JP2009120318A - Carrying device for work - Google Patents
Carrying device for work Download PDFInfo
- Publication number
- JP2009120318A JP2009120318A JP2007295822A JP2007295822A JP2009120318A JP 2009120318 A JP2009120318 A JP 2009120318A JP 2007295822 A JP2007295822 A JP 2007295822A JP 2007295822 A JP2007295822 A JP 2007295822A JP 2009120318 A JP2009120318 A JP 2009120318A
- Authority
- JP
- Japan
- Prior art keywords
- linear
- traveling
- work
- traveling body
- block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Control Of Linear Motors (AREA)
- Non-Mechanical Conveyors (AREA)
Abstract
Description
この発明は、作業用搬送装置に関する。 The present invention relates to a work transfer device.
ガイドレール上を摺動案内される走行体をリニアモータによって走行駆動させることにより、走行体上に載置された被処理物の流れ作業を行うことが可能な作業用搬送装置が従来公知である。このような作業用搬送装置は、ガイドレールによって形成される走行路が画一的に定まっており、作業機等の配置が変更された際に、これに合せて走行路を変更することが困難であり、汎用性が低いという欠点を有していた。 2. Description of the Related Art Conventionally known is a work transfer device capable of performing a flow operation of an object to be processed placed on a traveling body by driving the traveling body slidingly guided on a guide rail by a linear motor. . In such a work transfer device, the travel path formed by the guide rail is uniformly defined, and when the arrangement of the work implements or the like is changed, it is difficult to change the travel path according to the change. And has the disadvantage of low versatility.
上記欠点を改善するものとして、ベース部に直線状のガイドレールが延設される複数のリニアブロックと、前記ガイドレール上を摺動案内される走行体と、リニアブロック側のガイドレール延設方向に並列配置された複数の固定磁石及び走行体側に設けられた可動磁石等により構成されるリニアモータと、該リニアモータの出力を制御して走行体をガイドレールに沿って走行駆動させる制御部とを備え、前記複数のリニアブロックを連結することにより形成される単一の走行路に沿って走行体上に載置された被処理物の流れ作業を行うことが可能な特許文献1に示す作業用搬送装置が公知となっている。
上記文献の作業用搬送装置は、連結させるリニアブロックの数を増減させることにより、容易に走行路の変更ができるというメリットがある一方で、連結したリニアブロック間を走行する複数の走行体の走行駆動制御をどのように行うのかが課題となる。例えば、走行路を走行する複数の走行体を、互いに衝突することなく効率良く流れ作業が行えるように制御することが好ましいが、走行路を変更する度に走行体の走行駆動制御手段を変更する必要があると、利便性が低下する。
本発明は、上記課題を解決し、リニアブロックの数を増減させることにより走行路を容易に変更可能で且つ走行路を変更することによる走行体の走行駆動制御手段の変更を最小限に抑制できる作業用搬送装置を提供することを目的とする。
The working transport device of the above document has an advantage that the traveling path can be easily changed by increasing or decreasing the number of linear blocks to be connected, while traveling of a plurality of traveling bodies that travel between the connected linear blocks. The issue is how to perform drive control. For example, it is preferable to control a plurality of traveling bodies traveling on a traveling path so that the flow work can be performed efficiently without colliding with each other, but the traveling drive control means of the traveling body is changed every time the traveling path is changed. If necessary, convenience is reduced.
The present invention solves the above-described problems, and can easily change the traveling path by increasing or decreasing the number of linear blocks, and can suppress a change in traveling drive control means of the traveling body by changing the traveling path to a minimum. It is an object of the present invention to provide a work transfer device.
上記課題を解決するため本発明の作業用搬送装置は、第1に、ベース部7に直線状のガイドレール8が延設される複数のリニアブロック1と、前記ガイドレール8上を摺動案内される複数の走行体4と、リニアブロック1側のガイドレール8延設方向に並列配置された複数の固定電磁石9及び走行体4側に設けられた可動永久磁石14等により構成されるリニアモータ18と、該リニアモータ18の出力を制御して走行体4をガイドレール8に沿って走行駆動させる制御部28とを備え、前記複数のリニアブロック1を連結することにより形成される単一の走行路3に沿って走行体4により搬送される被処理物6の流れ作業を行うことが可能な作業用搬送装置において、リニアブロック1により形成される走行路3を複数のポイントPに区画し、走行体4がどのポイントPにいるかを検出する位置検出手段19を設け、制御部28が走行体4の現ポイントPでの作業が完了したこと又は作業が不必要であることを判断するとともに次ポイントPに他の走行体4がいないことを検出することにより該走行体4を次ポイントPに変位させることを特徴としている。
In order to solve the above-described problems, the working transport device according to the present invention firstly includes a plurality of linear blocks 1 in which linear guide rails 8 extend from the base portion 7 and sliding guides on the guide rails 8. Linear motor composed of a plurality of
第2に、ベース部24にガイドレール23が延設されるとともに走行体4を移送する移送機構26が設けられた移送ブロック2を前記リニアブロック1に連結して単一の走行路3を形成すること特徴としている。
Second, the
第3に、ガイドレール23をカーブ状に形成した複数の移送ブロック2をリニアブロック1に連結することにより環状の走行路3を形成したことを特徴としている。
Thirdly, an
第4に、ガイドレール23を直線状に形成した移送ブロック2を介して2つのリニアブロック1を連結したことを特徴としている。
Fourthly, the two linear blocks 1 are connected through a
第5に、移送ブロック2上を搬送されている被処理物6に対して作業を行わないことを特徴としている。
Fifth, the present invention is characterized in that no work is performed on the workpiece 6 being transported on the
第6に、ブロック1,2毎に制御部28,29を設けたことを特徴としている。
Sixth, the
以上のように構成される本発明の作業用搬送装置によれば、走行体の現ポイントと次ポイントとの間の走行駆動制御をリニアブロックにより形成される走行路の全領域で同様に行うことができるため、リニアブロックの数を増減させることにより走行路を容易に変更可能で且つ走行路を変更することによる走行体の走行駆動制御手段の変更を最小限に抑制できるという効果がある。 According to the work transport device of the present invention configured as described above, the driving control between the current point and the next point of the traveling body is similarly performed in the entire region of the traveling path formed by the linear block. Therefore, it is possible to easily change the traveling path by increasing / decreasing the number of linear blocks, and it is possible to minimize the change of the traveling drive control means of the traveling body by changing the traveling path.
また、リニアブロックと移送ブロックとにより環状の走行路を形成することにより、走行体が一方向に走行し続けることが可能になり、走行体を往復走行させる必要がなくなるため、制御構造をよりシンプルにすることが可能になるという効果がある。 In addition, by forming an annular traveling path with the linear block and the transfer block, the traveling body can continue to travel in one direction, eliminating the need to reciprocate the traveling body, thus simplifying the control structure. It is possible to make it possible.
また、移送ブロック上を搬送されている被処理物に対して作業を行わないことにより、移送ブロックの搬送下流側で作業遅れが生じていたとしても、移送ブロックで走行体を待機させることが可能であるため、上記作業遅れを是正できるという効果がある。 In addition, by not performing work on the workpiece being transported on the transfer block, it is possible to make the traveling body stand by at the transfer block even if there is a work delay downstream of the transfer block. Therefore, there is an effect that the work delay can be corrected.
さらに、ブロック毎に制御部を設けることにより、リニアブロック又は移送ブロックを増減させることがさらに容易になり、汎用性が一層向上するという効果がある。 Furthermore, by providing a control unit for each block, it is easier to increase or decrease the linear block or the transfer block, and there is an effect that versatility is further improved.
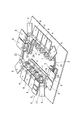
図1は本発明を適用した搬送装置の斜視図であり、図2はリニアブロック、走行体及びリニアモータの部分断面斜視図である。搬送装置は、複数のリニアブロック1と、複数の移送ブロック2と、複数のリニアブロック1及び移送ブロック2により形成される単一且つ環状の走行路3上を走行する複数の走行体4とを備え、走行路3の周辺に設置された作業機27(図3参照)により、走行体4によって走行路上3を搬送されていくワーク6(被処理物)の流れ作業を行うことが可能なように構成されている。
FIG. 1 is a perspective view of a conveying apparatus to which the present invention is applied, and FIG. 2 is a partial sectional perspective view of a linear block, a traveling body, and a linear motor. The transport device includes a plurality of linear blocks 1, a plurality of
上記リニアブロック1は、平面視長方形状に形成された板状のベース部7と、ベース部7の2つの長辺に沿ってそれぞれ延設された直線状のガイドレール8(リニアブロック側ガイドレール)と、ベース部7上の上記2つのガイドレール8,8に挟まれた位置に配置固定された複数のコイル体9(固定電磁石,固定磁石,固定子)と、コイル体9の上方をカバーするカバー体11とを備えている。複数のコイル体9は、ガイドレール8の延設方向に向かって並列配置されており、コイル体9に電流を流すことによりコイル体9上方(カバー体11上方)の磁場を変化させる。
The linear block 1 includes a plate-like base portion 7 formed in a rectangular shape in plan view, and linear guide rails 8 (linear block side guide rails) extending along two long sides of the base portion 7. ), A plurality of coil bodies 9 (fixed electromagnets, fixed magnets, and stators) arranged and fixed at positions sandwiched between the two guide rails 8 and 8 on the base portion 7, and an upper portion of the
上記走行体4は、上記ガイドレール8上に摺動自在に係合されるスライダー12をガイドレール8毎に2つで計4つ備え、この4つのスライダー12上に可動テーブル13が載置固定されている。この可動テーブル13の下面(リニアブロック1との対向面)にはプレート状のマグネット14(可動永久磁石,可動磁石,可動子)が複数固設され、上面には支持体16を介して載置テーブル17が支持されており、この載置テーブル17にワーク6を載置する。
The
上記複数のマグネット14は、表裏にN極とS極が形成され、隣接するマグネット14の表裏が逆になるように上記コイル体9の並列方向と同一の方向に並列配置されている。そして、可動テーブル13をコイル体9の上方に位置させた状態では、マグネット14がコイル体9と近接状態で対向するように構成されている。
The plurality of
上記複数のコイル体9、複数のマグネット14等によりリニアモータ18を構成している。具体的にはコイル体9に流す電流を制御することにより、磁場を変化させ、この磁場によってマグネット14及びマグネット14が固定された走行体4をガイドレール8に沿って所定の方向に走行駆動させる。
The plurality of
また、リニアブロック1のガイドレール8上における走行体4の位置検出は位置検出手段であるリニアエンコーダ19(光学式リニアエンコーダ,エンコーダ)によって行う。リニアエンコーダ19は、ガイドレール8に隣接した状態でベース部7に取付固定されたエンコーダヘッド21(光学式センサ,センサ)と、走行体4の可動テーブル13下面に取付固定されてガイドレール延設方向に延びるエンコーダ用スケール22(スケール)とを備え、エンコーダ用スケール22の移動をエンコーダヘッド21で検出することにより、走行体4の位置検出を行う。ちなみに、エンコーダ用スケール22には所定間隔毎に目盛(図示しない)が設けられ、この目盛をエンコーダヘッド21で読取ることにより、エンコーダヘッド21が走行体4の位置検出を行うように構成されている。
Further, the position of the
なお、リニアモータ18のコイル体9及びリニアエンコーダ19のエンコーダヘッド21は、電気配線が必要であるが、これらをリニアブロック1側に集中配置するとともに電気配線が不要なマグネット14及びエンコーダ用スケール22を走行体4側に配置することにより、走行体4側の電気配線を不要し、走行体4の移動に起因した電気配線の故障を防止している。
The
上記移送ブロック2は、スライダー12を介して前述した走行体4を摺動自在に支持する一対のガイドレール23,23(移送ブロック側ガイドレール)と、ガイドレール23を支持するベース体24(ベース部)と、ベース体24に設置された移送機構26とを備えている。移送機構26は後述する移送モータ37(図4参照)によって回転駆動され、ガイドレール23上の走行体4を順次所定方向移送していく。
The
本搬送装置は、2つのリニアブロック1をガイドレール8の延設方向に直列的に連結したものを2つ用意し、これらを同一の水平面上に平行に並べて、互いの始端と終端を半円形状にカーブしたガイドレールを有する2つの移送ブロック3,3でそれぞれ連結することにより、各ブロック1,2のガイドレール8,23が接続され、単一且つ環状の走行路3を形成している。そして、図2における時計回り(図3の矢印方向)に走行体4を順次変位させていく。
This transport device prepares two linear blocks 1 connected in series in the extending direction of the guide rail 8 and arranges them in parallel on the same horizontal plane so that the start and end of each other are semicircular. The
図3は、本搬送装置の概略図である。本搬送装置は、走行路をブロック1,2毎に複数の走行ポイントP(ポイント)に区画している。図示する例では、各リニアブロック1が2つの走行ポイントPに区画される一方で、各移送ブロック2が5つの走行ポイントPに区画されており、全走行路3で18の走行ポイントPに区画されている。この各走行ポイントPに走行路3上の複数の走行体4が順次位置決めされていく。
FIG. 3 is a schematic view of the present conveying apparatus. This transport device divides the travel path into a plurality of travel points P (points) for each of the
各リニアブロック1の走行ポイントPには、必要に応じて作業機27が設置され、対応する走行ポイントPで、ワーク6の処理作業を行う。一方、各移送ブロック2の走行ポイントPには作業機27を配置せず、この走行ポイントPでの作業も行われない。なお、リニアブロック1の走行ポイントPであっても、作業機27を設置していない走行ポイントPがある。
A
また、各走行ポイントPにおいて作業機27による作業を行う際、リニアモータ18を介してその走行ポイントP内における走行体4の位置を適宜調整し、効率の良い作業を行わせることが可能である。その際、ガイドレール8上を摺動案内される走行体4の位置検出には前述したリニアエンコーダ19を用いる。
Further, when the work implement 27 is operated at each travel point P, the position of the
各ブロック1,2及び各作業機27は、各別の制御部28,29,31によって、制御される。
The
図4(A)はリニアブロックの制御ブロック図であり、(B)は移送ブロックの制御ブロック図であり、(C)は作業機の制御ブロック図である。リニアブロック1の制御部であるリニアブロック用制御部28は、他のブロック1,2及び対応する作業機31との情報のやり取りを行うための通信手段32を有し、入力側に前述したリニアエンコータ19が接続され、出力側にリニアモータ18を作動させるモータドライバ33が接続されている。リニアブロック用制御部28は、上記リニアエンコーダ18を介して、リニアブロック1のどの走行ポイントPに走行体4がいるかを識別するように構成されている。
4A is a control block diagram of the linear block, FIG. 4B is a control block diagram of the transfer block, and FIG. 4C is a control block diagram of the work machine. The linear
移送ブロック2の制御部である移送ブロック用制御部29は、他のブロック1,2との情報のやり取りを行うための通信手段34を有し、入力側に移送ブロック2のどの走行ポイントPに走行体4がいるのかを検出する位置検出手段36(位置検出センサ)が接続され、出力側に移送モータ37(移送機構駆動手段)が接続されている。
The
作業機27の制御部である作業機用制御部31は、リニアブロック1との情報のやり取りを行うための通信手段38を有し、出力側に作業機アクチュエータ39が接続されている。そして、要求に応じて、対応する走行ポイントPにおける作業情報(例えば、作業開始前、作業中、作業完了等)等をリニアブロック1側に送信する。
The work
図5は、リニアブロック用制御部の処理フロー図である。各リニアブロック用制御部28は、対応するリニアブロック1(リニアブロック用制御部28が制御を担当するリニアブロック1)内の走行ポイントPに走行体4がいることを検出する度に処理を開始し、ステップS1に進む。ステップS1では、走行体4がいる走行ポイントPが対応するリニアブロック1の終端の走行ポイントPであるか否かを識別し、終端の走行ポイントでなければ、ステップS2に進む。
FIG. 5 is a processing flowchart of the linear block control unit. Each linear
ステップS2では、リニアエンコーダ19を介して、次走行ポイントP情報の読込処理を行いステップS3に進む。ステップS3では、ステップS3で読込んだ情報に基づいて、次走行ポイントPに別の走行体4があるか否かを識別(検出)し、次走行ポイントPに別の走行体4がある場合には処理を終了し、別の走行体4がない場合にはステップS4に処理を進める。
In step S2, the next traveling point P information is read through the
ステップS4では、通信手段32を介して、対応する作業機27(現走行ポイントPで作業を行う作業機27)の情報を取得し、ステップS5に進む。なお、対応する作業機27が無い場合には、作業が不必要である旨の情報を取得して、ステップS5に進む。ステプS5では、ステップS5で取得した情報に基づいて、現走行ポイントPでの作業が完了したこと又は現走行ポイントPでの作業が不必要であることが識別(判断)されると、ステップS6に進み、それ以外の場合には処理を終了させる。
In step S4, information on the corresponding work machine 27 (
ステップS6では、リニアモータ18を制御して、走行体4を次走行ポイントPに変位させて処理を終了させる。
In step S6, the
ステップS1において、走行体4がいる走行ポイントPが対応するリニアブロック1の終端の走行ポイントPであることが識別されると、ステップS7に進む。ステップS7では、通信手段32を介して次ブロック1,2(搬送方向下流側に直に連結されたブロック1,2)の情報を取得し、ステップS8に進む。ステップS8では、ステップS7で取得した情報に基づいて、次ブロック1,2がリニアブロック1であるか移送ブロック2であるかの識別を行い、リニアブロック1であればステップS9に進み、移送ブロック2であればステップS10に進む。
If it is identified in step S1 that the traveling point P where the traveling
ステップS9では、ステップS7で取得した情報に基づいて、次走行ポイントP(次リニアブロック1の始端の走行ポイントP)に別の走行体4があるか否かの識別(検出)を行い、次走行ポイントPに別の走行体4が無い場合はステップS4に進み、状況に応じてステップS5→ステップS6と処理が進行し、次走行ポイントPに走行体4を変位させる。一方、ステップS9において、次走行ポイントPに走行体4があることが識別された場合には、処理を終了させる。
In step S9, based on the information acquired in step S7, it is identified (detected) whether there is another traveling
ステップS10では、ステップS7で取得した情報に基づいて、次移送ブロック2の走行ポイントPに空きスペースがあるか否か(次移送ブロック2の走行ポイントPの何れかに走行体4が無い状態であるか否か)の識別(検出)を行い、空きスペースがある場合には次移送ブロック2に走行体4を収容するスペースが残されているため、ステップS4に進み、状況に応じてステップS5→ステップS6と処理が進行し、次走行ポイントP(次移送ブロック2の始端の走行ポイントP)に走行体4を変位させる。一方、ステップS10において、空きスペースが無いことが識別された場合には、処理を終了させる。
In step S10, based on the information acquired in step S7, whether or not there is an empty space at the travel point P of the next transfer block 2 (in the state where there is no
図6は、移送ブロック用制御部の処理フロー図である。移送ブロック用制御部29の処理が開始されると、ステップS21に進む。ステップS21では、通信手段34を介して次ブロック1,2(搬送方向下流側に直に連結されたブロック1,2)の情報を取得し、ステップS22に進む。
FIG. 6 is a process flow diagram of the transfer block control unit. When the process of the transfer
ステップS22では、ステップS21で取得した情報に基づいて、次ブロック1,2の始端ポイントに別の走行体4があるか否かの識別(検出)を行い、走行体4が無い場合はステップS23に進み、ある場合はステップS24に進む。ステップS23では、次ブロック1,2に走行体4を移送できる状態であるため、移送モータ37を介して移送機構26を駆動させ、移送モータ37下流側に順次、走行体4を送り出す(押し出す)状態にして、ステップS21に処理を戻す。一方、ステップS24では、次ブロック1,2に走行体4を移送できない状態であるため、移送機構26の駆動を停止させ、ステップS21に処理を戻す。
In step S22, based on the information acquired in step S21, it is identified (detected) whether there is another traveling
以上、図4、5及び6に示すアルゴリズムによって、走行路3を変更した場合でも、所定条件を満たすことにより、走行体4の走行駆動制御手段を変更することなく対応することが可能になる。具体的には、走行路3を変更した場合、各制御部28,29,31間の通信が必要最小限で確保できれば、走行体4の走行駆動制御手段を変更する必要が無い。
As described above, even when the
図7は、本発明の他の実施例を示す搬送装置の概略図である。以下、図1乃至6に示す実施形態と異なる部分について説明する。図7に示す例では、2つのリニアブロック1,1をガイドレール8延設方向に直列的且つ直線状に連結する際、直線状のガイドレール23を有する移送ブロック26を介して上記2つのリニアブロック1,1を連結している。
FIG. 7 is a schematic view of a conveying apparatus showing another embodiment of the present invention. Hereinafter, a different part from embodiment shown in FIG. 1 thru | or 6 is demonstrated. In the example shown in FIG. 7, when the two linear blocks 1 and 1 are connected in series and linearly in the extending direction of the guide rail 8, the two linear blocks 1 and 1 are connected via the
また、同図の例では、4つのリニアブロック1と、直線状のガイドレール23を有する2つの移送ブロック2と、半円形状にカーブしたガイドレール23を有する2つの移送ブロック2とにより単一且つ環状の走行路3を形成しており、上記4つの移送ブロック2の走行ポイントP毎に移送機構26が設けられている。
Moreover, in the example of the figure, the four linear blocks 1, the two
以上のように構成することにより、リニアブロック用制御部28及び移送ブロック用制御部29の処理フローを図5に示す処理フローからステップS1,S7〜S10を省いた処理フローで共通化できる。このため、アルゴリズムがより単純化される。ちなみに、図5及び6の処理フローをそのまま適用することも可能である。
By configuring as described above, the processing flow of the linear
なお、上記した例では、平面視環状の走行路を形成したが、移動機構26をエレベータにより構成して走行体4を上下方向に移送できるようにし、走行路3を側面視で環状に形成することも可能である。くわえて、移送機構26として搬送ベルト等を用いてもよい。
In the above example, the annular traveling path is formed in a plan view. However, the moving
また、上記した例では、リニアブロック1のガイドレール8,8及び移送ブロック2のガイドレール23,23として一対になっているものを用いたが、1本のものを用いてもよい。
In the above example, a pair of guide rails 8 and 8 of the linear block 1 and a pair of
また、上記した例では、リニアエンコーダ19として光学式のものを用いたが、磁気式のものを用いてもよい。
In the above example, an optical type is used as the
さらに、上記した例では、2つのリニアブロック1,1を1つの移送ブロック2によって連結しているが、2つのリニアブロック1,1を複数の移送ブロック2を介して連結してもよい。その際には、ガイドレール23が直線状になっている移送ブロック2を用いてもよいし、ガイドレール23がカーブ状になっている移送ブロック2を用いてもよいし、これらを組合せてもよい。
Furthermore, in the above-described example, the two linear blocks 1 and 1 are connected by one
1 リニアブロック(ブロック)
2 移送ブロック(ブロック)
3 走行路
4 走行体
6 ワーク(被処理物)
7 ベース部
8 ガイドレール(リニアブロック側ガイドレール)
9 コイル体(固定電磁石,固定磁石,固定子)
14 マグネット(可動永久磁石,可動磁石,可動子)
18 リニアモータ
19 リニアエンコーダ(位置検出手段,光学式リニアエンコーダ,エンコーダ)
23 ガイドレール(移送ブロック側ガイドレール)
24 ベース体(ベース部)
26 移送機構
28 リニアブロック用制御部(制御部)
29 移送ブロック用制御部(制御部)
P 走行ポイント(ポイント)
1 Linear block (block)
2 Transfer block (block)
3 traveling
7 Base part 8 Guide rail (Linear block side guide rail)
9 Coil body (fixed electromagnet, fixed magnet, stator)
14 Magnet (movable permanent magnet, movable magnet, mover)
18
23 Guide rail (Transfer block side guide rail)
24 Base body (base part)
26
29 Control unit for transfer block (control unit)
P Running point (point)
Claims (6)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007295822A JP2009120318A (en) | 2007-11-14 | 2007-11-14 | Carrying device for work |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007295822A JP2009120318A (en) | 2007-11-14 | 2007-11-14 | Carrying device for work |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009120318A true JP2009120318A (en) | 2009-06-04 |
Family
ID=40812916
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007295822A Pending JP2009120318A (en) | 2007-11-14 | 2007-11-14 | Carrying device for work |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009120318A (en) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101997386A (en) * | 2009-08-18 | 2011-03-30 | 株式会社安川电机 | Linear and curvilinear motor system |
| JP2013022006A (en) * | 2011-07-26 | 2013-02-04 | Orion Machinery Co Ltd | Method for avoiding contact of milking machine |
| JP2014114033A (en) * | 2012-12-07 | 2014-06-26 | Shibuya Kogyo Co Ltd | Carton molding device |
| JP2015036318A (en) * | 2013-08-12 | 2015-02-23 | 澁谷工業株式会社 | Article delivery device |
| KR20150038454A (en) * | 2012-07-27 | 2015-04-08 | 머쉰즈 하이스트 메카트로닉 게엠베하 | Transport device for transporting objects in a circulating manner |
| JP2016527498A (en) * | 2013-07-19 | 2016-09-08 | ヴィルコ・アーゲー | Method and apparatus for in-line testing of device |
| CN106612095A (en) * | 2015-10-22 | 2017-05-03 | 佳能株式会社 | Moving-magnet type linear motor controlling system and manufacturing method of parts |
| WO2017203018A1 (en) * | 2016-05-27 | 2017-11-30 | MGI Digital Technology | Device and method for conveying substrates in a printing machine |
| CN107814013A (en) * | 2017-10-16 | 2018-03-20 | 江苏仅包装技术有限公司 | A kind of packaging facilities conveying device |
| JP2018512255A (en) * | 2015-04-09 | 2018-05-17 | ジディエンメ・エッセ・ピ・ア | Manufacturing machine for producing sanitary absorbent articles |
| CN108336885A (en) * | 2017-07-06 | 2018-07-27 | 上海果栗自动化科技有限公司 | Linear motor and its mover motion positions control device |
| CN108328249A (en) * | 2017-07-06 | 2018-07-27 | 上海果栗自动化科技有限公司 | A kind of linear transmission system |
| CN109217518A (en) * | 2017-07-06 | 2019-01-15 | 上海合栗智能科技有限公司 | Linear motor and its stator |
| CN109217614A (en) * | 2017-07-06 | 2019-01-15 | 上海合栗智能科技有限公司 | Linear motor and its mover |
| WO2020048263A1 (en) * | 2018-09-06 | 2020-03-12 | 上海果栗自动化科技有限公司 | Gas source access device for linear conveying system |
| CN112688450A (en) * | 2020-12-23 | 2021-04-20 | 阿尔伯特(苏州)科技有限责任公司 | Closed-loop linear motor rotor and linear motor |
| CN113783396A (en) * | 2021-09-13 | 2021-12-10 | 浙江大学先进电气装备创新中心 | Direct-drive type annular flexible conveying system and cooperative control method thereof |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0564311A (en) * | 1991-09-04 | 1993-03-12 | Mitsubishi Electric Corp | Linear conveyor |
| JPH0847111A (en) * | 1994-08-02 | 1996-02-16 | Toshiba Corp | Conveying system |
| JPH09208051A (en) * | 1996-02-05 | 1997-08-12 | Murata Mach Ltd | Linear transport vehicle system |
| JP2000238633A (en) * | 1999-02-23 | 2000-09-05 | Murata Mach Ltd | Linear carrier |
| JP2002104656A (en) * | 2000-09-29 | 2002-04-10 | Sumitomo Heavy Ind Ltd | Magnetic levitation moving device |
-
2007
- 2007-11-14 JP JP2007295822A patent/JP2009120318A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0564311A (en) * | 1991-09-04 | 1993-03-12 | Mitsubishi Electric Corp | Linear conveyor |
| JPH0847111A (en) * | 1994-08-02 | 1996-02-16 | Toshiba Corp | Conveying system |
| JPH09208051A (en) * | 1996-02-05 | 1997-08-12 | Murata Mach Ltd | Linear transport vehicle system |
| JP2000238633A (en) * | 1999-02-23 | 2000-09-05 | Murata Mach Ltd | Linear carrier |
| JP2002104656A (en) * | 2000-09-29 | 2002-04-10 | Sumitomo Heavy Ind Ltd | Magnetic levitation moving device |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101997386A (en) * | 2009-08-18 | 2011-03-30 | 株式会社安川电机 | Linear and curvilinear motor system |
| JP2013022006A (en) * | 2011-07-26 | 2013-02-04 | Orion Machinery Co Ltd | Method for avoiding contact of milking machine |
| KR20150038454A (en) * | 2012-07-27 | 2015-04-08 | 머쉰즈 하이스트 메카트로닉 게엠베하 | Transport device for transporting objects in a circulating manner |
| KR102138689B1 (en) * | 2012-07-27 | 2020-07-29 | 머쉰즈 하이스트 메카트로닉 게엠베하 | Transport device for transporting objects in a circulating manner |
| JP2014114033A (en) * | 2012-12-07 | 2014-06-26 | Shibuya Kogyo Co Ltd | Carton molding device |
| JP2016527498A (en) * | 2013-07-19 | 2016-09-08 | ヴィルコ・アーゲー | Method and apparatus for in-line testing of device |
| JP2015036318A (en) * | 2013-08-12 | 2015-02-23 | 澁谷工業株式会社 | Article delivery device |
| JP2018512255A (en) * | 2015-04-09 | 2018-05-17 | ジディエンメ・エッセ・ピ・ア | Manufacturing machine for producing sanitary absorbent articles |
| US10581308B2 (en) | 2015-10-22 | 2020-03-03 | Canon Kabushiki Kaisha | Moving-magnet type linear motor controlling system and manufacturing method of parts |
| CN106612095A (en) * | 2015-10-22 | 2017-05-03 | 佳能株式会社 | Moving-magnet type linear motor controlling system and manufacturing method of parts |
| CN106612095B (en) * | 2015-10-22 | 2020-10-02 | 佳能株式会社 | Moving magnet type linear motor control system and component manufacturing method |
| WO2017203018A1 (en) * | 2016-05-27 | 2017-11-30 | MGI Digital Technology | Device and method for conveying substrates in a printing machine |
| CN108336885A (en) * | 2017-07-06 | 2018-07-27 | 上海果栗自动化科技有限公司 | Linear motor and its mover motion positions control device |
| CN109217614A (en) * | 2017-07-06 | 2019-01-15 | 上海合栗智能科技有限公司 | Linear motor and its mover |
| CN109217518A (en) * | 2017-07-06 | 2019-01-15 | 上海合栗智能科技有限公司 | Linear motor and its stator |
| CN108328249A (en) * | 2017-07-06 | 2018-07-27 | 上海果栗自动化科技有限公司 | A kind of linear transmission system |
| CN107814013A (en) * | 2017-10-16 | 2018-03-20 | 江苏仅包装技术有限公司 | A kind of packaging facilities conveying device |
| WO2020048263A1 (en) * | 2018-09-06 | 2020-03-12 | 上海果栗自动化科技有限公司 | Gas source access device for linear conveying system |
| CN112688450A (en) * | 2020-12-23 | 2021-04-20 | 阿尔伯特(苏州)科技有限责任公司 | Closed-loop linear motor rotor and linear motor |
| CN113783396A (en) * | 2021-09-13 | 2021-12-10 | 浙江大学先进电气装备创新中心 | Direct-drive type annular flexible conveying system and cooperative control method thereof |
| WO2023035517A1 (en) * | 2021-09-13 | 2023-03-16 | 浙江大学 | Direct drive type annular flexible delivery system and cooperative control method therefor |
| US11881752B2 (en) | 2021-09-13 | 2024-01-23 | Zhejiang University | Direct-drive type annular flexible transportation system and collaborative control method thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009120318A (en) | Carrying device for work | |
| CN103918174B (en) | Linear conveyor | |
| US10294042B2 (en) | Transfer system | |
| JP6704705B2 (en) | Movable magnet type linear motor control system and control method thereof | |
| CN109716635B (en) | Linear transport apparatus and drive control method for the same | |
| KR101596336B1 (en) | Linear motor and linear conveyance device | |
| WO2013069201A1 (en) | Linear conveyor, conveyance carriage, and drive control method for linear conveyor | |
| JP2015208083A (en) | linear motor controller and linear motor control system | |
| TW201230661A (en) | Distributed linear motor system | |
| US10532891B2 (en) | Transport route of a long stator linear motor | |
| JP4438882B2 (en) | Mobile system | |
| CN105452146B (en) | Distributed linear motor for transportation system is adjusted | |
| JP6733170B2 (en) | Linear motor system | |
| KR20140014316A (en) | Machine tool line | |
| KR20210122115A (en) | Conveying system using linear motor and Operating method thereof | |
| JP5623039B2 (en) | Conveying device having a dynamically variable driving range | |
| JP2019103225A (en) | Transport apparatus, processing system, and manufacturing method of article | |
| TWI527660B (en) | Handling system | |
| EP3016136A1 (en) | Transport system with magnetically driven transport elements and according transportation method | |
| JP2020129854A (en) | Carrier and carrier system | |
| TW201233613A (en) | Conveyance system | |
| KR102593127B1 (en) | Linear motor and production apparatus | |
| TWI540824B (en) | Discrete configuration of linear motor movement control device | |
| JP2013255331A (en) | Linear encoder | |
| KR20220101929A (en) | Mulberry cotton manufacturing apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090803 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111027 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111108 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120306 |