JP2010019822A - センシングシステム - Google Patents
センシングシステム Download PDFInfo
- Publication number
- JP2010019822A JP2010019822A JP2008211019A JP2008211019A JP2010019822A JP 2010019822 A JP2010019822 A JP 2010019822A JP 2008211019 A JP2008211019 A JP 2008211019A JP 2008211019 A JP2008211019 A JP 2008211019A JP 2010019822 A JP2010019822 A JP 2010019822A
- Authority
- JP
- Japan
- Prior art keywords
- pointer
- mirror image
- light source
- area
- sensing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
- G06F3/0428—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means by sensing at the edges of the touch surface the interruption of optical paths, e.g. an illumination plane, parallel to the touch surface which may be virtual
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
Abstract
【解決手段】本発明に係わるセンシングシステムは、ポインターをセンシングし且つポインターの位置を計算することに用いられる。本発明に係わるセンシングシステムは、パネルと、反射エレメントと、イメージ・センサー及びプロセッサーを備える。パネルは、第一平面及び前記第一平面に位置し且つ順次に連接する第一辺、第二辺、第三辺、第四辺を有する四角形である第一エリアを有する。反射エレメントは、第一辺に配置され、且つ第一平面の上に位置する。反射エレメントの第二平面は、反射面であって、パネルの第一平面に直交し、且つ第一エリアを照り映えて第二エリアを形成する。イメージ・センサーは、第三辺と第四辺が交差する隅に配置され、且つ第一平面の上に位置する。イメージ・センサーのセンシング範囲は、第一エリア及び第二エリアを覆う。プロセッサーは、イメージ・センサーに電気接続する。
【選択図】図2
Description
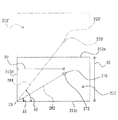
第三ミラー・イメージ及び第四ミラー・イメージは、第二エリアを巡る。第一線状光源、第二ミラー・イメージ及び第三ミラー・イメージは、イメージ・センサーのセンシング範囲内に位置する。
第三ミラー・イメージ240’及び第四ミラー・イメージ212d’は、第二エリア212’を巡る。
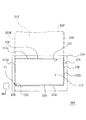
110、210、310、410 パネル
112 タッチ・スクリーン・エリア
112a 一辺
120 第一光センサー
130 第二光センサー
140、260、360 プロセッサー
150、270、370、470、570 ポインター
162、282、382 第一センシング・ライン
164、284、384 第二センシング・ライン
200、300、400、500 センシングシステム
212、312、412、512 第一エリア
212’、 312’ 第二エリア
212a、312a、412a 第一辺
212b、312b、412b 第二辺
212c、312c、412c 第三辺
212d、312d 第四辺
212d’、390’ 第四ミラー・イメージ
214、314、414 第一平面
220、320、420、520 反射エレメント
222 第二平面
230、330 第一線状光源
230’、330’、430’ 第二ミラー・イメージ
240、340 第二線状光源
240’、 340’ 第三ミラー・イメージ
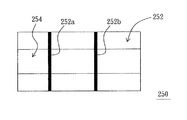
250、350、450、550 イメージ・センサー
252、352、452 イメージ・センシング・ウィンドー
252a 第一暗線
252b 第二暗線
254、354 ブライト・ゾーン
270’、 370’ 第一ミラー・イメージ
272、272’ 先端
352c 第三暗線
386 第三センシング・ライン
390 第三線状光源
430 第一光源
456 フィルター
472 光反射表面
572 発光装置
A1、A3 第一角度
A2、A4 第二角度
A5 第三角度
C1、C2 隅
D1、D3 第一距離
D2、D4 第二距離
D5 第三距離
L1 第一イマジナリー・ライン
L2 第二イマジナリー・ライン
W1 幅
Claims (11)
- ポインターをセンシングし且つポインターの位置を計算することに用いられるセンシングシステムであって、
第一平面及び前記第一平面に位置し且つ順次に連接する第一辺、第二辺、第三辺、第四辺を有する四角形である第一エリアを有するパネルと、
前記第一辺に配置され、且つ前記第一平面の上に位置し、その第二平面は、反射面であって前記第一平面に直交し、且つ前記第一エリアを照り映えて第二エリアを形成する反射エレメントと、
前記第三辺と前記第四辺が交差する隅に配置され、且つ前記第一平面の上に位置し、そのセンシング範囲は、前記第一エリア及び前記第二エリアを覆うイメージ・センサーと、
前記イメージ・センサーに電気接続するプロセッサーとを備え、前記ポインターが前記第一エリアに接近し、且つ前記ポインターが前記反射エレメントに対向して第一ミラー・イメージを形成して、前記ポインターと前記第一ミラー・イメージを前記イメージ・センサーのセンシング範囲に位置させる時、前記第一エリアに接近する前記ポインターの一部分及び前記第二エリアに接近する前記第一ミラー・イメージの一部分が前記イメージ・センサーと同じな線に位置しない時、前記イメージ・センサーは、前記ポインターと前記第一ミラー・イメージをセンシングし、前記プロセッサーは、前記ポインターの位置を計算することを特徴とするセンシングシステム。 - 前記イメージ・センサーは、第一センシング・ラインに沿って前記ポインターをセンシングし、第二センシング・ラインに沿って前記第一ミラー・イメージをセンシングし、且つ前記プロセッサーは、前記第一センシング・ラインと前記第二センシング・ラインによって前記ポインターの位置を計算することを特徴とする請求項1に記載のセンシングシステム。
- 前記第一エリアの形状は、長方形であることを特徴とする請求項2に記載のセンシングシステム。
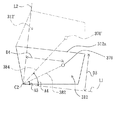
- 前記プロセッサーは、前記第一辺と前記第三辺との間の第一距離「D1」の情報を有し、且つ前記第一センシング・ラインと前記第三辺との間の第一角度「A1」を確定するステップと、前記第二センシング・ラインと前記第三辺との間の第二角度「A2」を確定するステップと、二倍のD1をtanA1とtanA2の和で除算して、前記ポインターと前記第四辺との間の第二距離「D2」を計算するステップにより前記プロセッサーが前記ポインターの位置を計算することを特徴とする請求項3に記載のセンシングシステム。
- 前記第二辺に配置されて且つ前記第一平面に位置する第一線状光源と、前記第三辺に配置されて且つ前記第一平面に位置する第二線状光源とを更に備え、前記第一線状光源は、前記反射エレメントに対向して第二ミラー・イメージを形成し、前記第二線状光源は、前記反射エレメントに対向して第三ミラー・イメージを形成し、前記第四辺は、前記反射エレメントに対向して第四ミラー・イメージを形成し、前記反射エレメント、前記第一線状光源、前記第二線状光源及び前記第四辺は、前記第一エリアを巡り、 前記反射エレメント、前記第二ミラー・イメージ、前記第三ミラー・イメージ及び前記第四ミラー・イメージは、前記第二エリアを巡り、前記第一線状光源、前記第二ミラー・イメージ及び前記第三ミラー・イメージは、前記メージ・センサーのセンシング範囲内に位置することを特徴とする請求項3に記載のセンシングシステム。
- 前記第一エリアの形状は、長方形ではない四角形であることを特徴とする請求項2に記載のセンシングシステム。
- 前記プロセッサーは、前記隅を経て且つ前記第一辺に平行する第一イマジナリー・ラインと前記第一辺との間の第一距離「D3」の情報を有し、且つ前記第一センシング・ラインと前記第一イマジナリー・ラインとの間の第一角度「A3」を確定するステップと、前記第二センシング・ラインと前記第一イマジナリー・ラインとの間の第二角度「A4」を確定するステップと、二倍のD3をtanA3とtanA4の和で除算して、前記隅を経て且つ前記第一辺に直交する第二イマジナリー・ラインと前記ポインターとの間の第二距離「D4」を計算するステップにより、前記プロセッサーが前記ポインターの位置を計算することを特徴とする請求項6に記載のセンシングシステム。
- 前記第二辺に配置されて且つ前記第一平面に位置する第一線状光源と、前記第三辺に配置されて且つ前記第一平面に位置する第二線状光源と、前記第四辺に配置されて且つ前記第一平面に位置する第三線状光源とを更に備え、前記第一線状光源は、前記反射エレメントに対向して第二ミラー・イメージを形成し、前記第二線状光源は、前記反射エレメントに対向して第三ミラー・イメージを形成し、前記第三線状光源は、前記反射エレメントに対向して第四ミラー・イメージを形成し、前記反射エレメント、前記第一線状光源、前記第二線状光源及び前記第三線状光源は、前記第一エリアを巡り、前記反射エレメント、前記第二ミラー・イメージ、前記第三ミラー・イメージ及び前記第四ミラー・イメージは、前記第二エリアを巡り、前記第一線状光源、前記第二ミラー・イメージ、前記第三ミラー・イメージ及び前記第四ミラー・イメージは、前記イメージ・センサーのセンシング範囲に位置することを特徴とする請求項6に記載のセンシングシステム。
- 前記ポインターが前記第一エリアに接近し、且つ前記ポインターが前記反射エレメントに対向して第一ミラー・イメージを形成して、前記ポインターと前記第一ミラー・イメージを前記イメージ・センサーのセンシング範囲に位置させる時、及び前記第一エリアに接近する前記ポインターの一部分及び前記第二エリアに接近する前記第一ミラー・イメージの一部分が前記イメージ・センサーと同じな線に位置する時、前記イメージ・センサーは、第三センシング・ラインに沿って前記ポインターの大きさをセンシングし、前記プロセッサーは、前記ポインターと隅との間の第三距離「D5」の長さと前記第三センシング・ラインに位置する前記ポインターの大きさの対応関係に関する情報を有し、且つ前記プロセッサーは、前記ポインターの大きさによって前記ポインターの位置を計算することを特徴とする請求項1に記載のセンシングシステム。
- 前記センシングシステムは、前記第一平面の上方に配置されて且つ前記第一エリアの外に位置する第一光源を更に備え、前記第一光源は、前記反射エレメントに対向して第二ミラー・イメージを形成し、前記第一光源と前記第二ミラー・イメージは、前記イメージ・センサーのセンシング範囲の外に位置し、前記ポインターは、光反射表面を有し、前記第一光源は、不可視光を出し、前記第一ミラー・イメージは、前記第一光源が前記ポインターの光反射表面を照り映えることにより形成することを特徴とする請求項1に記載のセンシングシステム。
- 前記ポインターは、発光装置を有し、前記第一ミラー・イメージは、前記発光装置からの光線を介して形成することを特徴とする請求項1に記載のセンシングシステム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW97126033 | 2008-07-10 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011049089A Division JP2011117977A (ja) | 2008-07-10 | 2011-03-07 | センシングシステム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010019822A true JP2010019822A (ja) | 2010-01-28 |
Family
ID=41505924
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008211019A Pending JP2010019822A (ja) | 2008-07-10 | 2008-08-19 | センシングシステム |
| JP2011049089A Pending JP2011117977A (ja) | 2008-07-10 | 2011-03-07 | センシングシステム |
| JP2013099802A Pending JP2013178807A (ja) | 2008-07-10 | 2013-05-10 | センシングシステム |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011049089A Pending JP2011117977A (ja) | 2008-07-10 | 2011-03-07 | センシングシステム |
| JP2013099802A Pending JP2013178807A (ja) | 2008-07-10 | 2013-05-10 | センシングシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7689381B2 (ja) |
| JP (3) | JP2010019822A (ja) |
| KR (1) | KR100994526B1 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8427453B2 (en) * | 2008-07-10 | 2013-04-23 | Pixart Imaging Inc. | Optical sensing system |
| US8305363B2 (en) * | 2008-10-10 | 2012-11-06 | Pixart Imaging | Sensing system and locating method thereof |
| US8368668B2 (en) | 2009-06-30 | 2013-02-05 | Pixart Imaging Inc. | Displacement detection system of an optical touch panel and method thereof |
| TWI413925B (zh) * | 2010-06-11 | 2013-11-01 | Pixart Imaging Inc | 光學觸控系統、物件位置計算裝置以及物件位置計算方法 |
| CN102314258B (zh) * | 2010-07-01 | 2013-10-23 | 原相科技股份有限公司 | 光学触控系统、物件位置计算装置以及物件位置计算方法 |
| CN102402345A (zh) * | 2010-09-17 | 2012-04-04 | 原相科技股份有限公司 | 光学式触控装置及其触碰感测方法 |
| TWI441060B (zh) | 2011-04-14 | 2014-06-11 | Pixart Imaging Inc | 一種光學觸控系統之影像處理方法 |
| TWI480784B (zh) | 2011-06-21 | 2015-04-11 | Pixart Imaging Inc | 一種光學觸控系統及其計算物件座標方法 |
| US8860695B2 (en) | 2011-08-05 | 2014-10-14 | Pixart Imaging Inc. | Optical touch system and electronic apparatus including the same |
| US9229578B2 (en) | 2011-08-05 | 2016-01-05 | Pixart Imaging Inc. | Image sensor and optical touch system including the same |
| TWI460636B (zh) * | 2011-09-07 | 2014-11-11 | Pixart Imaging Inc | 光學觸控系統及其定位方法 |
| TWI448918B (zh) * | 2011-09-09 | 2014-08-11 | Pixart Imaging Inc | 光學觸控系統 |
| US8884904B2 (en) * | 2011-10-13 | 2014-11-11 | PixArt Imaging Incorporation, R.O.C. | Touch panel apparatus, system and operation method thereof |
| TWI463375B (zh) * | 2011-10-19 | 2014-12-01 | Pixart Imaging Inc | 光學觸控系統、光學感測模組及其運作方法 |
| CN103076925B (zh) * | 2011-10-26 | 2016-07-06 | 原相科技股份有限公司 | 光学触控系统、光学感测模块及其运作方法 |
| EP2816340B1 (en) * | 2011-11-30 | 2018-02-28 | Shimadzu Corporation | Headspace sample introduction device |
| TWI470475B (zh) | 2012-04-17 | 2015-01-21 | Pixart Imaging Inc | 電子系統 |
| TWI648561B (zh) | 2012-07-16 | 2019-01-21 | 美商唯亞威方案公司 | 光學濾波器及感測器系統 |
| US9489085B2 (en) | 2012-10-08 | 2016-11-08 | PixArt Imaging Incorporation, R.O.C. | Optical touch panel system and positioning method thereof |
| US9213448B2 (en) | 2012-11-29 | 2015-12-15 | Pixart Imaging Inc. | Positioning module, optical touch system and method of calculating a coordinate of a touch medium |
| TWI475448B (zh) * | 2012-11-29 | 2015-03-01 | Pixart Imaging Inc | 座標定位模組、光學式觸控系統及其計算觸控媒介之座標的方法 |
| US20220067953A1 (en) * | 2020-09-02 | 2022-03-03 | International Business Machines Corporation | Reflection-based monoscopic depth perception |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59211128A (ja) * | 1983-05-09 | 1984-11-29 | ウェルスーガードナー エレクトロニクス コーポレイション | 光学的位置検出装置 |
| JPH113170A (ja) * | 1997-06-13 | 1999-01-06 | Wacom Co Ltd | 光デジタイザ |
| JP2005025415A (ja) * | 2003-06-30 | 2005-01-27 | Sony Corp | 位置検出装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2217536C2 (de) * | 1972-04-12 | 1974-05-09 | Carl Schenck Maschinenfabrik Gmbh, 6100 Darmstadt | Anordnung zur Regelung einer dynamischen Prüfanlage, insbesondere für eine hydraulisch angetriebene |
| US4507557A (en) * | 1983-04-01 | 1985-03-26 | Siemens Corporate Research & Support, Inc. | Non-contact X,Y digitizer using two dynamic ram imagers |
| US4782328A (en) * | 1986-10-02 | 1988-11-01 | Product Development Services, Incorporated | Ambient-light-responsive touch screen data input method and system |
| JPH0736603A (ja) * | 1993-07-16 | 1995-02-07 | Wacom Co Ltd | 二次元位置検出装置 |
| JPH0883415A (ja) * | 1994-07-15 | 1996-03-26 | Sony Corp | 信号記録及び/又は再生装置、信号記録及び/又は再生方法並びに記録媒体 |
| DE19539955A1 (de) | 1995-10-26 | 1997-04-30 | Sick Ag | Optische Erfassungseinrichtung |
| US6036189A (en) * | 1998-05-19 | 2000-03-14 | Williams Electronics Games, Inc. | Game with viewing panel having variable optical characteristics for producing virtual images |
| US6803906B1 (en) | 2000-07-05 | 2004-10-12 | Smart Technologies, Inc. | Passive touch system and method of detecting user input |
| US7442914B2 (en) * | 2003-09-12 | 2008-10-28 | Flatfrog Laboratories Ab | System and method of determining a position of a radiation emitting element |
| US20090090569A1 (en) * | 2005-10-13 | 2009-04-09 | Cho-Yi Lin | Sensing System |
| US20070165007A1 (en) * | 2006-01-13 | 2007-07-19 | Gerald Morrison | Interactive input system |
| JP5025552B2 (ja) * | 2008-04-16 | 2012-09-12 | キヤノン株式会社 | タッチパネル |
-
2008
- 2008-08-19 JP JP2008211019A patent/JP2010019822A/ja active Pending
- 2008-09-29 KR KR1020080095265A patent/KR100994526B1/ko active IP Right Grant
- 2008-10-10 US US12/249,222 patent/US7689381B2/en not_active Expired - Fee Related
-
2011
- 2011-03-07 JP JP2011049089A patent/JP2011117977A/ja active Pending
-
2013
- 2013-05-10 JP JP2013099802A patent/JP2013178807A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59211128A (ja) * | 1983-05-09 | 1984-11-29 | ウェルスーガードナー エレクトロニクス コーポレイション | 光学的位置検出装置 |
| JPH113170A (ja) * | 1997-06-13 | 1999-01-06 | Wacom Co Ltd | 光デジタイザ |
| JP2005025415A (ja) * | 2003-06-30 | 2005-01-27 | Sony Corp | 位置検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013178807A (ja) | 2013-09-09 |
| US20100010773A1 (en) | 2010-01-14 |
| US7689381B2 (en) | 2010-03-30 |
| KR20100007673A (ko) | 2010-01-22 |
| JP2011117977A (ja) | 2011-06-16 |
| KR100994526B1 (ko) | 2010-11-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2010019822A (ja) | センシングシステム | |
| US20090090569A1 (en) | Sensing System | |
| KR101123932B1 (ko) | 광학식 터치 감지 시스템 및 그 방법 | |
| US8135561B2 (en) | Sensing system | |
| TWI441047B (zh) | 感測系統 | |
| TWI453642B (zh) | 多點觸控面板及手勢辨識之方法 | |
| TWI430151B (zh) | 觸控裝置及其觸控方法 | |
| US9471180B2 (en) | Optical touch panel system, optical apparatus and positioning method thereof | |
| JP5351218B2 (ja) | 導光体及びこれを用いた光学式タッチパネル | |
| US8232511B2 (en) | Sensing system adapted to sense a pointer and calculate a location of the pointer | |
| US9019243B2 (en) | Optical coordinate input device | |
| US9323394B2 (en) | Touch control apparatus and associated selection method | |
| US8912482B2 (en) | Position determining device and method for objects on a touch device having a stripped L-shaped reflecting mirror and a stripped retroreflector | |
| TWI451310B (zh) | 光學觸控模組及其光源模組 | |
| TWI587196B (zh) | 光學觸控系統及光學觸控位置檢測方法 | |
| JP2011122867A (ja) | 光学式位置検出装置および位置検出機能付き表示装置 | |
| TWI705366B (zh) | 光學觸控裝置與光學觸控方法 | |
| TWI520037B (zh) | 光學觸控系統、光學裝置及其定位方法 | |
| TWI460636B (zh) | 光學觸控系統及其定位方法 | |
| JP2010108493A (ja) | センサーシステム | |
| TWI471785B (zh) | 光學觸控模組 | |
| TWI423095B (zh) | 利用不同時形成的光域之物體偵測系統及方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101207 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110329 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110628 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110726 |