JP2010022829A - ダイナミックに適合可能な画像形成システムの位置を調整する方法およびx線システム - Google Patents
ダイナミックに適合可能な画像形成システムの位置を調整する方法およびx線システム Download PDFInfo
- Publication number
- JP2010022829A JP2010022829A JP2009166594A JP2009166594A JP2010022829A JP 2010022829 A JP2010022829 A JP 2010022829A JP 2009166594 A JP2009166594 A JP 2009166594A JP 2009166594 A JP2009166594 A JP 2009166594A JP 2010022829 A JP2010022829 A JP 2010022829A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- time
- interest
- ray
- data set
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/504—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for diagnosis of blood vessels, e.g. by angiography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
- A61B6/4435—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure
- A61B6/4441—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure the rigid structure being a C-arm or U-arm
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Engineering & Computer Science (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Surgery (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- High Energy & Nuclear Physics (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Animal Behavior & Ethology (AREA)
- Vascular Medicine (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Abstract
【解決手段】a)運動する対象物について形成された、少なくとも3次元の少なくとも1つの時間分解能データセットが用いられ、b)該時間分解能データセットの時間ステップごとに前記画像形成システムの位置が計算され、該計算された位置から運動する対象物の関心領域となる構造に対して少なくとも1つの最適な観察点が形成され、c)ステップbで計算された位置がリアルタイムで自動調整され、関心領域となる構造に対する少なくとも1つの最適な観察点がつねに表示可能となる。
【選択図】図1
Description
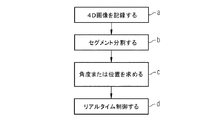
・画像を形成するステップ(ステップa):時間分解能3Dデータセットすなわちいわゆる4Dデータセットを撮影する。第4次元は有利には心相または呼吸相などの時間パラメータである。
・構造をセグメント分割するステップ(ステップb):当該のステップは付加的なステップである。撮影された4Dデータから関心領域となる構造をセグメント分割する。この場合の構造は最適なCアームの角度ないし位置の選択に関連する構造である。心弁膜の処置のケースでは、当該の構造は大動脈弁環である。関心領域となる構造はボリュームデータの個々の時間ステップごとにセグメント分割され、結果として当該の構造の4Dモデルが形成される。
・最適なCアームの角度ないし位置を求めるステップ(ステップc):関心領域となる構造の4Dモデルから最適なCアームの角度ないし位置が計算される。このとき、場合によっては、当該の角度ないし位置から介入ステップの制御にとって最適な観察点を形成できるよう、診療的問題に応じたアルゴリズムが用いられる。心弁膜の処置のケースでは、例えば、挿入される人工蓋の位置を定めるために、大動脈弁環に対して垂直な観察点が求められると有利である。ここでの計算は4Dモデルの時間ステップごとに個別に行われ、結果として角度方向のセットおよび/またはCアームの位置のセットが得られる。
・Cアームをリアルタイム制御するステップ(ステップd):最後のステップでは計算された角度方向のセットまたはCアームの位置のセットが用いられ、その時点の状態に適合する角度ないし位置が選択される。Cアームはリアルタイム制御により選択された角度ないし位置へ移動され、運動する構造の画像がリアルタイムで最適に形成される。
Claims (7)
- 運動する対象物に対する少なくとも1つの最適な観察点を形成するために、ダイナミックに適合可能な画像形成システムの位置を調整する方法において、
a)前記運動する対象物について形成された、少なくとも3次元の少なくとも1つの時間分解能データセットを用いるステップ、
b)前記時間分解能データセットの時間ステップごとに前記画像形成システムの位置を計算し、該計算された位置から前記運動する対象物の関心領域となる構造に対する少なくとも1つの最適な観察点を形成するステップ、
c)前記ステップbで計算された位置をリアルタイムで自動調整し、前記関心領域となる構造に対する少なくとも1つの最適な観察点をつねに表示可能にするステップ
を有する
ことを特徴とするダイナミックに適合可能な画像形成システムの位置を調整する方法。 - 前記ステップbの前に、前記運動する対象物の前記関心領域となる構造を、前記時間分解能データセットの時間ステップごとにセグメント分割する、請求項1記載のダイナミックに適合可能な画像形成システムの位置を調整する方法。
- 前記画像形成システムとしてCアームを備えたX線システムを用い、前記ステップcで前記Cアームの位置および/または角度をリアルタイムで調整する、請求項1または2記載のダイナミックに適合可能な画像形成システムの位置を調整する方法。
- 前記X線システムはロボット制御方式のCアームを有する、請求項3記載のダイナミックに適合可能な画像形成システムの位置を調整する方法。
- 前記時間分解能データセットの前記時間ステップは前記運動する対象物の運動の相を含む、請求項1から4までのいずれか1項記載のダイナミックに適合可能な画像形成システムの位置を調整する方法。
- 請求項1から5までのいずれか1項記載のダイナミックに適合可能な画像形成システムの位置を調整する方法の実行に適したCアーム(2)を備えた
X線システム(1)において、
時間分解能データセットの時間ステップごとに前記Cアームの位置を計算し、該計算された位置から関心領域となる構造に対する少なくとも1つの最適な観察点を形成する手段(7)と、
前記計算された位置をリアルタイムで自動調整し、前記関心領域となる構造に対する少なくとも1つの最適な観察点をつねに表示可能にする手段と
を有する
ことを特徴とするX線システム。 - 当該のX線システムはロボット制御方式のCアームを有する、請求項6記載のX線システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102008033137A DE102008033137A1 (de) | 2008-07-15 | 2008-07-15 | Verfahren und Vorrichtung zur Einstellung einer dynamisch anpassbaren Position eines bildgebenden Systems |
| DE102008033137.6 | 2008-07-15 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010022829A true JP2010022829A (ja) | 2010-02-04 |
| JP2010022829A5 JP2010022829A5 (ja) | 2012-07-26 |
| JP5661258B2 JP5661258B2 (ja) | 2015-01-28 |
Family
ID=41461297
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009166594A Active JP5661258B2 (ja) | 2008-07-15 | 2009-07-15 | ダイナミックに適合可能な画像形成システムの位置を調整する方法およびx線システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8023616B2 (ja) |
| JP (1) | JP5661258B2 (ja) |
| DE (1) | DE102008033137A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013233413A (ja) * | 2012-04-09 | 2013-11-21 | Toshiba Corp | X線診断装置 |
| JP2014079441A (ja) * | 2012-10-17 | 2014-05-08 | Toshiba Corp | X線撮影条件設定システム、画像診断装置及びx線撮影条件設定プログラム |
| JP2014083357A (ja) * | 2012-10-26 | 2014-05-12 | Toshiba Corp | 医用画像処理装置、x線診断装置及び医用画像処理プログラム |
| JP2018114361A (ja) * | 2012-04-09 | 2018-07-26 | キヤノンメディカルシステムズ株式会社 | X線診断装置 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010039304A1 (de) * | 2010-08-13 | 2012-02-16 | Siemens Aktiengesellschaft | Befestigungsvorrichtung für eine Mitralklappe und Verfahren |
| DE102011006484A1 (de) * | 2011-03-31 | 2012-10-04 | Siemens Aktiengesellschaft | Angiographiesystem zur angiographischen Untersuchung eines Untersuchungsobjekts und angiographisches Untersuchungsverfahren |
| JP6169832B2 (ja) * | 2011-11-29 | 2017-07-26 | 東芝メディカルシステムズ株式会社 | X線撮影装置 |
| DE102012205935B4 (de) * | 2012-04-12 | 2018-11-15 | Siemens Healthcare Gmbh | Verfahren zur Aufnahme eines vierdimensionalen Angiographie-Datensatzes |
| US10888297B2 (en) * | 2012-12-05 | 2021-01-12 | Michael B. McDonald | Above-the-valve TAVR ventricular catheter |
| JP2016502445A (ja) * | 2012-12-05 | 2016-01-28 | マクドナルド,ミカエル,ビー. | Tavr心室カテーテル |
| US10582904B2 (en) * | 2015-06-17 | 2020-03-10 | Koninklijke Philips N.V. | Determining C-arm angulation for valve positioning |
| US10796463B2 (en) | 2015-08-05 | 2020-10-06 | General Electric Company | Tomographic imaging for time-sensitive applications |
| CN115553797A (zh) * | 2022-09-27 | 2023-01-03 | 上海联影医疗科技股份有限公司 | 扫描轨迹的调整方法、系统、设备及存储介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6019A (en) * | 1849-01-09 | Cast-iron car-wheel | ||
| JPH0413381A (ja) * | 1990-04-30 | 1992-01-17 | Shimadzu Corp | デジタルアンギオ装置 |
| JP2002336222A (ja) * | 2001-03-06 | 2002-11-26 | Toshiba Corp | X線診断装置及び画像処理装置 |
| JP2008000190A (ja) * | 2006-06-20 | 2008-01-10 | Toshiba Corp | X線診断装置およびx線診断装置におけるデータ処理方法 |
| JP2008000601A (ja) * | 2006-06-20 | 2008-01-10 | Siemens Ag | 特にx線画像データを記録するためのロボット制御式の記録装置、ならびにこれに対応する方法 |
| JP2008100074A (ja) * | 2006-10-20 | 2008-05-01 | Siemens Ag | 対象の検出装置および対象の検出方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10210646A1 (de) | 2002-03-11 | 2003-10-09 | Siemens Ag | Verfahren zur Bilddarstellung eines in einen Untersuchungsbereich eines Patienten eingebrachten medizinischen Instruments |
| DE102004048209B3 (de) | 2004-09-30 | 2005-09-01 | Siemens Ag | Verfahren und Vorrichtung zur Erzeugung eines dreidimensionalen Bilddatensatzes eines bewegten Objekts mittels Röntgentomographie |
| US7239684B2 (en) * | 2005-02-28 | 2007-07-03 | Mitsubishi Heavy Industries, Ltd. | Radiotherapy apparatus monitoring therapeutic field in real-time during treatment |
| DE102005032523B4 (de) * | 2005-07-12 | 2009-11-05 | Siemens Ag | Verfahren zur prä-interventionellen Planung einer 2D-Durchleuchtungsprojektion |
| DE102005049106A1 (de) * | 2005-10-13 | 2007-04-19 | Siemens Ag | Medizinisches Bildgebungssystem und Kollisionsschutzverfahren mit regelbarem Arm |
-
2008
- 2008-07-15 DE DE102008033137A patent/DE102008033137A1/de not_active Ceased
-
2009
- 2009-07-13 US US12/501,539 patent/US8023616B2/en active Active
- 2009-07-15 JP JP2009166594A patent/JP5661258B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6019A (en) * | 1849-01-09 | Cast-iron car-wheel | ||
| JPH0413381A (ja) * | 1990-04-30 | 1992-01-17 | Shimadzu Corp | デジタルアンギオ装置 |
| JP2002336222A (ja) * | 2001-03-06 | 2002-11-26 | Toshiba Corp | X線診断装置及び画像処理装置 |
| JP2008000190A (ja) * | 2006-06-20 | 2008-01-10 | Toshiba Corp | X線診断装置およびx線診断装置におけるデータ処理方法 |
| JP2008000601A (ja) * | 2006-06-20 | 2008-01-10 | Siemens Ag | 特にx線画像データを記録するためのロボット制御式の記録装置、ならびにこれに対応する方法 |
| JP2008100074A (ja) * | 2006-10-20 | 2008-05-01 | Siemens Ag | 対象の検出装置および対象の検出方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013233413A (ja) * | 2012-04-09 | 2013-11-21 | Toshiba Corp | X線診断装置 |
| JP2018114361A (ja) * | 2012-04-09 | 2018-07-26 | キヤノンメディカルシステムズ株式会社 | X線診断装置 |
| JP2014079441A (ja) * | 2012-10-17 | 2014-05-08 | Toshiba Corp | X線撮影条件設定システム、画像診断装置及びx線撮影条件設定プログラム |
| JP2014083357A (ja) * | 2012-10-26 | 2014-05-12 | Toshiba Corp | 医用画像処理装置、x線診断装置及び医用画像処理プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5661258B2 (ja) | 2015-01-28 |
| US8023616B2 (en) | 2011-09-20 |
| US20100014629A1 (en) | 2010-01-21 |
| DE102008033137A1 (de) | 2010-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5661258B2 (ja) | ダイナミックに適合可能な画像形成システムの位置を調整する方法およびx線システム | |
| JP6334821B2 (ja) | 医用イメージングのために患者をポジショニングするためのガイドシステム | |
| JP6170935B2 (ja) | X線画像化システムのためのポジショニング距離制御 | |
| EP2632384B1 (en) | Adaptive imaging and frame rate optimizing based on real-time shape sensing of medical instruments | |
| JP6118465B2 (ja) | 対象物トラッキング装置 | |
| CN1678250A (zh) | 用于优化x射线图像的成像系统及方法 | |
| US8630468B2 (en) | Imaging method for the representation of the results of intravascular imaging and CFD results and medical system for execution of the method | |
| KR101156306B1 (ko) | 기구 추적 방법 및 장치 | |
| US20070172102A1 (en) | Imaging apparatus and method for the operation thereof | |
| JP2009022754A (ja) | 放射線画像の位置揃えを補正する方法 | |
| US11488313B2 (en) | Generating a motion-compensated image or video | |
| KR20190078853A (ko) | 레이저 표적 투영장치 및 그 제어방법, 레이저 표적 투영장치를 포함하는 레이저 수술 유도 시스템 | |
| WO2015197566A1 (en) | Automatic or assisted region of interest positioning in x-ray diagnostics and interventions | |
| CN102427767B (zh) | 用于计算机断层摄影中低剂量介入引导的数据采集和可视化模式 | |
| JP5405010B2 (ja) | 画像表示装置及び画像表示方法 | |
| CN110267594A (zh) | C型臂计算机断层摄影中的等中心 | |
| JP4795527B2 (ja) | X線画像診断システム | |
| US20220354588A1 (en) | Method and system for providing a corrected dataset | |
| JP2020137796A (ja) | X線診断装置 | |
| JP5458207B2 (ja) | 画像表示装置及び画像表示方法 | |
| CN111513740A (zh) | 血管造影机的控制方法、装置、电子设备、存储介质 | |
| JP5269233B2 (ja) | X線診断装置 | |
| JP2005253572A (ja) | 画像処理装置、x線診断装置、医用画像情報システム、及びキャリブレーションテーブル付帯方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101227 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120613 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120613 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130805 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131101 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140414 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140627 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141203 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5661258 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |