミリ波の帯域は、可視光・赤外線の帯域よりも低エネルギー側となる。このため、既存の可視光モニタリングと比較して、エネルギーの低い粒子が発生する光を検出し、この検出結果に基づいて低エネルギー粒子の物理情報を得ることができる。例えば、ミリ波やサブミリ波の光検出結果に基づく複数スペクトルデータ(強度と線幅)を用いて、局所熱力学平衡(LTE: Local Thermodynamic Equilibrium)を仮定又はNon-LTEでのエネルギー準位の詳細平衡の式を解くことにより、粒子のフラックス量、密度、温度(並進、振動、回転温度)などの物理情報や、当該物理情報の時間変動といった、プロセス制御、加工寸法制御に必要な情報を高精度に得ることができる。
なお、「ミリ波及びサブミリ波のうちの少なくとも一方」という表現は、「ミリ波のみ」、「サブミリ波のみ」、「ミリ波とサブミリ波の両方」という意味を併せ持つ表現である。より広い帯域で輝線を検出するうえでは、「ミリ波とサブミリ波の両方」を検出する構成とすることが望ましい。このため、本発明の第2の実施の形態においては、「ミリ波とサブミリ波の両方」を検出することを前提とする。その他の実施の形態においては、この限りではない。具体的な事例として、以下のような実施の形態を提案する。
具体的な実施の形態の説明に先立って、ミリ波の帯域とサブミリ波の波長帯域を明示すると、それらの波長帯域は、マイクロ波と赤外線の間に位置するものとなる。詳しくは、ミリ波の波長は、マイクロ波の波長よりも短く、サブミリ波の波長よりも長いものとなる。サブミリ波の波長は、ミリ波の波長よりも短く、赤外線の波長よりも長いものとなる。ミリ波の波長帯域は、概ね1mm〜1cmの幅で規定され、サブミリ波の帯域は、概ね0.1mm〜1mmの幅で規定される。
(第1の実施の形態)
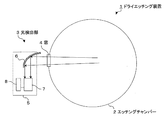
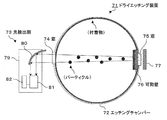
図1は本発明の第1の実施の形態に係る処理装置として、半導体製造装置の一つであるドライエッチング装置の構成を示す平面図である。図示したドライエッチング装置1においては、処理室となるエッチングチャンバー2の外側に、ミリ波・サブミリ波(本書で「・」はandの意味)の光(輝線)を検出する光検出部3が配置されている。
図1は本発明の第1の実施の形態に係る処理装置として、半導体製造装置の一つであるドライエッチング装置の構成を示す平面図である。図示したドライエッチング装置1においては、処理室となるエッチングチャンバー2の外側に、ミリ波・サブミリ波(本書で「・」はandの意味)の光(輝線)を検出する光検出部3が配置されている。
エッチングチャンバー2は、反応性ガスによるプラズマを用いてエッチングを行なうためのチャンバーであり、例えば、CCP(Capacitive Coupled Plasma)エッチングチャンバーによって構成される。
なお、本発明の第1の実施の形態を適用する対象となるドライエッチング装置は、反応性ガスプラズマを利用してエッチングを行なうドライエッチング装置であれば、その種類を問わない。例えば、ICP(Inductive Coupled Plasma)ドライエッチング装置、ECR(Electro Cycrotoron Resonance)ドライエッチング装置、CDE(Chemical Dry Etching)装置などに適用してもよい。
エッチングチャンバー2は、全体的に円筒形状に形成されている。エッチングチャンバー2の内部では、反応性ガスプラズマを利用して、被加工物となる半導体基板のエッチングが行なわれる。エッチングチャンバー2の壁(側壁)には、モニタリング用の窓4が設けられている。窓4の大きさ(開口面積)は、エッチングチャンバー2内のモニタリング領域を決定する要素となるため、所望するモニタリング領域に応じて、例えば5cm四方に設定されている。窓4は、光透過性を有する板状の部材を用いて構成されている。窓4の窓材としては、例えば、SiO2、Al2O3、ポリイミドフィルム、ポリエステルフィルムなど]を設ける。既存のドライエッチング装置のチャンバーには可視光モニタリング用の窓が設けられているので、これを代用してもよい。その場合は、既存のドライエッチング装置のチャンバーをそのまま利用して光検出部3を組み合わせることができる。
光検出部3は、ステージ5と、ミラー6と、受信機7と、分光計8とを用いて構成されている。ステージ5は、例えばエッチングチャンバー2の中心を回転中心として、円周方向に回転移動可能に設けられている。ただし、ステージ5の移動は、回転移動(周回移動)に限らず、一軸の直線移動でも、二軸(X軸、Y軸)の直線移動でも、当該二軸にθ軸を加えた三軸の移動(直線移動と回転移動を組み合わせたもの)でもよい。ステージ5には、ミラー6、受信機7及び分光計8が搭載されている。
ミラー6は、凹面状の反射面を有するものである。ミラー6は、エッチングチャンバー2内で発生し、かつ窓4を通してチャンバー外に漏れる光を全反射する光学素子となる。受信機7は、ミラー6で反射された光の波長帯のうち、ミリ波・サブミリ波帯域の光の波を高感度に受信するものである。受信機7としては、例えば、ヘテロダイン方式を採用し、超伝導体を電極としたトンネル接合素子SIS(Superconductor- Insulator-Superconductor)ミキサー受信機(以下、「超伝導トンネル接合素子SISミキサー受信機」)を好適に用いることができる。SISミキサーは機械的冷凍機によって4Kに冷却される。分光計8は、受信機7で受信したミリ波・サブミリ波帯域の光を分光するものである。分光計8としては、例えば、音響光学型分光計(AOS: Acousto-Optical Spectrometer)やデジタル分光計などを好適に用いることができる。
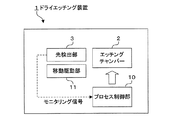
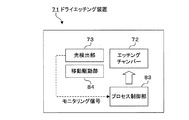
図2は本発明の第1の実施の形態に係るドライエッチング装置の概念図である。ドライエッチング装置1は、大きくは、前述したエッチングチャンバー2と光検出部3の他に、プロセス制御部10と、移動駆動部11とを備えた構成となっている。
プロセス制御部10は、エッチングチャンバー2に対して、当該エッチングチャンバー2に各種の動作信号を送信することにより、エッチングチャンバー2によって行なわれる処理(本形態例ではドライエッチングプロセス)を制御するものである。また、プロセス制御部10は、エッチング中に光検出部3から入力されるモニタリング信号(検出信号)を取り込み、このモニタリング信号に基づく光強度の変化からエッチングの終点検出を行ない、エッチングチャンバー2の動作を停止させるタイミングを制御する。光検出部3が出力するモニタリング信号は、モニタリングの対象とする波長帯域(本形態例ではミリ波・サブミリ波の帯域)の光の強度とスペクトル幅(半値幅)を示す信号となる。光の強度は、原子や分子の存在量を反映したものになる。光のスペクトル幅は、原子や分子の運動(移動の速さ)を表す指標となり、温度を反映したものとなる。移動駆動部11は、ステージ5を移動させるための駆動部である。ステージ移動のための駆動源としては、例えばモータを用いることができる。
上記構成からなるドライエッチング装置1においては、エッチング中にエッチングチャンバー2内で発生するミリ波・サブミリ波の光が、ミラー6を経由して受信機7に取り込まれた後、分光計8で分光される。これにより、光検出部3でミリ波・サブミリ波のモニタリングが行なわれる。具体的には、エッチング中にエッチングチャンバー2内で生じるプラズマ発光の経時的な状態変化を、ミリ波・サブミリ波帯域の光強度の変化として光検出部3で検出し、その検出結果をモニタリング信号としてプロセス制御部10に与える。そうすると、プロセス制御部10は、光検出部3から与えられるモニタリング信号を用いて、エッチングの終点を検出する。ミリ波・サブミリ波帯域の光のうち、いずれの帯域の光(輝線)強度の変化に基づいてエッチングの終点検出を行なうかは、被エッチング材料の種類によって異なる。
例えば、BARCのエッチングに際しては、低エネルギーCOの回転遷移(J=3-2: 345 GHz、J=7-6: 807 GHz)やCの微細構造遷移(3P1-3P0: 492 GHz, 3P2-3P1: 809 GHz)によって生じる光(輝線)の強度変化に基づいてエッチングの終点検出を行なう。また、アルミニウムのエッチングでは、AlCl(J=11-10: 160 GHz)やAlF(J=5-4: 165 GHz)の回転遷移によって生じる光(輝線)の強度変化に基づいてエッチングの終点検出を行なう。また、シリコンのエッチングではHBr(J=1-0: 505 GHz)、SiBr、SiCl(115-161 GHz)、SiO(J=7-6: 304 GHz)などの回転遷移によって生じる光(輝線)の強度変化に基づいてエッチングの終点検出を行なう。また、有機膜のエッチングではSiN(N=3-2: 131 GHz)、CF(J=3/2-1/2: 124 GHz)、SiC(J=6-5: 236 GHz)、有機分子などの回転遷移によって生じる光(輝線)の強度変化に基づいてエッチングの終点検出を行なう。ミリ波・サブミリの波帯にあり、光強度変化でエッチング終点を検出できる粒子であれば、この限りではない。
プロセス制御部10は、光検出部3から与えられるモニタリング信号に基づいてエッチングの終点を検出すると、エッチングチャンバー2に対してプロセス(ステップ)終了の動作信号を送る。これにより、エッチングの終点検出と同期して、エッチングチャンバー2でのエッチングプロセスが終了となる。
ドライエッチングプロセスにおいて、低エネルギープロセスやラジカル粒子を主なエッチャントとするCDE(Chemical Dry Etching)などでは、既存の可視光検出でエッチングの終点を検出することが難しい。また、可視光検出では、窓の曇りによって可視光の透過度が低下するため、エッチング終点検出の精度が悪化する。これに対して、本発明の第1の実施の形態に係るドライエッチング装置1を用いた場合は、ミリ波・サブミリ波帯域の光検出を行なうことによって、より正確にエッチングの終点検出を行なうことができる。また、低エネルギープロセスでは窓の曇りが起こりにくくなり、仮に曇ったとしても、ミリ波・サブミリ波帯域の光は、曇りによる透過率の低下を殆ど起こさないため、可視光に比較して、透過度の低下度合いが格段に小さくなる。このため、光強度の変化に基づいてエッチングの終点検出を正確に行なうことができる。
また、上記構成のドライエッチング装置1では、光検出部3のステージ5を移動駆動部11により移動させることで、光検出部3の受光方向が変化し、エッチングチャンバー2内で光検出の対象となる位置が変化する。このため、例えば予めステージ移動に係る移動シークエンスのレシピを組んでおき、そのレシピにしたがって移動駆動部11がステージ5を移動する構成とすることで、プロセス中に自動でマッピング計測を行なうことができる。そして、エッチングチャンバー2内で発生する光をステージ移動によるマッピング計測で二次元的に検出すれば、光の二次元的な強度分布を示すマッピングデータを取得することができる。
なお、上記第1の実施の形態においては、ミリ波・サブミリ波帯域の光を検出してエッチングの終点検出を行なう装置構成を採用したが、これに限らず、可視光帯域の光を検出する手段と、ミリ波・サブミリ波帯域の光を検出する手段を個別に設けて、エッチングの終点検出を行なう装置構成としてもよい。その場合、可視光に関しては、モニタリング用の窓から光ファイバーで直接、分光計まで導くものとする。また、ミリ波・サブミリ波に関しては、ミラーで反射させたものをホーンアンテナで受信・集光し、さらに導波管を通して受信機へと伝送するものとする。
(第2の実施の形態)
図3は本発明の第2の実施の形態に係る処理装置となるドライエッチング装置(半導体製造装置)の構成を示す平面図である。図示したドライエッチング装置21では、処理室となるエッチングチャンバー22の外側に第1の光検出部23と第2の光検出部24が配置され、これに対応してエッチングチャンバー22の壁(側壁)にモニタリング用の2つの窓25,26が設けられている。本発明の第2の実施の形態を適用する対象となるドライエッチング装置の種類やエッチングチャンバーの機能に関しては、上記第1の実施の形態の場合と同様である。
図3は本発明の第2の実施の形態に係る処理装置となるドライエッチング装置(半導体製造装置)の構成を示す平面図である。図示したドライエッチング装置21では、処理室となるエッチングチャンバー22の外側に第1の光検出部23と第2の光検出部24が配置され、これに対応してエッチングチャンバー22の壁(側壁)にモニタリング用の2つの窓25,26が設けられている。本発明の第2の実施の形態を適用する対象となるドライエッチング装置の種類やエッチングチャンバーの機能に関しては、上記第1の実施の形態の場合と同様である。
第1の光検出部23は、可視光・赤外線帯域の光を個別に検出するものである。第1の光検出部23は、ステージ27と、ミラー28と、ハーフミラー29と、可視光用の分光計30と、赤外線用の受信機31と、赤外線用の分光計32とを用いて構成されている。ステージ27は、例えばエッチングチャンバー22の中心を回転中心として、円周方向に回転移動可能に設けられている。ステージ移動のバリエーションに関しては、上記第1の実施の形態と同様である。ステージ27には、ミラー28、ハーフミラー29、分光計30、受信機31及び分光計32が搭載されている。
ミラー28は、凹面状の反射面を有するものである。ミラー28は、エッチングチャンバー22内で発生し、かつ窓25を通してチャンバー外に漏れる光を全反射する光学素子となる。ハーフミラー29は、平板状に形成されている。ハーフミラー29は、ミラー28によって反射される光の光軸に対して、例えば斜め45度の角度をなして配置されている。ハーフミラー29は、ミラー28によって反射された光のうち、赤外線を反射し、可視光を透過する光学素子となる。
分光計30は、ハーフミラー29を透過した可視光を分光するものである。分光計30としては、例えば、OES(Optical Emission Spectrometer)分光計を好適に用いることができる。受信機31は、ハーフミラー29によって反射された赤外線帯域の光の波を高感度に受信するものである。受信機31としては、例えば、発光入射に伴う温度変化を検出するボロメータ型受信機、光子がPN接合に入射した時に生じる電荷を検出する量子型受信機などを好適に用いることができる。分光計32は、受信機31で受信した赤外線帯域の光を分光するものである。分光計32としては、例えば、フーリエ分光計(FTS: Fourier Transform Spectrometer)を好適に用いることができる。
第2の光検出部24は、ミリ波・サブミリ波帯域の光を個別に検出するものである。第2の光検出部24は、ステージ33と、ミラー34と、ハーフミラー35と、ミリ波用の受信機36と、ミリ波用の分光計37と、サブミリ波用の受信機38と、サブミリ波用の分光計39とを用いて構成されている。
ミラー34は、凹面状の反射面を有するものである。ミラー34は、エッチングチャンバー22内で発生し、かつ窓26を通してチャンバー外に漏れる光を全反射する光学素子となる。ハーフミラー35は、平板状に形成されている。ハーフミラー35は、ミラー34によって反射される光の光軸に対して、例えば斜め45度の角度をなして配置されている。ハーフミラー35は、ミラー34によって反射された光のうち、ミリ波の光を反射し、サブミリ波の光を透過する光学素子となる。
受信機36は、ハーフミラー35で反射されたミリ波帯域の光の波を高感度に受信するものである。受信機36としては、例えば、超伝導トンネル接合素子SISミキサー受信機を好適に用いることができる。分光計37は、受信機36で受信したミリ波帯域の光を分光するものである。分光計37としては、例えば、音響光学型分光計やデジタル分光計などを好適に用いることができる。一方、受信機38は、ハーフミラー35を透過したサブミリ波帯域の光の波を高感度に受信するものである。受信機38としては、例えば、上述したボロメータ型受信機、量子型受信機などを好適に用いることができる。分光計39は、受信機38で受信したサブミリ波帯域の光を分光するものである。分光計39としては、例えば、音響光学型分光計やデジタル分光計などを好適に用いることができる。
このように本発明の第2の実施の形態に係るドライエッチング装置1は、4つの帯域(可視光帯域、赤外線帯域、サブミリ波帯域、ミリ波帯域)の受信機分光計システムを具備している。こうした受信機分光計システムは、検出対象となる光の波長帯に応じて増設することが可能である。
なお、可視光に関しては、モニタリング用の窓から光ファイバーで直接、分光計まで導く。また、ミリ波、サブミリ波、赤外線に関しては、光学系のハーフミラーで分光し、これをホーンアンテナで受信・集光し、さらに導波管を通して受信機へと伝送する。
また、ミリ波・サブミリ波であれば、上述の受信機で生成されたIF(Intermediate Frequency)はアンプで増幅され、上記分光計に導かれて分光される。つまり、周波数空間でのパワー(強度)として出力される。ミリ波・サブミリ波の輝線強度の絶対値TBは、いわゆるchopper-wheel法によって求められたアンテナ温度Taとアンテナ集効率ηから次の(2)のように求まる。
TB=Ta/η …(2)
ここで、アンテナ温度Taは、システム雑音温度Tsys 、On点(ガス)を見たときのパワー:Won、Off点(クリーニング後又はメンテナンス後のNon-Plasma状態)を見たときのパワー:Woff を用いて、次の(3)式のように表すことができる。
Ta=(Won−Woff )Tsys/Woff …(3)
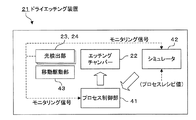
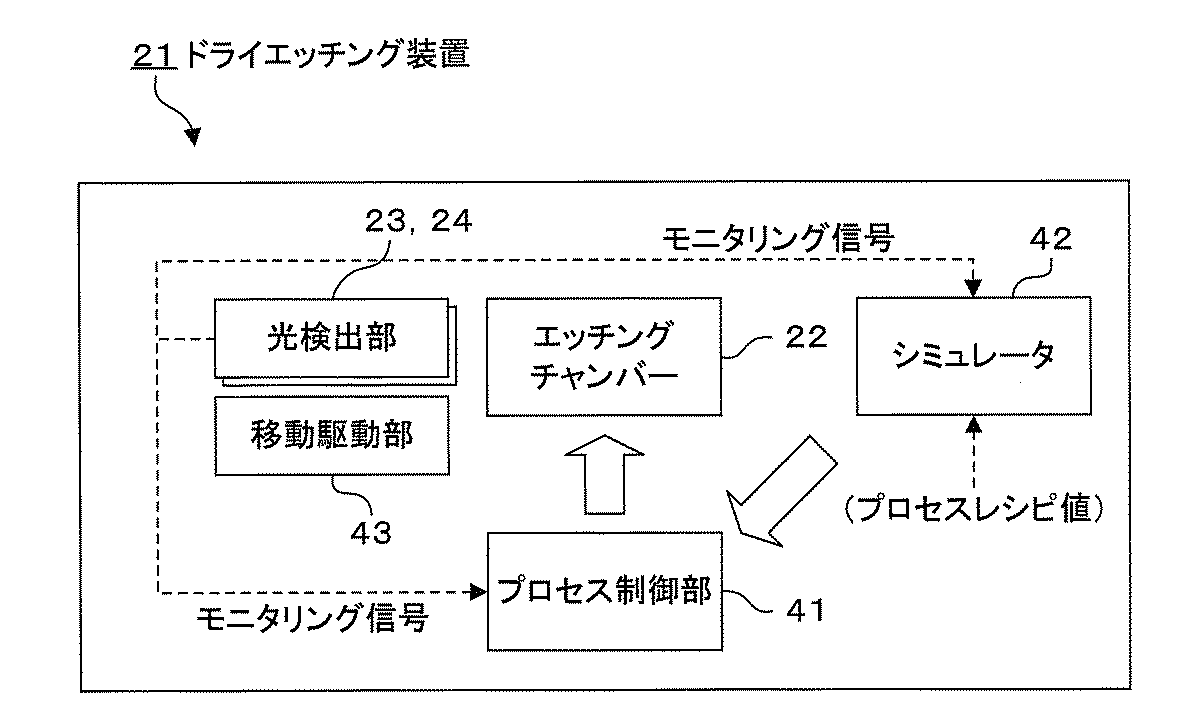
図4は本発明の第2の実施の形態に係るドライエッチング装置の概念図である。ドライエッチング装置21は、大きくは、前述したエッチングチャンバー22と2つの光検出部23,24の他に、プロセス制御部41と、シミュレータ42と、移動駆動部43とを備えた構成となっている。移動駆動部43は、ステージ27,33を個別に移動させるための駆動部である。
プロセス制御部41は、エッチングチャンバー22に対して、当該エッチングチャンバー22に各種の動作信号を送信することにより、エッチングチャンバー22によって行なわれる処理(本形態例ではドライエッチングプロセス)を制御するものである。また、プロセス制御部41は、エッチング中にシミュレータ42から入力されるシミュレーション結果に基づいて、プロセスパラメータの補正を行なうものである。エッチングプロセスの補正対象となるパラメータとしては、例えば、ガス圧力や基板温度(ウェハ温度)などが挙げられる。光制御部23,24からプロセス制御部41に与えられるモニタリング信号は、エッチングの終点検出に用いられる。エッチングの終点検出に関しては、上記第1の実施の形態と同様にミリ波・サブミリ波のモニタリング信号を用いて行なってもよいし、可視光・赤外線のモニタリング信号を用いて行なってもよいし、両方のモニタリング信号を用いて行なってもよい。
シミュレータ42は、被加工物となる半導体基板のパターンの形状/寸法をシミュレーションによって予測するものである。シミュレータ42としては、出願人が先に出願した特願2007−326966号明細書に記載された「形状シミュレータ」を用いることができる。シミュレータ42のシミュレーション結果は、例えば図5のようなGUI(Graphical User Interface)画面でエッチング中にリアルタイムに表示される。図示したGUI画面は、エッチング条件を設定するプロセスウィンドウ、シミュレーション計算に必要な初期条件やエッチング終点検出(EPD)の設定を行なうパラメータウィンドウ、EPDの波形を表示するEPDウィンドウ、シミュレーション計算の結果(パターン予測形状)を表示する計算表示ウィンドウ、各ウィンドウを操作するコントロールウィンドウを含むものとなっている。プロセス管理者は、シミュレーション結果としてGUI画面内に表示されたエッチングパターンの予想形状を目視で確認しながらエッチングプロセスを管理することが可能となっている。
シミュレータ42は、各光検出部23,24から与えられるモニタリング信号(検出信号)とプロセスレシピの設定値(プロセスレシピ値)に基づくシミュレーション結果をプロセス制御部41に送信する。シミュレータ42によるシミュレーションでは、ある膜種のパターンをドライエッチングで加工するにあたり、エッチング中に刻々と変化するターゲットパターンに関する立体角を計算するとともに、当該パターン立体角に基づいてターゲットパターンの表面(被加工面)に付着する反応生成物量(堆積物量)を予測する。ターゲットパターンは、加工対象となるパターンである。反応生成物量は、パターン開口率とパターン立体角の積で表すことができる。パターン開口率とは、半導体基板(ウエハ)の表面に占めるパターン開口の面積比率をいう。被加工物のエッチング量は、被加工面に付着する反応生成物量に依存する。このため、ターゲットパターンに付着する反応生成物量からエッチング中のパターンの形状/寸法を予測することが可能となる。
ここで、本発明の第2の実施の形態に係るドライエッチング装置は、半導体基板に形成されるローカルなパターンを加工の対象(ターゲット)としている。ローカルパターンとは、同一の基板面内で隣り合う2つのパターンの間隔に対して、当該パターンの側壁に入射するフラックスの量が依存関係(相関)を示す位置関係で形成されたパターンをいう。ローカルパターンは、同一の基板面内で隣り合うパターンの間隔が2μm以内に設定されたパターンと定義することができる。フラックスとは、反応性ガスを原料とするラジカルフラックスやイオンフラックスをいう。
これに対して、パターンの立体角は、ドライエッチングのターゲットとなるパターンの構造を示すパラメータであり、次のように定義される。即ち、パターン立体角とは、ある一つのターゲットパターンの基部(下端部)を基準点として、当該基準点からターゲットパターンの側壁に沿う直線と、当該ターゲットパターンに隣り合うパターンの先端(上端)に接する直線とを含む錘体がなす3次元の角度である。パターン立体角は、錘体の頂点(基準点)を中心とする単位球面(半径直径1の球面)を考えたときに、その球面が錘によって切り取られる部分の大きさで規定され、その単位はsr(ステラジアン)で表される。パターン立体角は、パターン密度が高いほど(パターンの配置が密になるほど)小さく、逆にパターン密度が低いほど(パターンの配置が疎になるほど)大きくなる。
シミュレータ42は、第1の光検出部23及び第2の光検出部24のうち、少なくとも第2の光検出部24から出力されるモニタリング信号を用いて、エッチング加工中のパターンの構造(形状/形状)を計算によってシミュレーションするものである。ここでは一例として、第1の光検出部23及び第2の光検出部24の両方から、それぞれモニタリング信号がシミュレータ42に取り込まれるものとする。シミュレータ42には、上記のモニタリング信号の他に、プロセス管理者によって指定(入力操作等)されるプロセスレシピ値の情報が与えられる。また、シミュレータ42では、シミュレーションのためのインプットパラメータとして、上記のプロセスレシピ値の他に、チャンバー内の粒子の物理情報(例えば、フラックス量、密度、温度など)が用いられる。
粒子の物理情報は、第1の光検出部23及び第2の光検出部24から出力される各モニタリング信号に基づく二次元マッピングデータ(光の二次元的な強度分布を示すデータ)から予測される情報であり、例えば以下のようにして導き出される。
まず、光(輝線)の強度を検出するにあたって、モニタリング強度の壁からの寄与とガス中からの寄与は、前者は連続波として、後者は粒子のエネルギー準位に固有の輝線スペクトル(並進運動による線幅を持つ)として分離される。このため、粒子の物理情報の導出に関しては、モニタリングデータ及び局所熱力学平衡(LTE)を仮定して、各原子・分子のエネルギー準位の詳細平衡の式を解くことで得られる。例えば、微細構造遷移が単純な3準位系(3P0、3P1、3P2)の炭素原子C0について以下に示す。この場合、光の強度を表す輝線強度TMBは、ガスの温度Texと光学的厚みτを用いて、次の(4)式のように記述することができる。
上記(4)式において、Iは粒子自体が発する輝線強度であり、νは周波数であり、TBGは(光学的厚みによる減衰とバックグラウンド成分の補正を考慮した)実測輝線強度であり、Tはガス温度であり、hはプランク定数であり、kはボルツマン定数である。また、τ10は粒子のエネルギー準位が3P1−3P0の間で遷移するときの光学的厚みであり、τ21は粒子のエネルギー準位が3P2−3P1の間で遷移するときの光学的厚みである。上記(4)式とモニタリング結果の輝線強度TMBから、光学的厚みτとガスの温度Texを求めることができる。これらの値を、次の(5)式に代入することにより(式中のZは分配関数)、エッチングチャンバー22内での炭素の存在量(柱密度)N(C0)を求めることができる。さらに、求めた炭素の存在量を、モニタリング用の窓から、当該窓に対向するエッチングチャンバーの壁までの距離で割ることにより、チャンバー内での炭素の密度を求めることができる。
その他の粒子の回転・(超)微細構造遷移についても同様に求められる。こうして導き出した粒子の物理情報を、インプットパラメータの一つとしてシミュレータ42に取り込み、その物理情報を反映したシミュレーション結果をプロセス制御部41に与える。これにより、エッチング中にミリ波・サブミリ波の光検出データを反映させたシミュレーションを行ない、そのシミュレーション結果に基づいてリアルタイムにプロセスパラメータを補正することができる。このため、エッチング加工の加工寸法を高精度に制御することができる。また、上記受信機分光計システムを用いて予め取得しておいた光検出データを用いて、オフラインでシミュレーションを行ない、そのシミュレーション結果を基にプロセスパラメータを補正した場合でも、エッチングの加工精度を高めることができる。
(第3の実施の形態)
図6は本発明の第3の実施の形態に係る処理装置となるドライエッチング装置(半導体製造装置)の構成を示す平面図である。図示したドライエッチング装置51では、処理室となるエッチングチャンバー52の外側に光検出部53が配置され、これに対応してエッチングチャンバー52の壁(天井壁)にモニタリング用の窓54が設けられている。エッチングチャンバー52の内部では、被加工物となる半導体基板55が水平に支持されるようになっている。そして、半導体基板55の表面(上面)と対向する状態でエッチングチャンバー52の天井壁に窓54が設けられている。本発明の第3の実施の形態を適用する対象となるドライエッチング装置の種類やエッチングチャンバーの機能に関しては、上記第1の実施の形態の場合と同様である。
図6は本発明の第3の実施の形態に係る処理装置となるドライエッチング装置(半導体製造装置)の構成を示す平面図である。図示したドライエッチング装置51では、処理室となるエッチングチャンバー52の外側に光検出部53が配置され、これに対応してエッチングチャンバー52の壁(天井壁)にモニタリング用の窓54が設けられている。エッチングチャンバー52の内部では、被加工物となる半導体基板55が水平に支持されるようになっている。そして、半導体基板55の表面(上面)と対向する状態でエッチングチャンバー52の天井壁に窓54が設けられている。本発明の第3の実施の形態を適用する対象となるドライエッチング装置の種類やエッチングチャンバーの機能に関しては、上記第1の実施の形態の場合と同様である。
光検出部53は、エッチングチャンバー52内で半導体基板55の基板表面を対象に、ミリ波・サブミリ波帯域の光を検出するものである。光検出部53は、ステージ56と、2つのミラー57,58と、受信機59と、分光計60とを用いて構成されている。ステージ56は、半導体基板55の基板表面と同一面内で、光の検出対象となる位置を、基板の中心部から端部にかけて変位(スイープ)するように、移動可能に設けられている。その場合は、ステージ56の移動範囲に合わせて窓54を大きく確保する必要がある。また、エッチングチャンバー52の天井壁に複数の窓を設けて、各々の窓を通して光を定点観測してもよい。ステージ移動のバリエーションに関しては、上記第1の実施の形態と同様である。ステージ56には、上述した2つのミラー57,58と、受信機59と、分光計60とが搭載されている。
ミラー57,58は、それぞれ凹面状の反射面を有するものである。一方のミラー57は、エッチングチャンバー2内(基板表面)で発生し、かつ窓54を通してチャンバー外に漏れる光を全反射する光学素子となる。他方のミラー58は、ミラー57によって反射された光を全反射する光学素子となる。受信機59は、ミラー58で反射された光の波長帯のうち、ミリ波・サブミリ波帯域の光の波を高感度に受信するものである。受信機59としては、例えば、超伝導トンネル接合素子SISミキサー受信機を好適に用いることができる。分光計60は、受信機59で受信したミリ波・サブミリ波帯域の光を分光するものである。分光計60としては、例えば、音響光学型分光計やデジタル分光計などを好適に用いることができる。
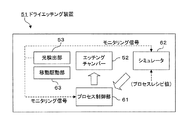
図7は本発明の第3の実施の形態に係るドライエッチング装置の概念図である。ドライエッチング装置51は、大きくは、前述したエッチングチャンバー52と光検出部53の他に、プロセス制御部61と、シミュレータ62と、移動駆動部63とを備えた構成となっている。このうち、移動駆動部63は、ステージ56を移動させるための駆動部である。プロセス制御部61とシミュレータ62に関しては、パターン形状のシミュレーションに用いるインプットパラメータが異なるだけで、基本的な構成は上記第2の実施の形態と共通である。
まず、ミリ波・サブミリ波の帯域では、連続波の強度Iνは輻射輸送を解くことにより、次の(6)式のように記述することができる。
上記(6)式において、KBはボルツマン定数、Tは温度、νは周波数、cは光速、τは光学的厚み、ρは密度、kνは吸収係数、dsは厚さ素片である。ここで、実際のエッチング中とエッチング前では光学的厚みτの変化よりも温度Tの変化が大きいとすると、ミリ波・サブミリ波帯域の光の連続波強度Iνは、温度Tに比例することになる。このため、連続波強度Iνは、温度Tのトレーサーとして用いることができる。よって、ミリ波・サブミリ波帯域の光の連続波強度を検出することにより、エッチング中での基板表面の温度とその分布を把握することができる。
具体的には、例えば、ドライエッチング前の基板表面の温度と、ミリ波・サブミリ波帯域の光強度の関係を基準データとして、例えばシミュレータ62が備えるデータベースに登録しておく。そして、エッチング中においては、光検出部53を用いて検出した半導体基板55の基板表面の光強度に対応する基板表面温度の値を、データベース内の基準データを用いて抽出又は計算することにより、基板表面温度の絶対値を予測する。基板表面温度の予測は、シミュレータ62で行なってもよいし、シミュレータ62とは独立した図示しない信号処理部で行なってもよい。基板表面温度は、加工形状制御にとって重要なパラメータの一つとなる。なぜなら、基板表面温度は、エッチング表面反応におけるガスの吸着確率に大きな影響を与えるためである。
このため、本発明の第3の実施の形態に係るドライエッチング装置51では、エッチング中に予測した基板表面温度に関する予測情報を、シミュレータ62でのパターン形状のシミュレーションに用いるインプットパラメータの一つに適用する。これにより、半導体基板55の表面温度に関する予測情報を、プロセス制御に反映させることができる。また、基板表面温度に関する予測情報を反映させたシミュレーション結果に基づいて、リアルタイムにプロセスパラメータを補正することができる。したがって、エッチングにおけるパターン加工の形状及び寸法の制御を高精度に行なうことができる。
また、光検出部53のステージ56を移動駆動部63により移動させることにより、基板表面温度の二次元マッピングデータを取得することができる。そして、この二次元マッピングデータを、シミュレーションのインプットパラメータに用いることで、半導体基板55の表面温度分布を、シミュレータ62のシミュレーション結果に反映させることができる。その結果、プロセス制御のさらなる精度向上を図ることができる。
ちなみに、エッチング中での基板表面温度を直接測定する方法としては、半導体基板上に温度センサチップをつける方法があるが、基板1枚当たりの価格が高価になり、実際の生産ラインへの適用は価格の面から現実的ではない。また、従来では半導体基板を保持するチャック部分の温度制御を行なっているに過ぎず、粒子に曝される半導体基板の加工表面の温度を直接モニタリングしているわけではない。
なお、光検出部53を用いた半導体基板の表面温度の計測は、ドライエッチングプロセスに限らず、他のプロセスにも適用可能である。ただし、半導体基板の処理に液体を用いるプロセスの場合には、水の吸収を大きく受けるサブミリ波よりも、ミリ波(〜300GHz以下の周波数)帯域の光を検出することが好ましい。
(第4の実施の形態)
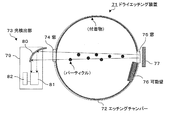
図8は本発明の第4の実施の形態に係る処理装置となるドライエッチング装置(半導体製造装置)の構成を示す平面図である。図示したドライエッチング装置71では、処理室となるエッチングチャンバー72の外側に光検出部73が配置され、これに対応してエッチングチャンバー72の壁(側壁)に2つの窓74,75が設けられている。エッチングチャンバー72の内部では、被加工物となる半導体基板(不図示)が水平に支持されるようになっている。本発明の第4の実施の形態を適用する対象となるドライエッチング装置の種類やエッチングチャンバーの機能に関しては、上記第1の実施の形態の場合と同様である。
図8は本発明の第4の実施の形態に係る処理装置となるドライエッチング装置(半導体製造装置)の構成を示す平面図である。図示したドライエッチング装置71では、処理室となるエッチングチャンバー72の外側に光検出部73が配置され、これに対応してエッチングチャンバー72の壁(側壁)に2つの窓74,75が設けられている。エッチングチャンバー72の内部では、被加工物となる半導体基板(不図示)が水平に支持されるようになっている。本発明の第4の実施の形態を適用する対象となるドライエッチング装置の種類やエッチングチャンバーの機能に関しては、上記第1の実施の形態の場合と同様である。
上記2つの窓74,75は、エッチングチャンバー72の中心軸を間に挟んで、互いに対向する状態で同一直線上に設けられている。一方の窓74は、光検出のモニタリング用として設けられたものである。他方の窓75は、エッチングチャンバー72の内部に設けられた可動壁76によって開閉されるようになっている。可動壁76は、窓75よりも大きい部材である。可動壁76の壁面は、エッチングチャンバー72の壁面と同じ材料で形成することが望ましい。可動壁76は、窓75に近接して対向する遮蔽位置(窓74を通してチャンバー内を覗いたときに窓75が完全に覆い隠される位置)と、窓75からずれた退避位置(窓74を通してチャンバー内を覗いたときに窓75が完全に露出する位置)との間で、移動する。可動壁76を遮蔽位置に移動させた状態では、窓75が可動壁76によって遮蔽された状態となる。また、可動壁76を退避位置に移動させた状態では、窓75が開放された状態となる。
エッチングチャンバー72の外側には、光検出部73の他に電波吸収体77が設けられている。電波吸収体77は、窓75に近接して対向する状態で配置されている。電波吸収体77は、窓75背後からの電波ノイズ成分をカットするために設け、超伝導受信機のSIS素子部分と同様の温度4Kに冷却されている。
光検出部73は、ミリ波・サブミリ波帯域の光(輝線)を検出するものである。光検出部73は、ステージ79と、ミラー80と、受信機81と、分光計82とを用いて構成されている。ステージ79は、例えばエッチングチャンバー2の中心を回転中心として、円周方向に回転移動可能に設けられている。
ただし、ステージ79は固定されていてもよい。その場合は、エッチングチャンバー72の高さ方向の窓74,75の位置に合わせてステージ79を固定する。窓74,75の位置は、例えば、エッチングチャンバー72内に浮遊するパーティクルの量を光検出によって推定する場合は、チャンバー内に水平に支持される半導体基板の表面(上面)から数mm〜数cmの高さに設定することが好ましい。なぜなら、シース付近でパーティクルが浮遊していることが、例えば、Selwyn, G.S., Vac Sci.Technol. B9,3487(1991)などに示されているからである。
ミラー80は、凹面状の反射面を有するものである。ミラー80は、エッチングチャンバー72内で発生し、かつ窓74を通してチャンバー外に漏れる光を全反射する光学素子となる。受信機81は、ミラー80で反射された光の波長帯のうち、ミリ波・サブミリ波帯域の光の波を高感度に受信するものである。受信機81としては、例えば、超伝導トンネル接合素子SISミキサー受信機を好適に用いることができる。分光計82は、受信機81で受信したミリ波・サブミリ波帯域の光を分光するものである。分光計82としては、例えば、音響光学型分光計やデジタル分光計などを好適に用いることができる。
図9は本発明の第4の実施の形態に係るドライエッチング装置の概念図である。ドライエッチング装置71は、大きくは、前述したエッチングチャンバー72と光検出部73の他に、プロセス制御部83と、移動駆動部84とを備えた構成となっている。
プロセス制御部83は、エッチングチャンバー72に対して、当該エッチングチャンバー72に各種の動作信号を送信することにより、エッチングチャンバー72によって行なわれるプロセス(本形態例ではドライエッチングプロセス)を制御するものである。移動駆動部84は、ステージ79を移動させるための駆動部である。ステージ79を固定する場合は、移動駆動部84が不要になる。
上記構成からなるドライエッチング装置71においては、エッチング中に発生する反応生成物やパーティクルなどが、例えば温度〜300−400Kまで上昇するエッチングチャンバー72の内壁に固体となって付着する。このため、定期的にチャンバークリーニングを行なう必要がある。そこで、本発明の第4の実施の形態に係るドライエッチング装置71では、エッチングチャンバー72をクリーニングする場合に、光検出部83を用いてミリ波・サブミリ波帯域の光を検出し、その検出結果を基にクリーニングの終点検出を行なう。以下に、具体的な制御の方法について説明する。
まず、固体の熱輻射(サブミリ波の連続波)は、光学的厚みτが薄い(τ<1)場合には、上記(6)式のように記述することができる。この場合、ρは付着物の密度、kνは吸収係数、dsは付着物の厚さ素片となる。よって、光学的厚みτは付着物量(厚さ)に比例する。つまり、温度変化が一定であるとすると、サブミリ波の連続波強度はτ、即ち、付着物量に比例するものとなる。ここで記述する「付着物」とは、可動壁76を含めて、エッチングチャンバー72の内壁に付着する物(エッチングの反応生成物やパーティクルなど)をいう。
そこで、実際のクリーニングプロセスでは、図8に示すように可動壁76を遮蔽位置に移動した第1の状態と、図10に示すように可動壁76を退避位置に移動した第2の状態で、それぞれ光検出部83を用いて、ミリ波・サブミリ波帯域の光の強度(連続波強度)を検出する。この場合、窓75の外側は常に電波吸収体77によって覆われた状態となる。また、第2の状態では、2つの窓74,75を結ぶ空間で光検出部83により連続波強度が検出される。このため、第2の状態で検出される連続波強度の値は、チャンバー内に浮遊するパーティクルの量に対応したものとなる。即ち、パーティクル量が相対的に多い場合は、第2の状態で得られる連続波強度の値が相対的に大きくなり、パーティクル量が相対的に少ない場合は、第2の状態で得られる連続波強度の値が相対的に小さくなる。したがって、チャンバー内に浮遊するパーティクルの量を推定することができる。また、第1の状態で検出される連続波強度と第2の状態で検出される連続波強度の差分をΔIνとすると、この差分ΔIνは、可動壁76の表面(内側の面)の付着物量に対応するものとなる。即ち、可動壁76の付着物量が相対的に多い場合は、差分ΔIνの値が相対的に大きくなり、可動壁76の付着物量が相対的に少ない場合は、差分ΔIνの値が相対的に小さくなる。したがって、チャンバー内壁に付着する付着物の量を推定することができる。こうして推定されるパーティクル量及び付着物量は、チャンバー内の清浄度を示すものとなる。即ち、パーティクル量及び付着物量が相対的に多い場合は、チャンバー内の清浄度が相対的に低いものとなり、パーティクル量及び付着物量が相対的に少ない場合は、チャンバー内の清浄度が相対的に高いものとなる。このようにして得られる清浄度の情報は、チャンバークリーニングの終点検出に利用することができる。
例えば、付着物に関しては、クリーニング中に上記動作によって求めた差分ΔIνの値と、予め設定された許容値とを比較し、この比較結果に基づいてクリーニングの終点検出を行なう。具体的には差分ΔIνの値が許容値以下となった段階で、付着物に関するクリーニングが終了したと判断する。また、パーティクルに関しては、メンテナンスによりチャンバーに浮遊するパーティクルを取り除いた状態下で、可動壁76を退避位置に移動させて光検出部73で検出した連続波強度の値を、ドライエッチング装置71内のメモリ等に基準値として登録しておく。そして、クリーニング中に第2の状態で光検出部83が検出した連続波強度の値と、予めメモリ等に登録してある基準値とを比較し、この比較結果に基づいてクリーニングの終点検出を行なう。具体的には、第2の状態で検出した連続波強度の値が基準値以下となった段階で、浮遊パーティクルに関するクリーニングが終了したと判断する。
その結果、エッチングチャンバー72のクリーニングの終点検出を正確に行なうことができる。したがって、クリーニング時間の最適化を図ることができる。また、光検出時の状態(第1の状態、第2の状態)を可動壁76の移動によって切り替えることにより、チャンバー内壁面に付着している付着物の量と、チャンバー内に浮遊しているパーティクルの量を分離して推定することができる。ただし、チャンバー内の清浄度を推定するにあたっては、必ずしも付着物量とパーティクル量を分離して推定する必要はない。このため、ドライエッチング装置71の構成としては、窓75、可動壁76及び電波吸収体77を除いた構成としてもよい。
ちなみに、既存の可視光モニタリングの仕組みでは、低エネルギー粒子やパーティクルの存在を捉えることはできない。このため、チャンバークリーニングの終点検出を正確に行なうことはできない。
なお、本発明の第4の実施の形態においては、エッチングチャンバーのクリーニングプロセスへの適用を例示したが、これに限らず、加工プロセス中でも、In-Situで適用することが可能である。また、加工プロセス中に適用すれば、付着物量やパーティクル量の推定値から、例えば、クリーニングなどのメンテナンス時期の最適化を図ることができる。
(第5の実施の形態)
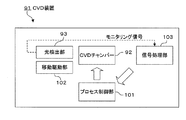
図11は本発明の第5の実施の形態に係る処理装置として、半導体製造装置の一つであるCVD(Chemical Vapor Deposition)装置の構成を示す平面図である。図示したCVD装置91においては、処理室となるCVDチャンバー92の外側に、ミリ波・サブミリ波の光(輝線)を検出する光検出部93が配置され、これに対してCVDチャンバー92の壁(天井壁)にモニタリング用の窓94が設けられている。CVDチャンバー92の内部では、被加工物となる半導体基板95が水平に支持されるようになっている。そして、半導体基板95の表面(上面)と対向する状態でCVDチャンバー92の天井壁に窓94が設けられている。
図11は本発明の第5の実施の形態に係る処理装置として、半導体製造装置の一つであるCVD(Chemical Vapor Deposition)装置の構成を示す平面図である。図示したCVD装置91においては、処理室となるCVDチャンバー92の外側に、ミリ波・サブミリ波の光(輝線)を検出する光検出部93が配置され、これに対してCVDチャンバー92の壁(天井壁)にモニタリング用の窓94が設けられている。CVDチャンバー92の内部では、被加工物となる半導体基板95が水平に支持されるようになっている。そして、半導体基板95の表面(上面)と対向する状態でCVDチャンバー92の天井壁に窓94が設けられている。
CVDチャンバー92は、半導体基板95の表面(上面)に、反応ガスの供給や気相での化学反応により膜を堆積させて、所望の薄膜を形成する場合に用いられるものである。本発明の第5の実施の形態を適用する対象となるCVD装置としては、例えば、常圧CVDや減圧CVDなどが挙げられる。
光検出部93は、CVDチャンバー92内で半導体基板95の基板表面を対象に、ミリ波・サブミリ波帯域の光を検出するものである。光検出部93は、ステージ96と、2つのミラー97,98と、受信機99と、分光計100とを用いて構成されている。ステージ96は、半導体基板95の基板表面と同一面内で、光の検出対象となる位置を、基板の中心から端部にかけて変位(スイープ)するように、移動可能に設けられている。その場合は、ステージ96の移動範囲に合わせて窓94を大きく確保する必要がある。また、CVDチャンバー92の天井壁に複数の窓を設けて、各々の窓を通して光を定点観測してもよい。ステージ移動のバリエーションに関しては、上記第1の実施の形態と同様である。ステージ96には、上述した2つのミラー97,98と、受信機99と、分光計100とが搭載されている。
ミラー97,98は、それぞれ凹面状の反射面を有するものである。一方のミラー97は、CVDチャンバー92内(基板表面)で発生し、かつ窓94を通してチャンバー外に漏れる光を全反射する光学素子となる。他方のミラー98は、ミラー97によって反射された光を全反射する光学素子となる。受信機99は、ミラー98で反射された光の波長帯のうち、ミリ波・サブミリ波帯域の光の波を高感度に受信するものである。受信機99としては、例えば、超伝導トンネル接合素子SISミキサー受信機を好適に用いることができる。分光計100は、受信機99で受信したミリ波・サブミリ波帯域の光を分光するものである。分光計100としては、例えば、音響光学型分光計やデジタル分光計などを好適に用いることができる。
図12は本発明の第5の実施の形態に係るCVD装置の概念図である。CVD装置91は、大きくは、前述したCVDチャンバー92と光検出部93の他に、プロセス制御部101と、移動駆動部102と、信号処理部103とを備えた構成となっている。プロセス制御部101は、CVDチャンバー92に対して、当該CVDチャンバー92に各種の動作信号を送信することにより、CVDチャンバー92によって行なわれるプロセスを制御するものである。移動駆動部102は、ステージ96を移動させるための駆動部である。信号処理部103は、光検出部93から出力されるモニタリング信号を解析することにより、半導体基板95の表面に堆積する膜の厚みを予測するものである。
上記構成からなるCVD装置91においては、CVDのプロセス中に光検出部93を用いて、ミリ波・サブミリ波帯域の光の連続波強度を検出する。この場合、検出される連続波強度Iνは、上記(6)式で示したように、温度Tと光学的厚みτの関数として表される。プラズマやバイアスを使用しないCVDプロセスの場合は、半導体基板95の表面温度の変化よりも光学的厚みτの変化の方が大きくなる。よって、CVDプロセス中に連続波強度の変化を検出することにより、半導体基板95の表面に堆積する膜の厚さを推定し、当該堆積膜厚が所望の厚さとなるようにCVDプロセスを制御することができる。
具体的には、CVDプロセスを開始する直前の連続波強度を、光検出部93を用いて検出し、その値を基準値としてCVD装置91のメモリに記憶しておく。メモリは、例えば信号処理部103が備えるものとする。そして、信号処理部103では、CVDプロセス中に光検出部93を用いて検出した連続波強度の値と、プロセス開始直前にメモリに記憶した基準値との差分に基づいて、堆積膜厚を推定する。その場合、連続波強度のデータは随時、信号処理部103に送られ、そこで堆積膜厚の推定(予測)を行なう。信号処理部103で推定した堆積膜厚の情報は、成膜処理(本形態例ではCVDプロセス)の終点検出のためにプロセス制御部101に送られる。プロセス制御部101は、信号処理部103から送られた膜厚情報を用いて、堆積膜厚が所望の膜厚となったかどうかを判断する。そして、堆積膜厚が所望の膜厚となった段階でCVDプロセスを停止するように、プロセスステップ制御を行なう。
これにより、CVDプロセスにおける膜厚を高精度に制御することが可能となる。また、半導体基板95の基板表面と同一面内で、光の検出対象となる位置を、基板の中心部から端部にかけて変位(スイープ)するように、ステージ96を移動させることにより、膜厚の面内均一性の確認をもIn-Siteで行なうことができる。なお、ここでは成膜処理の一例として、CVDプロセスへの適用を例示したが、これに限らず、他の成膜処理に適用してもよい。
本発明に係る処理装置は、半導体装置の製造に用いられる半導体製造装置に限らず、処理室の内部にミリ波・サブミリ波帯域の光(原子や分子のエネルギー励起による輝線)が発生する装置であれば、どのような処理装置にも適用可能である。
1,21,51,71…ドライエッチング装置、2,22,52,72…エッチングチャンバー、3,53,73,93…光検出部、4,25,26,54,74,75,94…窓、10,41,61,83、101…プロセス制御部、23…第1の光検出部、24…第2の光検出部、42,62…シミュレータ,55,95…半導体基板、76…可動壁、91…CVD装置、92…CVDチャンバー、103…信号処理部
Claims (13)
- 被加工物を処理する処理室と、
前記処理室の壁に設けられた窓を通して、ミリ波及びサブミリ波のうちの少なくとも一方の光を検出する光検出手段と
を備える処理装置。 - 前記処理室の外側に前記光検出手段を移動可能に設けてなる
請求項1記載の処理装置。 - 前記光検出手段の検出結果を用いて、前記処理の終点を検出する手段を備える
請求項1又は2記載の処理装置。 - 前記被加工物の形状/寸法をシミュレーションによって予測するとともに、前記光検出手段の検出結果に基づいて前記処理室内の粒子の物理情報を導き出し、当該物理情報を前記シミュレーションのためのインプットパラメータに用いるシミュレータを備える
請求項1又は2記載の処理装置。 - 前記光検出手段は、可視線帯域の光を検出する手段及び赤外線帯域の光の検出する手段を有する第1の光検出部と、サブミリ波帯域の光を検出する手段及びミリ波帯域の光を検出する手段を有する第2の光検出部とを備える
請求項1又は2記載の処理装置。 - 前記光検出手段の検出結果を用いて、前記被加工物の表面温度を予測する手段を備える
請求項1又は2記載の処理装置。 - 前記被加工物の形状/寸法をシミュレーションによって予測するとともに、前記被加工物の表面温度に関する予測情報を前記シミュレーションのためのインプットパラメータに用いるシミュレータを備える
請求項6記載の処理装置。 - 前記光検出手段の検出結果を用いて、前記処理室内の清浄度を推定する手段を備える
請求項1又は2記載の処理装置。 - 前記処理室の内部をクリーニングする場合に、前記推定した清浄度に基づいて、前記クリーニングの終点を検出する
請求項8記載の処理装置。 - 前記処理室内の清浄度として、前記処理室の内壁面に付着している付着物の量と前記処理室に浮遊しているパーティクルの量を推定する
請求項8記載の処理装置。 - 前記処理室の壁に互いに対向する状態で2つの窓を設け、
前記光検出手段は、一方の窓を通して光を検出し、
前記処理室の内部に、他方の窓を遮蔽/開放する可動壁を設けた
請求項10記載の処理装置。 - 前記光検出手段の検出結果に基づいて、前記被加工物の表面に堆積する膜の厚さを予測する手段を備える
請求項1又は2記載の処理装置。 - 前記予測した堆積膜厚に基づいて、成膜処理の終点を検出する
請求項12記載の処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008185878A JP2010027770A (ja) | 2008-07-17 | 2008-07-17 | 処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008185878A JP2010027770A (ja) | 2008-07-17 | 2008-07-17 | 処理装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010027770A true JP2010027770A (ja) | 2010-02-04 |
Family
ID=41733330
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008185878A Pending JP2010027770A (ja) | 2008-07-17 | 2008-07-17 | 処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010027770A (ja) |
-
2008
- 2008-07-17 JP JP2008185878A patent/JP2010027770A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI504867B (zh) | 電漿處理中之空間分辨電漿發射光譜 | |
| JP4288307B2 (ja) | プラズマ電子温度の測定方法および装置 | |
| TWI754015B (zh) | 電漿光學發射光譜系統、電腦斷層系統及促進電漿之電腦斷層重建的方法 | |
| Krychowiak et al. | Overview of diagnostic performance and results for the first operation phase in Wendelstein 7-X | |
| Nagao et al. | X-ray thin film measurement techniques VII. Pole figure measurement | |
| TWI854748B (zh) | 用於測量溫度的方法及設備 | |
| JP2009534854A (ja) | 基板処理をモニタリングするためのニューラルネットワーク方法及び装置 | |
| KR20170101218A (ko) | 박막 재료의 품질 검사 | |
| CN110931399A (zh) | 一种多种检测功能的rie半导体材料刻蚀装置 | |
| US20170314991A1 (en) | Spatially resolved optical emission spectroscopy (oes) in plasma processing | |
| Fulvio et al. | A straightforward method for Vacuum-Ultraviolet flux measurements: The case of the hydrogen discharge lamp and implications for solid-phase actinometry | |
| JP6685996B2 (ja) | 電子顕微鏡のためのターゲットサンプルの質量厚みを測定する方法 | |
| JP4554429B2 (ja) | プラズマ発光測定システム | |
| JP2010027770A (ja) | 処理装置 | |
| US10316405B2 (en) | Deposition of integrated computational elements (ICE) using a translation stage | |
| KR102600883B1 (ko) | 플라즈마 프로세싱에서의 공간적으로 분해된 광학적 방출 스펙트로스코피(oes) | |
| Oh et al. | Spatially resolvable optical emission spectrometer for analyzing density uniformity of semiconductor process plasma | |
| US20130309785A1 (en) | Rotational absorption spectra for semiconductor manufacturing process monitoring and control | |
| US20210116390A1 (en) | Extended infrared spectroscopic wafer characterization metrology | |
| Yoo et al. | Fabrication of High-purity Rb Vapor Cell for Electric Field Sensing | |
| López-Flores et al. | Optimized end station and operating protocols for reflection extended x-ray absorption fine structure (ReflEXAFS) investigations of surface structure at the European Synchrotron Radiation Facility beamline BM29 | |
| Kupreenko et al. | Determination of thickness of ultrathin surface films in nanostructures from the energy spectra of reflected electrons | |
| Lin et al. | Latest Scientific Results of China's Lunar Exploration Program | |
| TWI793128B (zh) | 用於偵測製造製程缺陷之方法、電腦程式產品及系統 | |
| Snigirev et al. | Measurement of polarizabilities of 5 D levels of rubidium in a magnetic trap |