JP2010000945A - クローラ走行装置 - Google Patents
クローラ走行装置 Download PDFInfo
- Publication number
- JP2010000945A JP2010000945A JP2008162172A JP2008162172A JP2010000945A JP 2010000945 A JP2010000945 A JP 2010000945A JP 2008162172 A JP2008162172 A JP 2008162172A JP 2008162172 A JP2008162172 A JP 2008162172A JP 2010000945 A JP2010000945 A JP 2010000945A
- Authority
- JP
- Japan
- Prior art keywords
- sprocket
- crawler
- traveling device
- auxiliary
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003384 imaging method Methods 0.000 claims description 7
- 230000000694 effects Effects 0.000 description 8
- 230000005484 gravity Effects 0.000 description 6
- 230000009194 climbing Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000001154 acute effect Effects 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000002360 explosive Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000012857 radioactive material Substances 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000002341 toxic gas Substances 0.000 description 1
Images














Landscapes
- Handcart (AREA)
- Manipulator (AREA)
Abstract
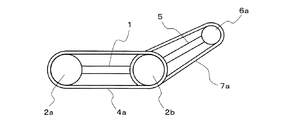
【解決手段】基体1の左側部および右側部のそれぞれの前後方向に複数個のスプロケット2a,2b及び2c,2dが設けられ、スプロケット2a,2dを駆動するモータ3a,3bを備え、前後方向の各スプロケットにクローラベルト4a,4bが掛け渡され、基体1の前後方向の端部にアーム5の一端側が回動自在に取り付けられ、アーム5の他端側に回転および固定の制御が可能な補助スプロケット6a,6bが軸着され、アーム5側に位置するスプロケット2b,2dと補助スプロケット6a,6bとの間に補助クローラベルト7a,7bが掛け渡され、モータ3a,3bの駆動力により、アーム部が上下方向に回動可能に構成した。
【選択図】図1
Description
従来のクローラ走行装置として、例えば、本体の前後左右の四隅に独立したクローラを備え、前後のクローラの旋回軸間距離を、最大旋回円軌跡が干渉しない距離に設定し、中間位置に重心を設定することで、走行性に優れ、段差地形でも転倒しにくい災害救援ロボットが提案されている(例えば、特許文献1参照)。
また、アームを搭載したベースの左右両側にクローラを設け、クローラは中央部に設けた中央ホイールによりベースに対して独立して正逆方向に回転可能に構成されたクローラ走行ロボットが提案されている。独立したクローラの動きとアームにより重心のバランスを最適に維持して走行でき、転倒時にはアーム等により復帰可能に構成されている(例えば、特許文献2参照)。
また、特許文献2に示す技術では、走行用のモータとは別に、アーム等を駆動させるモータやアーム制御機器が別途必要となり、重量的にもまた体積的にも過大なものとなってしまい、本来の目的である、わずかなスキマや狭い空間での作業のために必要な、小形化、軽量化が難しかった。
また別途、アームを上下させるモータを設けることなく、右側部または左側部のスプロケットを回転させるモータを利用してアームを回動できるため、軽量化と小形化を図ることができる。
図1は実施の形態1によるクローラ走行装置の平面図であり、図2は図1の右側面図である。
クローラ走行装置は、直進の場合は図1の矢印で示す方向に走行するので、以下の説明において、矢印の走行方向を前後方向、走行方向から見て左右を左側部、右側部と呼ぶことにする。
右側部の前後方向のスプロケット2a,2bには、クローラベルト4aが掛け渡されており、同様に、左側部の前後方向のスプロケット2c,2dには、クローラベルト4bが掛け渡されている。
モータ3aがスプロケット2aを駆動すると、クローラベルト4aを介してスプロケット2bが駆動され、さらに補助クローラベルト7aを介して補助スプロケット6aが駆動される。同様に、モータ3bの駆動力がスプロケット2dから補助クローラベルト7bを介して補助スプロケット6bに伝達されて補助スプロケット6bが駆動される。
さらに、凹凸の激しい悪路や瓦礫の上や階段等での走行の場合には、図2に示すように、アーム5の補助スプロケット6a,6bを固定状態にし、かつ基体1への固定を開放することで、基体1を軸にして回動させて持ち上げて使用する。
図3(a)の状態で、図1において下方向へ走行するように、モータ3aを駆動し、クローラ4aを介してスプロケット2bを回転させると、補助クローラベルト7aはスプロケット2b側のみが回転するので、補助スプロケット6a,6bを含むアーム5全体(以下アーム部と称する)が上方に回動する。
この場合、左右の補助スプロケット6a、6bを同時に固定しても良く、どちらか一方の補助スプロケットのみを固定してもよい。また、モータ3bの駆動によっても同様の動作を行わせることが可能である。
また、上記の固定または回転のモードを外部から無線または有線で制御する場合は、基体1に信号を受信する受信機を備えておけばよい。
なお、上記においては、アーム部に2個の補助スプロケット6a,6bを有する構造について説明したが、補助スプロケットを一つだけ有する構造としても良く、さらには、3個以上の補助スプロケットを有する構造としても良い。
本発明のクローラ走行装置は、左側部および右側部にそれぞれクローラ4a,4bを備えているため悪路においても問題なく走行可能である。操作性についても、例えば急回転したい場合は、右側部のクローラ4aと左側部のクローラ4bをそれぞれ逆回転することによりその場で回転動作を行なうことができる。また、右側部のクローラ4aと左側部のクローラ4bの回転速度を変えることにより、所望の回転半径で右左折させることもできる。これらのモータの操作は、無線または有線で送信されてきた信号を受信する受信機(図示せず)を備えることにより、遠隔操縦で行うことができる。
この撮像装置としては、例えばパンチルトカメラを用いればよい。パンチルトカメラは、上下左右に首を振って撮影方向を変更できるもので、走行装置の転倒によってカメラの位置が変化しても、撮像画像を見ながら遠隔操作によってカメラの位置を正規の姿勢に戻すことができる。このとき、重力センサーを備えておけば、転倒時においてもカメラの姿勢をただちに把握することができ、すばやい転倒復帰動作を行なうことができる。
図4〜図6は、アーム部を回動させて、スプロケット2a,2c側を先頭にして階段を上昇する様子を示したものである。図1、図2においては、補助スプロケット6a,6bの直径がスプロケット2a〜2dの直径より小さい例を示しているが、ここでは補助スプロケットの直径とスプロケットの直径が同じである例について示している。なお、スプロケットの大きさやアームの長さは、仕様に応じ適宜決定すればよい。
階段の最初の垂直面に接したクローラベルト4aは、クローラベルト4aの摩擦力により垂直面を昇り、やがて図4に示すように補助クローラベルト7aが地面に接する状態となる。
このように本発明のクローラ走行装置は、基体1とアーム部の角度を適宜制御することにより、段差の大きな階段においても容易に登って行くことができる。
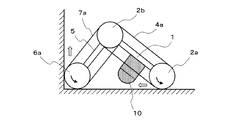
図7は、図2に比べてさらにアーム部を上方に回動させて、基体1との角度を鋭角にして固定した状態で、かつアーム部を下にして前転した状態を示している。
また、図8は、さらに前転し、補助スプロケット6aとスプロケット2aで接地している状態を示している。
なお、図7〜図9では、基体1に搭載装置10を搭載している場合を図示している。搭載装置10は、先に説明した撮像装置やその制御装置、受信機、さらにモータ制御装置等である。
またモータについても3個以上のモータを設置しても良い。例えば一つのスプロケットに対し一つのモータで駆動させる、いわゆる4輪駆動タイプにすれば、重量や容積は大きくなるが、悪路におけるさらなる走行性が必要な場合には有効である。
また別途、アームを上下させるモータを設けることなく、右側部または左側部のスプロケットを回転させるモータを利用してアームを回動できるため、軽量化と小形化を図ることができる。
図10は、実施の形態2によるクローラ走行装置を示す図であり、(a)は平面図、(b)は走行方向側から見た正面図である。実施の形態1の図1と同等部分は同一符号を付し、説明は省略する。
図1と異なる部分は、クローラベルトの幅であり、他は同じ構成である。本実施の形態のクローラベルト14aおよびクローラベルト14bは、スプロケット2a、2bまたは2c、2dと係合する一定の幅を有する部分と、それよりも幅の広い部分とで構成されている。一定の幅を有する部分を狭幅部11と称し、幅の広い部分を広幅部12と称することにする。図10では、狭幅部11が地面と接しており広幅部12が上部にあるが、もちろん、回転することにより位置関係は変動する。
また、別の実施例として、図12に示すように、大部分が狭幅部11で,一部のみに突出部を設けて広幅部12としても良い。図12は展開図であり、これを環状に繋いでスプロケットに装着する。
クローラベルトは、転倒時でも本体加重により大きな変形を生じない程度の剛性のある素材で形成しておく。このクローラベルトを装着したクローラ走行装置が横転した場合、図13または図14に示すように、地面に対する鉛直線とある傾斜角θを形成することになる。
なお、横転とは、一方のクローラ部を下に、他方のクローラ部を上にし、ほぼ90度横に回転した状態を言う。
図13は、図11の形状のクローラベルトを使用した場合であり、図14は、図12の形状のクローラベルトを使用した場合である。なお、両図とも、広幅部12が正常の状態で上面側の位置にある状態、すなわち傾斜が一番大きい場合を走行方向から見たところを示しているが、クローラベルトの回転によりこの角度は変化する。
発明者らの実験によれば、まったく傾斜角がゼロの場合(クローラベルトが等幅の場合)であっても、モータのパワーがある程度大きければ、クローラベルトが全面において接地している場合には、単に、勢い良くクローラベルトを回転させることにより、地面のちょっとした凹凸により装置が振れて正規の状態に復帰することもしばしば経験している。しかしながら、この場合は大きなパワーのモータを使用しなくてはならず、また、路面の状態によっては確実に復帰させられるとは限らない、等の問題がある。
すなわち、横転時に、6度未満の傾斜角を有するようにクローラベルトの形状を設計したものは、確実にどのような路面においても復帰させるためには相当にパワーのあるモータを使用する必要があり、そのときは本発明の目的である小形・軽量性が失われることになる。一方、18度以上の傾斜角については、多くの場合、装置全体の重心が横転時に支点から外れるか、またはそれに近い状態になるために、容易に復帰するので、それ以上の角度を持たせることはクローラベルトが大きくなるだけであまり意味がない。
図16は、実施の形態3によるクローラ走行装置の平面図である。実施の形態1の図1と同等部分は同一符号で示して説明は省略し、相違点のみを説明する。
相違点は、補助クローラベルト7a、7bがクローラベルト4a、4bの外側に設置されている点である。
このような構成によれば、先に図9において説明したように、アーム部の長さを、本体クローラ部の長さよりも長くした場合には、アーム部の回動可能な範囲を拡大することができる。
なお、図16の構成の場合は、横転防止のためにクローラベルトを狭幅部と広幅部とを設ける形状とするときは、補助クローラベルト7a、7bに設けることにより効果が発揮される。
図17は実施の形態4によるクローラ走行装置の側面図であり、実施の形態1の図2と対応する図である。図2と同等部分は同一符号で示し、説明は省略する。
相違点は、アームが基体1の前後にそれじれ備えている点である。後方部のアーム5に対し、前方部にも同様にアーム5が回動自在に設けられ、アーム5の先端側には補助スプロケット6aを有し、補助クローラベルト7aを備えて構成されている。
さらに、前転時の復帰においても壁等の利用なしに復帰できる、転倒時の復帰性能の優れたクローラ装置を提供できる。
3a,3b モータ 4a,4b クローラベルト
5 アーム 6a,6b 補助スプロケット
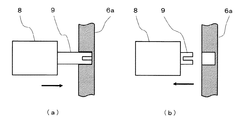
7a,7b 補助クローラベルト 8 ソレノイド装置
9 ピン 10 搭載装置
11 狭幅部 12 広幅部
13 突起部 14a,14b クローラベルト。
Claims (13)
- 基体と、前記基体の左側部および右側部の各側部の前後方向に配設された複数個のスプロケットと、前記基体に設置されて前記スプロケットを駆動するモータと、前記前後方向の前記スプロケットに掛け渡された左右2個のクローラベルトと、前記基体の前後方向の端部に一端側が回動自在に取付けられたアームと、前記アームの他端側に軸着されて回転および固定の制御が可能な補助スプロケットと、前記基体の前記アーム側に位置する前記スプロケットと前記補助スプロケットとの間に掛け渡された補助クローラベルトとを備え、
前記モータの駆動力が前記補助クローラベルトを介して前記補助スプロケットに伝達され、前記補助スプロケットの前記回転および固定の制御により、前記アームが上下方向に回動するように構成されたことを特徴とするクローラ走行装置。 - 請求項1に記載のクローラ走行装置において、前記モータは、前記左側部のスプロケットに動力を供給するモータと、前記右側部のスプロケットに動力を供給するモータとが個別に設けられていることを特徴とするクローラ走行装置。
- 請求項2に記載のクローラ走行装置において、前記左側部のスプロケットと前記右側部のスプロケットとが逆方向に回転可能なように構成されていることを特徴とするクローラ走行装置。
- 請求項2又は請求項3に記載のクローラ走行装置において、前記左側部のスプロケットと前記右側部のスプロケットの回転速度を、個別に制御可能に構成されていることを特徴とする請求項2に記載のクローラ走行装置。
- 請求項1〜請求項4のいずれか1項に記載のクローラ走行装置において、前記モータの制御を、外部から無線または有線で行うための信号を受信する受信機を備えたことを特徴とするクローラ走行装置。
- 請求項1〜請求項5のいずれか1項に記載のクローラ走行装置において、外部から無線または有線で制御可能なカメラを備えた撮像装置が基体に設置されていることを特徴とするクローラ走行装置。
- 請求項1〜請求項6のいずれか1項に記載のクローラ走行装置において、前記補助スプロケットの前記固定または回転の制御を外部から無線または有線で行うための信号を受信する受信機を備えたことを特徴とするクローラ走行装置。
- 請求項1〜請求項7のいずれか1項に記載のクローラ走行装置において、前記クローラベルトを掛け渡した前後方向の前記スプロケットの軸間距離より、前記補助クローラベルトを掛け渡した前記スプロケットと前記補助スプロケットとの軸間距離の方が長いことを特徴とするクローラ走行装置。
- 請求項1〜請求項8のいずれか1項に記載のクローラ走行装置において、前記左側部または前記右側部の少なくとも一方の前記クローラベルトのベルト幅は、狭幅部と広幅部とを有し、
クローラ走行装置が平坦地で横転し、前記狭幅部と前記広幅部において接地したとき、走行方向から見て、スプロケット軸が鉛直線に対して傾斜角を有する状態が発生するように構成したことを特徴とするクローラ走行装置。 - 請求項9に記載のクローラ走行装置において、前記狭幅部と前記広幅部とを有する前記クローラベルトの形状は、前記クローラベルトを前記スプロケットに巻き掛けた状態において、幅方向の外側の面が、前記クローラベルトの長手方向に並行で、且つ、地面とは傾斜角を有する面でカットした形状に形成されていることを特徴とするクローラ走行装置。
- 請求項9に記載のクローラ走行装置において、前記広幅部は、前記狭幅部の外側の一部に突出部を設けて形成されていることを特徴とするクローラ走行装置。
- 請求項1〜請求項8のいずれか1項に記載のクローラ走行装置において、前後方向の前記スプロケットの少なくとも一つに突起部を設け、横転時に前記突起部が接地したときに、走行方向から見て、スプロケット軸が鉛直線に対して傾斜角を有する状態となることを特徴とするクローラ走行装置。
- 請求項9〜請求項12のいずれか1項に記載のクローラ走行装置において、前記傾斜角は6度から18度の範囲であることを特徴とするクローラ走行装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162172A JP5121594B2 (ja) | 2008-06-20 | 2008-06-20 | クローラ走行装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162172A JP5121594B2 (ja) | 2008-06-20 | 2008-06-20 | クローラ走行装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010000945A true JP2010000945A (ja) | 2010-01-07 |
| JP5121594B2 JP5121594B2 (ja) | 2013-01-16 |
Family
ID=41583021
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008162172A Expired - Fee Related JP5121594B2 (ja) | 2008-06-20 | 2008-06-20 | クローラ走行装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5121594B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012236507A (ja) * | 2011-05-12 | 2012-12-06 | Chiba Inst Of Technology | 無人走行用移動体 |
| JP2018039074A (ja) * | 2016-09-07 | 2018-03-15 | 学校法人千葉工業大学 | 建築物の天井裏点検方法 |
| CN108163069A (zh) * | 2017-12-29 | 2018-06-15 | 湖南三快而居住宅工业有限公司 | 机器人、工作设备及机器人的工作方法 |
| CN110271617A (zh) * | 2019-06-24 | 2019-09-24 | 广西科技大学 | 一种两节式履带爬壁机器人 |
| CN113954980A (zh) * | 2021-11-05 | 2022-01-21 | 中国科学技术大学 | 一种可变角度的多功能推板 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111055937A (zh) * | 2019-12-30 | 2020-04-24 | 合肥工业大学 | 一种新型的履带机器人 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB541253A (en) * | 1940-06-10 | 1941-11-19 | Alfred Edward Carr | Improvements in tractor type vehicles especially applicable to military tanks |
| JPS5750014A (en) * | 1980-09-10 | 1982-03-24 | Toshiba Corp | Mobile monitoring device |
| JPS61180885U (ja) * | 1985-05-01 | 1986-11-11 | ||
| JPS6236885U (ja) * | 1985-08-20 | 1987-03-04 | ||
| JPS6390484A (ja) * | 1986-10-03 | 1988-04-21 | Hitachi Ltd | 壁面吸着走行機 |
| JP2004188581A (ja) * | 2002-11-26 | 2004-07-08 | Yoshiaki Okamoto | 救助ロボット |
| JP2005081447A (ja) * | 2003-09-04 | 2005-03-31 | Tech Res & Dev Inst Of Japan Def Agency | 走行型ロボット |
| WO2008090946A1 (ja) * | 2007-01-25 | 2008-07-31 | Topy Kogyo Kabushiki Kaisha | クローラ装置とその自動姿勢制御 |
-
2008
- 2008-06-20 JP JP2008162172A patent/JP5121594B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB541253A (en) * | 1940-06-10 | 1941-11-19 | Alfred Edward Carr | Improvements in tractor type vehicles especially applicable to military tanks |
| JPS5750014A (en) * | 1980-09-10 | 1982-03-24 | Toshiba Corp | Mobile monitoring device |
| JPS61180885U (ja) * | 1985-05-01 | 1986-11-11 | ||
| JPS6236885U (ja) * | 1985-08-20 | 1987-03-04 | ||
| JPS6390484A (ja) * | 1986-10-03 | 1988-04-21 | Hitachi Ltd | 壁面吸着走行機 |
| JP2004188581A (ja) * | 2002-11-26 | 2004-07-08 | Yoshiaki Okamoto | 救助ロボット |
| JP2005081447A (ja) * | 2003-09-04 | 2005-03-31 | Tech Res & Dev Inst Of Japan Def Agency | 走行型ロボット |
| WO2008090946A1 (ja) * | 2007-01-25 | 2008-07-31 | Topy Kogyo Kabushiki Kaisha | クローラ装置とその自動姿勢制御 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012236507A (ja) * | 2011-05-12 | 2012-12-06 | Chiba Inst Of Technology | 無人走行用移動体 |
| JP2018039074A (ja) * | 2016-09-07 | 2018-03-15 | 学校法人千葉工業大学 | 建築物の天井裏点検方法 |
| CN108163069A (zh) * | 2017-12-29 | 2018-06-15 | 湖南三快而居住宅工业有限公司 | 机器人、工作设备及机器人的工作方法 |
| CN110271617A (zh) * | 2019-06-24 | 2019-09-24 | 广西科技大学 | 一种两节式履带爬壁机器人 |
| CN113954980A (zh) * | 2021-11-05 | 2022-01-21 | 中国科学技术大学 | 一种可变角度的多功能推板 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5121594B2 (ja) | 2013-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5121594B2 (ja) | クローラ走行装置 | |
| JP4607442B2 (ja) | クローラ型走行ロボット | |
| CN211073605U (zh) | 将传感器模块安装到无人地面车辆 | |
| US9216781B2 (en) | Maneuvering robotic vehicles | |
| US8333256B2 (en) | Polymorphic tracked vehicle | |
| US8365848B2 (en) | Robotic platform | |
| US8122982B2 (en) | Mobile robot systems and methods | |
| US7493976B2 (en) | Variable configuration articulated tracked vehicle | |
| KR101109545B1 (ko) | 가변트랙형 이동시스템 | |
| JPH09142347A (ja) | 不整地移動装置 | |
| KR101094740B1 (ko) | 이동로봇 | |
| JP7115404B2 (ja) | 無人探査車 | |
| JP2017218105A (ja) | 履帯式走行体 | |
| US20230047500A1 (en) | Inclination control system for tracked vehicle | |
| JP2008126936A (ja) | 移動装置 | |
| JP6239981B2 (ja) | 走行車両および作業車両 | |
| CN118770415A (zh) | 一种能跨越障碍物的电力巡检机器人 | |
| JP2005334355A (ja) | 小型走行台車及び小型走行ロボット | |
| KR20250059698A (ko) | 플리퍼를 구비한 트랙형 로봇 및 이의 제어방법 | |
| JP2017065565A (ja) | 走行装置 | |
| KR101887283B1 (ko) | 플랫폼 진동 저감을 위한 무인 로봇 | |
| KR20200072032A (ko) | 지상 이동체 및 그의 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110304 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120801 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120831 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121023 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5121594 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |