JP2009019902A - Navigation apparatus - Google Patents
Navigation apparatus Download PDFInfo
- Publication number
- JP2009019902A JP2009019902A JP2007180949A JP2007180949A JP2009019902A JP 2009019902 A JP2009019902 A JP 2009019902A JP 2007180949 A JP2007180949 A JP 2007180949A JP 2007180949 A JP2007180949 A JP 2007180949A JP 2009019902 A JP2009019902 A JP 2009019902A
- Authority
- JP
- Japan
- Prior art keywords
- route
- map information
- gps signals
- current position
- received
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
- Navigation (AREA)
Abstract
Description
本発明は、ナビゲーション装置に関する。 The present invention relates to a navigation device.
従来、GPS(Global Positioning System:全地球測位システム)衛星からのGPS信号に基づいて現在位置を検出し、検出した現在位置を地図情報とともに、表示画面上に表示するナビゲーション装置が知られている。 2. Description of the Related Art Conventionally, a navigation device that detects a current position based on a GPS signal from a GPS (Global Positioning System) satellite and displays the detected current position on a display screen together with map information is known.
ところが、トンネル、地下、山間部、高架下等の地理的に電波の届きにくいエリアの走行中に、測位に必要なGPS信号を受信できない場合がある。そのため、特に、車速センサやジャイロセンサが搭載されていないポータブル型のナビゲーション装置等では、GPS信号が受信不能であると、自車位置を測位できないこととなる。 However, GPS signals necessary for positioning may not be received while traveling in areas where radio waves are difficult to reach, such as tunnels, underground, mountainous areas, and underpasses. Therefore, in particular, in a portable navigation device or the like that is not equipped with a vehicle speed sensor or a gyro sensor, if the GPS signal cannot be received, the vehicle position cannot be measured.
ここで、図6を参照しながら、従来のナビゲーション装置において、GPS信号が受信できなくなる場合の具体例について説明する。
従来型のナビゲーション装置を搭載する車両は、図6(a)に太線で示す経路の走行しているものとする。そして、例えば、図中のC点において、現在位置の測位に必要な所定数以上のGPS信号が受信できなくなる。すると、GPS信号が受信できなくなった時点で、表示部上の地図表示が、図6(b)の状態で停止する。図6(b)は、図6(a)中のF枠部分の地図情報である。
その後、車両が経路に沿って引き続き走行し、例えば、図中のD点において、所定数以上のGPS信号が再び受信可能となる。すると、受信したGPS信号に基づいて車両の現在位置が検出され、表示部上の地図表示が、図6(c)の画面に切り替わる。図6(c)は、図6(a)中のG枠部分の地図情報である。
この例のように、GPS信号を受信できない間(図6(a)におけるC点D点間)に移動した距離が大きいと、再度、GPS信号が受信可能となって地図表示が行われた際に、突然表示部上に表示される地図が大きくスクロールされる場合がある。このような場合には、ユーザはどの位置からどのような経路を辿って移動したのかが分からず、現在位置を把握できない恐れがある。
Here, with reference to FIG. 6, a specific example in the case where GPS signals cannot be received in a conventional navigation device will be described.
Assume that a vehicle equipped with a conventional navigation device is traveling along a route indicated by a thick line in FIG. For example, at a point C in the figure, a predetermined number or more of GPS signals necessary for positioning of the current position cannot be received. Then, when the GPS signal can no longer be received, the map display on the display unit stops in the state of FIG. FIG. 6B is map information of the F frame portion in FIG.
Thereafter, the vehicle continues to travel along the route, and, for example, a predetermined number or more of GPS signals can be received again at point D in the figure. Then, the current position of the vehicle is detected based on the received GPS signal, and the map display on the display unit is switched to the screen of FIG. FIG. 6C is map information of the G frame portion in FIG.
As shown in this example, when the distance traveled while GPS signals cannot be received (between points C and D in FIG. 6A) is large, GPS signals can be received again and map display is performed. In addition, the map displayed on the display unit may be scrolled greatly. In such a case, there is a possibility that the user does not know what route the user has traveled from which position and cannot grasp the current position.
そこで、例えば、特許文献1には、センタ側との通信状況が通信不良又は通信不能である場合に、最初に送信された全経路描画データによる経路全体を移動側で表示するナビゲーション装置が開示されている。これにより、通信状態にかかわらず車両の現在位置を確認することができる。
また、例えば、特許文献2のナビゲーション装置では、予め尺度の小さい地図情報を記憶しておき、詳細な部分地図情報を受信しなければならない地点が通信不可能な領域である場合に、予め記憶しておいた尺度の小さい地図情報が表示されるため、地図情報の表示が途切れることがなくなる。
In addition, for example, in the navigation device of
しかしながら、上記特許文献1のように、通信状態に応じて画面が切り替わると、画面を見ているユーザに不快感を与える恐れがあるとともに、全経路を含む広域地図では、案内経路や付近の状況を確認することが難しく、経路案内として不十分であるという問題があった。また、特許文献2のように、単に予め保持している地図情報が表示されるだけでは、実際のユーザの位置を含む地図情報が表示されない可能性があり、適切な経路案内を行うことができない場合がある。
However, when the screen is switched according to the communication state as in
本発明の課題は、現在位置の検出に要するGPS信号を受信できない場合であっても、より適切な経路案内を行うことができるナビゲーション装置を提供することである。 The subject of this invention is providing the navigation apparatus which can perform more suitable route guidance, even when it is a case where the GPS signal required for the detection of the present position cannot be received.
上記課題を解決するため、請求項1に記載の発明は、ナビゲーション装置において、地図情報を取得する地図情報取得手段と、
GPS信号を受信する受信手段と、
前記受信手段により受信された前記GPS信号に基づいて、現在位置を検出する現在位置検出手段と、
目的地までの経路を探索する経路探索手段と、
前記現在位置検出手段により検出される前記現在位置を含む地図情報を表示部に表示して、前記経路探索手段により探索された前記経路に関する経路案内を行う経路案内手段と、
を備え、
前記経路案内手段は、前記受信手段により所定数以上の前記GPS信号が受信できない間、所定数以上の前記GPS信号が受信できなくなった位置を含む地図情報を、時間の経過とともに次第に広域表示に変更して、前記表示部に表示させることを特徴とする。
In order to solve the above-mentioned problem, the invention according to
Receiving means for receiving GPS signals;
A current position detecting means for detecting a current position based on the GPS signal received by the receiving means;
A route search means for searching for a route to the destination;
Route guidance means for displaying the map information including the current position detected by the current position detection means on a display unit and performing route guidance regarding the route searched by the route search means;
With
The route guidance means gradually changes the map information including the position where the predetermined number or more of the GPS signals cannot be received to the wide area display as time passes while the reception means cannot receive the predetermined number or more of the GPS signals. And it is displayed on the said display part, It is characterized by the above-mentioned.
請求項2に記載の発明は、請求項1に記載のナビゲーション装置において、前記受信手段により所定数以上の前記GPS信号が受信できない間、前記経路探索手段により探索された経路に沿って、所定の速度で移動した場合の仮想位置を、所定数以上の前記GPS信号が受信できなくなった時点からの経過時間に基づいて算出する算出手段を備え、
前記経路案内手段は、前記受信手段により所定数以上の前記GPS信号が受信できない間、所定数以上の前記GPS信号が受信できなくなった位置を含む地図情報を、前記算出手段により算出された前記仮想位置を含むように、時間の経過とともに次第に広域表示に変更することを特徴とする。
According to a second aspect of the present invention, in the navigation device according to the first aspect, the predetermined number or more of the GPS signals cannot be received by the receiving unit, and the predetermined number of GPS signals are determined along the route searched by the route searching unit. A calculation means for calculating a virtual position when moving at a speed based on an elapsed time from a point when a predetermined number or more of the GPS signals cannot be received;
The route guidance unit is configured to calculate the map information including the position where the predetermined number or more of the GPS signals cannot be received while the reception unit cannot receive the predetermined number or more of the GPS signals. It is characterized by gradually changing to wide area display as time passes so as to include the position.
請求項3に記載の発明は、ナビゲーション装置において、地図情報を取得する地図情報取得手段と、
GPS信号を受信する受信手段と、
前記受信手段により受信された前記GPS信号に基づいて、現在位置を検出する現在位置検出手段と、
目的地までの経路を探索する経路探索手段と、
前記現在位置検出手段により検出される前記現在位置を含む地図情報を表示部に表示して、前記経路探索手段により探索された前記経路に関する経路案内を行う経路案内手段と、
移動速度を検出する速度検出手段と、
前記受信手段により所定数以上の前記GPS信号が受信できない間、前記経路探索手段により探索された経路に沿って、前記速度検出手段により検出される速度で移動した場合の仮想位置を、所定数以上の前記GPS信号が受信できなくなった時点からの経過時間に基づいて算出する算出手段と、
を備え、
前記経路案内手段は、前記受信手段により所定数以上の前記GPS信号が受信できない間、所定数以上の前記GPS信号が受信できなくなった位置を含む地図情報を、前記算出手段により算出された前記仮想位置を含むように、時間の経過とともに次第に広域表示に変更することを特徴とする。
The invention according to
Receiving means for receiving GPS signals;
A current position detecting means for detecting a current position based on the GPS signal received by the receiving means;
A route search means for searching for a route to the destination;
Route guidance means for displaying the map information including the current position detected by the current position detection means on a display unit and performing route guidance regarding the route searched by the route search means;
Speed detecting means for detecting the moving speed;
While the predetermined number or more of the GPS signals cannot be received by the receiving unit, the virtual position when moving at the speed detected by the speed detecting unit along the route searched by the route searching unit is a predetermined number or more. Calculating means for calculating based on the elapsed time from the time point when the GPS signal cannot be received;
With
The route guidance unit is configured to calculate the map information including the position where the predetermined number or more of the GPS signals cannot be received while the reception unit cannot receive the predetermined number or more of the GPS signals. It is characterized by gradually changing to wide area display as time passes so as to include the position.
本発明によれば、地図情報取得手段により、地図情報が取得され、受信手段によりGPS信号が受信され、現在位置検出手段により、受信手段により受信されたGPS信号に基づいて、現在位置が検出され、経路探索手段により、目的地までの経路が探索され、経路案内手段により、現在位置検出手段により検出される現在位置を含む地図情報が表示部に表示され、経路探索手段により探索された経路に関する経路案内が行われる。また、経路案内手段により、受信手段により所定数以上のGPS信号が受信できない間、所定数以上のGPS信号が受信できなくなった位置を含む地図情報が、時間の経過とともに次第に広域表示に変更されて、表示部に表示される。
すなわち、所定数以上のGPS信号が受信できずに現在位置が検出できなくなった場合には、所定数以上のGPS信号が受信できなくなった位置を地図情報上で把握することができる。また、ナビゲーション装置の位置している可能性の高い位置を含むとともに、所定数以上のGPS信号が受信できなくなった位置の周辺の状況を把握することができる地図情報が表示される。したがって、現在位置の検出に要するGPS信号を受信できない場合であっても、より適切な経路案内が行われることとなる。
According to the present invention, the map information is acquired by the map information acquisition means, the GPS signal is received by the reception means, and the current position is detected by the current position detection means based on the GPS signal received by the reception means. The route search means searches for a route to the destination, the route guidance means displays the map information including the current position detected by the current position detection means on the display unit, and relates to the route searched by the route search means. Route guidance is performed. In addition, the map information including the position where the predetermined number or more of the GPS signals cannot be received is gradually changed to the wide area display by the route guidance means while the predetermined number or more of the GPS signals cannot be received by the receiving means. Is displayed on the display unit.
That is, when the current position cannot be detected because a predetermined number or more of GPS signals cannot be received, the position where the predetermined number or more of GPS signals cannot be received can be grasped on the map information. In addition, map information that includes a position where the navigation device is likely to be located and can grasp the situation around the position where a predetermined number or more of GPS signals cannot be received is displayed. Therefore, even when the GPS signal required for detecting the current position cannot be received, more appropriate route guidance is performed.
以下、本発明の実施の形態について、図面を参照しながら説明を行う。
本実施形態のナビゲーション装置は、例えば、車両等に搭載されるポータブル型のナビゲーション装置であり、地図情報や、目的地までの経路案内等の各種情報を、ユーザに提供する。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
The navigation device of this embodiment is a portable navigation device mounted on a vehicle or the like, for example, and provides various information such as map information and route guidance to a destination to the user.
まず、ナビゲーション装置100の要部構成について、図1を参照しながら説明する。
ナビゲーション装置100は、例えば、装置本体内に、受信手段としてのGPSアンテナ部1、現在位置検出手段としての現在位置検出部2、速度検出手段としての加速度センサ3、通信部4、表示部5、入力部6、制御部7等を備えて構成されている。
First, the configuration of the main part of the
The
GPSアンテナ部1は、既知の位置にある複数(例えば、3次元座標の検出の場合には、少なくとも4つ)の人工衛星から発信されるGPS信号を受信する。
The
現在位置検出部2は、例えば、GPSアンテナ部1により受信された、複数の人工衛星から発信されたGPS信号に含まれる時間情報から、各人工衛星における各GPS信号の発信時間を求め、発信時間から受信時間の差に基づいて、各人工衛星までの距離を算出する。そして、各人工衛星までの距離と、GPS信号発信時における各人工衛星の位置に基づいて、ナビゲーション装置100の座標(緯度・経度・高度)を現在位置情報として取得する。さらに、取得した現在位置情報に基づく現在位置検出信号を制御部7に出力する。
The current
加速度センサ3は、例えば、3軸加速度センサ3から構成され、当該加速度センサ3を備えるナビゲーション装置100に生じる振動を検出し、振動の振幅の大きさに応じた検出信号を制御部7に出力する。
The
通信部4は、例えば、図示しない情報提供装置とネットワーク接続されており、ネットワークを介して情報提供装置から送信された各種情報を受信する。 For example, the communication unit 4 is connected to an information providing apparatus (not shown) via a network, and receives various types of information transmitted from the information providing apparatus via the network.
表示部5は、例えば、LCD(Liquid Crystal Display)等のディスプレイを備えて構成され、制御部7からの制御に応じて、地図情報その他の各種情報を当該ディスプレイに表示させる。
The
入力部6は、例えば、文字/数字キー、各種機能キー、表示部5と一体的に構成されたタッチパネル等から構成され、ユーザが、目的地点や出発地点等の各種情報の入力を行う。
具体的には、入力部6は、ユーザによるキーの押下に基づくキー押下信号を制御部7に出力するとともに、タッチパネルにおいてユーザによりタッチ操作が行われると、当該タッチ操作された座標を算出し、算出した座標に基づく押下信号を制御部7に出力する。
The
Specifically, the
制御部7は、CPU(Central Processing Unit)71、RTC(Real Time Clock)72、メモリ部73、ROM(Read Only Memory)74等を備えて構成されている。
The
CPU71は、ナビゲーション装置100の各部から入力された入力信号等に応じて、ROM74に格納された各種プログラムを実行するとともに、実行にかかるプログラムに基づいて各部に出力信号を出力することにより、ナビゲーション装置100の動作全般を統括制御する。
The
RTC72は、現在時刻をカウントし、カウントした現在時刻をCPU71に対して出力する。
The
メモリ部73は、例えば、RAM(Random Access Memory)等の揮発性メモリからなるワークエリア731を備えており、CPU71によって各種プログラムが実行される際に生じる処理結果や、入力されたデータ等をこのワークエリア731に記憶させる。
The
また、メモリ部73は、例えば、EPROM(Erasable Programmable ROM)等の不揮発性メモリからなるデータエリア732を備えている。データエリア732には、例えば、地図情報を記憶する地図情報DB732aが備わる。
In addition, the
地図情報DB732aは、例えば、種類や縮尺の異なる地図情報を階層構造で格納する。
具体的には、地図情報DB732aには、例えば、高速自動車国道や一般国道が収録された広域地図、広域地図で表示される道路に加えて都道府県道や市町村道が収録された中域地図、中域地図で表示される道路に加えて細街路が収録された詳細地図等が、複数の階層に格納されている。
この地図情報は、道路情報の他、住所情報や、建物情報、施設情報、店舗情報、公園情報、地形情報、路線情報等を含んでいる。また、道路情報にはノード情報及びリンク情報が含まれる。リンク情報は、ノードとノードを結ぶ線分であるリンクを規定するものである。リンク情報は、例えば、各リンク固有のリンクID、リンクの端点(始点・終点)であるノードの座標、リンクの長さを示すリンク長、道路名称、道路種別、幅員、車線数、交通規制、リンクの端点であるノードに接続されるリンクのリンクID、リンクの平均通過時間等から構成される。また、ノード情報は、リンクの交点(交差点)・リンクの端点(行き止まり)・リンクの属性が変わる点(例えば、高速自動車国道→都道府県道)を規定するものであり、例えば、各ノード固有のノードID、ノードの座標、交差点名称、ノードに接続されるリンクのリンクID等から構成される。
また、地図情報は、随時、ネットワークを介して情報提供装置(図示省略)からダウンロードした最新の地図情報に更新されるようになっている。
For example, the
Specifically, the
This map information includes address information, building information, facility information, store information, park information, terrain information, route information and the like in addition to road information. The road information includes node information and link information. The link information defines a link that is a line segment connecting nodes. The link information includes, for example, a link ID unique to each link, the coordinates of the node that is the end point (start point / end point) of the link, the link length indicating the link length, the road name, the road type, the width, the number of lanes, the traffic regulation, It consists of the link ID of the link connected to the node that is the end point of the link, the average transit time of the link, and the like. The node information specifies link intersections (intersections), link end points (dead ends), and points where link attributes change (for example, highway national highways → prefectural roads). It is composed of a node ID, node coordinates, intersection name, link ID of a link connected to the node, and the like.
Also, the map information is updated to the latest map information downloaded from an information providing device (not shown) via a network as needed.
ROM74は、例えば、不揮発性メモリから成るプログラム格納エリアを有しており、具体的には、現在位置検出プログラム74a、地図情報取得プログラム74b、経路探索プログラム74c、速度検出プログラム74d、算出プログラム74e、経路案内プログラム74f等を格納している。
The
現在位置検出プログラム74aは、例えば、CPU71に、GPSアンテナ部1により受信されたGPS信号に基づいて、現在位置を検出する機能を実現させるためのプログラムである。
具体的には、CPU71は、複数の人工衛星から発信される所定数以上のGPS信号が、GPSアンテナ部1により受信されると、現在位置検出部2にGPS信号に基づくナビゲーション装置100の現在位置情報を取得させ、当該現在位置検出部2から出力される現在位置検出信号に基づいて、現在位置としての座標(緯度・経度・高度)を特定する。
CPU71は、かかる現在位置検出プログラム74aを実行することにより、現在位置検出部2とともに現在位置検出手段として機能する。
The current
Specifically, when a predetermined number or more of GPS signals transmitted from a plurality of artificial satellites are received by the
The
地図情報取得プログラム74bは、例えば、CPU71に、地図情報を取得する機能を実現させるためのプログラムである。
具体的には、CPU71は、後述の経路探索プログラム74cの実行による経路探索処理や、経路案内プログラム74fの実行による経路案内処理に際して、現在位置検出プログラム74aの実行により特定されるナビゲーション装置100の現在位置と、探索プログラムの実行により探索された経路と、を含む所定範囲の地図情報を、地図情報DB732aから検索して取得する。
CPU71は、かかる地図情報取得プログラム74bを実行することにより、地図情報取得手段として機能する。
The map
Specifically, the
The
経路探索プログラム74cは、例えば、CPU71に、目的地までの経路を探索する機能を実現させるためのプログラムである。
具体的には、CPU71は、経路探索プログラム74cの実行に際して、目的地等の探索条件を指定させるための画面を表示部5に表示させる。ユーザは、入力部6を操作して、目的地に関する目的地情報等を入力して経路探索の条件を指定すると、CPU71は、入力された条件に基づいて、現在位置検出プログラム74aの実行により検出されるナビゲーション装置100の現在位置から、指定された目的地までの経路を探索する。経路探索の方法としては、例えば、従来用いられているダイクストラ法等を用いる。
CPU71は、かかる経路探索プログラム74cを実行することにより、経路探索手段として機能する。
The
Specifically, when executing the
The
速度検出プログラム74dは、例えば、CPU71に、移動速度を検出する機能を実現させるためのプログラムである。
具体的には、GPSアンテナ部1は、ナビゲーション装置100を搭載する車両の移動中に、人工衛星から発信されるGPS信号を受信する。そして、トンネル、地下、山間部、高架下等の地理的に電波の届きにくいエリアにおいて、GPSアンテナ部1が所定数以上のGPS信号を受信できなくなると、加速度センサ3から出力される検出信号に基づいて、検出された加速度を積分することにより、ナビゲーション装置100の移動速度を検出する。
CPU71は、かかる速度検出プログラム74dを実行することにより、加速度センサ3とともに、速度検出手段として機能する。
The
Specifically, the
The
なお、本発明において、「所定数以上のGPS信号が受信できない」とは、ナビゲーション装置100の現在位置の測位に必要な数のGPS信号が受信できない場合を指し、具体的には、例えば、1つ又は2つのGPS信号が受信可能である場合も含まれる。
In the present invention, “a predetermined number or more of GPS signals cannot be received” refers to a case where the number of GPS signals necessary for positioning of the current position of the
算出プログラム74eは、例えば、CPU71に、GPSアンテナ部1により所定数以上のGPS信号が受信できない間、経路探索プログラム74cの実行により探索された経路に沿って、速度検出プログラム74dの実行により検出される移動速度で移動した場合の仮想位置を、所定数以上のGPS信号が受信できなくなった時点からの経過時間に基づいて、算出する機能を実現させるためのプログラムである。
具体的には、CPU71は、GPSアンテナ部1において所定数以上のGPS信号が受信されなくなると、探索された経路に沿って、速度検出プログラム74dの実行により検出される移動速度で移動した場合の仮想的な位置を求める。
CPU71は、かかる算出プログラム74eを実行することにより、算出手段として機能する。
The
Specifically, when the
The
経路案内プログラム74fは、例えば、CPU71に、現在位置検出プログラム74aの実行により検出される現在位置を含む地図情報を表示部5に表示して、経路探索プログラム74cの実行により探索された経路に関する経路案内を行う機能を実現させるためのプログラムである。具体的には、経路案内プログラム74fは、GPSアンテナ部1により所定数以上のGPS信号が受信できない間、所定数以上のGPS信号が受信できなくなった位置を含む地図情報を、算出プログラム74eの実行により算出された仮想位置を含むように、時間の経過とともに次第に広域表示に変更する。
具体的には、経路探索プログラム74cの実行により経路が探索されると、CPU71は、ナビゲーション装置100の現在位置と、経路の一部(又は、全部)と、を含む地図情報を表示部5に表示する。CPU71は、この地図における探索された経路の道路を、他の道路と異なる態様で示して、探索された経路の経路案内を行う。
そして、車両の走行中、所定数以上のGPS信号が受信される区間では、CPU71は、受信したGPS信号に基づいて、前述の現在位置検出プログラム74aの実行によりナビゲーション装置100の現在位置を検出させる。そして、検出された現在位置と案内経路とを含む地図情報を表示部5に表示させ、現在位置を地図上にプロットして、地図上におけるナビゲーション装置100の現在位置を示す。
そして、車両の走行中、所定数以上のGPS信号が受信できなくなると、CPU71は、所定数以上のGPS信号を受信できなくなった位置を含む地図情報を表示部5に表示させる。そして、所定数以上のGPS信号が受信できなくなった時点の位置と、前述の算出プログラム74eの実行により算出される移動速度で、探索された経路に沿って車両が移動した場合の地図上における仮想位置との両方を含むように、表示部5に表示された地図情報を、時間が経過するにつれて次第に表示領域が広域となるように、表示縮尺を変更する。
CPU71は、かかる経路案内プログラム74fを実行することにより、経路案内手段として機能する。
The
Specifically, when the route is searched by executing the
In a section where a predetermined number or more of GPS signals are received while the vehicle is traveling, the
When the predetermined number or more of GPS signals cannot be received while the vehicle is traveling, the
The
ここで、図2〜図4を参照しながら、現在位置検出プログラム74a、速度検出プログラム74d、算出プログラム74e、経路案内プログラム74fの実行による経路案内処理について説明する。
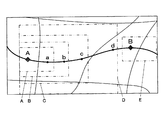
例えば、探索プログラムの実行により探索された経路は、図2に太線で示す経路であり、ナビゲーション装置100が搭載される車両は、この経路に沿って走行しているものとする。
CPU71は、現在位置検出部2からの現在位置検出信号に基づいて、ナビゲーション装置100の現在位置を検出し、例えば、車両の現在位置が、図2中のA点であることを検出すると、CPU71は、図3(a)に示すように、現在位置と探索された経路の一部とを含む地図情報を表示させる。図3(a)は、図2中のA枠部分の地図情報である。
そして、例えば、このA点において、所定数以上のGPS信号が受信できなくなる。すると、CPU71は、加速度センサ3からの検出信号に基づいて、ナビゲーション装置100の移動速度を検出する。
Here, the route guidance processing by executing the current
For example, it is assumed that the route searched by executing the search program is a route indicated by a thick line in FIG. 2, and the vehicle on which the
The
For example, at this point A, a predetermined number or more of GPS signals cannot be received. Then, the
次に、CPU71は、車両が、図2に太線で示す経路に沿って、検出される移動速度で走行した場合の地図上における仮想位置を、検出される移動速度及びGPS信号が受信できなくなった時点からの経過時間に基づいて算出する。そして、算出された仮想位置が、表示部5に表示されている地図情報に含まれているか否かを判断する。算出された仮想位置が表示部5に表示されている地図情報に含まれていない場合には、所定数以上のGPS信号が受信できなくなった時点の位置と、当該仮想位置との両方を含むように、表示部5の地図情報の表示縮尺を変更して、より広域な地図情報を表示させる。また、CPU71は、地図上における所定数以上のGPS信号が受信できなくなった位置と仮想位置とに、それぞれ異なるマークを表示させる。CPU71は、所定数以上のGPS信号が再受信されるまで、この処理を繰り返し実行する。
Next, the
例えば、図3(b)は、所定数以上のGPS信号が受信できなくなってから1分が経過した時点において、算出した仮想位置が、図2中のa点である場合に、表示部5に表示される地図情報である。図3(b)は、図2中のA枠部分の地図情報である。
また、図3(c)は、所定数以上のGPS信号が受信できなくなってから2分が経過した時点において、算出した仮想位置が、図2中のb点である場合に、表示部5に表示される地図情報であり、図3(b)の地図情報よりも広域表示に変更されている。図3(c)は、図2中のB枠部分の地図情報である。
また、図4(a)は、所定数以上のGPS信号が受信できなくなってから3分が経過した時点において、算出した仮想位置が、図2中のc点である場合に、表示部5に表示される地図情報であり、図3(c)の地図情報よりも広域表示に変更されている。図4(a)は、図2中のC枠部分の地図情報である。
また、図4(b)は、所定数以上のGPS信号が受信できなくなってから5分が経過した時点において、算出した仮想位置が、図2中のd点である場合に、表示部5に表示される地図情報であり、図4(a)の地図情報よりも広域表示に変更されている。図4(b)は、図2中のD枠部分の地図情報である。
図3(a)〜(c)、図4(a)(b)のように、ナビゲーション装置100において現在位置の測位に必要な所定数以上のGPS信号が受信できなくなると、表示部5に、次第に広域表示に表示縮尺が変更される地図情報が表示される。また、この地図情報では、所定数以上のGPS信号が受信できなくなった位置と、経路に沿ってそのまま走行を継続した場合の仮想位置とに、マークが表示される。
For example, FIG. 3B shows the
FIG. 3C shows the
FIG. 4A shows the
FIG. 4B shows the
As shown in FIGS. 3A to 3C and FIGS. 4A and 4B, when the
また、その後、例えば、図2中のB点において、所定数以上のGPS信号が再び受信可能となる。すると、CPU71は、受信したGPS信号に基づいてナビゲーション装置100の現在位置を検出し、図4(c)に示すように、検出した現在位置を含む地図情報を、元の表示縮尺(すなわち、GPS信号が受信できなくなる直前の表示縮尺)で表示部5に表示させる。図4(c)は、図2中のE枠部分の地図情報である。
Further, for example, at a point B in FIG. 2, a predetermined number or more of GPS signals can be received again. Then, the
次に、図5のフローチャートを参照しながら、ナビゲーション装置100において行われる経路案内処理について説明する。
まず、ステップS1において、CPU71は、GPSアンテナ部1により所定数以上のGPS信号が受信可能であるか否かを判断する。CPU71は、ステップS1において、GPSアンテナ部1により所定数以上のGPS信号が受信可能であると判断すると(ステップS1;Yes)、ステップS2において、受信したGPS信号に基づいて、ナビゲーション装置100の現在位置としての座標を特定し、ステップS3において、検出した現在位置と、探索された経路とを含む地図情報を、地図情報DB732aから検索して取得する。さらに、ステップS4において、地図情報DB732aから取得した、ナビゲーション装置100の現在位置及び探索された経路を含む地図情報を表示部5に表示させ、経路案内を行い、ステップS1に戻って以上の処理を繰り返す。
一方、CPU71は、ステップS1において、GPSアンテナ部1により、所定数以上のGPS信号が受信できないと判断すると(ステップS1;No)、ステップS5において、加速度センサ3から出力される検出信号に基づいて、ナビゲーション装置100の移動速度を検出する。ステップS6において、CPU71は、探索された経路に沿って、検出された移動速度で移動した場合における仮想位置を、所定数のGPS信号が受信できなくなった時点からの経過時間に基づいて算出する。そして、ステップS7において、GPS信号が受信できなくなった位置と算出された仮想位置との両方を含むように、表示部5の地図情報を広域表示に変更し、ステップS1に戻って以上の処理を繰り返す。
Next, route guidance processing performed in the
First, in step S <b> 1, the
On the other hand, when the
以上説明した本実施形態におけるナビゲーション装置100によれば、地図情報取得プログラム74bの実行により地図情報が取得され、GPSアンテナ部1により、GPS信号が受信され、現在位置検出プログラム74aの実行により、GPSアンテナ部1により受信されたGPS信号に基づいて、現在位置が検出され、経路探索プログラム74cの実行により、目的地までの経路が探索され、経路案内プログラム74fの実行により、現在位置検出プログラム74aの実行により検出される現在位置を含む地図情報が表示部5に表示されて、経路探索プログラム74cの実行により探索された経路に関する経路案内が行われ、速度検出プログラム74dの実行により、移動速度が検出され、算出プログラム74eの実行により、所定数以上のGPS信号が受信できなくなった位置から、経路探索プログラム74cの実行により探索された経路に沿って、速度検出プログラム74dの実行により検出される速度で移動した場合の仮想位置が、所定数以上のGPS信号が受信できなくなった時点からの経過時間に基づいて算出され、経路案内プログラム74fの実行により、GPSアンテナ部1により所定数以上のGPS信号が受信できない間、所定数以上のGPS信号が受信できなくなった位置を含む地図情報が、算出プログラム74eの実行により算出された仮想位置を含むように、時間の経過とともに次第に広域表示に変更される。
すなわち、所定数以上のGPS信号が受信できずに現在位置が検出できなくなった場合には、所定数以上のGPS信号が受信できなくなった位置を地図情報上で把握することができる。また、ナビゲーション装置の位置している可能性の高い位置を含むとともに、所定数以上のGPS信号が受信できなくなった位置の周辺の状況を把握することができる地図情報が表示される。したがって、現在位置の検出に要するGPS信号を受信できない場合であっても、より適切な経路案内が行われることとなる。
また、探索された経路に沿って検出された移動速度で移動した場合の仮想位置が算出され、算出された仮想位置を含むように地図情報が変更されるため、現在位置を検出できない間も、よりナビゲーション装置100の位置している可能性の高い位置を含む地図情報を表示部5に表示させることができ、ユーザにとってより適切な経路案内を行うことができる。
According to the
That is, when the current position cannot be detected because a predetermined number or more of GPS signals cannot be received, the position where the predetermined number or more of GPS signals cannot be received can be grasped on the map information. In addition, map information that includes a position where the navigation device is likely to be located and can grasp the situation around the position where a predetermined number or more of GPS signals cannot be received is displayed. Therefore, even when the GPS signal required for detecting the current position cannot be received, more appropriate route guidance is performed.
In addition, since the virtual position when moving at the detected moving speed along the searched route is calculated and the map information is changed to include the calculated virtual position, while the current position cannot be detected, Further, map information including a position where the
なお、本発明は、上記実施の形態に限られることなく、本発明の趣旨を逸脱しない範囲において、種々の改良並びに設計の変更を行っても良い。
例えば、地図情報DB732aの記憶媒体は、ハードディスクや、CD−ROM、DVD等、光学的、磁気的、半導体メモリ等の何れの記憶媒体で構成しても良い。また、固定的に設けたもの(例えば、磁気テープ、ハードディスク等)でも良く、着脱自在に設けたもの(例えば、FD、MO、DVD等)であっても良い。
また、経路案内手段は、現在位置の検出が不可能な間、探索された経路全体の地図も併せて表示させても良い。
また、仮想位置は、予め定められた速度(例えば、50km/h)で移動した場合における位置であっても良い。さらに、通行中の道路の種別毎に予め定められた速度で移動した場合における仮想位置を算出しても良い。当該道路の種別には、例えば、一般道路・高速道路等の道路の種類の他、道路の幅員、車線数、リンク情報に含まれる平均通過時間等が含まれる。
The present invention is not limited to the above embodiment, and various improvements and design changes may be made without departing from the spirit of the present invention.
For example, the storage medium of the
The route guidance means may also display a map of the entire searched route while the current position cannot be detected.
The virtual position may be a position when moving at a predetermined speed (for example, 50 km / h). Furthermore, the virtual position when moving at a predetermined speed for each type of road that is passing may be calculated. The type of the road includes, for example, the road width, the number of lanes, the average passage time included in the link information, and the like in addition to the types of roads such as general roads and highways.
100 ナビゲーション装置
1 GPSアンテナ部(受信手段)
2 現在位置検出部(現在位置検出手段)
3 加速度センサ(速度検出手段)
5 表示部
71 CPU(現在位置検出手段、地図情報取得手段、経路探索手段、速度検出手段、算出手段、経路案内手段)
74a 現在位置検出プログラム(現在位置検出手段)
74b 地図情報取得プログラム(地図情報取得手段)
74c 経路探索プログラム(経路探索手段)
74d 速度検出プログラム(速度検出手段)
74e 算出プログラム(算出手段)
74f 経路案内プログラム(経路案内手段)
100
2 Current position detector (current position detection means)
3 Acceleration sensor (speed detection means)
5
74a Current position detection program (current position detection means)
74b Map information acquisition program (map information acquisition means)
74c Route search program (route search means)
74d Speed detection program (speed detection means)
74e Calculation program (calculation means)
74f Route guidance program (route guidance means)
Claims (3)
GPS信号を受信する受信手段と、
前記受信手段により受信された前記GPS信号に基づいて、現在位置を検出する現在位置検出手段と、
目的地までの経路を探索する経路探索手段と、
前記現在位置検出手段により検出される前記現在位置を含む地図情報を表示部に表示して、前記経路探索手段により探索された前記経路に関する経路案内を行う経路案内手段と、
を備え、
前記経路案内手段は、前記受信手段により所定数以上の前記GPS信号が受信できない間、所定数以上の前記GPS信号が受信できなくなった位置を含む地図情報を、時間の経過とともに次第に広域表示に変更して、前記表示部に表示させることを特徴とするナビゲーション装置。 Map information acquisition means for acquiring map information;
Receiving means for receiving GPS signals;
A current position detecting means for detecting a current position based on the GPS signal received by the receiving means;
A route search means for searching for a route to the destination;
Route guidance means for displaying the map information including the current position detected by the current position detection means on a display unit and performing route guidance regarding the route searched by the route search means;
With
The route guidance means gradually changes the map information including the position where the predetermined number or more of the GPS signals cannot be received to the wide area display as time passes while the reception means cannot receive the predetermined number or more of the GPS signals. Then, the navigation device is characterized in that it is displayed on the display unit.
前記経路案内手段は、前記受信手段により所定数以上の前記GPS信号が受信できない間、所定数以上の前記GPS信号が受信できなくなった位置を含む地図情報を、前記算出手段により算出された前記仮想位置を含むように、時間の経過とともに次第に広域表示に変更することを特徴とする請求項1に記載のナビゲーション装置。 While the predetermined number or more of the GPS signals cannot be received by the receiving means, the predetermined number or more of the GPS signals receive the virtual position when moving at a predetermined speed along the route searched by the route searching means. With a calculation means for calculating based on the elapsed time from the point when
The route guidance unit is configured to calculate the map information including the position where the predetermined number or more of the GPS signals cannot be received while the reception unit cannot receive the predetermined number or more of the GPS signals. The navigation device according to claim 1, wherein the navigation device gradually changes to a wide area display as time passes so as to include the position.
GPS信号を受信する受信手段と、
前記受信手段により受信された前記GPS信号に基づいて、現在位置を検出する現在位置検出手段と、
目的地までの経路を探索する経路探索手段と、
前記現在位置検出手段により検出される前記現在位置を含む地図情報を表示部に表示して、前記経路探索手段により探索された前記経路に関する経路案内を行う経路案内手段と、
移動速度を検出する速度検出手段と、
前記受信手段により所定数以上の前記GPS信号が受信できない間、前記経路探索手段により探索された経路に沿って、前記速度検出手段により検出される速度で移動した場合の仮想位置を、所定数以上の前記GPS信号が受信できなくなった時点からの経過時間に基づいて算出する算出手段と、
を備え、
前記経路案内手段は、前記受信手段により所定数以上の前記GPS信号が受信できない間、所定数以上の前記GPS信号が受信できなくなった位置を含む地図情報を、前記算出手段により算出された前記仮想位置を含むように、時間の経過とともに次第に広域表示に変更することを特徴とするナビゲーション装置。 Map information acquisition means for acquiring map information;
Receiving means for receiving GPS signals;
A current position detecting means for detecting a current position based on the GPS signal received by the receiving means;
A route search means for searching for a route to the destination;
Route guidance means for displaying the map information including the current position detected by the current position detection means on a display unit and performing route guidance regarding the route searched by the route search means;
Speed detecting means for detecting the moving speed;
While the predetermined number or more of the GPS signals cannot be received by the receiving unit, the virtual position when moving at the speed detected by the speed detecting unit along the route searched by the route searching unit is a predetermined number or more. Calculating means for calculating based on the elapsed time from the time point when the GPS signal cannot be received;
With
The route guidance unit is configured to calculate the map information including the position where the predetermined number or more of the GPS signals cannot be received while the reception unit cannot receive the predetermined number or more of the GPS signals. A navigation device characterized by gradually changing to a wide area display as time passes so as to include a position.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007180949A JP2009019902A (en) | 2007-07-10 | 2007-07-10 | Navigation apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007180949A JP2009019902A (en) | 2007-07-10 | 2007-07-10 | Navigation apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009019902A true JP2009019902A (en) | 2009-01-29 |
Family
ID=40359683
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007180949A Pending JP2009019902A (en) | 2007-07-10 | 2007-07-10 | Navigation apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009019902A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7873471B2 (en) * | 2003-07-16 | 2011-01-18 | Harman Becker Automotive Systems Gmbh | Transmission of special routes to a navigation device |
| JP2013205348A (en) * | 2012-03-29 | 2013-10-07 | Toyota Mapmaster:Kk | Apparatus and method for estimating position of mobile terminal device, computer program for estimating position of mobile terminal device, and recording medium with computer program recorded thereon |
| JP2015082264A (en) * | 2013-10-23 | 2015-04-27 | 株式会社レゾナント・システムズ | Bus navigation system and method of bus navigation |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0349000A (en) * | 1989-07-17 | 1991-03-01 | Nissan Motor Co Ltd | Present location display device for traveling object |
| JPH07286856A (en) * | 1994-04-18 | 1995-10-31 | Zanabui Informatics:Kk | Current location calculating device |
| JP2000161973A (en) * | 1998-11-25 | 2000-06-16 | Equos Research Co Ltd | Apparatus and navigation system for providing navigation information |
| JP2003090732A (en) * | 2001-09-19 | 2003-03-28 | Hcx:Kk | Communication type navigation device, information providing device, and method for providing information to the communication type navigation device |
| JP2004069536A (en) * | 2002-08-07 | 2004-03-04 | Matsushita Electric Ind Co Ltd | Data calibration device and method |
-
2007
- 2007-07-10 JP JP2007180949A patent/JP2009019902A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0349000A (en) * | 1989-07-17 | 1991-03-01 | Nissan Motor Co Ltd | Present location display device for traveling object |
| JPH07286856A (en) * | 1994-04-18 | 1995-10-31 | Zanabui Informatics:Kk | Current location calculating device |
| JP2000161973A (en) * | 1998-11-25 | 2000-06-16 | Equos Research Co Ltd | Apparatus and navigation system for providing navigation information |
| JP2003090732A (en) * | 2001-09-19 | 2003-03-28 | Hcx:Kk | Communication type navigation device, information providing device, and method for providing information to the communication type navigation device |
| JP2004069536A (en) * | 2002-08-07 | 2004-03-04 | Matsushita Electric Ind Co Ltd | Data calibration device and method |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7873471B2 (en) * | 2003-07-16 | 2011-01-18 | Harman Becker Automotive Systems Gmbh | Transmission of special routes to a navigation device |
| JP2013205348A (en) * | 2012-03-29 | 2013-10-07 | Toyota Mapmaster:Kk | Apparatus and method for estimating position of mobile terminal device, computer program for estimating position of mobile terminal device, and recording medium with computer program recorded thereon |
| JP2015082264A (en) * | 2013-10-23 | 2015-04-27 | 株式会社レゾナント・システムズ | Bus navigation system and method of bus navigation |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3341687B1 (en) | Methods and systems for generating routes | |
| US6434482B1 (en) | On-vehicle navigation system for searching facilities along a guide route | |
| JP2020518824A (en) | Method and system for providing information using a navigation device | |
| US20080021638A1 (en) | Navigation system | |
| JP2009058332A (en) | Navigation device | |
| KR20040072143A (en) | navigation system and the operating method | |
| JP2011220902A (en) | Navigation device and guidance route search method | |
| US20080051992A1 (en) | Information system, terminal device, and information center device | |
| JP2011027610A (en) | Navigation device and guide route searching method | |
| EP2317282A2 (en) | Map Display Device and Map Display Method | |
| JP4654968B2 (en) | Navigation device | |
| JP2009019902A (en) | Navigation apparatus | |
| JP4817992B2 (en) | Navigation device and U-turn information providing method | |
| JP2007279005A (en) | Travel guiding device for vehicle, and map storage medium | |
| JP2010145352A (en) | Onboard navigation apparatus | |
| JP2008134093A (en) | Navigation device | |
| JP5091751B2 (en) | Navigation device | |
| JP2011226950A (en) | Current position display device and current position display method | |
| JP5045201B2 (en) | Navigation device | |
| JP2010107391A (en) | Route search device, route search method, route search program, and recording medium | |
| JP5259432B2 (en) | Route search device, route search method, route search program, and recording medium | |
| JP2008286688A (en) | Navigation system | |
| JP2009019903A (en) | Navigation device | |
| JP2006153468A (en) | Navigation apparatus and control method when searching bypass route | |
| TW201221990A (en) | Improvements in or relating to navigation devices |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110816 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110817 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20111213 |