JP2010016453A - 画像符号化装置および方法、画像復号装置および方法、並びにプログラム - Google Patents
画像符号化装置および方法、画像復号装置および方法、並びにプログラム Download PDFInfo
- Publication number
- JP2010016453A JP2010016453A JP2008172269A JP2008172269A JP2010016453A JP 2010016453 A JP2010016453 A JP 2010016453A JP 2008172269 A JP2008172269 A JP 2008172269A JP 2008172269 A JP2008172269 A JP 2008172269A JP 2010016453 A JP2010016453 A JP 2010016453A
- Authority
- JP
- Japan
- Prior art keywords
- motion vector
- image
- prediction
- target block
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/132—Sampling, masking or truncation of coding units, e.g. adaptive resampling, frame skipping, frame interpolation or high-frequency transform coefficient masking
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/523—Motion estimation or motion compensation with sub-pixel accuracy
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/57—Motion estimation characterised by a search window with variable size or shape
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
Abstract
【課題】圧縮効率の低下を抑制する。
【解決手段】テンプレート動き予測・補償部76は、画面並べ替えバッファ62から読み出されたインター符号化が行われる画像と、スイッチ73を介してフレームメモリ72から供給される参照画像に基づいて、インターテンプレート予測モードの整数画素単位の動き予測と補償処理を行う。小数画素精度動き予測・補償部77は、画面並べ替えバッファ62から読み出されたインター符号化が行われる画像と、スイッチ73を介してフレームメモリ72から供給される参照画像に基づいて、インターテンプレート予測モードの小数画素単位の動き予測と補償処理を行う。本発明は、例えば、H.264/AVC方式で符号化する画像符号化装置に適用することができる。
【選択図】図1
【解決手段】テンプレート動き予測・補償部76は、画面並べ替えバッファ62から読み出されたインター符号化が行われる画像と、スイッチ73を介してフレームメモリ72から供給される参照画像に基づいて、インターテンプレート予測モードの整数画素単位の動き予測と補償処理を行う。小数画素精度動き予測・補償部77は、画面並べ替えバッファ62から読み出されたインター符号化が行われる画像と、スイッチ73を介してフレームメモリ72から供給される参照画像に基づいて、インターテンプレート予測モードの小数画素単位の動き予測と補償処理を行う。本発明は、例えば、H.264/AVC方式で符号化する画像符号化装置に適用することができる。
【選択図】図1
Description
本発明は画像符号化装置および方法、画像復号装置および方法、並びにプログラムに関し、特に、圧縮効率の低下を抑制するようにした画像符号化装置および方法、画像復号装置および方法、並びにプログラムに関する。
近年、MPEG(Moving Picture Experts Group)2やH.264およびMPEG−4 Part10 (Advanced Video Coding)(以下H.264/AVCと記す)などの方式で画像を圧縮符号化し、パケット化して伝送し、受信側で復号する技術が普及してきた。これによりユーザは高品質の動画像を視聴することができる。
ところで、MPEG2方式においては、線形内挿処理により1/2画素精度の動き予測・補償処理が行われているが、H.264/AVC方式においては、6タップのFIR (Finite Impulse Response Filter)フィルタを用いた1/4画素精度の予測・補償処理が行われている。
また、MPEG2方式においては、フレーム動き補償モードの場合には、16×16画素を単位として動き予測・補償処理が行われ、フィールド動き補償モードの場合には、第1フィールドと第2フィールドのそれぞれに対し、16×8画素を単位として動き予測・補償処理が行われている。
これに対して、H.264/AVC方式においては、ブロックサイズを可変にして、動き予測・補償を行うことができる。すなわち、H.264/AVC方式においては、16×16画素で構成される1つのマクロブロックを、16×16、16×8、8×16、あるいは8×8のいずれかのパーティションに分割して、それぞれ独立した動きベクトル情報を持つことが可能である。また、8×8パーティションに関しては、8×8、8×4、4×8、あるいは4×4のいずれかのサブパーティションに分割し、それぞれ独立した動きベクトル情報を持つことが可能である。
しかしながら、H.264/AVC方式においては、上述した1/4画素精度、およびブロック可変の動き予測・補償処理が行われることにより、膨大な動きベクトル情報が生成されてしまい、これをこのまま符号化してしまうと、符号化効率の低下を招いていた。
そこで、符号化対象の画像の領域に対して所定の位置関係で隣接すると共に復号画像の一部であるテンプレート領域の復号画像と相関が高い画像の領域を、復号画像から探索して、探索された領域と所定の位置関係とに基づいて予測を行う方法が提案されている(特許文献1参照)。
この方法は、マッチングに復号画像を用いているため、探索範囲を予め定めておくことで、符号化装置と復号装置において同一の処理を行うことが可能である。すなわち、復号装置においても上述したような予測・補償処理を行うことにより、符号化装置からの画像圧縮情報の中に動きベクトル情報を持つ必要がないため、符号化効率の低下を抑えることが可能である。
しかしながら、特許文献1の技術を、小数画素精度の予測・補償処理に適用すると、符号化対象の画像の領域の画素値を用いていないことや、マッチングに用いる画素値が少ないことなどの理由により、予測性能(残差)が低下してしまい、その結果、動きベクトルを持つ必要がないにも関わらず、符号化効率の低下を招いてしまう恐れがあった。
本発明は、このような状況に鑑みてなされたものであり、圧縮効率の低下を抑制するものである。
本発明の一側面の画像符号化装置は、フレームの第1の対象ブロックの整数画素精度の動きベクトルを、前記第1の対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して探索する第1の動き予測補償部と、前記第1の対象ブロックの小数画素精度の動きベクトルを、前記第1の対象ブロックを利用して探索する第2の動き予測補償部と、前記第1の対象ブロックに対する動きベクトルの情報として、前記第2の動き予測補償部により探索された前記小数画素精度の動きベクトルの情報を符号化する符号化部とを備える。
前記第2の動き予測補償部は、符号化済みのブロックであって、前記第1の対象ブロックに隣接するブロックである隣接ブロックに対する動きベクトルの情報を用いて前記小数画素精度の動きベクトルの予測値を生成し、前記符号化部は、前記第1の対象ブロックに対する動きベクトルの情報として、前記小数画素精度の動きベクトルの情報と前記予測値との差分を符号化することができる。
前記第2の動き予測補償部は、符号化済みのブロックであって、前記第1の対象ブロックに隣接するブロックである隣接ブロックに対する動きベクトルの情報、前記フレームと異なる符号化済みフレームのブロックであって、前記第1の対象ブロックに対応する位置のブロックである対応ブロックと前記対応ブロックに隣接するブロックに対する動きベクトルの情報、または、前記対応ブロックと前記隣接ブロックに対する動きベクトルの情報を用いて前記小数画素精度の動きベクトルの予測値を生成し、前記符号化部は、前記第1の対象ブロックに対する動きベクトルの情報として、前記小数画素精度の動きベクトルの情報と前記予測値との差分を符号化することができる。
前記符号化部は、前記第1の対象ブロックの大きさが16×16画素であり、前記小数画素精度の動きベクトルの予測値が0であり、かつ、全ての直交変換係数が0である場合、前記第1の対象ブロックに対する動きベクトルの情報として、前記第1の対象ブロックがテンプレートスキップブロックであることを表すフラグのみを符号化することができる。
前記フレームの第2の対象ブロックの動きベクトルを、前記第2の対象ブロックを利用して探索する第3の動き予測補償部と、前記第1または第2の動き予測補償部により探索された前記動きベクトルに基づく予測画像と、前記第3の動き予測補償部により探索された前記動きベクトルに基づく予測画像のうちの一方を選択する画像選択部とをさらに備えることができる。
前記符号化部は、算術符号化を行う場合、前記第1および第2の動き予測補償部が対象とする前記第1の対象ブロックに対する第1のコンテクスト、および前記第3の動き予測補償部が対象とする前記第2の対象ブロックに対する第2のコンテクストをそれぞれ定義し、前記第1の対象ブロックに対する動きベクトルの情報を前記第1のコンテクストを用いて符号化し、前記第2の対象ブロックに対する動きベクトルの情報を前記第2のコンテクストを用いて符号化することができる。
前記符号化部は、算術符号化を行う場合、1つのコンテクストを定義し、前記第1の対象ブロックに対する動きベクトルの情報および前記第2の対象ブロックに対する動きベクトルの情報を前記コンテクストを用いて符号化することができる。
前記符号化部は、算術符号化を行う場合、整数画素精度の動きベクトルの情報に対する第1のコンテクストと、小数画素精度の動きベクトルの情報に対する第2のコンテクストをそれぞれ定義し、前記第1の対象ブロックに対する動きベクトルの情報のうち、前記小数画素精度の動きベクトルの情報を前記第2のコンテクストを用いて符号化し、前記第2の対象ブロックに対する動きベクトルの情報のうち、前記整数画素精度の動きベクトルの情報を前記第1のコンテクストを用いて符号化し、前記小数画素精度の動きベクトルの情報を前記第2のコンテクストを用いて符号化することができる。
本発明の一側面の画像符号化方法は、画像符号化装置が、フレームの対象ブロックの整数画素精度の動きベクトルを、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して探索し、前記対象ブロックの小数画素精度の動きベクトルを、前記対象ブロックを利用して探索し、前記対象ブロックに対する動きベクトルの情報として、探索された前記小数画素精度の動きベクトルの情報を符号化するステップを含む。
本発明の一側面のプログラムは、フレームの対象ブロックの整数画素精度の動きベクトルを、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して探索し、前記対象ブロックの小数画素精度の動きベクトルを、前記対象ブロックを利用して探索し、前記対象ブロックに対する動きベクトルの情報として、探索された前記小数画素精度の動きベクトルの情報を符号化するステップを含む処理をコンピュータに実行させる。
本発明の一側面においては、フレームの対象ブロックの整数画素精度の動きベクトルが、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して探索され、前記対象ブロックの小数画素精度の動きベクトルが、前記対象ブロックを利用して探索される。そして、前記対象ブロックに対する動きベクトルの情報として、探索された前記小数画素精度の動きベクトルの情報が符号化される。
本発明の他の側面の画像復号装置は、符号化された動きベクトルの情報を復号する復号部と、フレームの第1の対象ブロックの整数画素精度について、前記第1の対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して動きベクトルを探索することで、整数画素精度の予測画像を生成する第1の動き予測補償部と、前記復号部により復号された前記第1の対象ブロックの小数画素精度の動きベクトルの情報を用いて、小数画素精度の予測画像を生成する第2の動き予測補償部とを備える。
本発明の他の側面の画像復号方法は、画像復号装置が、符号化された動きベクトルの情報を復号し、フレームの対象ブロックの整数画素精度について、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して動きベクトルを探索することで、整数画素精度の予測画像を生成し、復号された前記対象ブロックの小数画素精度の動きベクトルの情報を用いて、小数画素精度の予測画像を生成するステップを含む。
本発明の他の側面のプログラムは、符号化された動きベクトルの情報を復号し、フレームの対象ブロックの整数画素精度について、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して動きベクトルを探索することで、整数画素精度の予測画像を生成し、復号された前記対象ブロックの小数画素精度の動きベクトルの情報を用いて、小数画素精度の予測画像を生成するステップを含む処理をコンピュータに実行させる。
本発明の他の側面においては、符号化された動きベクトルの情報が復号される。そして、フレームの対象ブロックの整数画素精度について、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して動きベクトルを探索することで、整数画素精度の予測画像が生成され、復号された前記対象ブロックの小数画素精度の動きベクトルの情報を用いて、小数画素精度の予測画像が生成される。
以上のように、本発明の一側面によれば、画像を符号化することができる。また、本発明の一側面によれば、圧縮効率の低下を抑制することができる。
本発明の他の側面によれば、画像を復号することができる。また、本発明の他の側面によれば、圧縮効率の低下を抑制することができる。
以下、図を参照して本発明の実施の形態について説明する。
図1は、本発明の画像符号化装置の一実施の形態の構成を表している。この画像符号化装置51は、A/D変換部61、画面並べ替えバッファ62、演算部63、直交変換部64、量子化部65、可逆符号化部66、蓄積バッファ67、逆量子化部68、逆直交変換部69、演算部70、デブロックフィルタ71、フレームメモリ72、スイッチ73、イントラ予測部74、動き予測・補償部75、テンプレート動き予測・補償部76、小数画素精度動き予測・補償部77、予測画像選択部78、およびレート制御部79により構成されている。
この画像符号化装置51は、例えば、H.264およびMPEG−4 Part10 (Advanced Video Coding)(以下H.264/AVCと記す)方式で画像を圧縮符号化する。
H.264/AVC方式においては、ブロックサイズを可変にして、動き予測・補償が行われる。すなわち、H.264/AVC方式においては、16×16画素で構成される1つのマクロブロックを、図2に示されるように、16×16画素、16×8画素、8×16画素、あるいは8×8画素のいずれかのパーティションに分割して、それぞれ独立した動きベクトル情報を持つことが可能である。また、8×8画素のパーティションに関しては、図2に示されるように、8×8画素、8×4画素、4×8画素、あるいは4×4画素のいずれかのサブパーティションに分割し、それぞれ独立した動きベクトル情報を持つことが可能である。
また、H.264/AVC方式においては、6タップのFIR (Finite Impulse Response Filter)フィルタを用いた1/4画素精度の予測・補償処理が行われている。図3を参照して、H.264/AVC方式における小数画素精度の予測・補償処理について説明する。
図3の例において、位置Aは、整数精度画素の位置、位置b,c,dは、1/2画素精度の位置、位置e1,e2,e3は、1/4画素精度の位置を示している。まず、以下においては、Clip()を次の式(1)のように定義する。

位置bおよびdにおける画素値は、6タップのFIRフィルタを用いて、次の式(2)のように生成される。
位置cにおける画素値は、水平方向および垂直方向に6タップのFIRフィルタを適用し、次の式(3)のように生成される。
なお、Clip処理は、水平方向および垂直方向の積和処理の両方を行った後、最後に1度のみ実行される。
位置e1乃至e3は、次の式(4)のように線形内挿により生成される。
図1に戻って、A/D変換部61は、入力された画像をA/D変換し、画面並べ替えバッファ62に出力し、記憶させる。画面並べ替えバッファ62は、記憶した表示の順番のフレームの画像を、GOP(Group of Picture)に応じて、符号化のためのフレームの順番に並べ替える。
演算部63は、画面並べ替えバッファ62から読み出された画像から、予測画像選択部78により選択されたイントラ予測部74からの予測画像または動き予測・補償部75からの予測画像を減算し、その差分情報を直交変換部64に出力する。直交変換部64は、演算部63からの差分情報に対して、離散コサイン変換、カルーネン・レーベ変換等の直交変換を施し、その変換係数を出力する。量子化部65は直交変換部64が出力する変換係数を量子化する。
量子化部65の出力となる、量子化された変換係数は、可逆符号化部66に入力され、ここで可変長符号化、算術符号化等の可逆符号化が施され、圧縮される。
可逆符号化部66は、イントラ予測に関する情報をイントラ予測部74から取得し、インター予測やインターテンプレート予測に関する情報などを動き予測・補償部75から取得する。可逆符号化部66は、量子化された変換係数を符号化するとともに、イントラ予測に関する情報、インター予測やインターテンプレート予測に関する情報などを符号化し、圧縮画像におけるヘッダ情報の一部とする。可逆符号化部66は、符号化したデータを蓄積バッファ67に供給して蓄積させる。
例えば、可逆符号化部66においては、H.264/AVC方式で定められているCAVLC(Context-Adaptive Variable Length Coding)などの可変長符号化、または、CABAC(Context-Adaptive Binary Arithmetic Coding)などの算術符号化等の可逆符号化処理が行われる。ここで、CABAC 符号化方式について説明する。
図4は、CABAC 符号化を行う可逆符号化部66の構成例を表している。図4の例において、可逆符号化部66は、コンテクストモデル化部91、2値化部92、並びに、確率推定部94および符号化エンジン95からなる適応2値算術符号化部93により構成されている。
コンテクストモデル化部91は、圧縮画像における任意のシンタクス要素に関して、まず、過去の履歴に応じて、シンタクス要素のシンボル(記号)を適切なコンテクストモデルに変換する。CABAC 符号化においては、異なるシンタクス要素は、異なるコンテクストにより符号化がなされる。また、同じシンタクス要素であっても、周辺ブロックまたはマクロブロックにおける符号化情報に応じて異なるコンテクストにより符号化がなされる。
図5を参照して、フラグmb_skip_fragを例にとって説明するが、他のシンタクス要素に対する処理についても同様である。
図5の例において、これから符号化される対象マクロブロックCと、既に符号化済みのブロックであり、対象マクロブロックCに隣接する隣接マクロブロックAおよびBが示されている。それぞれのマクロブロックX(X=A,B,C)に対して、フラグmb_skip_fragが定義されており、次の式(5)であるとする。
すなわち、マクロブロックXが、参照フレームの空間的に対応する位置の画素をそのまま用いるスキップトマクロブロックである場合、f(X)は1とされ、そうでない場合、0とされる。
このとき、対象マクロブロックCに対するコンテクストContext(C)は、次の式(6)のように、左の隣接マクロブロックAのf(A)と上の隣接マクロブロックBのf(B)の和として算出される。
Context(C) = f(A) + f(B) ・・・(6)
Context(C) = f(A) + f(B) ・・・(6)
すなわち、対象マクロブロックCに対するコンテクストContext(C)は、隣接マクロブロックA,Bのフラグmb_skip_fragに応じて、0,1,2のいずれかの値をとることになる。対象マクロブロックCに対するフラグmb_skip_fragは、0,1,2のいずれかの符号化エンジン95が用いられて符号化されることになる。
2値化部92は、例えば、イントラ予測モードのように、シンタクス上、非2値化データである要素のシンボルを、図6に示されるテーブルに基づいて変換する。
図6のテーブルにおいては、コードシンボルが0の場合、0に2値化され、コードシンボルが1の場合、10に2値化され、コードシンボルが2の場合、110に2値化されることが示されている。また、コードシンボルが3の場合、1110に2値化され、コードシンボルが4の場合、11110に2値化され、コードシンボルが5の場合、111110に2値化されることが示されている。
ただし、マクロブロックタイプに関してはこのテーブルではなく、別途定義されたテーブルに基づいて2値化処理が行われる。
以上のようにして2値化されたシンタクス要素は、後段の適応2値算術符号化部93により符号化される。
適応2値算術符号化部93においては、2値化されたシンボルに対して、確率推定部94によって確率推定がなされ、符号化エンジン95によって確率推定に基づく適応算術符号化が施される。その際、“0”“1”の確率は、スライス先頭で初期化され、1Binの符号化が行われる毎にその確率テーブルが更新される。すなわち、適応算術符号化処理が行われた後、関連するモデルの更新が行われるため、それぞれのモデルは実際の画像圧縮情報の統計に応じた符号化処理を行うことが可能となる。
図1に戻って、蓄積バッファ67は、可逆符号化部66から供給されたデータを、H.264/AVC方式で符号化された圧縮画像として、例えば、後段の図示せぬ記録装置や伝送路などに出力する。レート制御部79は、蓄積バッファ67に蓄積された圧縮画像に基づいて、量子化部65の量子化動作を制御する。
また、量子化部65より出力された、量子化された変換係数は、逆量子化部68にも入力され、逆量子化された後、さらに逆直交変換部69において逆直交変換される。逆直交変換された出力は演算部70により予測画像選択部78から供給される予測画像と加算されて、局部的に復号された画像となる。デブロックフィルタ71は、復号された画像のブロック歪を除去した後、フレームメモリ72に供給し、蓄積させる。フレームメモリ72には、デブロックフィルタ71によりデブロックフィルタ処理される前の画像も供給され、蓄積される。
スイッチ73はフレームメモリ72に蓄積された参照画像を動き予測・補償部75またはイントラ予測部74に出力する。
この画像符号化装置51においては、例えば、画面並べ替えバッファ62からのIピクチャ、Bピクチャ、およびPピクチャが、イントラ予測(イントラ処理とも称する)する画像として、イントラ予測部74に供給される。また、画面並べ替えバッファ62から読み出されたBピクチャおよびPピクチャが、インター予測(インター処理とも称する)する画像として、動き予測・補償部77に供給される。
イントラ予測部74は、画面並べ替えバッファ62から読み出されたイントラ予測する画像とフレームメモリ72から供給された参照画像に基づいて、候補となる全てのイントラ予測モードのイントラ予測処理を行い、予測画像を生成する。
その際、イントラ予測部74は、候補となる全てのイントラ予測モードに対してコスト関数値を算出し、算出したコスト関数値が最小値を与えるイントラ予測モードを、最適イントラ予測モードとして選択する。
イントラ予測部74は、最適イントラ予測モードで生成された予測画像とそのコスト関数を、予測画像選択部78に供給する。イントラ予測部74は、予測画像選択部78により最適イントラ予測モードで生成された予測画像が選択された場合、最適イントラ予測モードに関する情報を、可逆符号化部66に供給する。可逆符号化部66は、この情報を符号化し、圧縮画像におけるヘッダ情報の一部とする。
動き予測・補償部75は、候補となる全てのインター予測モードの動き予測・補償処理を行う。すなわち、動き予測・補償部75は、画面並べ替えバッファ62から読み出されたインター処理する画像と、スイッチ73を介してフレームメモリ72から供給される参照画像に基づいて、候補となる全てのインター予測モードの動きベクトルを検出し、動きベクトルに基づいて参照画像に動き予測と補償処理を施し、予測画像を生成する。
また、動き予測・補償部75は、画面並べ替えバッファ62から読み出されたインター処理される画像と、スイッチ73を介してフレームメモリ72から供給される参照画像を、テンプレート動き予測・補償部76に供給する。
さらに、動き予測・補償部75は、候補となる全てのインター予測モードに対してコスト関数値を算出する。動き予測・補償部75は、算出したインター予測モードに対してのコスト関数値と、テンプレート動き予測・補償部76により算出されたインターテンプレート予測モードに対してのコスト関数値のうち、最小値を与える予測モードを、最適インター予測モードとして決定する。
動き予測・補償部75は、最適インター予測モードで生成された予測画像とそのコスト関数を、予測画像選択部78に供給する。動き予測・補償部75は、予測画像選択部78により最適インター予測モードで生成された予測画像が選択された場合、最適インター予測モードに関する情報、およびその最適インター予測モードに応じた情報(動きベクトル情報、フラグ情報、参照フレーム情報など)を可逆符号化部66に出力する。可逆符号化部66は、動き予測・補償部75からの情報をやはり可変長符号化、算術符号化といった可逆符号化処理し、圧縮画像のヘッダ部に挿入する。
テンプレート動き予測・補償部76と小数画素精度動き予測・補償部77は、インターテンプレート予測モードの動き予測・補償処理を行う。テンプレート動き予測・補償部76は、インターテンプレート予測モードのうち、整数画素単位の動き予測と補償処理を行い、小数画素精度動き予測・補償部77は、小数画素単位の動き予測と補償処理を行う。
すなわち、テンプレート動き予測・補償部76は、画面並べ替えバッファ62から読み出されたインター処理される画像と、スイッチ73を介してフレームメモリ72から供給される参照画像に基づいて、インターテンプレート予測モードの整数画素単位の動き予測と補償処理を行い、予測画像を生成する。
また、テンプレート動き予測・補償部76は、画面並べ替えバッファ62から読み出されたインター符号化が行われる画像と、スイッチ73を介してフレームメモリ72から供給される参照画像を、小数画素精度動き予測・補償部77に供給する。
テンプレート動き予測・補償部76は、インターテンプレート予測モードに対してコスト関数値を算出し、算出したコスト関数値と予測画像を、動き予測・補償部75に供給する。インターテンプレート予測モードに応じた情報(例えば、動きベクトル情報やフラグ情報など)がある場合には、それも動き予測・補償部75に供給される。
小数画素精度動き予測・補償部77は、画面並べ替えバッファ62から読み出されたインター処理される画像と、スイッチ73を介してフレームメモリ72から供給される参照画像に基づいて、インターテンプレート予測モードの小数画素単位の動き予測と補償処理を行い、予測画像を生成する。小数画素精度動き予測・補償部77は、生成した予測画像と、動きベクトル情報またはフラグ情報などを、テンプレート動き予測・補償部76に供給する。
予測画像選択部78は、イントラ予測部74または動き予測・補償部75より出力された各コスト関数値に基づいて、最適イントラ予測モードと最適インター予測モードから、最適予測モードを決定し、決定された最適予測モードの予測画像を選択し、演算部63,70に供給する。このとき、予測画像選択部78は、予測画像の選択情報を、イントラ予測部74または動き予測・補償部75に供給する。
レート制御部79は、蓄積バッファ67に蓄積された圧縮画像に基づいて、オーバーフローあるいはアンダーフローが発生しないように、量子化部65の量子化動作のレートを制御する。
次に、図7のフローチャートを参照して、図1の画像符号化装置51の符号化処理について説明する。
ステップS11において、A/D変換部61は入力された画像をA/D変換する。ステップS12において、画面並べ替えバッファ62は、A/D変換部61より供給された画像を記憶し、各ピクチャの表示する順番から符号化する順番への並べ替えを行う。
ステップS13において、演算部63は、ステップS12で並び替えられた画像と予測画像との差分を演算する。予測画像は、インター予測する場合は動き予測・補償部75から、イントラ予測する場合はイントラ予測部74から、それぞれ予測画像選択部78を介して演算部63に供給される。
差分データは元の画像データに較べてデータ量が小さくなっている。したがって、画像をそのまま符号化する場合に較べて、データ量を圧縮することができる。
ステップS14において、直交変換部64は演算部63から供給された差分情報を直交変換する。具体的には、離散コサイン変換、カルーネン・レーベ変換等の直交変換が行われ、変換係数が出力される。ステップS15において、量子化部65は変換係数を量子化する。この量子化に際しては、後述するステップS25の処理で説明されるように、レートが制御される。
以上のようにして量子化された差分情報は、次のようにして局部的に復号される。すなわち、ステップS16において、逆量子化部68は量子化部65により量子化された変換係数を量子化部65の特性に対応する特性で逆量子化する。ステップS17において、逆直交変換部69は逆量子化部68により逆量子化された変換係数を直交変換部64の特性に対応する特性で逆直交変換する。
ステップS18において、演算部70は、予測画像選択部78を介して入力される予測画像を局部的に復号された差分情報に加算し、局部的に復号された画像(演算部63への入力に対応する画像)を生成する。ステップS19においてデブロックフィルタ71は、演算部70より出力された画像をフィルタリングする。これによりブロック歪みが除去される。ステップS20においてフレームメモリ72は、フィルタリングされた画像を記憶する。なお、フレームメモリ72にはデブロックフィルタ71によりフィルタ処理されていない画像も演算部70から供給され、記憶される。
ステップS21において、イントラ予測部74、動き予測・補償部75、テンプレート動き予測・補償部76、および小数画素精度動き予測・補償部77は、それぞれ画像の予測処理を行う。すなわち、ステップS21において、イントラ予測部74は、イントラ予測モードのイントラ予測処理を行い、動き予測・補償部75は、インター予測モードの動き予測・補償処理を行う。また、テンプレート動き予測・補償部76および小数画素精度動き予測・補償部77は、インターテンプレート予測モードの動き予測・補償処理を行う。
ステップS21における予測処理の詳細は、図8を参照して後述するが、この処理により、候補となる全ての予測モードでの予測処理がそれぞれ行われ、候補となる全ての予測モードでのコスト関数がそれぞれ算出される。そして、算出されたコスト関数値に基づいて、最適イントラ予測モードが選択され、最適イントラ予測モードのイントラ予測により生成された予測画像とそのコスト関数が予測画像選択部78に供給される。また、算出されたコスト関数に基づいて、インター予測モードとインターテンプレート予測モードの中から、最適インター予測モードが決定され、最適インター予測モードで生成された予測画像とそのコスト関数が、予測画像選択部78に供給される。
ステップS22において、予測画像選択部78は、イントラ予測部74および動き予測・補償部75より出力された各コスト関数値に基づいて、最適イントラ予測モードと最適インター予測モードのうちの一方を、最適予測モードに決定し、決定された最適予測モードの予測画像を選択し、演算部63,70に供給する。この予測画像が、上述したように、ステップS13,S18の演算に利用される。
なお、この予測画像の選択情報は、イントラ予測部74または動き予測・補償部75に供給される。最適イントラ予測モードの予測画像が選択された場合、イントラ予測部74は、最適イントラ予測モードに関する情報(すなわち、イントラ予測モード情報)を、可逆符号化部66に供給する。
最適インター予測モードの予測画像が選択された場合、動き予測・補償部75は、最適インター予測モードに関する情報、およびその最適インター予測モードに応じた情報(動きベクトル情報やフラグ情報、参照フレーム情報など)を可逆符号化部66に出力する。さらに具体的には、最適インター予測モードとして、インター予測モードによる予測画像が選択されているときには、動き予測・補償部75は、インター予測モード情報、動きベクトル情報、参照フレーム情報を可逆符号化部66に出力する。
一方、最適インター予測モードとして、インターテンプレート予測モードによる予測画像が選択されているときには、動き予測・補償部75は、インターテンプレート予測モード情報、動きベクトル情報、小数画素単位の動きベクトル情報を可逆符号化部66に出力する。なお、その際、対象ブロックがテンプレートスキップであると判定されているときには、小数画素単位の動きベクトル情報の代わりに、図17を参照して後述するテンプレートマッチングスキップであることを表すフラグ情報(TM_skip_frag=1)が出力される。
ステップS23において、可逆符号化部66は量子化部65より出力された量子化された変換係数を符号化する。すなわち、差分画像が可変長符号化、算術符号化等の可逆符号化され、圧縮される。このとき、上述したステップS22において可逆符号化部66に入力された、イントラ予測部74からのイントラ予測モード情報、または、動き予測・補償部75からの最適インター予測モードに応じた情報(予測モード情報、動きベクトル情報や参照フレーム情報など)なども符号化され、ヘッダ情報に付加される。
なお、動き予測・補償部75からテンプレートマッチングスキップであることを表すフラグ情報が出力された場合には、フラグ情報のみが符号化される。すなわち、変換係数も符号化されない。
ここで、可逆符号化部66において、可逆符号化方式が、図4を参照して上述したCABACに基づく場合、インターテンプレート予測モードの対象ブロックにおけるコンテクストを、インター予測モードおよびイントラ予測モードに対して定義されたコンテクストとは別に定義することもできるし、インター予測モードおよびイントラ予測モードと同じコンテクストを用いることもできる。
さらに、整数画素精度動きベクトル情報用と、小数画素精度動きベクトル情報用に別々のコンテクストを定義し、それを用いて符号化することもできる。
すなわち、この場合、インター予測モードの予測処理で求められた動きベクトルのうち、整数画素精度の動きベクトル情報は、整数画素精度動きベクトル情報用のコンテクストで符号化される。一方、インター予測モードの予測処理で求められた動きベクトルのうち、小数画素精度の動きベクトル情報と、インターテンプレート予測モードの予測処理で探索された小数画素精度の動きベクトル情報は、小数画素精度動きベクトル情報用のコンテクストで符号化される。
ステップS24において蓄積バッファ67は差分画像を圧縮画像として蓄積する。蓄積バッファ67に蓄積された圧縮画像が適宜読み出され、伝送路を介して復号側に伝送される。
ステップS25においてレート制御部79は、蓄積バッファ67に蓄積された圧縮画像に基づいて、オーバーフローあるいはアンダーフローが発生しないように、量子化部65の量子化動作のレートを制御する。
次に、図8のフローチャートを参照して、図7のステップS21における予測処理を説明する。
画面並べ替えバッファ62から供給される処理対象の画像がイントラ処理されるブロックの画像である場合、参照される復号済みの画像がフレームメモリ72から読み出され、スイッチ73を介してイントラ予測部74に供給される。これらの画像に基づいて、ステップS31において、イントラ予測部74は処理対象のブロックの画素を、候補となる全てのイントラ予測モードでイントラ予測する。なお、参照される復号済みの画素としては、デブロックフィルタ71によりデブロックフィルタリングされていない画素が用いられる。
ステップS31におけるイントラ予測処理の詳細は、図9を参照して後述するが、この処理により、候補となる全てのイントラ予測モードでイントラ予測が行われ、候補となる全てのイントラ予測モードに対してコスト関数値が算出される。そして、算出されたコスト関数値に基づいて、最適イントラ予測モードが選択され、最適イントラ予測モードのイントラ予測により生成された予測画像とそのコスト関数が予測画像選択部78に供給される。
画面並べ替えバッファ62から供給される処理対象の画像がインター処理される画像である場合、参照される画像がフレームメモリ72から読み出され、スイッチ73を介して動き予測・補償部75に供給される。これらの画像に基づいて、ステップS32において、動き予測・補償部75はインター動き予測処理を行う。すなわち、動き予測・補償部75は、フレームメモリ72から供給される画像を参照して、候補となる全てのインター予測モードの動き予測処理を行う。
ステップS32におけるインター動き予測処理の詳細は、図12を参照して後述するが、この処理により、候補となる全てのインター予測モードで動き予測処理が行われ、候補となる全てのインター予測モードに対してコスト関数値が算出される。
また、画面並べ替えバッファ62から供給される処理対象の画像がインター処理される画像である場合、参照される画像がフレームメモリ72から読み出され、スイッチ73および動き予測・補償部75を介してテンプレート動き予測・補償部76にも供給される。これらの画像に基づいて、テンプレート動き予測・補償部76および小数画素精度動き予測・補償部77は、ステップS33において、インターテンプレート予測モードで、インターテンプレート動き予測処理を行う。
ステップS33におけるインターテンプレート動き予測処理の詳細は、図15を参照して後述するが、この処理により、インターテンプレート予測モードで動き予測処理が行われ、インターテンプレート予測モードに対してコスト関数値が算出される。そして、インターテンプレート予測モードの動き予測処理により生成された予測画像とそのコスト関数が動き予測・補償部75に供給される。なお、インターテンプレート予測モードに応じた情報(例えば、動きベクトル情報や、フラグ情報など)がある場合には、それも動き予測・補償部75に供給される。
ステップS34において、動き予測・補償部75は、ステップS32において算出されたインター予測モードに対してコスト関数値と、ステップS33において算出されたインターテンプレート予測モードに対してのコスト関数値を比較し、最小値を与える予測モードを、最適インター予測モードとして決定する。そして、動き予測・補償部75は、最適インター予測モードで生成された予測画像とそのコスト関数を、予測画像選択部78に供給する。
次に、図9のフローチャートを参照して、図8のステップS31におけるイントラ予測処理を説明する。なお、図9の例においては、輝度信号の場合を例として説明する。
イントラ予測部74は、ステップS41において、4×4画素、8×8画素、および16×16画素の各イントラ予測モードに対してイントラ予測を行う。
輝度信号のイントラ予測モードには、9種類の4×4画素および8×8画素のブロック単位、並びに4種類の16×16画素のマクロブロック単位の予測モードがあり、色差信号のイントラ予測モードには、4種類の8×8画素のブロック単位の予測モードがある。色差信号のイントラ予測モードは、輝度信号のイントラ予測モードと独立に設定が可能である。輝度信号の4×4画素および8×8画素のイントラ予測モードについては、4×4画素および8×8画素の輝度信号のブロック毎に1つのイントラ予測モードが定義される。輝度信号の16×16画素のイントラ予測モードと色差信号のイントラ予測モードについては、1つのマクロブロックに対して1つの予測モードが定義される。
予測モードの種類は、図10の番号0,1,3乃至8で示される方向に対応している。予測モード2は平均値予測である。
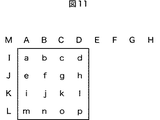
例えば、イントラ4×4予測モードの場合について、図11を参照して説明する。画面並べ替えバッファ62から読み出された処理対象の画像(例えば、画素a乃至p)がイントラ処理されるブロックの画像である場合、参照される復号済みの画像(画素A乃至M)がフレームメモリ72から読み出され、スイッチ73を介してイントラ予測部74に供給される。
これらの画像に基づいて、イントラ予測部74は、処理対象のブロックの画素をイントラ予測する。このイントラ予測処理が、各イントラ予測モードで行われることで、各イントラ予測モードでの予測画像が生成される。なお、参照される復号済みの画素(画素A乃至M)としては、デブロックフィルタ71によりデブロックフィルタリングされていない画素が用いられる。
イントラ予測部74は、ステップS42において、4×4画素、8×8画素、および16×16画素の各イントラ予測モードに対するコスト関数値を算出する。ここで、コスト関数値としては、H.264/AVC方式における参照ソフトウエアであるJM(Joint Model)で定められているように、High Complexity モードか、Low Complexity モードのいずれかの手法に基づいて行う。
すなわち、High Complexity モードにおいては、ステップS41の処理として、候補となる全ての予測モードに対して、仮に符号化処理までを行い、次の式(7)で表わされるコスト関数を各予測モードに対して算出し、その最小値を与える予測モードを最適予測モードであるとして選択する。
Cost(Mode) = D + λ・R ・・・(7)
Dは、原画像と復号画像の差分(歪)、Rは、直交変換係数まで含んだ発生符号量、λは、量子化パラメータQPの関数として与えられるラグランジュ乗数である。
Dは、原画像と復号画像の差分(歪)、Rは、直交変換係数まで含んだ発生符号量、λは、量子化パラメータQPの関数として与えられるラグランジュ乗数である。
一方、Low Complexity モードにおいては、ステップS41の処理として、候補となる全ての予測モードに対して、予測画像の生成、および、動きベクトル情報や予測モード情報、フラグ情報などのヘッダビットまでを算出し、次の式(8)で表わされるコスト関数を各予測モードに対して算出し、その最小値を与える予測モードを最適予測モードであるとして選択する。
Cost(Mode) = D + QPtoQuant(QP)・Header_Bit ・・・(8)
Dは、原画像と復号画像の差分(歪)、Header_Bitは、予測モードに対するヘッダビット、QPtoQuantは、量子化パラメータQPの関数として与えられる関数である。
Dは、原画像と復号画像の差分(歪)、Header_Bitは、予測モードに対するヘッダビット、QPtoQuantは、量子化パラメータQPの関数として与えられる関数である。
Low Complexity モードにおいては、全ての予測モードに対して、予測画像を生成するのみで、符号化処理および復号処理を行う必要がないため、演算量が少なくて済む。
イントラ予測部74は、ステップS43において、4×4画素、8×8画素、および16×16画素の各イントラ予測モードに対して、それぞれ最適モードを決定する。すなわち、図10を参照して上述したように、イントラ4×4予測モードおよびイントラ8×8予測モードの場合には、予測モードの種類が9種類あり、イントラ16×16予測モードの場合には、予測モードの種類が4種類ある。したがって、イントラ予測部74は、ステップS42において算出されたコスト関数に基づいて、それらの中から、最適イントラ4×4予測モード、最適イントラ8×8予測モード、最適イントラ16×16予測モードを決定する。
イントラ予測部74は、ステップS44において、4×4画素、8×8画素、および16×16画素の各イントラ予測モードに対して決定された各最適モードの中から、ステップS42において算出されたコスト関数に基づいて、最適イントラ予測モードを選択する。すなわち、4×4画素、8×8画素、および16×16画素に対して決定された各最適モードの中から、コスト関数が最小値であるモードを、最適イントラ予測モードとして選択する。そして、イントラ予測部74は、最適イントラ予測モードで生成された予測画像とそのコスト関数とを、予測画像選択部78に供給する。
次に、図12のフローチャートを参照して、図8のステップS32のインター動き予測処理について説明する。
動き予測・補償部75は、ステップS51において、図2を参照して上述した16×16画素乃至4×4画素からなる8種類の各インター予測モードに対して動きベクトルと参照画像をそれぞれ決定する。すなわち、各インター予測モードの処理対象のブロックについて、動きベクトルと参照画像がそれぞれ決定される。
動き予測・補償部75は、ステップS52において、16×16画素乃至4×4画素からなる8種類の各インター予測モードについて、ステップS51で決定された動きベクトルに基づいて、参照画像に動き予測と補償処理を行う。この動き予測と補償処理により、各インター予測モードでの予測画像が生成される。
動き予測・補償部75は、ステップS53において、16×16画素乃至4×4画素からなる8種類の各インター予測モードに対して決定された動きベクトルについて、圧縮画像に付加するための動きベクトル情報を生成する。
ここで、図13を参照して、H.264/AVC方式による動きベクトル情報の生成方法について説明する。図13の例において、これから符号化される対象ブロックE(例えば、16×16画素)と、既に符号化済みであり、対象ブロックEに隣接するブロックA乃至Dが示されている。
すなわち、ブロックDは、対象ブロックEの左上に隣接しており、ブロックBは、対象ブロックEの上に隣接しており、ブロックCは、対象ブロックEの右上に隣接しており、ブロックAは、対象ブロックEの左に隣接している。なお、ブロックA乃至Dが区切られていないのは、それぞれ、図2で上述した16×16画素乃至4×4画素のうちのいずれかの構成のブロックであることを表している。
例えば、X(=A,B,C,D,E)に対する動きベクトル情報を、mvXで表す。まず、対象ブロックEに対する予測動きベクトル情報pmvEは、ブロックA,B,Cに関する動きベクトル情報を用いて、メディアン予測により次の式(9)のように生成される。
pmvE = med(mvA,mvB,mvC) ・・・(9)
ブロックCに関する動きベクトル情報が、画枠の端であったり、あるいは、まだ符号化されていないなどの理由により、利用可能でない(unavailableである)場合には、ブロックCに関する動きベクトル情報は、ブロックDに関する動きベクトル情報で代用される。
ブロックCに関する動きベクトル情報が、画枠の端であったり、あるいは、まだ符号化されていないなどの理由により、利用可能でない(unavailableである)場合には、ブロックCに関する動きベクトル情報は、ブロックDに関する動きベクトル情報で代用される。
対象ブロックEに対する動きベクトル情報として、圧縮画像のヘッダ部に付加されるデータmvdEは、pmvEを用いて、次の式(10)のように生成される。
mvdE = mvE - pmvE ・・・(10)
mvdE = mvE - pmvE ・・・(10)
なお、実際には、動きベクトル情報の水平方向、垂直方向のそれぞれの成分に対して、独立に処理が行われる。
このように、予測動きベクトル情報を生成し、隣接するブロックとの相関で生成された予測動きベクトル情報と動きベクトル情報との差分を、圧縮画像のヘッダ部に付加することにより、動きベクトル情報を低減することができる。
以上のようにして生成された動きベクトル情報は、次のステップS54におけるコスト関数算出の際にも用いられ、最終的に予測画像選択部78により対応する予測画像が選択された場合には、予測モード情報および参照フレーム情報とともに、可逆符号化部66へ出力される。
また、予測動きベクトル情報の他の生成方法について、図14を参照して説明する。図14の例においては、符号化対象の対象フレームであるフレームNと、動きベクトルを探索する際に参照される参照フレームであるフレームN−1が示されている。
フレームNにおいて、これから符号化される対象ブロックには、対象ブロックに対する動きベクトル情報mv、既に符号化済みであり、対象ブロックに隣接する各ブロックには、各ブロックに対する動きベクトル情報mva,mvb,mvc,mvdがそれぞれ示されている。
具体的には、対象ブロックの左上に隣接するブロックには、そのブロックに対する動きベクトル情報mvd、対象ブロックの上に隣接するブロックには、そのブロックに対する動きベクトル情報mvbが示されている。対象ブロックの右上に隣接するブロックには、そのブロックに対する動きベクトル情報mvc、対象ブロックの左に隣接するブロックには、そのブロックに対する動きベクトル情報mvaが示されている。
フレームN−1において、対象ブロックの対応ブロック(co-located block)には、対応ブロックに対する動きベクトル情報mvcolが示されている。ここで、対応ブロックとは、対象フレームとは異なる、符号化済みのフレーム(前または後に位置するフレーム)のブロックであって、対象ブロックに対応する位置のブロックである。
また、フレームN−1において、対応ブロックに隣接する各ブロックには、各ブロックに対する動きベクトル情報mvt4,mvt0,mvt7,mvt1,mvt3,mvt5,mvt2,mvt6がそれぞれ示されている。
具体的には、対応ブロックの左上に隣接するブロックには、そのブロックに対する動きベクトル情報mvt4、対応ブロックの上に隣接するブロックには、そのブロックに対する動きベクトル情報mvt0が示されている。対応ブロックの右上に隣接するブロックには、そのブロックに対する動きベクトル情報mvt7、対応ブロックの左に隣接するブロックには、そのブロックに対する動きベクトル情報mvt1が示されている。対応ブロックの右に隣接するブロックには、そのブロックに対する動きベクトル情報mvt3、対応ブロックの左下に隣接するブロックには、そのブロックに対する動きベクトル情報mvt5が示されている。対応ブロックの下に隣接するブロックには、そのブロックに対する動きベクトル情報mvt2、対応ブロックの右下に隣接するブロックには、そのブロックに対する動きベクトル情報mvt6が示されている。
上述した式(9)の予測動きベクトル情報pmvは、対象ブロックに隣接するブロックの動きベクトル情報で生成されたが、次の式(11)に示すようにして予測動きベクトル情報pmvtm5,pmvtm9,pmvcolを生成することもできる。
pmvtm5 = med(mvcol, mvt0,…,mvt3)
pmvtm9 = med(mvcol, mvt0,…,mvt7)
pmvcol = med(mvcol, mvcol, mva, mvb,mvc) (11)
式(9)および式(11)のうち、どの予測動きベクトル情報を用いるかは、R-D最適化により選択される。ここで、Rは、直交変換係数まで含んだ発生符号量であり、Dは、原画像と復号画像の差分(歪)である。すなわち、最も発生符号量と原画像と復号画像の差分が最適になる予測動きベクトル情報が選択される。
pmvtm9 = med(mvcol, mvt0,…,mvt7)
pmvcol = med(mvcol, mvcol, mva, mvb,mvc) (11)
式(9)および式(11)のうち、どの予測動きベクトル情報を用いるかは、R-D最適化により選択される。ここで、Rは、直交変換係数まで含んだ発生符号量であり、Dは、原画像と復号画像の差分(歪)である。すなわち、最も発生符号量と原画像と復号画像の差分が最適になる予測動きベクトル情報が選択される。
このように、複数の予測動きベクトル情報を生成し、その中で最適なものを選択する方式を、以下、MV Competition方式とも称する。
図12に戻って、動き予測・補償部75は、ステップS54において、16×16画素乃至4×4画素からなる8種類の各インター予測モードに対して、上述した式(7)または式(8)で示されるコスト関数値を算出する。ここで算出されたコスト関数値は、上述した図8のステップS34で最適インター予測モードを決定する際に用いられる。
次に、図15のフローチャートを参照して、図8のステップS33のインターテンプレート動き予測処理について説明する。
テンプレート動き予測・補償部76は、ステップS71において、インターテンプレート予測モードの整数画素単位の動き予測、補償処理を行う。すなわち、テンプレート動き予測・補償部76は、インターテンプレートマッチング方式に基づいて整数画素単位の動きベクトルを探索し、その動きベクトルに基づいて参照画像に動き予測と補償処理を施し、予測画像を生成する。
ここで、インターテンプレートマッチング方式について、図16を参照して具体的に説明する。
図16の例においては、符号化対象の対象フレームと、動きベクトルを探索する際に参照される参照フレームが示されている。対象フレームには、これから符号化されようとしている対象ブロックAと、対象ブロックAに対して隣接するとともに、すでに符号化済みの画素で構成されるテンプレート領域Bが示されている。すなわち、テンプレート領域Bは、符号化処理をラスタスキャン順に行う場合には、図16に示されるように、対象ブロックAの左および上側に位置する領域であり、フレームメモリ72に復号画像が蓄積されている領域である。
テンプレート動き予測・補償部76は、参照フレーム上の所定の探索範囲E内において、例えば、SAD(Sum of Absolute Difference) 等をコスト関数としてテンプレートマッチング処理を行い、テンプレート領域Bの画素値と相関が最も高くなる領域B’を探索する。そして、テンプレート動き予測・補償部76は、探索された領域B’に対応するブロックA’を、対象ブロックAに対する予測画像として、対象ブロックAに対する動きベクトルPを探索する。
このように、インターテンプレートマッチング方式による動きベクトル探索処理は、テンプレートマッチング処理に復号画像を用いているので、所定の探索範囲Eを予め定めておくことにより、図1の画像符号化装置51と後述する図18の画像復号装置101において同一の処理を行うことが可能である。すなわち、画像復号装置101においても、テンプレート動き予測・補償部123を構成することにより、対象ブロックAに対する動きベクトルPの情報を画像復号装置101に送る必要がなくなるので、圧縮画像中における動きベクトル情報を低減することができる。
なお、インターテンプレート予測モードにおけるブロックおよびテンプレートのサイズは任意である。すなわち、動き予測・補償部75と同様に、図2で上述した16×16画素乃至4×4画素からなる8種類のブロックサイズから、1つのブロックサイズを固定して行うこともできるし、すべてのブロックサイズを候補として行うこともできる。ブロックサイズに応じて、テンプレートサイズは、可変としてもよいし、固定することもできる。
テンプレート動き予測・補償部76は、ステップS72において、小数画素精度動き予測・補償部77に、インターテンプレート予測モードの小数画素単位の動き予測、補償処理を行わせる。
図3を参照して上述したように、H.264/AVC方式においては、1/4画素精度までの予測・補償処理を行うことができる。しかしながら、小数画素精度についても、インターテンプレートマッチング方式に基づく動きベクトル探索処理を行うと、その探索に、対象ブロックA(図16)の画素値を用いていない、探索範囲Eが定められているなどの理由により、予測性能(残差)が低下してしまい、その結果、動きベクトルを持つ必要がないにも関わらず、符号化効率の低下を招いてしまう恐れがある。
そこで、インターテンプレート予測モードにおいては、小数画素単位の動き予測、補償処理が、インターテンプレートマッチング方式ではなく、ブロックマッチングなどの方式に基づいて行われる。
すなわち、小数画素精度動き予測・補償部77は、ステップS72において、小数画素単位の動きベクトルを、ブロックマッチングなどの方式に基づいて探索し、その動きベクトルに基づいて参照画像に動き予測と補償処理を施し、予測画像を生成する。その際、小数画素単位の動きベクトル情報を圧縮画像のヘッダ部に付加する必要があるので、小数画素精度動き予測・補償部77は、ステップS73において、小数画素単位の動きベクトルについて、動きベクトル情報を生成する。
小数画素単位の動きベクトル情報の生成方法について、再び、図13を参照して説明する。これからテンプレートマッチング方式に基づく動き予測・補償処理が行われる対象ブロックEと、既に符号化済みであり、対象ブロックEに隣接するブロックA乃至Dが示されている。ブロックEに関しては、ブロックEが有する動きベクトル情報mvEのうちの小数画素単位の動きベクトル情報mv_subEのみ符号化されればよい。
このとき、ブロックA乃至Dは、テンプレートマッチング方式に基づく動き予測・補償処理が行われたブロックとは限らないが、インター処理されるブロックである限り、動きベクトルmvX(X=A乃至D)を有する。それぞれの小数画素単位の動きベクトル情報を、mv_subX(X=A乃至D)とする。
なお、ブロックA乃至Dのいずれかがイントラ処理されるブロックである場合、そのブロックは動きベクトル情報を有さないので、その取り扱いは、H.264/AVC方式に準ずる。すなわち、ブロックXがイントラ処理されるブロックであるなら、次の式(12)とする。
mvX = 0 (12)
対象ブロックEの小数画素単位の動きベクトル情報mv_subEの予測動きベクトル情報pmv_subEを、メディアン予測に基づき、次の式(13)のように生成する。
pmv_sub E = med(mv_sub A,mv_sub B,mv_sub C) ・・・(13)
pmv_sub E = med(mv_sub A,mv_sub B,mv_sub C) ・・・(13)
なお、実際には、動きベクトル情報の水平方向、垂直方向のそれぞれの成分に対して、独立に処理が行われる。また、ブロックCに関する動きベクトル情報が、画枠の端であったり、あるいは、まだ符号化されていないなどの理由により、利用可能でない(unavailableである)場合には、ブロックCに関する動きベクトル情報は、ブロックDに関する動きベクトル情報で代用される。
対象ブロックEの小数画素単位の動きベクトル情報として、圧縮画像のヘッダに付加されるデータmvd_sub Eは、pmv_sub Eを用いて、次の式(14)のように生成される。
mvd_sub E = mv_sub E - pmv_sub E ・・・(14)
mvd_sub E = mv_sub E - pmv_sub E ・・・(14)
以上のようにして生成された動きベクトル情報は、生成した予測画像などとともに、テンプレート動き予測・補償部76に供給される。そして、この動きベクトル情報は、後述するステップS75のコスト関数算出の際にも用いられ、最終的に予測画像選択部78によりインターテンプレート予測モードにより生成された予測画像が選択された場合には、予測モード情報とともに、可逆符号化部66へ出力される。
なお、小数画素単位の動きベクトル情報についても、図14を参照して上述したMV Competition方式に基づいて、複数の予測動きベクトル情報を生成し、その中で最適なものを選択して、mvd_sub Eを生成することもできる。
図15に戻って、ステップS74において、小数画素精度動き予測・補償部77は、テンプレートスキップ判定処理を行う。このテンプレートスキップ判定処理の詳細は、図17を参照して後述するが、この処理により、対象ブロックがテンプレートスキップであると判定された場合、それを表す1ビットのフラグTM_skip_fragが1に設定される。
ステップS75において、テンプレート動き予測・補償部76は、インターテンプレート予測モードに対して、上述した式(7)または式(8)で示されるコスト関数を算出する。ここで算出されたコスト関数値は、上述した図8のステップS34で最適インター予測モードを決定する際に用いられる。
次に、図17のフローチャートを参照して、図15のステップS74のテンプレートスキップ判定処理を説明する。
小数画素精度動き予測・補償部77は、ステップS91において、対象ブロックのブロックサイズが16×16画素であるか否かを判定する。ステップS91において、ブロックサイズが16×16画素であると判定された場合、小数画素精度動き予測・補償部77は、ステップS92において、図15のステップS73で生成された動きベクトル情報mvd_sub Eが0であるか否かを判定する。
ステップS92において、mvd_sub Eが0であると判定された場合、小数画素精度動き予測・補償部77は、ステップS93において、直交変換係数が全て0であるか否かを判定する。ステップS93において、直交変換係数が全て0であると判定された場合、小数画素精度動き予測・補償部77は、ステップS94において、対象ブロックをテンプレートマッチングスキップであるとして、これを表す1ビットのフラグTM_skip_frag=1を設定する。
このフラグは、図15のステップS75におけるコスト関数算出の際にも用いられ、最終的に予測画像選択部78により対応する予測画像が選択されたときには、TM_skip_frag=1の場合、TM_skip_frag=1のみが可逆符号化部66へ出力される。
すなわち、この場合、対象ブロックが、参照フレームの空間的に対応する位置の画素を利用して動きベクトル情報を求めるブロックであるので、動きベクトル情報を符号化する必要はなく、TM_skip_frag=1だけ符号化されればよいので、更なる符号化効率の改善が望める。
一方、ステップS91において、ブロックサイズが16×16画素ではないと判定された場合、ステップS92において、mvd_sub Eが0ではないと判定された場合、または、ステップS93において、直交変換係数が全て0ではないと判定された場合、小数画素精度動き予測・補償部77は、ステップS95において、対象ブロックをテンプレートマッチングスキップではないとして、これを表す1ビットのフラグTM_skip_frag=0を設定する。
TM_skip_frag=0の場合、最終的に予測画像選択部78により対応する予測画像が選択されたときには、動きベクトル情報mvd_sub Eが可逆符号化部66に出力され、直交変換係数も動きベクトル情報mvd_sub Eも符号化される。
なお、説明の便宜上、小数画素精度動き予測・補償部77がテンプレートスキップ判定処理を行う例を説明したが、実際には、最終的に予測画像選択部78によりインターテンプレート予測モードでの動き予測・補償処理で予測された予測画像が選択されて、その予測画像の差分が演算され、直交変換され、量子化された後の係数が0であった場合において、さらに、動きベクトル情報mvd_sub Eが0であると判定されたときに、TM_skip_frag=1が設定される。
以上のように、インターテンプレート予測モードでの動き予測・補償処理を行う際に、処理対象となるブロックの整数画素単位については、テンプレートマッチング方式に基づいて動き予測、補償処理を行い、処理対象となるブロックの小数画素単位については、ブロックマッチング方式などに基づく動き予測・補償処理を行い、検索された動きベクトル情報を画像復号装置101に送信するようにしたので、予測性能(残差)の低下を抑制することができる。これにより、符号化精度の低減を抑制することができる。
また、その際、小数画素単位の動きベクトル情報と、予測動きベクトル情報との差分を求めて、それを符号化するようにしたので、さらに、符号化精度の低減を抑制することができる。
さらに、ブロックサイズが16×16画素であり、mvd_sub Eが0であり、直交変換係数が全て0である場合、テンプレートマッチングスキップであることを表す1ビットのフラグTM_skip_frag=1のみを符号化するようにしたので、更なる符号化効率の改善が望める。
符号化された圧縮画像は、所定の伝送路を介して伝送され、画像復号装置により復号される。図18は、このような画像復号装置の一実施の形態の構成を表している。
画像復号装置101は、蓄積バッファ111、可逆復号部112、逆量子化部113、逆直交変換部114、演算部115、デブロックフィルタ116、画面並べ替えバッファ117、D/A変換部118、フレームメモリ119、スイッチ120、イントラ予測部121、動き予測・補償部122、テンプレート動き予測・補償部123、小数画素精度動き予測・補償部124、およびスイッチ125により構成されている。
蓄積バッファ111は伝送されてきた圧縮画像を蓄積する。可逆復号部112は、蓄積バッファ111より供給された、図1の可逆符号化部66により符号化された情報を、可逆符号化部66の符号化方式に対応する方式で復号する。逆量子化部113は可逆復号部112により復号された画像を、図1の量子化部65の量子化方式に対応する方式で逆量子化する。逆直交変換部114は、図1の直交変換部64の直交変換方式に対応する方式で逆量子化部113の出力を逆直交変換する。
逆直交変換された出力は演算部115によりスイッチ125から供給される予測画像と加算されて復号される。デブロックフィルタ116は、復号された画像のブロック歪を除去した後、フレームメモリ119に供給し、蓄積させるとともに、画面並べ替えバッファ117に出力する。
画面並べ替えバッファ117は、画像の並べ替えを行う。すなわち、図1の画面並べ替えバッファ62により符号化の順番のために並べ替えられたフレームの順番が、元の表示の順番に並べ替えられる。D/A変換部118は、画面並べ替えバッファ117から供給された画像をD/A変換し、図示せぬディスプレイに出力し、表示させる。
スイッチ120は、インター処理される画像と参照される画像をフレームメモリ119から読み出し、動き予測・補償部122に出力するとともに、イントラ予測に用いられる画像をフレームメモリ119から読み出し、イントラ予測部121に供給する。
イントラ予測部121には、ヘッダ情報を復号して得られたイントラ予測モードに関する情報が可逆復号部112から供給される。イントラ予測部121は、この情報に基づいて、予測画像を生成し、生成した予測画像を、スイッチ125に出力する。
動き予測・補償部122には、ヘッダ情報を復号して得られた情報(予測モード情報、動きベクトル情報、参照フレーム情報)が可逆復号部112から供給される。インター予測モードである情報が供給された場合、動き予測・補償部122は、動きベクトル情報と参照フレーム情報に基づいて画像に動き予測と補償処理を施し、予測画像を生成する。インターテンプレート予測モードである情報が供給された場合、動き予測・補償部122は、フレームメモリ119から読み出されたインター処理される画像と参照される画像をテンプレート動き予測・補償部123に供給し、インターテンプレート予測モードでの動き予測・補償処理を行わせる。
また、動き予測・補償部122は、予測モード情報に応じて、インター予測モードにより生成された予測画像、または、インターテンプレート予測モードにより生成された予測画像のどちらか一方をスイッチ125に出力する。
テンプレート動き予測・補償部123と小数画素精度動き予測・補償部124は、インターテンプレート予測モードの動き予測・補償処理を行う。テンプレート動き予測・補償部123は、インターテンプレート予測モードのうち、整数画素単位の動き予測と補償処理を行い、小数画素精度動き予測・補償部124は、小数画素単位の動き予測と補償処理を行う。
すなわち、テンプレート動き予測・補償部123は、フレームメモリ119から読み出されたインター処理される画像と参照される画像に基づいて、インターテンプレート予測モードの整数画素単位の動き予測と補償処理を行い、予測画像を生成する。なお、この動き予測・補償処理は、画像符号化装置51のテンプレート動き予測・補償部76と基本的に同じ処理である。
さらに、テンプレート動き予測・補償部123は、フレームメモリ119から読み出されたインター処理される画像と参照される画像を、小数画素精度動き予測・補償部124に供給する。テンプレート動き予測・補償部123は、また、生成した予測画像と小数画素精度動き予測・補償部124により生成された予測画像を、動き予測・補償部122に供給する。
小数画素精度動き予測・補償部124には、ヘッダ情報を復号して得られた情報(動きベクトル情報またはフラグ情報)が可逆復号部112から供給される。小数画素精度動き予測・補償部124は、供給された動きベクトル情報またはフラグ情報に基づいて画像に動き予測と補償処理を施し、予測画像を生成する。この予測画像は、テンプレート動き予測・補償部123に出力される。
スイッチ125は、動き予測・補償部122またはイントラ予測部121により生成された予測画像を選択し、演算部115に供給する。
次に、図19のフローチャートを参照して、画像復号装置101が実行する復号処理について説明する。
ステップS131において、蓄積バッファ111は伝送されてきた画像を蓄積する。ステップS132において、可逆復号部112は、蓄積バッファ111から供給される圧縮画像を復号する。すなわち、図1の可逆符号化部66により符号化されたIピクチャ、Pピクチャ、並びにBピクチャが復号される。
このとき、動きベクトル情報、参照フレーム情報、予測モード情報(イントラ予測モード、インター予測モード、またはインターテンプレート予測モードを表す情報)、フラグ情報も復号される。すなわち、予測モード情報がイントラ予測モード情報である場合、予測モード情報は、イントラ予測部121に供給される。
予測モード情報がインター予測モード情報である場合、予測モード情報と対応する動きベクトル情報は、動き予測・補償部122に供給される。予測モード情報がインターテンプレート予測モード情報である場合、予測モード情報は、動き予測・補償部122に供給され、対応する動きベクトル情報、または、テンプレートマッチングスキップであることを表すフラグ情報は、小数画素精度動き予測・補償部124に供給される。
なお、テンプレートマッチングスキップであることを表すフラグ情報が復号された場合、全て0である直交変換係数が逆量子化部113に供給される。
ステップS133において、逆量子化部113は可逆復号部112により復号された変換係数を、図1の量子化部65の特性に対応する特性で逆量子化する。ステップS134において逆直交変換部114は逆量子化部113により逆量子化された変換係数を、図1の直交変換部64の特性に対応する特性で逆直交変換する。これにより図1の直交変換部64の入力(演算部63の出力)に対応する差分情報が復号されたことになる。
ステップS135において、演算部115は、後述するステップS141の処理で選択され、スイッチ125を介して入力される予測画像を差分情報と加算する。これにより元の画像が復号される。ステップS136においてデブロックフィルタ116は、演算部115より出力された画像をフィルタリングする。これによりブロック歪みが除去される。ステップS137においてフレームメモリ119は、フィルタリングされた画像を記憶する。
ステップS138において、イントラ予測部121、動き予測・補償部122、またはテンプレート動き予測・補償部123および小数画素精度動き予測・補償部124は、可逆復号部112から供給される予測モード情報に対応して、それぞれ画像の予測処理を行う。
すなわち、可逆復号部112からイントラ予測モード情報が供給された場合、イントラ予測部121は、イントラ予測モードのイントラ予測処理を行う。可逆復号部112からインター予測モード情報が供給された場合、動き予測・補償部122は、インター予測モードの動き予測・補償処理を行う。また、可逆復号部112からインターテンプレート予測モード情報が供給された場合、テンプレート動き予測・補償部123および小数画素精度動き予測・補償部124は、インターテンプレート予測モードの動き予測・補償処理を行う。
ステップS138における予測処理の詳細は、図20を参照して後述するが、この処理により、イントラ予測部121により生成された予測画像、動き予測・補償部122により生成された予測画像、またはテンプレート動き予測・補償部123および小数画素精度動き予測・補償部124により生成された予測画像がスイッチ125に供給される。
ステップS139において、スイッチ125は予測画像を選択する。すなわち、イントラ予測部121により生成された予測画像、動き予測・補償部122により生成された予測画像、またはテンプレート動き予測・補償部123および小数画素精度動き予測・補償部124により生成された予測画像が供給されるので、供給された予測画像が選択されて演算部115に供給され、上述したように、ステップS134において逆直交変換部114の出力と加算される。
ステップS140において、画面並べ替えバッファ117は並べ替えを行う。すなわち画像符号化装置51の画面並べ替えバッファ62により符号化のために並べ替えられたフレームの順序が、元の表示の順序に並べ替えられる。
ステップS141において、D/A変換部118は、画面並べ替えバッファ117からの画像をD/A変換する。この画像が図示せぬディスプレイに出力され、画像が表示される。
次に、図20のフローチャートを参照して、図19のステップS138の予測処理を説明する。
処理対象の画像がイントラ処理される画像である場合、可逆復号部112からイントラ予測モード情報がイントラ予測部121に供給される。イントラ予測部121は、ステップS171において、イントラ予測モード情報が供給されたか否かを判定し、イントラ予測モード情報が供給されたと判定した場合、ステップS172において、イントラ予測を行う。
すなわち、処理対象の画像がイントラ処理される画像である場合、必要な画像がフレームメモリ119から読み出され、スイッチ120を介してイントラ予測部121に供給される。ステップS172においてイントラ予測部121は、可逆復号部112から供給されるイントラ予測モード情報に従ってイントラ予測し、予測画像を生成する。
ステップS171において、イントラ予測モード情報が供給されなかったと判定された場合、処理は、ステップS173に進む。
処理対象の画像がインター処理される画像である場合、可逆復号部112からインター予測モード情報、参照フレーム情報、動きベクトル情報が動き予測・補償部122に供給される。ステップS173において、動き予測・補償部122は、インター予測モード情報が供給されたか否かを判定し、インター予測モード情報が供給されたと判定した場合、ステップS174において、インター動き予測を行う。
すなわち、処理対象の画像がインター予測処理される画像である場合、必要な画像がフレームメモリ119から読み出され、スイッチ120を介して動き予測・補償部122に供給される。ステップS174において動き予測・補償部122は、可逆復号部112から供給される動きベクトルに基づいて、インター予測モードの動き予測をし、予測画像を生成する。
ステップS171において、インター予測モード情報が供給されなかったと判定された場合、処理は、ステップS175に進む。すなわち、インターテンプレート予測モード情報が供給されているので、動き予測・補償部122は、ステップS175およびS176において、テンプレート動き予測・補償部123および小数画素精度動き予測・補償部124に、インターテンプレート予測モードの動き予測・補償処理を行わせる。
具体的に説明すると、処理対象の画像がインターテンプレート予測処理される画像である場合、必要な画像がフレームメモリ119から読み出され、スイッチ120および動き予測・補償部122を介してテンプレート動き予測・補償部123に供給される。また、必要な画像は、テンプレート動き予測・補償部123を介して、小数画素精度動き予測・補償部124に供給される。さらに、小数画素精度動き予測・補償部124には、可逆復号部112から小数画素精度の動きベクトル情報またはフラグ情報(TM_skip_frag=1)が供給される。
テンプレート動き予測・補償部123は、ステップS175において、インターテンプレート予測モードの整数画素単位の動き予測、補償処理を行う。すなわち、テンプレート動き予測・補償部123は、インターテンプレートマッチング方式に基づいて整数画素単位の動きベクトルを探索し、その動きベクトルに基づいて参照画像に動き予測と補償処理を施し、予測画像を生成する。
小数画素精度動き予測・補償部124は、ステップS176において、可逆復号部112から供給される小数画素単位の動きベクトル情報、または、フラグ情報(TM_skip_frag=1)に基づいて、参照画像に対して動き予測と補償処理を行い、予測画像を生成する。
なお、復号された小数画素単位の動きベクトル情報は、図15のステップS72で求められた動きベクトル情報と、ステップS73において式(13)や図14を参照して上述したMV Competition方式に基づいて隣接するブロックの動きベクトル情報から生成された予測動きベクトル情報との差分の情報(mvd_sub E)である。
したがって、小数画素精度動き予測・補償部124は、小数画素精度動き予測・補償部77と同様に予測動きベクトル情報を生成し、生成した予測動きベクトル情報と復号された小数画素単位の動きベクトル情報とを加算して、小数画素単位の動きベクトル情報を求める。そして、小数画素精度動き予測・補償部124は、求めた小数画素単位の動きベクトル情報で、予測画像を生成する。
一方、フラグ情報が供給された場合には、対象ブロックが、参照フレームの空間的に対応する位置の画素を利用して動きベクトル情報を求めるブロックであるので、参照画像の対応する画素を利用して予測画像が生成される。
以上のように、整数画素精度について、テンプレートマッチングに基づく動き予測を、画像符号化装置および画像復号装置の両方で行うことにより、整数画素精度の動きベクトル情報を送らずに、良質な画質を表示させることができる。
さらに、整数画素精度について、テンプレートマッチングに基づく動き予測を、画像符号化装置および画像復号装置の両方で行いながら、小数画素精度の動きベクトルを、圧縮画像中に符号化して、画像復号装置に送ることで、圧縮率の低下を抑制することができる。
また、H.264/AVC方式による動き予測・補償処理を行う際に、テンプレートマッチングに基づく予測も行い、コスト関数のよい方を選択して符号化処理を行うようにしたので、符号化効率を向上することができる。
以上においては、符号化方式としてH.264/AVC方式を用いるようにしたが、その他の符号化方式/復号方式を用いることもできる。
なお、本発明は、例えば、MPEG、H.26x等の様に、離散コサイン変換等の直交変換と動き補償によって圧縮された画像情報(ビットストリーム)を、衛星放送、ケーブルTV(テレビジョン)、インターネット、および携帯電話機などのネットワークメディアを介して受信する際に、あるいは、光、磁気ディスク、およびフラッシュメモリのような記憶メディア上で処理する際に用いられる画像符号化装置および画像復号装置に適用することができる。
上述した一連の処理は、ハードウエアにより実行させることもできるし、ソフトウエアにより実行させることもできる。一連の処理をソフトウエアにより実行させる場合には、そのソフトウエアを構成するプログラムが、専用のハードウエアに組み込まれているコンピュータ、または、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどに、プログラム記録媒体からインストールされる。
コンピュータにインストールされ、コンピュータによって実行可能な状態とされるプログラムを格納するプログラム記録媒体は、磁気ディスク(フレキシブルディスクを含む)、光ディスク(CD-ROM(Compact Disc-Read Only Memory),DVD(Digital Versatile Disc)を含む)、光磁気ディスクを含む)、もしくは半導体メモリなどよりなるパッケージメディアであるリムーバブルメディア、または、プログラムが一時的もしくは永続的に格納されるROMやハードディスクなどにより構成される。プログラム記録媒体へのプログラムの格納は、必要に応じてルータ、モデムなどのインタフェースを介して、ローカルエリアネットワーク、インターネット、デジタル衛星放送といった、有線または無線の通信媒体を利用して行われる。
なお、本明細書において、プログラムを記述するステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
また、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
51 画像符号化装置, 66 可逆符号化部, 74 イントラ予測部, 75 動き予測・補償部, 76 テンプレート動き予測・補償部, 77 小数画素精度動き予測・補償部, 78 予測画像選択部, 112 可逆復号部, 121 イントラ予測部, 122 動き予測・補償部, 123 テンプレート動き予測・補償部, 124 小数画素精度動き予測・補償部, 125 スイッチ
Claims (13)
- フレームの第1の対象ブロックの整数画素精度の動きベクトルを、前記第1の対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して探索する第1の動き予測補償部と、
前記第1の対象ブロックの小数画素精度の動きベクトルを、前記第1の対象ブロックを利用して探索する第2の動き予測補償部と、
前記第1の対象ブロックに対する動きベクトルの情報として、前記第2の動き予測補償部により探索された前記小数画素精度の動きベクトルの情報を符号化する符号化部と
を備える画像符号化装置。 - 前記第2の動き予測補償部は、符号化済みのブロックであって、前記第1の対象ブロックに隣接するブロックである隣接ブロックに対する動きベクトルの情報を用いて前記小数画素精度の動きベクトルの予測値を生成し、
前記符号化部は、前記第1の対象ブロックに対する動きベクトルの情報として、前記小数画素精度の動きベクトルの情報と前記予測値との差分を符号化する
請求項1に記載の画像符号化装置。 - 前記第2の動き予測補償部は、符号化済みのブロックであって、前記第1の対象ブロックに隣接するブロックである隣接ブロックに対する動きベクトルの情報、前記フレームと異なる符号化済みフレームのブロックであって、前記第1の対象ブロックに対応する位置のブロックである対応ブロックと前記対応ブロックに隣接するブロックに対する動きベクトルの情報、または、前記対応ブロックと前記隣接ブロックに対する動きベクトルの情報を用いて前記小数画素精度の動きベクトルの予測値を生成し、
前記符号化部は、前記第1の対象ブロックに対する動きベクトルの情報として、前記小数画素精度の動きベクトルの情報と前記予測値との差分を符号化する
請求項1に記載の画像符号化装置。 - 前記符号化部は、前記第1の対象ブロックの大きさが16×16画素であり、前記小数画素精度の動きベクトルの予測値が0であり、かつ、全ての直交変換係数が0である場合、前記第1の対象ブロックに対する動きベクトルの情報として、前記第1の対象ブロックがテンプレートスキップブロックであることを表すフラグのみを符号化する
請求項1に記載の画像符号化装置。 - 前記フレームの第2の対象ブロックの動きベクトルを、前記第2の対象ブロックを利用して探索する第3の動き予測補償部と、
前記第1または第2の動き予測補償部により探索された前記動きベクトルに基づく予測画像と、前記第3の動き予測補償部により探索された前記動きベクトルに基づく予測画像のうちの一方を選択する画像選択部とをさらに備える
請求項1に記載の画像符号化装置。 - 前記符号化部は、算術符号化を行う場合、前記第1および第2の動き予測補償部が対象とする前記第1の対象ブロックに対する第1のコンテクスト、および前記第3の動き予測補償部が対象とする前記第2の対象ブロックに対する第2のコンテクストをそれぞれ定義し、
前記第1の対象ブロックに対する動きベクトルの情報を前記第1のコンテクストを用いて符号化し、前記第2の対象ブロックに対する動きベクトルの情報を前記第2のコンテクストを用いて符号化する
請求項5に記載の画像符号化装置。 - 前記符号化部は、算術符号化を行う場合、1つのコンテクストを定義し、
前記第1の対象ブロックに対する動きベクトルの情報および前記第2の対象ブロックに対する動きベクトルの情報を前記コンテクストを用いて符号化する
請求項5に記載の画像符号化装置。 - 前記符号化部は、算術符号化を行う場合、整数画素精度の動きベクトルの情報に対する第1のコンテクストと、小数画素精度の動きベクトルの情報に対する第2のコンテクストをそれぞれ定義し、
前記第1の対象ブロックに対する動きベクトルの情報のうち、前記小数画素精度の動きベクトルの情報を前記第2のコンテクストを用いて符号化し、
前記第2の対象ブロックに対する動きベクトルの情報のうち、前記整数画素精度の動きベクトルの情報を前記第1のコンテクストを用いて符号化し、前記小数画素精度の動きベクトルの情報を前記第2のコンテクストを用いて符号化する
請求項5に記載の画像符号化装置。 - 画像符号化装置が、
フレームの対象ブロックの整数画素精度の動きベクトルを、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して探索し、
前記対象ブロックの小数画素精度の動きベクトルを、前記対象ブロックを利用して探索し、
前記対象ブロックに対する動きベクトルの情報として、探索された前記小数画素精度の動きベクトルの情報を符号化する
ステップを含む画像符号化方法。 - フレームの対象ブロックの整数画素精度の動きベクトルを、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して探索し、
前記対象ブロックの小数画素精度の動きベクトルを、前記対象ブロックを利用して探索し、
前記対象ブロックに対する動きベクトルの情報として、探索された前記小数画素精度の動きベクトルの情報を符号化する
ステップを含む処理をコンピュータに実行させるプログラム。 - 符号化された動きベクトルの情報を復号する復号部と、
フレームの第1の対象ブロックの整数画素精度について、前記第1の対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して動きベクトルを探索することで、整数画素精度の予測画像を生成する第1の動き予測補償部と、
前記復号部により復号された前記第1の対象ブロックの小数画素精度の動きベクトルの情報を用いて、小数画素精度の予測画像を生成する第2の動き予測補償部と
を備える画像復号装置。 - 画像復号装置が、
符号化された動きベクトルの情報を復号し、
フレームの対象ブロックの整数画素精度について、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して動きベクトルを探索することで、整数画素精度の予測画像を生成し、
復号された前記対象ブロックの小数画素精度の動きベクトルの情報を用いて、小数画素精度の予測画像を生成する
ステップを含む画像復号装置。 - 符号化された動きベクトルの情報を復号し、
フレームの対象ブロックの整数画素精度について、前記対象ブロックに対して所定の位置関係で隣接するとともに復号画像から生成されるテンプレートを利用して動きベクトルを探索することで、整数画素精度の予測画像を生成し、
復号された前記対象ブロックの小数画素精度の動きベクトルの情報を用いて、小数画素精度の予測画像を生成する
ステップを含む処理をコンピュータに実行させるプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008172269A JP2010016453A (ja) | 2008-07-01 | 2008-07-01 | 画像符号化装置および方法、画像復号装置および方法、並びにプログラム |
| PCT/JP2009/062026 WO2010001916A1 (ja) | 2008-07-01 | 2009-07-01 | 画像処理装置および方法 |
| US13/001,373 US20110103486A1 (en) | 2008-07-01 | 2009-07-01 | Image processing apparatus and image processing method |
| CN2009801253546A CN102077596A (zh) | 2008-07-01 | 2009-07-01 | 图像处理设备和图像处理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008172269A JP2010016453A (ja) | 2008-07-01 | 2008-07-01 | 画像符号化装置および方法、画像復号装置および方法、並びにプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010016453A true JP2010016453A (ja) | 2010-01-21 |
| JP2010016453A5 JP2010016453A5 (ja) | 2011-07-14 |
Family
ID=41466008
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008172269A Pending JP2010016453A (ja) | 2008-07-01 | 2008-07-01 | 画像符号化装置および方法、画像復号装置および方法、並びにプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20110103486A1 (ja) |
| JP (1) | JP2010016453A (ja) |
| CN (1) | CN102077596A (ja) |
| WO (1) | WO2010001916A1 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011166206A (ja) * | 2010-02-04 | 2011-08-25 | Nippon Telegr & Teleph Corp <Ntt> | 動きベクトル予測方法,動きベクトル予測装置および動きベクトル予測プログラム |
| JP2011166207A (ja) * | 2010-02-04 | 2011-08-25 | Nippon Telegr & Teleph Corp <Ntt> | 動きベクトル予測方法,動きベクトル予測装置および動きベクトル予測プログラム |
| WO2011121942A1 (ja) * | 2010-03-31 | 2011-10-06 | 株式会社Jvcケンウッド | 動画像符号化装置、動画像符号化方法及び動画像符号化プログラム、ならびに動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2011217104A (ja) * | 2010-03-31 | 2011-10-27 | Jvc Kenwood Corp | 動画像符号化装置、動画像符号化方法及び動画像符号化プログラム |
| JP2011217105A (ja) * | 2010-03-31 | 2011-10-27 | Jvc Kenwood Corp | 動画像復号装置、動画像復号方法及び動画像復号プログラム |
| CN102812706A (zh) * | 2010-03-16 | 2012-12-05 | 汤姆逊许可证公司 | 用于视频编码和解码的隐式自适应运动向量预测值选择的方法和装置 |
| JP2013543713A (ja) * | 2010-10-13 | 2013-12-05 | クゥアルコム・インコーポレイテッド | ビデオ符号化のための適応動きベクトル解像度信号伝達 |
| US9237355B2 (en) | 2010-02-19 | 2016-01-12 | Qualcomm Incorporated | Adaptive motion resolution for video coding |
| US9729897B2 (en) | 2010-01-18 | 2017-08-08 | Hfi Innovation Inc. | Motion prediction method |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9516341B2 (en) | 2010-01-19 | 2016-12-06 | Thomson Licensing | Methods and apparatus for reduced complexity template matching prediction for video encoding and decoding |
| CN102300088B (zh) * | 2010-06-25 | 2013-11-06 | 财团法人工业技术研究院 | 画面内预测模式最佳化方法与图像压缩方法以及装置 |
| JP2012151576A (ja) | 2011-01-18 | 2012-08-09 | Hitachi Ltd | 画像符号化方法、画像符号化装置、画像復号方法及び画像復号装置 |
| CN108111849B (zh) * | 2011-10-17 | 2021-11-02 | 株式会社Kt | 用解码装置对待解码的具有当前块的视频信号解码的方法 |
| CN104641644A (zh) * | 2012-05-14 | 2015-05-20 | 卢卡·罗萨托 | 基于沿时间的样本序列的混合的编码和解码 |
| JP6168365B2 (ja) * | 2012-06-12 | 2017-07-26 | サン パテント トラスト | 動画像符号化方法、動画像復号化方法、動画像符号化装置および動画像復号化装置 |
| US9942560B2 (en) | 2014-01-08 | 2018-04-10 | Microsoft Technology Licensing, Llc | Encoding screen capture data |
| US9774881B2 (en) | 2014-01-08 | 2017-09-26 | Microsoft Technology Licensing, Llc | Representing motion vectors in an encoded bitstream |
| US9749642B2 (en) | 2014-01-08 | 2017-08-29 | Microsoft Technology Licensing, Llc | Selection of motion vector precision |
| CN108235007B (zh) * | 2016-12-12 | 2023-06-27 | 上海天荷电子信息有限公司 | 各模式使用不同精度同种编码参数的数据压缩方法和装置 |
| TWI752341B (zh) * | 2018-08-04 | 2022-01-11 | 大陸商北京字節跳動網絡技術有限公司 | 不同解碼器側運動矢量推導模式之間的交互 |
| CN111010569B (zh) | 2018-10-06 | 2023-02-28 | 北京字节跳动网络技术有限公司 | Bio中的时间梯度计算的改善 |
| WO2021180710A1 (en) * | 2020-03-12 | 2021-09-16 | Interdigital Vc Holdings France | Method and apparatus for video encoding and decoding |
| CN113873244B (zh) * | 2020-06-30 | 2023-10-20 | 华为技术有限公司 | 一种系数编解码方法和系数编解码装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005318497A (ja) * | 2003-12-26 | 2005-11-10 | Ntt Docomo Inc | 画像符号化装置、画像符号化方法、画像符号化プログラム、画像復号装置、画像復号方法、及び画像復号プログラム。 |
| JP2007043651A (ja) * | 2005-07-05 | 2007-02-15 | Ntt Docomo Inc | 動画像符号化装置、動画像符号化方法、動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2007067551A (ja) * | 2005-08-29 | 2007-03-15 | Nippon Telegr & Teleph Corp <Ntt> | 動きベクトル推定方法,動きベクトル推定装置,動きベクトル推定プログラムおよび動きベクトル推定プログラム記録媒体 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6202344B1 (en) * | 1998-07-14 | 2001-03-20 | Paul W. W. Clarke | Method and machine for changing agricultural mulch |
| US6289052B1 (en) * | 1999-06-07 | 2001-09-11 | Lucent Technologies Inc. | Methods and apparatus for motion estimation using causal templates |
| WO2003043347A1 (en) * | 2001-11-16 | 2003-05-22 | Ntt Docomo, Inc. | Image encoding method, image decoding method, image encoder, image decode, program, computer data signal, and image transmission system |
| US7408988B2 (en) * | 2002-12-20 | 2008-08-05 | Lsi Corporation | Motion estimation engine with parallel interpolation and search hardware |
| AU2003282462A1 (en) * | 2003-10-09 | 2005-05-26 | Thomson Licensing | Direct mode derivation process for error concealment |
| JP2006020095A (ja) * | 2004-07-01 | 2006-01-19 | Sharp Corp | 動きベクトル検出回路、画像符号化回路、動きベクトル検出方法および画像符号化方法 |
| KR20070046852A (ko) * | 2004-08-13 | 2007-05-03 | 코닌클리케 필립스 일렉트로닉스 엔.브이. | 혼합된 그래픽 및 비디오 소스의 압축을 위한 시스템 및방법 |
| CN101023673B (zh) * | 2004-09-16 | 2011-06-08 | 汤姆逊许可证公司 | 具有利用局部亮度变化的加权预测的视频编解码器 |
| CN1658673A (zh) * | 2005-03-23 | 2005-08-24 | 南京大学 | 视频压缩编解码方法 |
| WO2006106935A1 (ja) * | 2005-04-01 | 2006-10-12 | Matsushita Electric Industrial Co., Ltd. | 画像復号化装置及び画像復号化方法 |
| JP4551814B2 (ja) * | 2005-05-16 | 2010-09-29 | Okiセミコンダクタ株式会社 | 無線通信装置 |
| JP4686280B2 (ja) * | 2005-07-06 | 2011-05-25 | 株式会社東芝 | 動画像符号化装置 |
| KR100711878B1 (ko) * | 2005-08-30 | 2007-04-25 | 삼성에스디아이 주식회사 | 레이저 열 전사 장치 및 레이저 열 전사 방법 |
| US8170102B2 (en) * | 2005-12-19 | 2012-05-01 | Seiko Epson Corporation | Macroblock homogeneity analysis and inter mode prediction |
| KR101406156B1 (ko) * | 2006-02-02 | 2014-06-13 | 톰슨 라이센싱 | 움직임 보상 예측을 위한 적응 가중 선택 방법 및 장치 |
| AU2007244443A1 (en) * | 2006-04-28 | 2007-11-08 | Ntt Docomo, Inc. | Image predictive coding device, image predictive coding method, image predictive coding program, image predictive decoding device, image predictive decoding method and image predictive decoding program |
-
2008
- 2008-07-01 JP JP2008172269A patent/JP2010016453A/ja active Pending
-
2009
- 2009-07-01 US US13/001,373 patent/US20110103486A1/en not_active Abandoned
- 2009-07-01 WO PCT/JP2009/062026 patent/WO2010001916A1/ja active Application Filing
- 2009-07-01 CN CN2009801253546A patent/CN102077596A/zh active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005318497A (ja) * | 2003-12-26 | 2005-11-10 | Ntt Docomo Inc | 画像符号化装置、画像符号化方法、画像符号化プログラム、画像復号装置、画像復号方法、及び画像復号プログラム。 |
| JP2007043651A (ja) * | 2005-07-05 | 2007-02-15 | Ntt Docomo Inc | 動画像符号化装置、動画像符号化方法、動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2007067551A (ja) * | 2005-08-29 | 2007-03-15 | Nippon Telegr & Teleph Corp <Ntt> | 動きベクトル推定方法,動きベクトル推定装置,動きベクトル推定プログラムおよび動きベクトル推定プログラム記録媒体 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9729897B2 (en) | 2010-01-18 | 2017-08-08 | Hfi Innovation Inc. | Motion prediction method |
| JP2011166206A (ja) * | 2010-02-04 | 2011-08-25 | Nippon Telegr & Teleph Corp <Ntt> | 動きベクトル予測方法,動きベクトル予測装置および動きベクトル予測プログラム |
| JP2011166207A (ja) * | 2010-02-04 | 2011-08-25 | Nippon Telegr & Teleph Corp <Ntt> | 動きベクトル予測方法,動きベクトル予測装置および動きベクトル予測プログラム |
| US9237355B2 (en) | 2010-02-19 | 2016-01-12 | Qualcomm Incorporated | Adaptive motion resolution for video coding |
| KR20130006616A (ko) * | 2010-03-16 | 2013-01-17 | 톰슨 라이센싱 | 비디오 인코딩 및 디코딩을 위한 암시적인 적응 움직임 벡터 예측자 선택을 위한 방법 및 장치 |
| CN102812706A (zh) * | 2010-03-16 | 2012-12-05 | 汤姆逊许可证公司 | 用于视频编码和解码的隐式自适应运动向量预测值选择的方法和装置 |
| JP2013523010A (ja) * | 2010-03-16 | 2013-06-13 | トムソン ライセンシング | ビデオ符号化およびビデオ復号化のための暗示的適応型動きベクトル予測器選択の方法および装置 |
| US9628788B2 (en) | 2010-03-16 | 2017-04-18 | Thomson Licensing | Methods and apparatus for implicit adaptive motion vector predictor selection for video encoding and decoding |
| KR101952606B1 (ko) * | 2010-03-16 | 2019-02-27 | 톰슨 라이센싱 | 비디오 인코딩 및 디코딩을 위한 암시적인 적응 움직임 벡터 예측자 선택을 위한 방법 및 장치 |
| JP2011217105A (ja) * | 2010-03-31 | 2011-10-27 | Jvc Kenwood Corp | 動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2011217104A (ja) * | 2010-03-31 | 2011-10-27 | Jvc Kenwood Corp | 動画像符号化装置、動画像符号化方法及び動画像符号化プログラム |
| US9237354B2 (en) | 2010-03-31 | 2016-01-12 | JVC Kenwood Corporation | Video coding apparatus, video coding method and video coding program, and video decoding apparatus, video decoding method and video decoding program |
| WO2011121942A1 (ja) * | 2010-03-31 | 2011-10-06 | 株式会社Jvcケンウッド | 動画像符号化装置、動画像符号化方法及び動画像符号化プログラム、ならびに動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2013543713A (ja) * | 2010-10-13 | 2013-12-05 | クゥアルコム・インコーポレイテッド | ビデオ符号化のための適応動きベクトル解像度信号伝達 |
| US10327008B2 (en) | 2010-10-13 | 2019-06-18 | Qualcomm Incorporated | Adaptive motion vector resolution signaling for video coding |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010001916A1 (ja) | 2010-01-07 |
| CN102077596A (zh) | 2011-05-25 |
| US20110103486A1 (en) | 2011-05-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2010001916A1 (ja) | 画像処理装置および方法 | |
| WO2010001917A1 (ja) | 画像処理装置および方法 | |
| RU2696237C2 (ru) | Способ декодирования видеосигнала | |
| WO2010001918A1 (ja) | 画像処理装置および方法、並びにプログラム | |
| JP6057140B2 (ja) | 画像処理装置および方法、プログラム、並びに、記録媒体 | |
| US10523967B2 (en) | Method for deriving a temporal predictive motion vector, and apparatus using the method | |
| JP5169978B2 (ja) | 画像処理装置および方法 | |
| WO2010131601A1 (ja) | 画像処理装置および方法、並びにプログラム | |
| TWI647949B (zh) | Image prediction decoding method | |
| JP2015029348A (ja) | 動画像復号装置 | |
| JP2017511620A (ja) | オーバーラップエリア内の再構成されたサンプル値のブロックベクトル予測及び推定におけるイノベーション | |
| WO2010123054A1 (ja) | 画像処理装置および方法 | |
| WO2010123055A1 (ja) | 画像処理装置および方法 | |
| WO2010123057A1 (ja) | 画像処理装置および方法 | |
| JP5488684B2 (ja) | 画像処理装置および方法、プログラム、並びに記録媒体 | |
| JP2009049969A (ja) | 動画像符号化装置及び方法並びに動画像復号化装置及び方法 | |
| JP2006295503A (ja) | 再符号化装置、再符号化方法、および再符号化用プログラム | |
| JP2013059132A (ja) | 画像処理装置および方法、並びに記録媒体 | |
| JP2008193501A (ja) | 画像符号化装置及び画像符号化方法 | |
| JP5571262B2 (ja) | 画像符号化方法及び画像復号化方法 | |
| JP6268556B2 (ja) | 画像処理装置および方法、プログラム、並びに、記録媒体 | |
| JP6102977B2 (ja) | 画像処理装置および方法、プログラム、並びに記録媒体 | |
| JP5776803B2 (ja) | 画像処理装置および方法、並びに記録媒体 | |
| JP5776804B2 (ja) | 画像処理装置および方法、並びに記録媒体 | |
| JP2015167387A (ja) | 画像処理装置および方法、プログラム、並びに記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110526 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110526 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120515 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121002 |