JP2010017842A - アンバランス状態を定量的に検出する方法および装置と工作物のクランプ状態を検出する方法 - Google Patents
アンバランス状態を定量的に検出する方法および装置と工作物のクランプ状態を検出する方法 Download PDFInfo
- Publication number
- JP2010017842A JP2010017842A JP2009161153A JP2009161153A JP2010017842A JP 2010017842 A JP2010017842 A JP 2010017842A JP 2009161153 A JP2009161153 A JP 2009161153A JP 2009161153 A JP2009161153 A JP 2009161153A JP 2010017842 A JP2010017842 A JP 2010017842A
- Authority
- JP
- Japan
- Prior art keywords
- rotating shaft
- unbalance
- signal
- angle
- workpiece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 72
- 230000001133 acceleration Effects 0.000 claims abstract description 32
- 230000005484 gravity Effects 0.000 claims abstract description 19
- 238000001514 detection method Methods 0.000 claims description 10
- 238000005381 potential energy Methods 0.000 claims description 8
- 238000004364 calculation method Methods 0.000 claims description 7
- 238000005259 measurement Methods 0.000 claims description 7
- 230000008859 change Effects 0.000 claims description 4
- 230000005284 excitation Effects 0.000 claims description 4
- 238000001914 filtration Methods 0.000 claims description 4
- 238000006073 displacement reaction Methods 0.000 claims 1
- 238000012360 testing method Methods 0.000 description 42
- 238000003754 machining Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 4
- 238000001228 spectrum Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 3
- 239000010432 diamond Substances 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000005452 bending Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 1
- 238000000227 grinding Methods 0.000 description 1
- 238000003801 milling Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M1/00—Testing static or dynamic balance of machines or structures
- G01M1/14—Determining imbalance
- G01M1/16—Determining imbalance by oscillating or rotating the body to be tested
- G01M1/24—Performing balancing on elastic shafts, e.g. for crankshafts
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Testing Of Balance (AREA)
- Control Of Direct Current Motors (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
【解決手段】回転シャフトの回転運動エネルギーおよび位置エネルギーにしたがって、回転シャフトのアンバランス量変数とアンバランス角変数とを含むラグランジュ運動学方程式を確定し、位置信号と速度信号と加速度信号とトルク信号とにしたがって、非線形多変数法により方程式を解くことにより、回転シャフトのアンバランス量の値とアンバランス角の値とを獲得する段階と、を包含し、回転シャフトのアンバランス量が、回転シャフトの重心から回転シャフトの軸までの垂直線分の長さと回転シャフトの質量との積であり、該回転シャフトのアンバランス角が、回転シャフトの重心から回転シャフトの軸までの垂直線分と回転シャフトの水平軸面との間の挟角である。
【選択図】図1
Description
回転シャフトのアンバランス状態により発生する遠心力は、スムーズな回転に影響する。
回転シャフトのアンバランス状態は、振動発生の結果を招く主な原因である。
回転シャフトのアンバランス状態による振動は、工作物を細動させて機械加工に影響する。
回転シャフトのアンバランス状態は、結果的にベアリングの過剰な磨耗およびベアリング構造の過労を生じる。
回転シャフトのアンバランス状態は、結果的にパワー損失を生じる。
回転シャフトを駆動する段階と、
回転シャフトの位置信号と速度信号と加速度信号とトルク信号とを獲得する段階と、
回転シャフトの回転運動エネルギーおよび位置エネルギーにしたがって、回転シャフトのアンバランス量変数およびアンバランス角変数を含むラグランジュ運動学方程式を確定して、この位置信号と速度信号と加速度信号とトルク信号とにしたがって、非線形多変数方法によりこの方程式を解くことにより回転シャフトのアンバランス量の値およびアンバランス角の値を獲得する段階と、
を包含し、
回転シャフトのアンバランス量が、回転シャフトの重心から回転シャフトの軸までの垂直線分の長さと回転シャフトの質量との積であり、回転シャフトのアンバランス角が、回転シャフトの重心から回転シャフトの軸までの垂直線分と回転シャフトの水平軸面との間の挟角である。
回転シャフトを駆動するための回転シャフト駆動ユニットと、
位置信号と速度信号と加速度信号とトルク信号とを獲得するための信号獲得ユニットと、
回転シャフトの回転運動エネルギーおよび位置エネルギーにしたがって、回転シャフトのアンバランス量変数およびアンバランス角変数を含むラグランジュ運動学方程式を確定するためと、上記信号獲得ユニットにより獲得された位置信号と速度信号と加速度信号とトルク信号とにしたがって非線形多変数法で方程式を解くことにより回転シャフトのアンバランス量の値およびアンバランス角の値を獲得するためのアンバランス量値アンバランス角計算ユニットと、
を包含し、
回転シャフトのアンバランス量が、回転シャフトの重心から回転シャフトの軸までの垂直線分と回転シャフトの質量との積であり、アンバランス角が、回転シャフトの重心から回転シャフトの軸までの垂直線分と回転シャフトの水平軸面との間の挟角である。
工作物がクランプされていない状態でのアンバランスオフセットベクトルを獲得するように、回転シャフトのアンバランス状態を量的に検出するための方法を用いて、工作物がクランプされていない状態での回転シャフトのアンバランス幅およびアンバランス角を検出する段階と、
工作物がクランプされた後でのアンバランスオフセットベクトルを獲得するように、回転シャフトのアンバランス状態を量的に検出するための方法を用いて、工作物がクランプされた後での回転シャフトのアンバランス幅およびアンバランス角を検出する段階と、
工作物がクランプされていない状態でのアンバランスオフセットベクトルと工作物がクランプされた後でのアンバランスオフセットベクトルとの間の差分ベクトルを計算する段階と、
この差分ベクトルにしたがって工作物のクランプ状態を判断する段階であって、差分ベクトルが大きくなるほど、工作物のアンバランスオフセットが大きくなり、工作物のクランプ状態が悪化する段階と、
を包含する。
U=m・r (1)
であり、回転シャフトのアンバランス角はθ0である。回転シャフトの回転運動エネルギーは以下のように計算できる。

P=mgr[1+sin(θ0+θ)] (3)
ラグランジュ運動力学方程式は次のように確定される。
τは回転シャフトのトルク信号であり、方程式(2)および(3)を方程式(5)に代入すると、以下が得られる。
FcrおよびFvrはそれぞれ、回転シャフトの反時計方向回転におけるクーロン摩擦係数および粘性摩擦係数である。
図6(b):質量0.165kgの追加負荷が、回転シャフトのr=0.0775m、θ0=60°に加えられた。
図6(c):質量0.165kgの追加負荷が、回転シャフトのr=0.0175m、θ0=60°に加えられた。
図6(d):質量0.165kgの追加負荷が、回転シャフトのr=0.0175m、θ0=240°に加えられた。
図6(e):質量0.165kgの追加負荷が、回転シャフトのr=0.0775m、θ0=240°に加えられた。
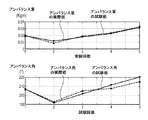
試験1:回転シャフトに追加負荷が加えられなかった。
試験2:質量0.038kgの追加負荷が回転シャフトのr=0.055m、θ0=270°に加えられた。
試験3:質量0.038kgの追加負荷が回転シャフトのr=0.055m、θ0=30°に加えられた。
20 工作ヘッド
30 心押し台
100 回転シャフトの軸
110 工作物の軸
d1,d2,d3 軸100と軸110との間の距離
β 傾斜角
r 垂直線分
P 位置エネルギー
θ0 挟角
Claims (11)
- 回転シャフトのアンバランス状態を定量的に検出する方法において、
前記回転シャフトを駆動する段階と、
前記回転シャフトについて位置信号と速度信号と加速度信号とトルク信号とを獲得する段階と、
前記回転シャフトの回転運動エネルギーおよび位置エネルギーにしたがって、該回転シャフトのアンバランス量変数とアンバランス角変数とを含むラグランジュ運動学方程式を確定し、前記位置信号と速度信号と加速度信号とトルク信号とにしたがって、非線形多変数法により該方程式を解くことにより該回転シャフトの該アンバランス量の値と該アンバランス角の値とを獲得する段階と、
を包含し、
前記回転シャフトの前記アンバランス量が、該回転シャフトの重心から該回転シャフトの軸までの垂直線分の長さと該回転シャフトの質量との積であり、該回転シャフトの前記アンバランス角が、該回転シャフトの重心から該回転シャフトの軸までの垂直線分と該回転シャフトの水平軸面との間の挟角であることを特徴とする方法。 - 前記回転シャフトの位置信号と速度信号と加速度信号とトルク信号とを獲得した後で、該信号にフィルタリングが実施されることを特徴とする請求項1に記載の方法。
- 前記回転シャフトを駆動するためモータが励磁され、該モータの励磁信号としてS字形と正弦曲線との合成速度プロフィールが使用され、該合成速度プロフィールが、位置プロフィールと速度プロフィールと加速度プロフィールとを包含し、該プロフィールが、時間軸の方向に、加速段階と正弦曲線速度プロフィール段階と減速段階とに分割され、該速度プロフィールが、該加速および減速段階における該モータの速度が突然変化しないように選択されることを特徴とする請求項1または2に記載の方法。
- 前記回転シャフトのアンバランス量Uが、
U=m・r
であって、mは前記回転シャフトの質量であり、rは該回転シャフトの重心から該回転シャフトの軸までの距離であることを特徴とする請求項3に記載の方法。 - 前記回転シャフトの回転運動エネルギーKが、
は該回転シャフトの速度信号であることを特徴とする請求項4に記載の方法。 - 前記回転シャフトの位置エネルギーPが、
P=mgr[1+sin(θ0+θ)]
であって、gは重力加速度であり、θ0は回転シャフトのアンバランス角であり、θは前記回転シャフトの位置信号であることを特徴とする請求項5に記載の方法。 - 前記回転シャフトのアンバランス量変数およびアンバランス角変数を含むラグランジュの運動方程式が、該回転シャフトの回転運動エネルギーKおよび位置エネルギーPを用いて、
L=K−P
すなわち、
は、回転シャフトの加速度信号であることを特徴とする請求項6に記載の方法。 - 方程式
が、クーロン摩擦と粘性摩擦とを導入して、
FcfとFvfは、それぞれ前記シャフトが正方向に回転している時のクーロン摩擦係数および粘性摩擦係数であり、
FcrとFvrは、それぞれ前記シャフトが逆方向に回転している時のクーロン摩擦係数および粘性摩擦係数であり、
と
は、前記シャフトがそれぞれ正方向と逆方向に回転している時の速度信号であり、
εは、モデル測定誤差であることを特徴とする請求項7に記載の方法。 - 非線形最小二乗法を用いることを特徴とする請求項8に記載の方法。
- 回転シャフトのアンバランス状態を定量的に検出する装置において、
前記回転シャフトを駆動するための回転シャフト駆動ユニット(310)と、
位置信号と速度信号と加速度信号とトルク信号とを獲得するための信号獲得ユニット(320)と、
前記回転シャフトの回転運動エネルギーおよび位置エネルギーにしたがって該回転シャフトのアンバランス量変数およびアンバランス角変数を含むラグランジュ運動学方程式を確定するためと、前記信号獲得ユニットにより獲得された前記位置信号と前記速度信号と前記加速度信号と前記トルク信号とにしたがって非線形多変数法により該方程式を解くことにより該回転シャフトのアンバランス量の値およびアンバランス角の値を獲得するためのアンバランス量値アンバランス角計算ユニット(330)と、
を包含し、
前記回転シャフトの前記アンバランス量が、該回転シャフトの重心から該回転シャフトの軸までの垂直線分の長さと該回転シャフトの質量との積であり、前記アンバランス角が、該回転シャフトの重心から該回転シャフトの軸までの垂直線分と該回転シャフトの水平軸面との間の挟角であることを特徴とする装置。 - 工作物のクランプ状態を検出する方法において、
前記工作物が、クランプされていない状態でのアンバランスオフセットベクトルを獲得するように、請求項1から9のいずれか一つに記載の回転シャフトアンバランス状態量的検出方法を用いて、該工作物がクランプされていない状態での前記回転シャフトのアンバランス量およびアンバランス角を検出する段階であって、
前記工作物が、クランプされた後でのアンバランスオフセットベクトルを獲得するように、請求項1から9のいずれか一つに記載の回転シャフトアンバランス状態量的検出方法を用いて、該工作物がクランプされた後での該回転シャフトのアンバランス量およびアンバランス角を検出する段階であって、
前記工作物がクランプされていない状態での前記アンバランスオフセットベクトルと、該工作物がクランプされた後での前記アンバランスオフセットベクトルとの差分ベクトルを計算する段階であって、
前記差分ベクトルにしたがって前記工作物のクランプ状態を判断する段階であって、前記差分ベクトル
のARが大きくなるほど、該工作物のアンバランスのずれが大きくなり、該工作物のクランプ状態が悪化する段階と、
を包含することを特徴とする方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2008101356395A CN101625277B (zh) | 2008-07-07 | 2008-07-07 | 不平衡状态定量检测方法和装置及工件装夹状态检测方法 |
| CN200810135639.5 | 2008-07-07 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010017842A true JP2010017842A (ja) | 2010-01-28 |
| JP2010017842A5 JP2010017842A5 (ja) | 2012-06-07 |
| JP5449889B2 JP5449889B2 (ja) | 2014-03-19 |
Family
ID=41428894
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009161153A Expired - Fee Related JP5449889B2 (ja) | 2008-07-07 | 2009-07-07 | アンバランス状態を定量的に検出する方法および装置と工作物のクランプ状態を検出する方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8225657B2 (ja) |
| JP (1) | JP5449889B2 (ja) |
| CN (1) | CN101625277B (ja) |
| DE (1) | DE102009025481A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105738033A (zh) * | 2016-03-22 | 2016-07-06 | 郭卫建 | 转子的不平衡量的获取方法 |
| KR20190006377A (ko) * | 2017-07-10 | 2019-01-18 | 정윤석 | 시앤시 가공시간 예측 디지털 경광등 |
| JPWO2024127624A1 (ja) * | 2022-12-16 | 2024-06-20 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8291764B2 (en) * | 2009-08-14 | 2012-10-23 | Lenz Michael A W | Method and apparatus for in situ unbalance and corrective balance determination for a non-vertical axis rotating assembly |
| US9664041B2 (en) * | 2013-12-12 | 2017-05-30 | Caterpillar Global Mining Expanded Products Pty Ltd | Drill rig |
| DE102014100126B4 (de) * | 2014-01-08 | 2016-01-07 | Kerntech Gmbh | Verfahren zur Bestimmung einer Unwucht eines Rotors |
| CN103759960B (zh) * | 2014-01-16 | 2016-04-06 | 北京工业大学 | 一种数控磨床头架可靠性试验装置 |
| CN104215395B (zh) * | 2014-09-09 | 2016-11-23 | 中国石油大学(北京) | 一种转子不平衡故障的检测方法及装置 |
| CN106289645B (zh) * | 2016-11-07 | 2020-05-01 | 北京东方振动和噪声技术研究所 | 基于稳态激励法的转子动平衡测定方法与装置 |
| EP3432099B1 (en) * | 2017-07-20 | 2021-09-01 | Siemens Aktiengesellschaft | Method and system for detection of an abnormal state of a machine |
| CN109894285B (zh) * | 2017-12-07 | 2021-05-14 | 上海力申科学仪器有限公司 | 离心机不平衡检测系统及方法 |
| DE102018102751B3 (de) * | 2018-02-07 | 2019-02-21 | Schenck Rotec Gmbh | Verfahren zur Messung der Unwucht wellenelastischer Rotoren mittels wegmessender Sensoren |
| ES2960817T3 (es) * | 2019-05-07 | 2024-03-06 | Safe Load Testing Tech S L | Procedimientos y dispositivos sin impacto para probar la rigidez y/o la estabilidad de una o más cargas |
| CN118258547B (zh) * | 2024-05-31 | 2024-08-23 | 远届测控设备(青岛)有限公司 | 一种多工况下的轴类动平衡检测系统和装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03228542A (ja) * | 1990-01-31 | 1991-10-09 | Okuma Mach Works Ltd | 工具のアンバランスのチェック方法及び除去方法 |
| US5543698A (en) * | 1994-09-27 | 1996-08-06 | Allen-Bradley Company, Inc. | Method and apparatus used with AC motor for detecting unbalance |
| JPH1043987A (ja) * | 1996-07-31 | 1998-02-17 | Nippei Toyama Corp | 静圧軸受に支持される回転軸のバランス修正方法 |
| JP2001129743A (ja) * | 1999-08-20 | 2001-05-15 | Disco Abrasive Syst Ltd | 切削装置の回転バランス調整機構 |
| JP2008043637A (ja) * | 2006-08-21 | 2008-02-28 | Samsung Electronics Co Ltd | 回転体制御装置及びこれを備える洗濯機 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4214179A (en) * | 1979-03-15 | 1980-07-22 | Beckman Instruments, Inc. | Rotor imbalance detector for a centrifuge |
| US5800331A (en) * | 1997-10-01 | 1998-09-01 | Song; Jin Y. | Imbalance detection and rotor identification system |
| IL124932A0 (en) * | 1998-06-16 | 1999-01-26 | Mea Motor Inspection Ltd | Method and apparatus for testing rotating machines |
| US7905122B2 (en) | 2003-04-28 | 2011-03-15 | Nidec Motor Corporation | Method and system for determining a washing machine load unbalance |
| US7630869B2 (en) * | 2003-05-27 | 2009-12-08 | University Of Washington | Method for predicting vibrational characteristics of rotating structures |
| CN101248342B (zh) * | 2005-08-26 | 2012-03-21 | 蒂森克虏伯Egm有限公司 | 用于对带转子的试验物进行振动测量的带平衡设备的装置 |
| CN101296838B (zh) * | 2005-12-01 | 2011-05-11 | 株式会社村田制作所 | 防翻倒控制装置 |
| US7437264B2 (en) * | 2006-06-19 | 2008-10-14 | General Electric Company | Methods and apparatus for balancing a rotor |
| US7902719B2 (en) * | 2008-01-25 | 2011-03-08 | The Boeing Company | Apparatus and method for affecting physical parameter associated with a shaft |
-
2008
- 2008-07-07 CN CN2008101356395A patent/CN101625277B/zh not_active Expired - Fee Related
-
2009
- 2009-06-18 DE DE102009025481A patent/DE102009025481A1/de not_active Ceased
- 2009-07-06 US US12/497,963 patent/US8225657B2/en not_active Expired - Fee Related
- 2009-07-07 JP JP2009161153A patent/JP5449889B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03228542A (ja) * | 1990-01-31 | 1991-10-09 | Okuma Mach Works Ltd | 工具のアンバランスのチェック方法及び除去方法 |
| US5543698A (en) * | 1994-09-27 | 1996-08-06 | Allen-Bradley Company, Inc. | Method and apparatus used with AC motor for detecting unbalance |
| JPH1043987A (ja) * | 1996-07-31 | 1998-02-17 | Nippei Toyama Corp | 静圧軸受に支持される回転軸のバランス修正方法 |
| JP2001129743A (ja) * | 1999-08-20 | 2001-05-15 | Disco Abrasive Syst Ltd | 切削装置の回転バランス調整機構 |
| JP2008043637A (ja) * | 2006-08-21 | 2008-02-28 | Samsung Electronics Co Ltd | 回転体制御装置及びこれを備える洗濯機 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105738033A (zh) * | 2016-03-22 | 2016-07-06 | 郭卫建 | 转子的不平衡量的获取方法 |
| CN105738033B (zh) * | 2016-03-22 | 2019-02-01 | 郭卫建 | 转子的不平衡量的获取方法 |
| KR20190006377A (ko) * | 2017-07-10 | 2019-01-18 | 정윤석 | 시앤시 가공시간 예측 디지털 경광등 |
| KR102012341B1 (ko) * | 2017-07-10 | 2019-08-20 | 정윤석 | 시앤시 가공시간 예측 디지털 경광등 |
| JPWO2024127624A1 (ja) * | 2022-12-16 | 2024-06-20 | ||
| WO2024127624A1 (ja) * | 2022-12-16 | 2024-06-20 | Dmg森精機株式会社 | 芯ずれ検出方法及び芯ずれ検出装置、並びに芯ずれ検出装置を備えた工作機械 |
| JP7720492B2 (ja) | 2022-12-16 | 2025-08-07 | Dmg森精機株式会社 | 芯ずれ検出方法及び芯ずれ検出装置、並びに芯ずれ検出装置を備えた工作機械 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5449889B2 (ja) | 2014-03-19 |
| CN101625277B (zh) | 2011-07-27 |
| US20100000320A1 (en) | 2010-01-07 |
| US8225657B2 (en) | 2012-07-24 |
| DE102009025481A1 (de) | 2010-01-28 |
| CN101625277A (zh) | 2010-01-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5449889B2 (ja) | アンバランス状態を定量的に検出する方法および装置と工作物のクランプ状態を検出する方法 | |
| JP2010017842A5 (ja) | ||
| JP6496061B1 (ja) | 転がり軸受の異常診断方法及び異常診断装置 | |
| CN103115726B (zh) | 一种基于应变的旋转零部件动平衡方法 | |
| JP5056796B2 (ja) | 工作機械における主軸の動剛性測定装置及び動剛性測定方法 | |
| RU2711716C2 (ru) | Способ и устройство для динамической балансировки вращающегося тела | |
| CN110926702B (zh) | 动平衡校正方法及使用该方法的自动化设备 | |
| CN103105266B (zh) | 一种旋转机械转子双平面弯矩动平衡方法 | |
| US20030230142A1 (en) | Apparatus and method for testing rotational balance of crankshaft | |
| CN104101464A (zh) | 一种基于旋转坐标系的多轮盘转子动平衡检测方法 | |
| CN104330214B (zh) | 一种简易现场动平衡方法 | |
| CN100582710C (zh) | 轮胎不平衡量标定与测量方法 | |
| CN105136394B (zh) | 快速处理锅炉风机振动故障的方法及装置 | |
| JP2012247351A (ja) | タイヤバランス試験方法及びタイヤバランス試験機 | |
| JP2005308537A (ja) | 釣合い解析器及びこの釣合い解析器による釣合い解析方法 | |
| JP4098429B2 (ja) | 釣合い試験機及び釣合い試験方法 | |
| EP4484054A1 (en) | Device and method for correcting imbalance of machine tool rotary table | |
| JP2017156265A (ja) | 零点設定方法、評価装置およびプログラム | |
| CN111347284A (zh) | 一种车床轮毂加工中在线动平衡检调装置及检调方法 | |
| JP2005308538A (ja) | 釣合い試験機及びこの釣合い試験機による修正重りの計算処理方法 | |
| JPH02226032A (ja) | ポータブル型バランシング装置 | |
| CN217036984U (zh) | 马达 | |
| JP4019877B2 (ja) | 長軸状回転体のアンバランス測定方法及び測定装置 | |
| JP5198920B2 (ja) | 動釣合試験機 | |
| JPH04262219A (ja) | ダイナミックバランサーマシンにおけるアンバランス除去方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120420 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120420 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20120420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130702 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130920 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131225 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5449889 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |