JP2009208523A - Electric brake booster - Google Patents
Electric brake booster Download PDFInfo
- Publication number
- JP2009208523A JP2009208523A JP2008051443A JP2008051443A JP2009208523A JP 2009208523 A JP2009208523 A JP 2009208523A JP 2008051443 A JP2008051443 A JP 2008051443A JP 2008051443 A JP2008051443 A JP 2008051443A JP 2009208523 A JP2009208523 A JP 2009208523A
- Authority
- JP
- Japan
- Prior art keywords
- piston
- electric motor
- brake
- electric
- brake booster
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Abstract
Description
本発明は、ブレーキアシスト力を付与する電動ブレーキ倍力装置に関する。 The present invention relates to an electric brake booster that applies a brake assist force.
この種の技術としては、特許文献1に記載の技術が開示されている。この公報では、プッシュロッドに押圧力が作用すると、電動機によってブーストピストンを移動させてブレーキ液圧を発生させるものが開示されている。また、電動機が動かないときには、プッシュロッドと一体に摺動する主ピストンが所定量ストロークすると、主ピストンとブーストピストンとが当接して、ブーストピストンをストロークさせるようにしている。
しかしながら、上記従来技術では、ストロークセンサに異常を検出した場合主ピストンとブーストピストンとが当接するまで、主ピストンが所定量ストロークする必要があるため、ブレーキ液圧が立ち上がるまでに時間を要する問題があった。 However, in the above prior art, when an abnormality is detected in the stroke sensor, the main piston needs to stroke a predetermined amount until the main piston and the boost piston come into contact with each other, and thus there is a problem that it takes time until the brake hydraulic pressure rises. there were.
本発明は上記問題に着目してなされたもので、その目的とするところは、主ピストンとブーストピストンとを連結によって、ブレーキ液圧の立ち上がりを迅速に行える電動ブレーキ倍力装置を提供することである。 The present invention has been made paying attention to the above problems, and the object of the present invention is to provide an electric brake booster capable of quickly raising the brake fluid pressure by connecting the main piston and the boost piston. is there.
上記目的を達成するため、本発明においては、所定の条件のときに連結機構により第1ピストンと第2ピストンとを連結するようにした。 In order to achieve the above object, in the present invention, the first piston and the second piston are coupled by a coupling mechanism under a predetermined condition.
そのためストロークセンサに異常を検出した場合、操作力伝達部材とアシスト力伝達部材とを連結することによって、ブレーキ液をホイールシリンダ側に送り、ブレーキ液圧の立ち上がりを早くできる。 Therefore, when an abnormality is detected in the stroke sensor, the brake fluid can be sent to the wheel cylinder side by connecting the operating force transmission member and the assist force transmission member, so that the rise of the brake fluid pressure can be accelerated.
以下、本発明の電動ブレーキ倍力装置を実現する最良の形態を、実施例1ないし実施例3に基づいて説明する。 Hereinafter, the best mode for realizing the electric brake booster of the present invention will be described based on Examples 1 to 3.
実施例1の電動ブレーキ倍力装置1は、運転者のブレーキ操作に応じて電動モータ40によりアシスト力を付与するとともに、運転者のブレーキ操作に関わらず自動ブレーキを行うことができる装置である。
The electric brake booster 1 according to the first embodiment is an apparatus that can apply an assist force by the
[電動ブレーキ倍力装置の構成]
図1は、電動ブレーキ倍力装置1のシステム図である。電動ブレーキ倍力装置1は、マスタシリンダ2と、運転者がブレーキペダル7に入力したブレーキ操作力を、このマスタシリンダ2内のブレーキ液に伝達する第1ピストン8と、電動モータ40のブレーキアシスト力を伝達する第2ピストン9とを備えている。
[Configuration of electric brake booster]
FIG. 1 is a system diagram of the electric brake booster 1. The electric brake booster 1 includes a
第1ピストン8は、ブレーキペダル7と接続するプッシュロッド80と、このプッシュロッド80と接続する主ピストン81とを有している。第2ピストン9は、電動モータ40と接続する電動モータ接続軸90と、ブレーキが作動していない状態において、電動モータ接続軸90のマスタシリンダ2側端面と当接するブーストピストン91とを有している。
The
主ピストン81は、マスタシリンダ2側に小径部81aと、プッシュロッド80側に大径部81bとを有している。電動モータ接続軸90およびブーストピストン91は中空部を有している。また、電動モータ接続軸90のブレーキペダル7側の外周は、ボール30を回転可能に保持している。
The
主ピストン81の小径部81aは、ブーストピストン91の内周の径よりも小径であり、ブーストピストン91の中空部内に位置している。主ピストン81の大径部81bは、ブーストピストン91の内周の径よりも大径であって、電動モータ接続軸90の内周の径よりも小径である。主ピストン81の大径部81bは、電動モータ接続軸90の中空部内に位置している。ブレーキが作動していない状態において、大径部81bのマスタシリンダ2側の端面81cと、ブーストピストン91のブレーキペダル7側の端面91aとは軸方向に離間して位置している。これにより、自動ブレーキ作動時には、ブーストピストン91のみが移動し、主ピストン81、ブレーキペダル7が移動しないようにしている。
The
マスタシリンダ2は、有底のシリンダ本体20とリザーバタンク21を有している。シリンダ本体20内の奥側は、プライマリピストンとしての主ピストン81、ブーストピストン91と対を成すセカンダリピストン6を、シリンダ本体20の内壁に対して摺動可能に収装している。
The
主ピストン81、ブーストピストン91とセカンダリピストン6とは、シリンダ本体20内を2つの圧力室11,12に隔成している。主ピストン81、ブーストピストン91とセカンダリピストン6の移動に応じて、各圧力室11,12内に封じ込めているブレーキ液が油圧回路13を介して各ホイール14のホイールシリンダ15に移動する。
The
電動モータ40は、中空のDCブラシレスモータであって、ハウジング5の内壁に固定したステータ40aと、内周側にボールねじ溝40cを有するロータ40bを備えている。またレゾルバ41を設け、電動モータ40の回転位置を検出している。
The
電動モータ接続軸90、ロータ40b、ボール30によりボールねじ機構3を形成している。ボールねじ機構3は、電動モータ40が駆動すると、ロータ40bの回転力をボール30を介して電動モータ接続軸90に軸方向の推力として伝達する。またボールねじ機構3は、電動モータ接続軸90に軸方向の推力が働くと、電動モータ接続軸90の推力をボール30を介してロータ40bに回転力として伝達する。
The
主ピストン81と電動モータ接続軸90との間に、連結機構16を有している。この連結機構16は、第1ピストン8と第2ピストン9とを相対移動可能にする解放状態と、一体移動可能にする連結状態とに切り替えることができる。
A
油圧回路13には、VDCポンプ17を接続している。このVDCポンプ17は、通常は、ヴィークルダイナミックコントロール(Vehicle Dynamics Control:以下、VDC)を行うときに、マスタシリンダ2とは別にブレーキ液圧を発生させるポンプである。
A
電動モータ40、連結機構16、VDCポンプ17は、コントロールユニット50によって制御する。このコントロールユニット50は、ブレーキストロークセンサ10からブレーキペダル7のストローク情報と、レゾルバ41から電動モータ40の回転位置情報とを入力し、これらの情報から各装置に指令信号を出力する。
The
図2は連結機構16の拡大図である。連結機構16は、ラッチ16aと、磁石16bと、コイル16cと、バネ16dとから構成している。
ラッチ16aは、電動モータ接続軸90に設けたラッチ溝90aに係合可能に形成している。バネ16dは、ラッチ16aをラッチ溝90aと係合する方向に付勢している。磁石16bは、ラッチ16aをラッチ溝90aから離間する位置に吸引している。
FIG. 2 is an enlarged view of the
The
コイル16cの非通電時には、図2(a)に示すように、バネ16dによるラッチ16aへの付勢力に対して、磁石16bによるラッチ16aの吸引力を強く設定する。そのため、コイル16cの非通電時にはラッチ16aとラッチ溝90aとは非係合状態となる。
When the
コイル16cは、通電すると磁石16bの磁力を打ち消す方向に磁力を発生する。コイル16cの通電時には、図2(b)にしめすように、磁石16bがラッチ16aを吸引する力が低下し、バネ16dによるラッチ16aへの付勢力に対して、磁石16bによるラッチ16aの吸引力を弱くなるように設定している。そのため、コイル16cの通電時にはラッチ16aとラッチ溝90aとは係合状態となる。
When energized, the
図3はコントロールユニット50の制御ブロック図である。コントロールユニット50は、電動モータ制御部50aと、ブレーキストロークセンサ異常検出部50bと、連結機構制御部50cと、VDCポンプ制御部50dとを有する。
FIG. 3 is a control block diagram of the
電動モータ制御部50aは、ブレーキストロークセンサ10からブレーキストローク情報とレゾルバ41から電動モータ40の回転位置情報を入力する。このブレーキストローク情報と電動モータ40の回転位置情報に基づいて電動モータ40の指令信号を演算し、演算した指令信号を電動モータ40に出力する。
The electric
ブレーキストロークセンサ異常検出部50bは、ブレーキストロークセンサ10のセンサ値を入力する。そして、ブレーキストロークセンサ10の異常検出を行い、この検出結果を連結機構制御部50cに出力する。なお、異常検出の具体例としては、例えば、センサ信号の上張り付き検知や、下張り付き検知、もしくは、他のセンサとの整合性判断によって実行されるものであり、特に限定しない。
The brake stroke sensor
連結機構制御部50cは、ブレーキストロークセンサ異常検出部50bの検出結果を入力する。ブレーキストロークセンサ10が異常であるときには、連結機構16を連結する指令信号を連結機構16に出力する。
The connection
VDCポンプ制御部50dは、レゾルバ41から電動モータ40の回転位置情報を入力する。この回転位置情報に基づいてVDCポンプの指令信号を演算し、演算した指令信号をVDCポンプ17に出力する。
The VDC
[電動ブレーキ倍力制御処理]
次に、コントロールユニット50の制御処理の流れについて説明する。図4は、コントロールユニット50の制御処理の流れを示すフローチャートである。
[Electric brake boost control process]
Next, the flow of control processing of the
ステップS1では、ブレーキストロークセンサ10からブレーキストローク情報を入力して、ステップS2へ移行する。
ステップS2では、レゾルバ41から電動モータ40の回転位置情報を入力してステップS3へ移行する。
In step S1, brake stroke information is input from the
In step S2, the rotational position information of the
ステップS3では、ブレーキストローク情報と電動モータ40の回転位置情報とに基づいて電動モータ40を駆動する指令信号を演算して、ステップS4へ移行する。
ステップS4では、電動モータ40に指令信号を出力して、ステップS5へ移行する。
ステップS5では、ブレーキストロークセンサ10の異常判定を行い、ステップS6へ移行する。
In step S3, a command signal for driving the
In step S4, a command signal is output to the
In step S5, abnormality determination of the
ステップS6では、ブレーキストロークセンサ10に異常が発生しているか否かを判断し、異常が発生している場合にはステップS7へ移行し、異常が発生していない場合にはリターンへ移行する。
ステップS7では、連結機構16に連結を行う指令信号を出力して、ステップS8へ移行する。
In step S6, it is determined whether or not an abnormality has occurred in the
In step S7, a command signal for coupling to the
ステップS8では、レゾルバ41から電動モータ40の回転位置情報を入力して、ステップS9へ移行する。
ステップS9では、電動モータ40の回転位置情報に基づいて、VDCポンプ17を駆動する指令信号を演算して、ステップS10へ移行する。
ステップS10では、VDCポンプ17に指令信号を出力して、リターンへ移行する。
In step S8, the rotational position information of the
In step S9, a command signal for driving the
In step S10, a command signal is output to the
[電動ブレーキ倍力制御作用]
次に、電動ブレーキ倍力装置1の制御の作用について説明する。
[Electric brake boost control]
Next, the control action of the electric brake booster 1 will be described.
(ブレーキストロークセンサ正常時)
ブレーキストロークセンサ10が正常であるときには、図4のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS6→リターンへと移行する。
(When brake stroke sensor is normal)
When the
図5は、ブレーキストロークセンサ10が正常であるときの電動ブレーキ倍力装置1の動作を示す図である。図5は、第1ピストン8、第2ピストン9および電動モータ40の部分の拡大図であって、軸線に対して上方のみを記載している。図5(a)はブレーキペダル7がストロークする前の状態を示し、図5(b)はブレーキペダル7がストロークした状態を示す。
FIG. 5 is a diagram illustrating the operation of the electric brake booster 1 when the
ステップS3において、ブレーキストロークセンサ10からのブレーキストローク情報とレゾルバ41からの電動モータ40の回転位置情報とに基づいて電動モータ40を駆動する。そのため、図5(b)に示すように電動モータ40から電動モータ接続軸90へ推力を伝達し、電動モータ接続軸90がブーストピストン91を押圧する。これにより、運転者のブレーキ操作力に対してアシスト力を付与することができる。
In step S <b> 3, the
(ブレーキストロークセンサ異常時)
ブレーキストロークセンサ10が異常であるときの電動ブレーキ倍力装置1の動作とホイールシリンダ15のブレーキ液圧について説明する。
(When the brake stroke sensor is abnormal)
The operation of the electric brake booster 1 and the brake fluid pressure of the
図6は、連結機構16を有しない電動ブレーキ倍力装置1の動作を示す図である。図6は、第1ピストン8、第2ピストン9および電動モータ40の部分の拡大図であって、軸線に対して上方のみを記載している。図6(a)はブレーキペダル7がストロークする前の状態を示し、図6(b)はブレーキペダル7がストロークした状態を示す。
FIG. 6 is a diagram illustrating the operation of the electric brake booster 1 that does not include the
ブレーキストロークセンサ10が異常であるときには、電動モータ40を駆動する指令信号を演算することができない。よって、電動モータ40への指令信号が出力されず、電動モータ40は駆動しない。電動モータ40から電動モータ接続軸90へ推力が伝達されず、電動モータ接続軸90がブーストピストン91を押圧できないため、ブーストピストン91は移動しない。
When the
主ピストン81がブーストピストン91側に相対移動すると、主ピストン81の端面81cとブーストピストン91の端面91aとが当接し、主ピストン81とブーストピストン91を一体移動することが可能である。
When the
ここで、図6(a)に示すようにブレーキが作動していない状態において、主ピストン81の端面81cとブーストピストン91の端面91aとは軸方向に離間して配置している。そのため、図6(b)に示すように、主ピストン81の端面81cとブーストピストン91の端面91aとが当接するまでブーストピストン91は移動しない。すなわち主ピストン81のみが移動している間は、ホイールシリンダ15側に十分なブレーキ液を供給することができず、ブレーキ液圧が立ち上がらない。
Here, as shown in FIG. 6A, the
したがって、ブレーキストロークセンサ10が正常であるときに比べて異常であるときには、ブレーキ液圧の立ち上がりが遅くなるといった問題があった。
また、電動モータ40が駆動しないため、ブレーキアシスト力を付与することができないといった問題があった。
Therefore, when the
Further, since the
そこで実施例1では、ブレーキ液圧の立ち上がりが遅くなるという問題に対して、連結機構16を設け、ブレーキストロークセンサ10に異常が発生している場合には、連結機構16によって第1ピストン8と第2ピストン9とを一体移動可能に連結するようにした。
Therefore, in the first embodiment, the
また実施例1では、ブレーキアシスト力を付与することができないという問題に対して、電動モータ40のレゾルバ41が検出する電動モータ40の回転位置情報に基づいて、VDCポンプ17を駆動してブレーキ液圧を発生させるようにした。
Further, in the first embodiment, in response to the problem that the brake assist force cannot be applied, the
ブレーキストロークセンサ10に異常が発生している場合には、図4のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS6→ステップS7へと移行する。
If an abnormality has occurred in the
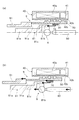
図7は、実施例1の電動ブレーキ倍力装置1の動作を示す図である。図7は、第1ピストン8、第2ピストン9および電動モータ40の部分の拡大図であって、軸線に対して上方のみを記載している。図7(a)はブレーキペダル7がストロークする前の状態を示し、図7(b)はブレーキペダル7がストロークした状態を示す。
FIG. 7 is a diagram illustrating the operation of the electric brake booster 1 according to the first embodiment. FIG. 7 is an enlarged view of portions of the
ステップS6において、ブレーキストロークセンサ10に異常が発生したと判断すると、図7(a)に示すようにステップS7において連結機構16を締結する。この状態でブレーキペダル7がストロークすると、図7(b)に示すように推力は、プッシュロッド80→主ピストン81→連結機構16→電動モータ接続軸90→ブーストピストン91の順で伝達し、第1ピストン8と第2ピストン9とは一体に移動する。
If it is determined in step S6 that an abnormality has occurred in the
ステップS7に続いて、ステップS8→ステップS9→ステップS10→RETURNへと移行する。
ステップS7において、連結機構16を締結しているため、主ピストン81と電動モータ接続軸90とが一体に移動する。電動モータ40のロータ40b、電動モータ接続軸90およびボール30はボールねじ機構3を構成するため、主ピストン81から電動モータ接続軸90に推力が作用すると、ロータ40bは電動モータ接続軸90の移動に応じて回転する。そのとき、レゾルバ41は電動モータ40の回転位置を検出することができる。ステップS8で入力した電動モータ40の回転位置の変化量から、ブレーキペダル7のブレーキストローク量を求める。ここで求めたブレーキストローク量に応じて、ステップS9においてVDCポンプ17の指令信号を演算し、ステップS10においてVDCポンプ17へ指令信号を出力する。
Subsequent to step S7, the process proceeds from step S8 to step S9 to step S10 to RETURN.
In step S7, since the
図8は、ホイールシリンダ15におけるブレーキ液圧の時間変化を示すタイムチャートである。図8の細実線は、ブレーキストロークセンサ10が正常なときのブレーキ液圧の時間変化を示す。図8の太実線は、ブレーキストロークセンサ10が異常であるときに、連結機構16を連結するとともに、VDCポンプ17を駆動したときのブレーキ液圧の時間変化を示す。図8の点線は、連結機構16を有しない電動ブレーキ倍力装置1において、ブレーキストロークセンサ10が異常であるときのブレーキ液圧の時間変化を示す。
FIG. 8 is a time chart showing the time change of the brake fluid pressure in the
図8に示すように、連結機構16を有しない電動ブレーキ倍力装置1においては、ブレーキストロークセンサ10が異常であるときには、正常であるときに比べてブレーキ液圧の立ち上がりが遅れる。また、ブレーキストロークセンサ10が異常であるときには、電動モータ40が駆動しないため、アシスト力が作用せず、正常であるときに比べてブレーキ液圧が低くなる。
As shown in FIG. 8, in the electric brake booster 1 that does not have the
これに対し、図8に示すように、実施例1の電動ブレーキ倍力装置1においては、ブレーキストロークセンサ10が異常であるときには、正常であるときと比べてもブレーキ液圧の立ち上がりは十分に早くすることができる。また、実施例1の電動ブレーキ倍力装置1においても、ブレーキストロークセンサ10が異常であるときには電動モータ40は駆動しないが、VDCポンプ17によってブレーキ液圧を発生させるために、正常であるときに比べても十分に高いブレーキ液圧を確保することができる。
On the other hand, as shown in FIG. 8, in the electric brake booster 1 of the first embodiment, when the
[実施例1の効果]
次に実施例1の効果について、以下に列記する。
[Effect of Example 1]
Next, effects of Example 1 are listed below.
(1)ブレーキペダル7に連結された第1ピストン8と、電動モータ40により推力を発生する第2ピストン9と、第1ピストン8および/または第2ピストン9の作動により液圧を発生させるマスタシリンダ2と、第1ピストン8と第2ピストン9とを一体移動可能に連結可能な連結機構16と、所定の条件のときに連結機構16を連結する連結機構制御部50cと、を設けた。
(1) The
よって、第1ピストン8と第2ピストン9とは一体移動することが可能となり、主ピストン81とブーストピストン91によって、ホイールシリンダ15側にブレーキ液を供給することが可能となる。したがって、主ピストン81のみによるブレーキ液の供給に比べて、主ピストン81とブーストピストン91によるブレーキ液圧の供給は多くなり、ブレーキ液圧の立ち上がりを、主ピストン81のみが移動する場合に比べて早くすることができる。
Therefore, the
(2)ブレーキペダル7のストローク量を検出するブレーキストロークセンサ10と、ストローク量に応じて、電動モータ40を制御する電動モータ制御部50aと、ブレーキストロークセンサ10の異常状態を検出するブレーキストロークセンサ異常検出部50bと、を設け、連結機構制御部50cは、ブレーキストロークセンサ10の異常状態を検出したときに連結機構16を連結するようにした。
(2) A
よって、ブレーキストロークセンサ10が異常状態であって、電動モータ40が駆動しないときであっても、第1ピストン8と第2ピストン9とを一体移動することが可能となる。したがって、主ピストン81とブーストピストン91によって、ホイールシリンダ15側にブレーキ液を供給することが可能となる。そのため、主ピストン81のみによるブレーキ液の供給に比べて、主ピストン81とブーストピストン91によるブレーキ液圧の供給は多くなり、ブレーキ液圧の立ち上がりを、電動モータ40が駆動するときと同程度に早くすることができる。
Therefore, even when the
(3)第1ピストン8は、ブレーキペダル7からの操作力を入力するプッシュロッド80と、プッシュロッド80に連結する主ピストン81とを有し、第2ピストン9は、電動モータ40と接続する電動モータ接続軸90と、電動モータ接続軸90から推力を伝達されるブーストピストン91とを有し、連結機構16は、主ピストン81と電動モータ接続軸90との間を連結可能とした。
(3) The
よって、主ピストン81から電動モータ接続軸90を介してブーストピストン91に推力を伝達することが可能となる。そのため、主ピストン81とブーストピストン91によって、ホイールシリンダ15側にブレーキ液を供給することが可能となり、ブレーキ液圧の立ち上がりを電動モータ40が駆動するときと同程度に早くすることができる。
Therefore, it becomes possible to transmit thrust from the
(4)電動モータ40と電動モータ接続軸90との間に、電動モータ接続軸90に作用する力を電動モータ40へ伝達可能なボールねじ機構3と、電動モータ40の回転位置を検出するレゾルバ40と、ブレーキ液圧を発生するVDCポンプ17と、異常状態を検出したときは、電動モータ40の回転位置に応じてVDCポンプ17を駆動するVDCポンプ制御部50dとを設けた。
(4) Between the
よって、運転者の操作力によるマスタシリンダ2で発生するブレーキ液圧に加えて、VDCポンプ17で発生するブレーキ液圧をホイールシリンダ15に圧送することが可能となる。そのため、ホイールシリンダ15のブレーキ液圧を電動モータ40が駆動するときと同程度に高くすることができる。
Therefore, in addition to the brake hydraulic pressure generated in the
(5)マスタシリンダ2の、ブレーキペダル7に連結された第1ピストン8と、電動モータ40により推力を発生する第2ピストン8とを所定の条件のときに一体移動するようにした。
(5) The
よって、ブレーキストロークセンサ10が異常である場合に電動モータ40が駆動しないときであっても、第1ピストン8と第2ピストン9とは一体移動することが可能となる。そのため、主ピストン81とブーストピストン91によって、ホイールシリンダ15側にブレーキ液を供給することが可能となる。したがって、主ピストン81のみによるブレーキ液の供給に比べて、主ピストン81とブーストピストン91によるブレーキ液圧の供給は多くなり、ブレーキ液圧の立ち上がりを電動モータ40が駆動するときと同程度に早くすることができる。
Therefore, even when the
次に、実施例2の電動ブレーキ倍力装置1について説明する。以下では、実施例1と同じ構成については、同一の符号を付して説明を省略する。 Next, the electric brake booster 1 according to the second embodiment will be described. In the following, the same components as those in the first embodiment are denoted by the same reference numerals, and description thereof is omitted.
[電動ブレーキ倍力装置の構成]
図9は、実施例2の電動ブレーキ倍力装置1のシステム図である。連結機構16は、実施例1では主ピストン81と電動モータ接続軸90とを連結していたが、実施例2では連結機構16は、主ピストン81とブーストピストン91とを連結するようにした。また、ブレーキストロークセンサ10が異常であるときには、実施例1ではレゾルバ41からの電動モータ40の回転位置情報に応じてVDCポンプ17を制御していたが、実施例2ではマスタシリンダ圧センサ22からのマスタシリンダ圧情報に応じてVDCポンプ17を制御するようにした。
[Configuration of electric brake booster]
FIG. 9 is a system diagram of the electric brake booster 1 according to the second embodiment. The
主ピストン81とブーストピストン91との間に、連結機構16を有している。この連結機構16は、主ピストン81とブーストピストン91とを相対移動可能にする解放状態と、一体移動可能にする連結状態とを切り替えることができる。
また、マスタシリンダ2は、マスタシリンダ圧を検出するマスタシリンダ圧センサ22を有している。
A connecting
The
図10はコントロールユニット50の制御ブロック図である。コントロールユニット50は、電動モータ制御部50aと、ブレーキストロークセンサ異常検出部50bと、連結機構制御部50cと、VDCポンプ制御部50dとを有している。
FIG. 10 is a control block diagram of the
電動モータ制御部50aは、ブレーキストロークセンサ10からブレーキストローク情報とレゾルバ41から電動モータ40の回転位置情報を入力する。これらの情報に基づいて電動モータ40の指令信号を演算し、演算した指令信号を電動モータ40に出力する。
The electric
ブレーキストロークセンサ異常検出部50bは、ブレーキストロークセンサ10のセンサ値を入力する。そして、ブレーキストロークセンサ10の異常検出を行い、この検出結果を連結機構制御部50cに出力する。なお、異常検出の具体例としては、例えば、センサ信号の上張り付き検知や、下張り付き検知、もしくは、他のセンサとの整合性判断によって実行されるものであり、特に限定しない。
The brake stroke sensor
連結機構制御部50cは、ブレーキストロークセンサ異常検出部50bの検出結果を入力する。ブレーキストロークセンサ10が異常であるときには、連結機構16を連結するように指令信号を出力する。
The connection
VDCポンプ制御部50dは、マスタシリンダ圧センサ22からマスタシリンダ圧情報を入力する。このマスタシリンダ圧情報に基づいてVDCポンプの指令信号を演算し、演算した指令信号をVDCポンプ17に出力する。
The VDC
[電動ブレーキ倍力制御処理]
次に、コントロールユニット50の制御処理の流れについて説明する。図11は、コントロールユニット50の制御処理の流れを示すフローチャートである。
[Electric brake boost control process]
Next, the flow of control processing of the
ステップS11では、ブレーキストロークセンサ10からブレーキストローク情報を入力して、ステップS12へ移行する。
ステップS12では、レゾルバ41から電動モータ40の回転位置情報を入力してステップS13へ移行する。
In step S11, brake stroke information is input from the
In step S12, the rotational position information of the
ステップS13では、ブレーキストローク情報と電動モータ40の回転位置情報とに基づいて電動モータ40を駆動する指令信号を演算して、ステップS14へ移行する。
ステップS14では、電動モータ40に指令信号を出力して、ステップS15へ移行する。
ステップS15では、ブレーキストロークセンサ10の異常判定を行い、ステップS16へ移行する。
In step S13, a command signal for driving the
In step S14, a command signal is output to the
In step S15, abnormality determination of the
ステップS16では、ブレーキストロークセンサ10に異常が発生しているか否かを判断し、異常が発生している場合にはステップS17へ移行し、異常が発生していない場合にはリターンへ移行する。
ステップS17では、連結機構16に連結を行う指令信号を出力して、ステップS18へ移行する。
In step S16, it is determined whether or not an abnormality has occurred in the
In step S17, a command signal for coupling to the
ステップS18では、マスタシリンダ圧センサ22からマスタシリンダ圧情報を入力して、ステップS19へ移行する。
ステップS19では、マスタシリンダ圧情報に基づいて、VDCポンプ17を駆動する指令信号を演算して、ステップS20へ移行する。
ステップS20では、VDCポンプ17に指令信号を出力して、リターンへ移行する。
In step S18, master cylinder pressure information is input from the master
In step S19, a command signal for driving the
In step S20, a command signal is output to the
[電動ブレーキ倍力制御作用]
次に、電動ブレーキ倍力装置1の制御の作用について説明する。
[Electric brake boost control]
Next, the control action of the electric brake booster 1 will be described.
(ブレーキストロークセンサ正常時)
ブレーキストロークセンサ10が正常であるときには、図11のフローチャートにおいて、ステップS11→ステップS12→ステップS13→ステップS14→ステップS15→ステップS16→リターンへと移行する。
(When brake stroke sensor is normal)
When the
ステップS13において、ブレーキストロークセンサ10からのブレーキストローク情報とレゾルバ41からの電動モータ40の回転位置情報に基づいて電動モータ40を駆動する。そのため、電動モータ40から電動モータ接続軸90へ推力を伝達し、電動モータ接続軸90がブーストピストン91を押圧する。これにより、運転者のブレーキ操作力に対してアシスト力を付与することができる。
In step S <b> 13, the
(ブレーキストロークセンサ異常時)
実施例1では説明したように、ブレーキストロークセンサ10が正常であるときに比べて異常であるときには、ブレーキ液圧の立ち上がりが遅くなるといった問題があった。
また、電動モータ40が駆動しないため、ブレーキアシスト力を付与することができないといった問題があった。
(When the brake stroke sensor is abnormal)
As described in the first embodiment, when the
Further, since the
そこで実施例2では、ブレーキ液圧の立ち上がりが遅くなるという問題に対して、連結機構16を設け、ブレーキストロークセンサ10に異常が発生している場合には、連結機構16によって第1ピストン8と第2ピストン9のブーストピストン91とを一体移動可能に連結するようにした。
Therefore, in the second embodiment, the
また実施例2では、ブレーキアシスト力を付与することができないという問題に対して、マスタシリンダ圧センサ22が検出するマスタシリンダ圧情報に基づいて、VDCポンプ17を駆動してブレーキ液圧を発生させるようにした。
In the second embodiment, the brake fluid pressure is generated by driving the
ブレーキストロークセンサ10に異常が発生している場合には、図11のフローチャートにおいて、ステップS11→ステップS12→ステップS13→ステップS14→ステップS15→ステップS16→ステップS17へと移行する。
If an abnormality has occurred in the
図12は、実施例2の電動ブレーキ倍力装置1の動作を示す図である。図12は、第1ピストン8、第2ピストン9および電動モータ40の部分の拡大図であって、軸線に対して上方のみを記載している。図12(a)はブレーキペダル7がストロークする前の状態を示し、図12(b)はブレーキペダル7がストロークした状態を示す。
FIG. 12 is a diagram illustrating the operation of the electric brake booster 1 according to the second embodiment. FIG. 12 is an enlarged view of portions of the
ステップS16において、ブレーキストロークセンサ10に異常が発生したと判断すると、ステップS17において図12(a)に示すように連結機構16を締結する。この状態でブレーキペダル7がストロークすると、図12(b)に示すように推力は、プッシュロッド80→主ピストン81→連結機構16→ブーストピストン91の順で伝達し、第1ピストン8とブーストピストン91とは一体に移動する。実施例2では、ブレーキペダル7からの推力は電動モータ接続軸90には伝達しないため、電動モータ接続軸90は移動しない。
If it is determined in step S16 that an abnormality has occurred in the
ステップS17に続いて、ステップS18→ステップS19→ステップS20→RETURNへと移行する。
ステップS17において、連結機構16を締結しているため、主ピストン81とブーストピストン91とが一体に移動する。主ピストン81とブーストピストン91が移動するとマスタシリンダ圧センサ22がマスタシリンダ圧を検出し、マスタシリンダ圧の変化量から、ブレーキペダル7のブレーキストローク量を求める。ここで求めたブレーキストローク量に応じて、ステップS19においてVDCポンプ17の指令信号を演算し、ステップS20においてVDCポンプ17へ指令信号を出力する。
Subsequent to step S17, the process proceeds from step S18 to step S19 to step S20 to RETURN.
In step S17, since the
これにより実施例2の電動ブレーキ倍力装置1においては、ブレーキストロークセンサ10が異常であるときには、正常であるときと比べてもブレーキ液圧の立ち上がりは十分に早くすることができる。また、実施例2の電動ブレーキ倍力装置1においても、ブレーキストロークセンサ10が異常であるときには電動モータ40は駆動しないが、VDCポンプ17によってブレーキ液圧を発生させるために、正常であるときに比べても十分に高いブレーキ液圧を確保することができる。
As a result, in the electric brake booster 1 of the second embodiment, when the
また、実施例2では、主ピストン81とブーストピストン91とを連結して一体に移動可能としているため、電動モータ接続軸90は移動しない。よって、電動モータ40は回転しないため、レゾルバ41により回転位置変化を検出することもできない。
Further, in the second embodiment, the
そこで実施例2では、マスタシリンダ圧センサ22を設け、マスタシリンダ圧情報も基づいてVDCポンプ17を制御するようにした。よって、VDCポンプ17によってブレーキ液圧を発生させるため、正常であるときに比べても十分に高いブレーキ液圧を確保することができる。
Therefore, in the second embodiment, the master
[実施例2の効果]
次に実施例2の効果について、以下に列記する。
[Effect of Example 2]
Next, effects of Example 2 are listed below.
(6)第1ピストン8は、ブレーキペダル7からの操作力を入力するプッシュロッド80と、プッシュロッド80に連結する主ピストン81とを有し、第2ピストン9は、電動モータ40と接続する電動モータ接続軸90と、電動モータ接続軸90から推力を伝達されるブーストピストン91とを有し、連結機構16は、主ピストン81とブーストピストン91とを連結可能とした。
(6) The
よって、主ピストン81からブーストピストン91に推力を伝達することが可能となる。そのため、主ピストン81とブーストピストン91によって、ホイールシリンダ15側にブレーキ液を供給することが可能となり、ブレーキ液圧の立ち上がりを電動モータ40が駆動するときと同程度に早くすることができる。
Therefore, it becomes possible to transmit thrust from the
(7)マスタシリンダ2の液圧を検出するマスタシリンダ圧センサ22と、ブレーキ液圧を発生するVDCポンプ17と、異常状態を検出したときは、マスタシリンダ2の液圧に応じてVDCポンプ17を駆動するVDCポンプ制御部50dとを設けた。
(7) A master
よって、運転者の操作力によるマスタシリンダ2で発生するブレーキ液圧に加えて、VDCポンプ17で発生するブレーキ液圧をホイールシリンダ15に圧送することが可能となる。そのため、ホイールシリンダ15のブレーキ液圧を電動モータ40が駆動するときと同程度に高くすることができる。
Therefore, in addition to the brake hydraulic pressure generated in the
次に、実施例3の電動ブレーキ倍力装置1について説明する。以下では、実施例1と同じ構成については、同一の符号を付して説明を省略する。 Next, the electric brake booster 1 according to the third embodiment will be described. In the following, the same components as those in the first embodiment are denoted by the same reference numerals, and description thereof is omitted.
[電動ブレーキ倍力装置の構成]
図13は、実施例3の電動ブレーキ倍力装置1の構成図である。図13は、第1ピストン8、第2ピストン9および電動モータ40の部分の拡大図であって、軸線に対して上方のみを記載している。
[Configuration of electric brake booster]
FIG. 13 is a configuration diagram of the electric brake booster 1 according to the third embodiment. FIG. 13 is an enlarged view of portions of the
連結機構16は、実施例1では主ピストン81と電動モータ接続軸90とを連結していたが、実施例2では連結機構16は、電動モータ接続軸90とブーストピストン91とを連結するようにした。また、主ピストン81とブーストピストン91との間には、位置拘束バネ60を設けた。
In the first embodiment, the connecting
電動モータ接続軸90とブーストピストン91との間に、連結機構16を設けた。この連結機構16は、第1ピストン8と第2ピストン9とを相対移動可能にする解放状態と、一体移動可能にする連結状態とを切り替えることができる。
The
また、主ピストン81の大径部81bのマスタシリンダ2側の端面81cと、ブーストピストン91のブレーキペダル7側の端面91aとは軸方向に離間して配置し、この間に位置拘束バネ60を設けた。この位置拘束バネ60により、位置拘束バネ60に作用する力に応じて、主ピストン81とブーストピストン91との相対位置は変化するものの、その変化量は位置拘束バネ60の付勢力によって一定の範囲内となるようにしている。
Also, the
[電動ブレーキ倍力制御作用]
図14は、実施例3の電動ブレーキ倍力装置1の動作を示す図である。図14は、第1ピストン8、第2ピストン9および電動モータ40の部分の拡大図であって、軸線に対して上方のみを記載している。図14(a)はブレーキペダル7がストロークする前の状態を示し、図14(b)はブレーキペダル7がストロークした状態を示す。
[Electric brake boost control]
FIG. 14 is a diagram illustrating the operation of the electric brake booster 1 according to the third embodiment. FIG. 14 is an enlarged view of portions of the
ブレーキストロークセンサ10に異常が発生したと判断すると、図14(a)に示すように連結機構16を締結する。この状態でブレーキペダル7がストロークすると、図14(b)に示すように推力は、プッシュロッド80→主ピストン81→位置拘束バネ60→ブーストピストン91→連結機構16→電動モータ接続軸90の順で伝達し、第1ピストン8と第2ピストン9とは一体に移動する。
If it is determined that an abnormality has occurred in the
[実施例2の効果]
次に実施例2の効果について、以下に列記する。
[Effect of Example 2]
Next, effects of Example 2 are listed below.
(8)第1ピストン8は、ブレーキペダル7からの操作力を入力するプッシュロッド80と、プッシュロッド80に連結する主ピストン81とを有し、第2ピストン9は、電動モータ40と接続する電動モータ接続軸90と、電動モータ接続軸90から推力を伝達されるブーストピストン91とを有し、主ピストン81に対するブーストピストン91の位置を拘束する位置拘束バネを設け、連結機構16は、電動モータ接続軸90とブーストピストン91とを連結可能とした。
(8) The
よって、位置拘束バネ60を介して主ピストン81からブーストピストン91に推力を伝達することが可能となる。そのため、主ピストン81とブーストピストン91によって、ホイールシリンダ15側にブレーキ液を供給することが可能となり、ブレーキ液圧の立ち上がりを電動モータ40が駆動するときと同程度に早くすることができる。
Therefore, it is possible to transmit thrust from the
また、連結機構16を介してブーストピストン91から電動モータ接続軸90に推力を伝達することが可能となる。そのため、電動モータ接続軸90の直線運動が電動モータ40へ回転運動として伝達し、実施例1と同様にレゾルバ41からの電動モータ40の回転位置情報に基づいてVDCポンプ17によりブレーキ液圧を発生させることができる。
Further, it becomes possible to transmit the thrust from the
(他の実施例)
以上、本発明を実施するための最良の形態を、実施例1ないし実施例3に基づいて説明したが、本発明の具体的な構成は、実施例1ないし実施例3に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
(Other examples)
The best mode for carrying out the present invention has been described based on the first to third embodiments. However, the specific configuration of the present invention is not limited to the first to third embodiments. The present invention includes any design changes that do not depart from the spirit of the invention.
例えば、実施例1ないし実施例3では、ブレーキストロークセンサ10に異常が発生したときに連結機構16を連結するようにしているが、イグニッションがオフのときに、連結機構16を連結するようにしても良い。これにより、主ピストン81のみによるブレーキ液の供給に比べて、主ピストン81とブーストピストン91によるブレーキ液圧の供給は多くなり、ブレーキ液圧の立ち上がりを、主ピストン81のみが移動する場合に比べて早くすることができる。
For example, in the first to third embodiments, the
また実施例1では、連結機構を主ピストン81と電動モータ接続軸90との間に設けたが、これをプッシュロッド80と電動モータ接続軸90との間に設けても良い。また、実施例2では連結機構を主ピストン81とブーストピストン91との間に設けたが、プッシュロッド80とブーストピストン91との間に設けても良い。
In the first embodiment, the coupling mechanism is provided between the
また実施例1では、主ピストン81側にラッチ16aを設け、電動モータ接続軸90側にラッチ溝90aを設けたが、ラッチ16aを電動モータ接続軸90側に設け、主ピストン81側にラッチ溝を設けるようにしても良い。
In the first embodiment, the
また実施例1では、ラッチ溝90aを1つしか設けていないが、軸方向に複数設けても良い。ラッチ溝90aを軸方向に複数設けることによって、第2ピストン9に対して任意の第1ピストン8の位置において、連結することができる。
In the first embodiment, only one
また請求項3では、主ピストン81に対するブーストピストン91の位置を拘束する拘束部材をとして位置拘束バネ60を用いているが、主ピストン81とブーストピストン91との相対位置は変化するものの、その変化量が一定の範囲内となるようにできる部材であれば他の部材であって良く、特に限定しない。
Further, in
また実施例1ないし実施例3では、マスタシリンダ2とは別にブレーキ液圧を発生させる手段として、通常はVDCに用いるVDCポンプ17を用いているが、ブレーキ液圧を発生させるポンプであれば良く、特に限定しない。
In the first to third embodiments, the
また実施例3ではマスタシリンダ圧を検出するマスタシリンダ圧センサ22を用いているが、直接マスタシリンダ圧を検出するものではなく、他のセンサ情報からマスタシリンダ圧を演算により求めるものであっても良く、特に限定しない。
In the third embodiment, the master
なお実施例1ないし実施例3において、電動モータ制御部50aは電動モータ制御手段に相当し、ブレーキストロークセンサ異常検出部50bは異常検出手段に相当し、連結機構制御部50cは連結機構制御手段に相当し、位置拘束バネ60は拘束部材に相当し、ボールねじ機構3は可逆伝達部材に相当し、VDCポンプ17はポンプに相当し、マスタシリンダ圧センサ22はマスタシリンダ圧検出手段に相当する。
In the first to third embodiments, the electric
2 マスタシリンダ
3 ボールねじ機構(可逆伝達部材)
7 ブレーキペダル
8 第1ピストン
9 第2ピストン
10 ブレーキストロークセンサ
22 マスタシリンダ圧センサ(マスタシリンダ圧検出手段)
40 電動モータ
41 レゾルバ
50a 電動モータ制御部(電動モータ制御手段)
50b ブレーキストロークセンサ異常検出部(異常検出手段)
50c 連結機構制御部(連結機構制御手段)
60 位置拘束バネ(位置拘束部材)
80 プッシュロッド
81 主ピストン
90 モータ接続軸
91 ブーストピストン
2
7
40
50b Brake stroke sensor abnormality detection unit (abnormality detection means)
50c Connection mechanism control unit (connection mechanism control means)
60 Position restraint spring (position restraint member)
80
Claims (7)
電動モータにより推力を発生する第2ピストンと、
前記第1ピストンおよび/または前記第2ピストンの作動により液圧を発生させるマスタシリンダと、
前記ブレーキペダルのストローク量を検出するストロークセンサと、
前記ストローク量に応じて、前記電動モータを制御する電動モータ制御手段と、
前記ストロークセンサの異常状態を検出する異常検出手段と、
を備えた、電動ブレーキ倍力装置において、
前記第1ピストンと前記第2ピストンとを一体移動可能に連結可能な連結機構をさらに備え、前記異常状態を検出したときに前記連結機構は連結することを特徴とする電動ブレーキ倍力装置。 A first piston actuated by input from a brake pedal;
A second piston that generates thrust by an electric motor;
A master cylinder that generates hydraulic pressure by actuation of the first piston and / or the second piston;
A stroke sensor for detecting a stroke amount of the brake pedal;
Electric motor control means for controlling the electric motor according to the stroke amount;
An abnormality detecting means for detecting an abnormal state of the stroke sensor;
In an electric brake booster equipped with
The electric brake booster further comprising a connection mechanism that can connect the first piston and the second piston so as to be integrally movable, and the connection mechanism is connected when the abnormal state is detected.
前記第1ピストンは、前記ブレーキペダルからの操作力を入力するプッシュロッドと、前記プッシュロッドに連結する主ピストンと、を有し、
前記第2ピストンは、前記電動モータと接続する電動モータ接続軸と、前記電動モータ接続軸から推力を伝達されるブーストピストンと、を有し、
前記連結機構は、前記主ピストンと前記電動モータ接続軸との間を連結可能とすることを特徴とする電動ブレーキ倍力装置。 In the electric brake booster according to claim 1,
The first piston has a push rod for inputting an operation force from the brake pedal, and a main piston connected to the push rod,
The second piston has an electric motor connection shaft connected to the electric motor, and a boost piston to which thrust is transmitted from the electric motor connection shaft,
The electric brake booster according to claim 1, wherein the connecting mechanism enables connection between the main piston and the electric motor connecting shaft.
前記第1ピストンは、前記ブレーキペダルからの操作力を入力するプッシュロッドと、前記プッシュロッドに連結する主ピストンと、を有し、
前記第2ピストンは、前記電動モータと接続する電動モータ接続軸と、前記電動モータ接続軸から推力を伝達されるブーストピストンと、を有し、
前記連結機構は、前記主ピストンと前記ブーストピストンとを連結可能とすることを特徴とする電動ブレーキ倍力装置。 In the electric brake booster according to claim 2,
The first piston has a push rod for inputting an operation force from the brake pedal, and a main piston connected to the push rod,
The second piston has an electric motor connection shaft connected to the electric motor, and a boost piston to which thrust is transmitted from the electric motor connection shaft,
The electric brake booster is characterized in that the connecting mechanism is capable of connecting the main piston and the boost piston.
前記第1ピストンは、前記ブレーキペダルからの操作力を入力するプッシュロッドと、前記プッシュロッドに連結する主ピストンと、を有し、
前記第2ピストンは、前記電動モータと接続する電動モータ接続軸と、前記電動モータ接続軸から推力を伝達されるブーストピストンと、を有し、
前記主ピストンに対する前記ブーストピストンの位置を拘束する拘束部材を設け、
前記連結機構は、前記電動モータ接続軸と前記ブーストピストンとを連結可能とすることを特徴とする電動ブレーキ倍力装置。 In the electric brake booster according to claim 2,
The first piston has a push rod for inputting an operation force from the brake pedal, and a main piston connected to the push rod,
The second piston has an electric motor connection shaft connected to the electric motor, and a boost piston to which thrust is transmitted from the electric motor connection shaft,
Providing a restraining member for restraining the position of the boost piston with respect to the main piston;
The electric brake booster characterized in that the connecting mechanism is capable of connecting the electric motor connecting shaft and the boost piston.
前記電動モータと前記電動モータ接続軸との間に、前記電動モータ接続軸に作用する力を前記電動モータへ伝達可能な可逆伝達部材と、
前記電動モータの回転位置を検出する回転位置検出手段と、
ブレーキ液圧を発生するポンプと、
前記異常状態を検出したときは、前記電動モータの回転位置に応じて前記ポンプを駆動するポンプ制御手段と、
を設けたことを特徴とする電動ブレーキ倍力装置。 The electric brake booster according to any one of claims 1 to 3,
A reversible transmission member capable of transmitting a force acting on the electric motor connection shaft to the electric motor between the electric motor and the electric motor connection shaft;
Rotational position detecting means for detecting the rotational position of the electric motor;
A pump that generates brake fluid pressure;
When detecting the abnormal state, pump control means for driving the pump according to the rotational position of the electric motor;
An electric brake booster characterized by comprising:
前記マスタシリンダの液圧を検出するマスタシリンダ圧検出手段と、
ブレーキ液圧を発生するポンプと、
前記異常状態を検出したときは、前記マスタシリンダの液圧に応じて前記ポンプを駆動するポンプ制御手段と、
を設けたことを特徴とする電動ブレーキ倍力装置。 The electric brake booster according to any one of claims 1 to 3,
Master cylinder pressure detecting means for detecting the hydraulic pressure of the master cylinder;
A pump that generates brake fluid pressure;
When detecting the abnormal state, pump control means for driving the pump according to the hydraulic pressure of the master cylinder;
An electric brake booster characterized by comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008051443A JP2009208523A (en) | 2008-03-01 | 2008-03-01 | Electric brake booster |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008051443A JP2009208523A (en) | 2008-03-01 | 2008-03-01 | Electric brake booster |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009208523A true JP2009208523A (en) | 2009-09-17 |
Family
ID=41182108
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008051443A Pending JP2009208523A (en) | 2008-03-01 | 2008-03-01 | Electric brake booster |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009208523A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012011814A (en) * | 2010-06-29 | 2012-01-19 | Nissan Motor Co Ltd | Electric booster |
| KR20120045599A (en) * | 2010-10-29 | 2012-05-09 | 현대모비스 주식회사 | Multi function breaking pressure generating device |
| CN103129546A (en) * | 2011-12-05 | 2013-06-05 | 博世汽车部件(苏州)有限公司 | Electronic control brake booster |
| WO2013179746A1 (en) * | 2012-06-01 | 2013-12-05 | 日立オートモティブシステムズ株式会社 | Hydraulic pressure generation device |
| KR101478070B1 (en) * | 2013-03-07 | 2015-01-02 | 주식회사 만도 | Electrical brake booster |
-
2008
- 2008-03-01 JP JP2008051443A patent/JP2009208523A/en active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012011814A (en) * | 2010-06-29 | 2012-01-19 | Nissan Motor Co Ltd | Electric booster |
| KR20120045599A (en) * | 2010-10-29 | 2012-05-09 | 현대모비스 주식회사 | Multi function breaking pressure generating device |
| KR101660047B1 (en) * | 2010-10-29 | 2016-09-30 | 현대모비스 주식회사 | Multi Function Breaking Pressure Generating Device |
| CN103129546A (en) * | 2011-12-05 | 2013-06-05 | 博世汽车部件(苏州)有限公司 | Electronic control brake booster |
| WO2013083039A1 (en) * | 2011-12-05 | 2013-06-13 | Bosch Automotive Products (Suzhou) Co., Ltd. | Electric Brake Booster |
| US9428169B2 (en) | 2011-12-05 | 2016-08-30 | Bosch Automotive Products (Suzhou) Co., Ltd. | Electric brake booster |
| WO2013179746A1 (en) * | 2012-06-01 | 2013-12-05 | 日立オートモティブシステムズ株式会社 | Hydraulic pressure generation device |
| KR101478070B1 (en) * | 2013-03-07 | 2015-01-02 | 주식회사 만도 | Electrical brake booster |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5273098B2 (en) | Brake control device for vehicle | |
| JP5110286B2 (en) | Brake device | |
| CN111094089B (en) | Electric booster | |
| US8833869B2 (en) | Vehicle brake system | |
| KR101880760B1 (en) | Electric booster | |
| JP2010260396A5 (en) | ||
| JP2011068344A (en) | Brake device | |
| JP2007296963A (en) | Brake device | |
| CN105774786B (en) | Method for controlling a hydraulic brake system of a motor vehicle and hydraulic brake system | |
| JP2009208523A (en) | Electric brake booster | |
| JPWO2019059201A1 (en) | Electric booster | |
| JP2012071737A5 (en) | ||
| US11440524B2 (en) | Brake control device | |
| JP4822003B2 (en) | Electric booster | |
| CN110325414B (en) | Vehicle brake control device | |
| JP5716525B2 (en) | Brake control device | |
| JP5640498B2 (en) | Electric booster | |
| JP6327975B2 (en) | Brake device | |
| JP5092798B2 (en) | Electric brake booster | |
| JP5875310B2 (en) | Electric booster | |
| US11858490B2 (en) | Brake control device | |
| JP2012111373A (en) | Braking system | |
| JP2014046747A (en) | Brake system | |
| JP2020116967A (en) | Brake control device | |
| JP6373091B2 (en) | Brake device |