JP2010019717A - クローズドループ方式光干渉角速度計 - Google Patents
クローズドループ方式光干渉角速度計 Download PDFInfo
- Publication number
- JP2010019717A JP2010019717A JP2008181048A JP2008181048A JP2010019717A JP 2010019717 A JP2010019717 A JP 2010019717A JP 2008181048 A JP2008181048 A JP 2008181048A JP 2008181048 A JP2008181048 A JP 2008181048A JP 2010019717 A JP2010019717 A JP 2010019717A
- Authority
- JP
- Japan
- Prior art keywords
- output
- light
- converter
- sample
- hold unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Gyroscopes (AREA)
Abstract
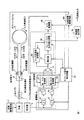
【解決手段】受光器6からの電気信号は、復調部10で復調される。この復調信号がA/D変換されて、ディジタル信号処理装置30に入力される。復調部10は、受光器6からの電気信号についてサンプルホールド処理を行う第一サンプルホールド部11と、第一サンプルホールド部11の出力を入力とする第一ローパスフィルタ13と、上記電気信号についてサンプルホールド処理を行う第二サンプルホールド部12と、第二サンプルホールド部12の出力を入力とする第二ローパスフィルタ14とを備える。ディジタル信号処理装置30は減算器31を備えており、第一ローパスフィルタ13の出力から第二ローパスフィルタ14の出力を減算する処理を行う。
【選択図】図1
Description
光源駆動回路1によって制御された光源2から一定強度の光が照射される。この光は光ファイバで伝送され、光カプラ3を経由して、光学素子4に入射する。光学素子4として、例えば、ニオブ酸リチウム(LiNbO3)の光学結晶に導波路を形成し、光分岐結合器9、位相変調器7、位相変調器8を集積化した光集積回路を用いる。入射した光は、光分岐結合器9によって二つのルートに分岐され、一方がCW(clockwise)光として光ファイバコイル5の一端に入射し光ファイバコイル5を周回して他端に至り、他方がCCW(counter-clockwise)光として光ファイバコイル5の他端に入射し光ファイバコイル5を周回して一端に至ることになる。なお、この明細書では、「時計回り」と「反時計回り」を図面を正面に見たときの時計回りと反時計回りとして説明する。
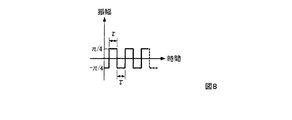
図7に示す構成では、CW光は、光ファイバコイル5を周回する前に、位相変調器7によって位相変調を受け、CCW光は、光ファイバコイル5を周回した後に、位相変調器7によって位相変調を受ける。従って、同一時点で分岐されたCW光とCCW光とで位相変調を受ける時点がτだけずれているため、CW光とCCW光とでは相対的に+π/2と−π/2の位相差が与えられることになる。

サニャック位相差Δφsは、式(6)で与えられる。Rは、光ファイバコイル5の半径[m]、Lは光ファイバコイル5の光ファイバ長[m]、cは光速[m/s]、λは光源波長[m]、nは光ファイバコイル5のコア部の屈折率を表す。
光学素子4の光分岐結合器9によってCW光とCCW光が光学的に結合した干渉光は、光カプラ3に入射して分岐される。分岐されて光カプラ3の出力となった干渉光は、受光器6に入射して光電変換される。光電変換されて生成されたアナログの電気信号は、A/D変換器25に入力され、ディジタル信号に変換される。このディジタル信号は、ディジタル信号処理装置35に入力される。
A/D変換器25の出力であるディジタル信号は、同期検波回路36に入力される。同期検波回路36は、このディジタル信号に対して同期検波を行い、干渉光強度差ΔIつまりサニャック位相差Δφsに対応した信号を出力する。そして、積分器37は、同期検波回路36の出力信号を入力とし、この入力を時間積分した積分値(ディジタル値の累積加算値)を出力する。
CW光の変調位相(図11(a)で実線で示されている)と、CCW光の変調位相(図11(a)で破線で示されている)とでは、位相変調を受ける時点がτだけずれているため、時間軸方向にτだけずれが生じる。ここでフィードバック信号である階段状鋸歯状波の階段の幅は時間τに設定されており、CW光の変調位相とCCW光の変調位相との位相差は、図11(b)に示されるとおりとなる。つまり、CW光とCCW光との間に−ΔφsあるいはφR(2mπ)−Δφsの位相差が与えられ、サニャック位相差Δφs(図11(a)で破線で示されている)が打ち消される。
図1は、本発明であるクローズドループ方式光干渉角速度計の一実施形態の構成を示している。図7に示す従来のクローズドループ方式光干渉角速度計の構成要素と同一の構成要素には同じ符号を割り当てて説明を省略する。
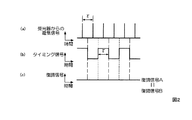
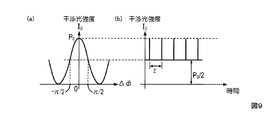
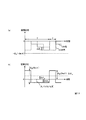
入力角速度が無い場合、図9(b)に示す干渉光強度に対応した電気信号波形は図2(a)に示すとおりとなる。図2(a)の縦軸は受光器6からの電気信号の振幅、横軸は時間を表す。第一サンプルホールド部11と第二サンプルホールド部12に入力されるタイミング信号は、図2(b)に示すように、位相変調器7に入力される位相変調信号に対して位相がπ/2ずれた矩形波とされる。図2(b)の縦軸は振幅、横軸は時間を表す。
積分器37以降の処理は従来と同様である。
既述の実施形態の変形例を説明する。
既述の実施形態では、従来例との対比から、ディジタル信号処理装置30にランプ波高値制御部39を含む構成を示した(図1参照)。しかし、フィードバック信号発生回路38が発生するフィードバック信号の最大振幅を動的に制御することなく一定に設定する場合にはランプ波高値制御部39を設ける必要が無い。ランプ波高値制御部39を設けない場合の構成を図4に示す。
積分器37以降の処理は従来と同様である。
3 光カプラ
4 光学素子
5 光ファイバコイル
6 受光器
7 位相変調器
8 位相変調器
9 光分岐結合器
10 復調部
11 第一サンプルホールド部
12 第二サンプルホールド部
13 第一ローパスフィルタ
14 第二ローパスフィルタ
20 A/D変換部
21 第一A/D変換器
22 第二A/D変換器
23 マルチプレクサ
24 A/D変換器
30 ディジタル信号処理装置
31 減算器
37 積分器
38 フィードバック信号発生器
39 ランプ波高値制御部
40 D/A変換器
50 タイミング信号発生回路
60 位相変調駆動回路
70 角速度出力部
Claims (3)
- 角速度により惹起したサニャック効果に基づく光の位相変化(サニャック位相差)をゼロとするようにフィードバック制御を行うことで当該角速度を検出するクローズドループ方式光干渉角速度計において、
光源と、
光ファイバコイルと、
上記光源からの光を分岐して上記光ファイバコイルの両端に入射し両回り光とすると共に上記光ファイバコイルを伝播して回帰した当該両回り光を結合干渉させる光分岐結合器と、
周期的な位相変調信号による位相差を上記両回り光間に与える第一の位相変調器と、
上記光分岐結合器によって結合干渉した干渉光を分岐する光カプラと、
上記光カプラからの干渉光の強度を電気信号に変換する受光器と、
上記受光器からの電気信号を復調する復調部と、
上記復調部の出力をA/D変換するA/D変換部と、
上記A/D変換部の出力に基づき、上記両回り光間のサニャック位相差をゼロとするようなフィードバック信号を発生するディジタル信号処理装置と、
上記ディジタル信号処理装置からのフィードバック信号をD/A変換するD/A変換器と、
上記D/A変換器の出力により位相差を上記両回り光間に与える第二の位相変調器とを備え、
上記復調部は、
上記受光器からの電気信号についてサンプルホールド処理を行う第一サンプルホールド部と、
上記第一サンプルホールド部の出力を入力とする第一ローパスフィルタと、
上記受光器からの電気信号についてサンプルホールド処理を行う第二サンプルホールド部と、
上記第二サンプルホールド部の出力を入力とする第二ローパスフィルタとを備え、
上記第一サンプルホールド部がサンプル処理を行うとき上記第二サンプルホールド部はホールド処理を行うとされ、上記第二サンプルホールド部がサンプル処理を行うとき上記第一サンプルホールド部はホールド処理を行うとされ、上記位相変調信号の周期の半分毎に、上記第一サンプルホールド部のサンプル処理と上記第二サンプルホールド部のサンプル処理とが交互に切り替わる
ことを特徴とするクローズドループ方式光干渉角速度計。 - 上記A/D変換部は、
上記第一ローパスフィルタの出力をA/D変換する第一A/D変換器と、
上記第二ローパスフィルタの出力をA/D変換する第二A/D変換器とを備え、
上記ディジタル信号処理装置は、
上記第一A/D変換器の出力から上記第二A/D変換器の出力を減算する減算器と、
上記減算器の出力を積分する積分器と、
上記積分器の出力を入力として上記フィードバック信号を発生するフィードバック信号生成回路とを備える
ことを特徴とする請求項1に記載のクローズドループ方式光干渉角速度計。 - 上記A/D変換部は、
上記位相変調信号の周期の半分毎に、上記第一ローパスフィルタの出力と上記第二ローパスフィルタの出力を交互に選択するマルチプレクサと、
上記マルチプレクサによって選択された上記出力をA/D変換するA/D変換器とを備え、
上記ディジタル信号処理装置は、
上記A/D変換器の出力を遅延する遅延器と、
上記A/D変換器の出力から上記遅延器の出力を減算する減算器と、
上記減算器の出力を積分する積分器と、
上記積分器の出力を入力として上記フィードバック信号を発生するフィードバック信号生成回路とを備える
ことを特徴とする請求項1に記載のクローズドループ方式光干渉角速度計。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008181048A JP4922256B2 (ja) | 2008-07-11 | 2008-07-11 | クローズドループ方式光干渉角速度計 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008181048A JP4922256B2 (ja) | 2008-07-11 | 2008-07-11 | クローズドループ方式光干渉角速度計 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010019717A true JP2010019717A (ja) | 2010-01-28 |
| JP4922256B2 JP4922256B2 (ja) | 2012-04-25 |
Family
ID=41704774
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008181048A Active JP4922256B2 (ja) | 2008-07-11 | 2008-07-11 | クローズドループ方式光干渉角速度計 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4922256B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002500376A (ja) * | 1997-12-31 | 2002-01-08 | ハネウエル インコーポレーテツド | 光ファイバジャイロスコープ |
| JP2006177893A (ja) * | 2004-12-24 | 2006-07-06 | Japan Aviation Electronics Industry Ltd | 光干渉角速度計 |
-
2008
- 2008-07-11 JP JP2008181048A patent/JP4922256B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002500376A (ja) * | 1997-12-31 | 2002-01-08 | ハネウエル インコーポレーテツド | 光ファイバジャイロスコープ |
| JP2006177893A (ja) * | 2004-12-24 | 2006-07-06 | Japan Aviation Electronics Industry Ltd | 光干渉角速度計 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4922256B2 (ja) | 2012-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1835258B1 (en) | Digital feedback method for optical gyroscopes | |
| CN102636187B (zh) | 一种高度互易的谐振式光学陀螺的检测装置及方法 | |
| JP3808820B2 (ja) | 光サンプリング方法、装置およびプログラム | |
| CN110360998A (zh) | 一种基于脉冲光探测的谐振式光学陀螺的检测系统及方法 | |
| CN110360997A (zh) | 一种时分复用的谐振式光学陀螺的检测系统及方法 | |
| JP5362180B2 (ja) | 光ファイバ・ジャイロスコープの非同期復調 | |
| US20080218765A1 (en) | Signal Processing For A Sagnac Interferometer | |
| JP4922256B2 (ja) | クローズドループ方式光干渉角速度計 | |
| JP5654823B2 (ja) | 光ファイバジャイロスコープにおける限られた電源品質でジャイロスコープ誤差を低減するシステム | |
| EP1701186A1 (en) | Electro-optic delay line discriminator | |
| US5767969A (en) | Gyrometric detection method and sampled optical gyrometer to implement said method | |
| JP4847512B2 (ja) | クローズドループ方式光干渉角速度計 | |
| JP2007101325A (ja) | 散乱光測定装置 | |
| JP2532326B2 (ja) | 光干渉角速度計 | |
| EP1962445A2 (en) | Optical transmitter | |
| JPH04223213A (ja) | 光干渉角速度計 | |
| JP2008154230A (ja) | 光学的分配回路網を有する光電気発振器クロック | |
| JP2005300208A (ja) | 光干渉型センサ | |
| CN114264294A (zh) | 基于组合调制低相干光集成化的角速度检测系统及方法 | |
| JP3390943B2 (ja) | 光干渉角速度計 | |
| JP2008242282A (ja) | ディジタル制御自動バイアス制御回路 | |
| JP3174889B2 (ja) | 光ファイバジャイロ | |
| CN118463959A (zh) | 一种用于光纤陀螺的多态调制解调方法及光纤陀螺 | |
| CN117705079A (zh) | 一种抑制宽谱光源谐振式光纤陀螺噪声的装置和方法 | |
| JP2003004453A (ja) | 光干渉角速度計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100405 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120124 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120203 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4922256 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150210 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |