JP2009027762A - 動き補償画像符号化装置及び符号化方法 - Google Patents
動き補償画像符号化装置及び符号化方法 Download PDFInfo
- Publication number
- JP2009027762A JP2009027762A JP2008286621A JP2008286621A JP2009027762A JP 2009027762 A JP2009027762 A JP 2009027762A JP 2008286621 A JP2008286621 A JP 2008286621A JP 2008286621 A JP2008286621 A JP 2008286621A JP 2009027762 A JP2009027762 A JP 2009027762A
- Authority
- JP
- Japan
- Prior art keywords
- motion vector
- motion
- blocks
- shape
- encoding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Abstract
動き補償画像符号化装置又は符号化方法において、動きベクトル決定のための演算処理量を軽減し、実時間で動画像情報の符号化処理を行うことを可能とする。
【解決手段】
動き補償画像符号化において、動きベクトルの検索(120)を、マクロブロック及びマクロブロックを分割したサブブロックについて整数画素精度で検索し(122)、その検索結果によって小数画素精度で動きベクトルの検索を行うべきブロック形状を形状モードとして決定し(124)、その形状モードのブロックについて少数画素精度で動きベクトルの検索を行って(125)、予測画像を得るため動きベクトルとする。
【選択図】 図1
Description
上記MPEG-4やH.264/AVC符号化方式では、1/2、1/4画素精度の動き補償予測が行われて
いる。1/2、1/4画素精度の動き補償予測とは、実際に得られる整数画素位置の画素を用いて内挿処理を行い、仮想的に1/2画素位置や1/4画素位置の画素値を作りだすことで動き予測精度を向上させる方法である。
従って本発明の目的は、動き補償画像符号化を行う際に、マクロブロック及び複数種のサブブロックの動きベクトルを整数精度及び小数画素精度で検索し、動きベクトルを探索する符号化方式において、画質を実質的に保持しながら、動きベクトル探索処理演算量の大幅な削減を実現する動き補償動画像符号化装置及び動き補償動画像符号化をコンピュータで実施させるためのプログラムを提供するものである。
本願の動き補償動画像符号化装置は、動きベクトル探索部が、第1の複数画素ブロック及び上記第1の複数画素ブロックを分割した複数種の形状の小ブロック(サブブロック)の動きベクトル探索を整数画素精度で行う第1の動きベクトル探索部と、上記第1の動きベクトル探索部で得られた情報を用いて、上記サブブロックの1ないし複数種を選択する形状モード選択部と、上記形状モード選択部で選択された1ないし複数種のサブブロックに対して小数画素精度の動きベクトル探索を行う第2の動きベクトル探索部をもつ。すなわち、小数画素精度の動きベクトル探索を行うブロック種別の決定を、第1の複数画素ブロック及び上記第1の複数画素ブロック分割した複数種の形状の小ブロック動きベクトルの探索を整数画素精度で行って得られた情報に基づいて実行する形状モード選択部とを持つ。
図1は本発明による動き補償画像符号化装置の一実施例の構成を示すブロック構成図を示す。同図に示すように、動き補償画像符号化装置は、画像情報のデータを記憶する原画像メモリ101、イントラ予測部102、符号化モード判定部103、直交変換部104、量子化部105、逆量子化部109、逆直交変換部110、逆イントラ処理部112、フレームメモリ113、ループ内フィルタ114、動き検出・動き補償部120、符号化部106、送信バッファ107、レート制御部108をもつ。
符号化モード判定部103では、イントラ予測部102で選択されたイントラモード符号化と動き検出・動き補償部120aで選択された情報を利用したインターモード符号化との符号化効率の高い方の符号化モードが選択される。符号化モード判定部103において選択された符号化対象信号すなわち画像の予測誤差信号は、直交変換部104、量子化部105、符号化部106、送信バッファ107へ伝送される。ここで、直交変換部104では、DCT等の直交変換が行われ、直交変換係数に変換する。直交変換係数は、量子部105で量子化処理が行われる。量子部105で量子化された変換係数は、符号化部106により、可変長符号化、算術符号化等の可逆符号化が行われた後、送信バッファ107に蓄積され、画像圧縮情報として出力される。
動き検出・動き補償部120aで検出された動きベクトル情報も符号化部106に送られ、可変長符号化、算術符号化等の可逆符号に変換される。動き検出・動き補償部120aで得られた予測画像は減算器115及び加算器116加えられる。減算器115では原画像と予測画像の差分が取られ、その残差成分情報は形状モード符号化選択時に利用される。
次に、本発明の主要部である動き検出・動き補償部120aの構成動作を図2,3及び4を参照して説明する。
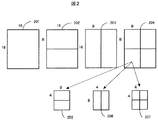
動き検出・動き補償部120aでは、動き探索制御部121の制御に従って、符号化対象画像ブロックと参照フレームメモリ113のからの参照画素データが整数画素精度動きベクトル探索制御部122に取り込まれる。整数画素精度動きベクトル探索制御部122では、図2に示すような複数種類のブロック201,202,203,204,0205,206、及び207(16 x 16のマクロブロック及び16x8(202)、8x16(203)、8x8(204)、4x8(205)、8x4(206))、4x4(207)画素の複数ブロック)のそれぞれについて整数画素精度の動きベクトルをブロックマッチング法に基づいた演算処理によって求める(図4、ステップ401)。この段階では、全部ロックに対してブロックマッチングの演算処理が行われるが、次に述べる仮想画素を作る内挿演算を必要としないので、演算は高速に行われる。図2の各ブロックの辺に示す数字は画素の行数及び列数を示す。
動き探索制御部121は小数画素精度動きベクトル探索部125に対し上記形状モード信号に対
応する形状のブロックの小数画素精度動きベクトル探索命令を送る(図4、ステップ405)。小数画素精度動きベクトル探索部125は上記形状モード信号に対応する形状のブロックを選択し、選択されたブロックの仮想画素を内挿処理演算によって作り、内挿処理演算によって求められる仮想画素を含む参照画素ブロックを生成する。そして原画像ブロックと仮想画素を含む参照画素ブロックとのブロックマッチング法によって小数画素精度の動きベクトル探索を行う(図4、ステップ405)。上記内挿処理演算によって求められる仮想画素の生成はフィルタ演算処理によって実現される。
フィルタ演算処理による輝度成分の1/2画素精度と1/4画素精度の仮想画素の生成ついて説明する。
ここで、roundは丸めを示す。数字5,20、などはフィルタ係数を示す。
さらに1/4画素精度のフィルタ演算においては、1/2画素精度で得られた仮想画素値の平均値をとって求められる。例えば、図2に示す1/4画素精度の仮想画素cc(302)は1/2画素c(301)とg(309)を用いて次式(数式2)の演算によって求められる。
一般的に、内挿処理演算はフィルタ処理のため、フィルタ係数が多いほど演算量も多くなる。
ここで、符号化コスト値はSADではなく、原画像と予測画像の二乗誤差の和(SSD)でも良い。ただし、SADやSSDだけではブロック形状の小さいモードが選択されやすくなり符号化効率が低下するため、動きベクトルの差分符号量を考慮した評価関数が一般的に用いられる。動きベクトルの差分符号量を考慮した評価関数を用いて符号化コスト値を求める際に利用する予測動きベクトルは、隣接ブロックの小数画素精度の動きベクトルが得られないときは、整数画素精度の動きベクトル情報を用いることにする。例えば、マクロブロック単位でパイプライン処理に基づいて整数画素精度の動きベクトル探索と小数画素精度の動きベクトル探索が異なるステージで符号化処理が行われる場合、図10に示すように、符号化対象マクロブロック(1002)の符号化コスト値計算に利用する周辺の動きベクトル情報A〜M(A〜Bの升目は4x4画素のブロック)のうち符号化対象マクロブロックの1つ前のマクロブロック(1001)のA〜Dのブロックは整数画素精度の動きベクトルしか用いることができない。そこで、本方法を用いることにより、ブロック形状モードの選択処理を小数画素精度の動きベクトル探索処理が終了するまで待つ必要がなく、整数画素精度の動きベクトル探索直後に実行できるため高速に符号化処理を行うことが可能となる。なお、整数画素精度の動きベクトル差分符号量と、小数画素精度の動きベクトル差分符号量はほぼ同等であるため、符号化コスト値の差はほとんど変わらず符号化性能低下への影響も小さい。本方法は、以下の実施例についても適用できる。
動き補償部126は、上記小数画素精度動きベクトル探索部125で選択された形状モードの小数画素精度の動きベクトル情報及び予測誤差情報を利用して予測画像を作成する。動きベクトル情報の一部は符号化部106に加えられ符号化される。また、予測画像は減算器115に加えられる。
<実施例2>
図5は本発明による動き補償画像符号化装置をCPUなどの信号処理装置を用いて構成した実施例の構成を示すブロック図である。図1の実施例1と同一機能ブロックについては図1と同一番号を付して説明を省く。図1に示したデータ伝送及び制御は図5に示す制御部502で行われる。また、原画像メモリ101、フレームメモリ113からのデータはDMA読出部509により読み込まれ、動き検出・動き補償部120へ伝送される。
<実施例3>
図6は本発明による動き補償画像符号化装置の他の実施例の構成を示すブロック図を示す。本実施例は、小数画素精度の動きベクトル探索を行う前に形状モードの選択を行うか行わないかの選択を行うようにしたものである。一般的に、画素精度を上げれば、動き補償予測による残差成分が小さくなり、その結果発生符号量が削減されるため、予測効率が高くなる。一方、画素精度を上げれば、それに伴うフィルタ処理が多くなり演算負荷も高くなる。
図7は、図6の実施例における動き検出・動き補償部120bの機能構成、処理の流れを示すフローチャート図である。同図において、整数画素精度の動きベクトル探索401、動きベクトル符号量算出402、符号化コスト値の算出403処理は、実施例1と同じであるが、形状モード選択処理は以下のように行う。
以上のように、本実施例では、入力画像サイズや符号化装置の性能によって、予測効率と演算負荷とのトレードオフを制御することで自由度の高い映像符号化を行うことができる。
<実施例4>
図8は本発明による動画像情報符号化装置の更に他の実施例の構成を示すブロック図である。本実施例は、小数画素精度の動きベクトル探索前に選択される選択される形状モードの数を決定する構成とした。すなわち、整数画素精度の動きベクトル探索終了後に複数の形状モードを選択するようにした動き補償動画像情報符号化装置である。前記実施例で説明した動画像情報符号化装置との違いは、形状モード数決定部801が追加された点である。図1に示した実施例1で説明した動画像符号化装置と実質的の同じ機能ブロックについては、図1に示した番号と同じ番号を付して、その詳細な説明を省く。具体的には、入力画像サイズに応じてn段階にわけ(ここでnはブロック形状モード数)、HDのような大きい画像においては、1モード、SDTV画像においては、2モードというように、画像サイズが大きいものから小さいものに対して選択する形状モード数を増やしていく。
形状モード数決定部801及び動き検出・動き補償部120cの構成及び処理の流れについて説明する。
上記形状モード数決定フラグの値は、例えばマクロブロック、スライス、フレーム、シーケンス単位で変更することができる。
入力画像サイズがHDのような非常に大きい場合でも、符号化処理装置の性能が非常に高い場合には、すべての形状モードに対して小数画素精度の動きベクトル探索はできなくても複数の形状モードに対してはできうる場合がある。しかし、実施例3では、整数画素精度の動きベクトル探索終了後に選択する形状モード数は1モードのみであったため、予測効率と演算負荷とのトレードオフを細かく制御することはできなかった。
一方、本実施例によれば、上記のような条件で符号化処理を行う場合においても、複数の形状モードに対して小数画素精度の動きベクトル探索を行うことが可能なため、予測効率と演算負荷とのトレードオフを細かく制御することができる。つまり、実施例3よりもさらに自由度の高い映像符号化を行うことが可能といえる。
尚、本願は、MPEG符号化方法以外であっても、複数種類の形状モードが想定されている動き補償を用いた符号化方法に適応することができ、処理量低減の効果を奏する。
104…直交変換部; 105…量子化部; 106…符号化部; 107…送信バッファ;
108…レート部制御; 109…逆量子化部; 110…逆直交変換部;
120…動き検出・動き補償部; 112…逆イントラ予測処理部; 113…フレームメモリ;
114…ループ内フィルタ; 115…減算器; 116…加算器;
601…形状モード選択切り換え処理部; 801…形状モード数決定部;
201…16x16モード; 202…16x8モード; 203…8x16モード;
204…8x8モード; 205…8x4モード; 206…4x8モード; 207…4x4モード;
301,309…1/2画素; 302…1/4画素; 303,304,305,306,307,308…整数画素;
501…CPU; 502…制御部;503…動き探索メモリ; 509…DMA読出部;
511…フィルタ演算部; 512…DMA書込部。
Claims (10)
- 動画像のフレームを分割したブロック単位で動き検索を行い、検索した動きベクトルを用いて動き補償予測を行い生成した予測画像と上記動画像との間の差分信号及び動き情報を符号化する動画像情報の符号化装置であって、
上記動き検索を行う動き検索部が、第1の複数画素ブロック及び上記第1の複数画素ブロックを分割した複数種の形状のサブブロックの動きベクトルの探索を整数画素精度で行う第1の動きベクトル探索部と、上記第1の動きベクトル探索部で得られた情報を用いて、上記複数種の形状ブロックの1ないし複数の形状を選択する形状モード選択部と、上記形状モード選択部で選択された1ないし複数のサブブロックに対して小数画素精度の動きベクトル探索を行う第2の動きベクトル探索部をもつことを特徴とする動画像情報の符号化装置。 - 請求項1記載の動画像情報の符号化装置において、形状モード選択部が上記第1の動きベクトル探索部による動きベクトルの各種形状ブロックの符号化コストを計算し、符号化コスト値が最小の形状を決める手段をもち、上記第2の動きベクトル探索部が上記符号化コスト値が最小の形状ブロックについて小数画素精度の動きベクトル探索を行うことを特徴とする動画像情報の符号化装置。
- 請求項1記載の動画像情報の符号化装置において、形状モード選択部が上記第1の動きベクトル探索部による動きベクトルの各種形状ブロックの符号化コスト値を計算し、符号化コスト値が小さい順に複数の形状を決める手段をもち、上記第2の動きベクトル探索部が上記複数の形状ブロックについて小数画素精度の動きベクトル探索を行い、上記複数の形状ブロックについて小数画素精度の動きベクトルによる各種形状ブロックの符号化コスト値を計算し、上記形状モード選択部がその符号化コスト値が最小の形状を決める手段を持つことを特徴とする動画像情報の符号化装置。
- 請求項1又は2記載の動画像情報の符号化装置であって、上記動き検索を行う動き検索部が第2の動きベクトル探索部を駆動するか否かを決定する制御を行う符号化モード選択切り換え処理部を有し、上記動き検索部は、第2の動きベクトル探索部を駆動しないと決定したとき、第2の動きベクトル探索部を駆動せず、全ての形状モードに対し小数画素精度の動きベクトル検索を行い、動きベクトルを決定する手段をもつことを特徴とする動画像情報の符号化装置。
- 請求項1ないし4の一つに記載の動画像情報の符号化装置において、上記記載の第1の複数画素ブロック葉16x16画素のマクロブロックであり、上記サブブロックは16x8画素、8x16画素、8x8画素、4x8画素、8x4画素、4x4画素のブロックであり、上記小数画素精度は1/2画素精度、1/4画素精度であることを特徴とする動画像情報の符号化装置。
- 動画像のフレームを分割したブロック単位で動き検索を行い、検索した動きベクトルをもちいて動き補償予測を行い生成した予測画像と上記動画像との間の差分信号及び動き情報を符号化する動画像情報の符号化手順をコンピュータに実行させるためのプログラムであって、
上記動き検索を行う手順が、第1の複数画素ブロック及び上記第1の複数画素ブロックを分割した複数種の形状のサブブロックの動きベクトルの探索を整数画素精度で行う第1のステップと、
上記第1のステップで得られた情報を用いて、上記複数種の形状ブロックの1ないし複数を選択する第2のステップと、
上記第2のステップで選択された1ないし複数のサブブロックに対して小数画素精度の動きベクトル探索を行う第3のステップをもつことを特徴とするプログラム。 - 請求項6記載の動画像情報のプログラムにおいて、上記第2のステップが符号化コストを計算し、その符号化コスト値が最小の形状ブロックを識別する形状モード情報を作る第4ステップを有することを特徴とするプログラム。
- 請求項6記載の動画像情報のプログラムにおいて、上記第2のステップが符号化コスト値を計算し、その符号化コスト値が小さい順に複数の形状ブロック種別を識別する第5ステップと、上記第5ステップで得られた複数の形状ブロッに対して小数画素精度の動きベクトル探索を行う第6のステップと、第6のステップで得られた動きベクトルによる符号化コスト値を計算し、その符号化コスト値が最小の形状ブロックを識別する形状モード情報を作る第7ステップを有することを特徴とするプログラム。
- 請求項67記載のプログラムにおいて、
上記第1のステップの後に第2のステップを行うか否かを決定するステップを有し、第2のステップを行うと決定したときは上記第2のステップを実行し、第2のステップを行わないと決定したときは全ての形状のサブブロックについて小数画素精度の動きベクトルの検索を行い動きベクトルを決める第7ステップと、第7ステップで決められた小数画素精度の動きベクトルの中で符号化コストの最小のものを選択する第8ステップとを有することを特徴とするプログラム。 - 請求項6ないし9の一つに記載のプログラムにおいて、上記第1の複数画素ブロックは16x16画素のマクロブロックであり、上記サブブロックは16x8画素、8x16画素、8x8画素、4x8画素、8x4画素、4x4画素のブロックであり、上記小数画素精度は1/2画素精度、1/4画素精度であることを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008286621A JP2009027762A (ja) | 2008-11-07 | 2008-11-07 | 動き補償画像符号化装置及び符号化方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008286621A JP2009027762A (ja) | 2008-11-07 | 2008-11-07 | 動き補償画像符号化装置及び符号化方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004352384A Division JP4317814B2 (ja) | 2004-12-06 | 2004-12-06 | 動画像情報の符号化装置及び符号化方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009027762A true JP2009027762A (ja) | 2009-02-05 |
| JP2009027762A5 JP2009027762A5 (ja) | 2009-03-19 |
Family
ID=40399048
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008286621A Pending JP2009027762A (ja) | 2008-11-07 | 2008-11-07 | 動き補償画像符号化装置及び符号化方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009027762A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011035569A (ja) * | 2009-07-30 | 2011-02-17 | Fujitsu Ltd | 動きベクトル検出装置及び動きベクトル検出方法 |
| KR101418104B1 (ko) * | 2010-03-08 | 2014-07-16 | 에스케이 텔레콤주식회사 | 움직임 벡터 해상도 조합을 이용한 움직임 벡터 부호화/복호화 방법 및 장치와 그를 이용한 영상 부호화/복호화 방법 및 장치 |
| KR101449683B1 (ko) * | 2009-10-30 | 2014-10-15 | 에스케이텔레콤 주식회사 | 움직임 벡터 해상도 제한을 이용한 움직임 벡터 부호화/복호화 방법 및 장치와 그를 이용한 영상 부호화/복호화 방법 및 장치 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11239354A (ja) * | 1998-02-23 | 1999-08-31 | Mitsubishi Electric Corp | 動きベクトル検出器 |
| JP2003284091A (ja) * | 2002-03-25 | 2003-10-03 | Toshiba Corp | 動画像符号化方法及び動画像符号化装置 |
| JP2004128749A (ja) * | 2002-09-30 | 2004-04-22 | Toshiba Corp | 動画像符号化方法及び復号化方法 |
| JP2004186897A (ja) * | 2002-12-02 | 2004-07-02 | Sony Corp | 動き予測補償方法及び動き予測補償装置 |
| JP2006100871A (ja) * | 2004-09-28 | 2006-04-13 | Sony Corp | 符号化装置、符号化方法、符号化方法のプログラム及び符号化方法のプログラムを記録した記録媒体 |
-
2008
- 2008-11-07 JP JP2008286621A patent/JP2009027762A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11239354A (ja) * | 1998-02-23 | 1999-08-31 | Mitsubishi Electric Corp | 動きベクトル検出器 |
| JP2003284091A (ja) * | 2002-03-25 | 2003-10-03 | Toshiba Corp | 動画像符号化方法及び動画像符号化装置 |
| JP2004128749A (ja) * | 2002-09-30 | 2004-04-22 | Toshiba Corp | 動画像符号化方法及び復号化方法 |
| JP2004186897A (ja) * | 2002-12-02 | 2004-07-02 | Sony Corp | 動き予測補償方法及び動き予測補償装置 |
| JP2006100871A (ja) * | 2004-09-28 | 2006-04-13 | Sony Corp | 符号化装置、符号化方法、符号化方法のプログラム及び符号化方法のプログラムを記録した記録媒体 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011035569A (ja) * | 2009-07-30 | 2011-02-17 | Fujitsu Ltd | 動きベクトル検出装置及び動きベクトル検出方法 |
| KR101449683B1 (ko) * | 2009-10-30 | 2014-10-15 | 에스케이텔레콤 주식회사 | 움직임 벡터 해상도 제한을 이용한 움직임 벡터 부호화/복호화 방법 및 장치와 그를 이용한 영상 부호화/복호화 방법 및 장치 |
| KR101418104B1 (ko) * | 2010-03-08 | 2014-07-16 | 에스케이 텔레콤주식회사 | 움직임 벡터 해상도 조합을 이용한 움직임 벡터 부호화/복호화 방법 및 장치와 그를 이용한 영상 부호화/복호화 방법 및 장치 |
| US9491480B2 (en) | 2010-03-08 | 2016-11-08 | Sk Telecom Co., Ltd. | Motion vector encoding/decoding method and apparatus using a motion vector resolution combination, and image encoding/decoding method and apparatus using same |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4317814B2 (ja) | 動画像情報の符号化装置及び符号化方法 | |
| KR102398644B1 (ko) | 인트라 예측 정보 부호화 방법 및 장치 | |
| EP3448038B1 (en) | Decoding method for intra predicting a block by first predicting the pixels at the boundary | |
| JP5266342B2 (ja) | 映像イントラ予測方法及び装置 | |
| KR101394209B1 (ko) | 영상의 인트라 예측 부호화 방법 | |
| JP2007053561A (ja) | 画像符号化装置および画像符号化方法 | |
| JP5795525B2 (ja) | 画像符号化方法,画像復号方法,画像符号化装置,画像復号装置,画像符号化プログラムおよび画像復号プログラム | |
| KR101033769B1 (ko) | 영상 데이터의 인트라 예측 모드 결정 방법 | |
| TWI511531B (zh) | 影像編碼裝置、影像編碼方法及影像編碼程式 | |
| JP2007013298A (ja) | 画像符号化装置 | |
| JP2009027762A (ja) | 動き補償画像符号化装置及び符号化方法 | |
| JP2007282014A (ja) | 画像データの生成方法 | |
| JP5887012B2 (ja) | 画像復号化方法 | |
| JP5886922B2 (ja) | 画像復号化方法 | |
| KR101475286B1 (ko) | 인트라 예측 방법 및 장치, 그리고 영상 처리 장치 | |
| JP5513333B2 (ja) | 動画像符号化装置、動画像符号化方法、およびプログラム | |
| JP5887013B2 (ja) | 画像復号化方法 | |
| JP5891333B2 (ja) | 画像復号化方法 | |
| JP5422681B2 (ja) | 画像復号化方法 | |
| JP4561701B2 (ja) | 動画像符号化装置 | |
| JP5298082B2 (ja) | 適応的に直交変換係数の走査順序を決定する符号化装置及び復号装置 | |
| KR20140076652A (ko) | 문턱값 기반 부호화 단위 분할을 이용한 고속 인트라 부호화 방법 및 장치 | |
| JP2013255290A (ja) | 画像復号化方法 | |
| JP2006191287A (ja) | 画像符号化装置、画像符号化方法および画像符号化プログラム | |
| WO2016017338A1 (ja) | 動画像符号化装置及び動画像復号装置並びに動画像符号化・復号方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081201 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090109 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20100510 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120105 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120508 |