JP2009002301A - Fuel injection control device of diesel engine - Google Patents
Fuel injection control device of diesel engine Download PDFInfo
- Publication number
- JP2009002301A JP2009002301A JP2007166295A JP2007166295A JP2009002301A JP 2009002301 A JP2009002301 A JP 2009002301A JP 2007166295 A JP2007166295 A JP 2007166295A JP 2007166295 A JP2007166295 A JP 2007166295A JP 2009002301 A JP2009002301 A JP 2009002301A
- Authority
- JP
- Japan
- Prior art keywords
- learning
- fuel injection
- value
- diesel engine
- cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000007924 injection Substances 0.000 title claims abstract description 183
- 238000002347 injection Methods 0.000 title claims abstract description 183
- 239000000446 fuel Substances 0.000 title claims abstract description 179
- 230000013016 learning Effects 0.000 claims abstract description 388
- 238000001514 detection method Methods 0.000 claims description 16
- 238000009499 grossing Methods 0.000 claims description 3
- 230000006866 deterioration Effects 0.000 abstract description 4
- 239000000243 solution Substances 0.000 abstract 1
- 238000000034 method Methods 0.000 description 81
- 238000002485 combustion reaction Methods 0.000 description 6
- 150000002500 ions Chemical class 0.000 description 5
- 239000000203 mixture Substances 0.000 description 5
- 230000002542 deteriorative effect Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 239000002828 fuel tank Substances 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 239000000498 cooling water Substances 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 239000004215 Carbon black (E152) Substances 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 229930195733 hydrocarbon Natural products 0.000 description 1
- 150000002430 hydrocarbons Chemical class 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/30—Controlling fuel injection
- F02D41/38—Controlling fuel injection of the high pressure type
- F02D41/40—Controlling fuel injection of the high pressure type with means for controlling injection timing or duration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/2406—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using essentially read only memories
- F02D41/2425—Particular ways of programming the data
- F02D41/2429—Methods of calibrating or learning
- F02D41/2451—Methods of calibrating or learning characterised by what is learned or calibrated
- F02D41/2464—Characteristics of actuators
- F02D41/2467—Characteristics of actuators for injectors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/2406—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using essentially read only memories
- F02D41/2425—Particular ways of programming the data
- F02D41/2429—Methods of calibrating or learning
- F02D41/2477—Methods of calibrating or learning characterised by the method used for learning
- F02D41/248—Methods of calibrating or learning characterised by the method used for learning using a plurality of learned values
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
Description
本発明は、ディーゼル機関への実燃料噴射量と指令噴射量とのずれを学習して燃料噴射量を補正するディーゼル機関の燃料噴射制御装置に関する。 The present invention relates to a fuel injection control device for a diesel engine that learns a difference between an actual fuel injection amount to a diesel engine and a command injection amount and corrects the fuel injection amount.
従来、車両用のディーゼル機関では、燃焼騒音の低減、NOxの抑制等のために、メイン噴射に先立って極少量の燃料噴射を行うパイロット噴射が行われているが、このパイロット噴射では、燃料噴射装置からの実燃料噴射量と指令噴射量とにずれが生じると、その効果を充分に発揮することができない。また、メイン噴射においても、燃料噴射装置からの実燃料噴射量と指令噴射量とにずれが生じると、ディーゼル機関の燃焼騒音、振動大やエミッション悪化が生じる。 Conventionally, in a diesel engine for a vehicle, pilot injection is performed in which a very small amount of fuel is injected prior to main injection in order to reduce combustion noise and to suppress NOx. In this pilot injection, fuel injection is performed. If there is a difference between the actual fuel injection amount from the device and the command injection amount, the effect cannot be fully exhibited. Also in main injection, if there is a difference between the actual fuel injection amount from the fuel injection device and the command injection amount, combustion noise, large vibrations, and emission deterioration of the diesel engine occur.
そこで、ディーゼル機関の燃料噴射制御装置においては、通常、燃料噴射装置からの実燃料噴射量と指令噴射量とのずれを燃料噴射の学習値として算出して、その学習値に基づきディーゼル機関への燃料噴射量を補正する、所謂学習制御を実行するようにされている。 Therefore, in a fuel injection control device for a diesel engine, the difference between the actual fuel injection amount from the fuel injection device and the command injection amount is usually calculated as a fuel injection learning value, and the diesel engine is supplied to the diesel engine based on the learning value. A so-called learning control for correcting the fuel injection amount is performed.
また、この学習制御としては、下記(1)〜(6)のように種々の方式が知られており、ディーゼル機関では、その内の一つが選択的に利用されている。
(1)ディーゼル機関への燃料噴射が停止される減速運転時に、各気筒毎に、燃料噴射装置から微少燃料を単発的に噴射させて、その単発噴射によって生じるディーゼル機関の回転速度及び回転変動を検出し、その検出結果から、ディーゼル機関に発生したトルク、延いては、実燃料噴射量を推定して、実燃料噴射量と指令噴射量とのずれを求め、学習値として設定する、減速式の学習制御(例えば、特許文献1等、参照)。
(2)ディーゼル機関のアイドル運転時に、各気筒毎に、インジェクタからの燃料噴射を複数回に分けて行い、そのとき生じたディーゼル機関の回転速度及び回転変動に基づき、各気筒間で回転変動を平滑化するための第1燃料噴射補正量、及び、全気筒の平均回転速度を目標回転速度(アイドル回転速度)に制御するための第2燃料噴射補正量を求め、これら両燃料噴射補正量を実燃料噴射量と指令噴射量とのずれを表すパラメータとして、学習値を設定する多段式の学習制御(例えば、特許文献2等、参照)。
(3)ディーゼル機関の運転状態が安定しているときに、各気筒毎に、筒内圧センサを用いて燃料噴射後の筒内圧を検出し、その検出した筒内圧とディーゼル機関の運転状態から求めた筒内圧との圧力差を、実燃料噴射量と指令噴射量とのずれを表すパラメータとして求め、この圧力差をなくす方向に学習値を更新する、筒内圧検出方式の学習制御(例えば、特許文献3等、参照)。
(4)ディーゼル機関の運転状態が安定しており、高圧燃料を蓄えるコモンレールへの燃料供給が停止しているときに、各気筒のインジェクタを、気筒内への燃料噴射を生じない範囲で駆動(空打ち)して、コモンレール圧の単位時間当たりの圧力降下量を測定することにより、燃料噴射時に各気筒のインジェクタから燃料排出通路にリークする燃料量を求め、これを実燃料噴射量と指令噴射量とのずれを表すパラメータとして、学習値を設定するコモンレール圧検出方式の学習制御(例えば、特許文献4等、参照)。
(5)ディーゼル機関の所定の運転条件下で、各気筒毎に、燃料の燃料時に気筒内に発生したイオンによってグロープラグに流れるイオン電流を検出することにより、燃料の着火期間を求め、各気筒の着火期間と全気筒の平均着火期間とのずれ、及び、全気筒の平均着火期間と目標着火期間とのずれを、実燃料噴射量と指令噴射量とのずれを表すパラメータとして求め、これら各着火期間のずれがなくなるように学習値を更新するイオン電流検出方式の学習制御(例えば、特許文献5等、参照)。
(6)ディーゼル機関の所定の運転条件下で、炭化水素濃度等の所定の排気ガス組成を測定し、その測定結果の目標値からのずれを、実燃料噴射量と指令噴射量とのずれを表すパラメータとして求め、そのずれがなくなるように学習値を更新する排ガス組成検出方式の学習制御(例えば、特許文献6等、参照)。
(1) During deceleration operation in which fuel injection to the diesel engine is stopped, a minute amount of fuel is injected from each fuel injection device for each cylinder, and the rotational speed and rotation fluctuation of the diesel engine caused by the single injection are detected. Detecting, from the detection result, the torque generated in the diesel engine, that is, the actual fuel injection amount is estimated, the deviation between the actual fuel injection amount and the command injection amount is obtained, and set as a learning value, a deceleration type Learning control (see, for example, Patent Document 1).
(2) During the idling operation of the diesel engine, the fuel injection from the injector is performed for each cylinder in a plurality of times, and the rotational fluctuation between the cylinders is determined based on the rotational speed and rotational fluctuation of the diesel engine generated at that time. A first fuel injection correction amount for smoothing and a second fuel injection correction amount for controlling the average rotation speed of all the cylinders to the target rotation speed (idle rotation speed) are obtained, and these two fuel injection correction amounts are obtained. Multi-stage learning control in which a learning value is set as a parameter representing a deviation between the actual fuel injection amount and the command injection amount (see, for example, Patent Document 2).
(3) When the operation state of the diesel engine is stable, the in-cylinder pressure after fuel injection is detected for each cylinder by using the in-cylinder pressure sensor, and obtained from the detected in-cylinder pressure and the operation state of the diesel engine. In-cylinder pressure detection learning control (for example, patent), which calculates a pressure difference from the in-cylinder pressure as a parameter representing a deviation between the actual fuel injection amount and the command injection amount and updates the learning value in a direction to eliminate the pressure difference.
(4) When the operation state of the diesel engine is stable and the fuel supply to the common rail that stores high-pressure fuel is stopped, the injectors of each cylinder are driven within a range that does not cause fuel injection into the cylinders ( The amount of fuel that leaks from the injector of each cylinder to the fuel discharge passage during fuel injection is determined by measuring the pressure drop per unit time of the common rail pressure. Learning control of a common rail pressure detection method in which a learning value is set as a parameter representing a deviation from the amount (see, for example, Patent Document 4).
(5) Under a predetermined operating condition of the diesel engine, for each cylinder, by detecting an ionic current flowing in the glow plug due to ions generated in the cylinder at the time of fuel fuel, an ignition period of the fuel is obtained. The difference between the average ignition period of all cylinders and the average ignition period of all cylinders, and the difference between the average ignition period of all cylinders and the target ignition period are obtained as parameters representing the deviation between the actual fuel injection amount and the command injection amount. Learning control of an ion current detection method in which a learning value is updated so as to eliminate a shift in the ignition period (see, for example, Patent Document 5).
(6) A predetermined exhaust gas composition such as a hydrocarbon concentration is measured under a predetermined operating condition of the diesel engine, and a deviation of the measurement result from a target value is determined as a deviation between the actual fuel injection amount and the command injection amount. Learning control of an exhaust gas composition detection method that is obtained as a parameter to be expressed and updates the learning value so that the deviation is eliminated (see, for example, Patent Document 6).
しかしながら、従来の燃料噴射制御装置では、上記複数の学習制御の一つで得られる学習値を用いてディーゼル機関の気筒内に噴射供給される燃料噴射量を補正することから、学習制御でノイズ、外乱等により誤学習されると、燃料噴射量を適正に補正することができなくなる。 However, in the conventional fuel injection control device, the learning value obtained by one of the plurality of learning controls is used to correct the fuel injection amount injected and supplied into the cylinder of the diesel engine. If erroneously learned due to a disturbance or the like, the fuel injection amount cannot be corrected appropriately.
そして、この場合、燃焼騒音の低減、NOx抑制、といった学習制御による所期の目的を達成することができなくなり、場合によっては、燃焼騒音や振動が大きくなって、運転者に不快感を与えてしまうことも考えられる。 In this case, the intended purpose of the learning control such as reduction of combustion noise and NOx suppression cannot be achieved, and in some cases, combustion noise and vibration are increased, causing driver discomfort. It can also be considered.
本発明は、こうした問題に鑑みなされたものであり、燃料噴射装置からの実燃料噴射量と指令噴射量とのずれを学習値として算出して燃料噴射量を補正するディーゼル機関の燃料噴射制御装置において、誤学習によりディーゼル機関の運転性能が悪化するのを防止することを目的とする。 The present invention has been made in view of these problems, and calculates the deviation between the actual fuel injection amount from the fuel injection device and the command injection amount as a learning value and corrects the fuel injection amount, thereby correcting the fuel injection amount. The purpose is to prevent the operation performance of the diesel engine from deteriorating due to mislearning.
かかる目的を達成するためになされた請求項1に記載のディーゼル機関の燃料噴射制御装置には、互いに異なる学習条件下で動作して、燃料噴射装置に対する指令噴射量と実燃料噴射量とのずれを表す学習値を算出する、複数の学習手段が備えられており、比較手段が、その複数の学習手段にて算出された学習値を比較し、各学習値の差が許容範囲内にあるときに、その複数の学習値の少なくとも一つを用いて、燃料噴射量に対する補正値を設定する。
The fuel injection control device for a diesel engine according to
このように、本発明の燃料噴射制御装置においては、複数の学習手段にて得られた学習値を相互監視し、各学習値が略一致している場合に、その学習値を用いて燃料噴射量の補正値を設定することから、その補正値の信頼性を高めることができ、学習手段の誤学習によってディーゼル機関の運転性能(騒音、振動、排気等)が悪化するのを防止できる。 Thus, in the fuel injection control device of the present invention, the learning values obtained by the plurality of learning means are mutually monitored, and when the learning values substantially match, the fuel injection is performed using the learning values. Since the correction value of the quantity is set, the reliability of the correction value can be improved, and the operation performance (noise, vibration, exhaust, etc.) of the diesel engine can be prevented from deteriorating due to erroneous learning of the learning means.
ここで、比較手段は、各学習手段で得られた学習値の差が許容範囲内にないときには、全ての学習値を破棄して、補正値の設定(更新)を禁止するようにしてもよいが、このようにすると、各学習手段で得られた学習値に基づき補正値が更新される確率が低くなり、学習制御による効果を充分発揮できなくなることも考えられる。 Here, when the difference between the learning values obtained by the learning means is not within the allowable range, the comparison means may discard all the learning values and prohibit the setting (updating) of the correction value. However, if it does in this way, the probability that a correction value will be updated based on the learning value obtained by each learning means will become low, and it will also be considered that the effect by learning control cannot fully be exhibited.
そこで、比較手段は、請求項2に記載のように、各学習手段で得られた学習値の差が許容範囲内にないときには、変動幅の大きい学習値を破棄し、残りの学習値を用いて補正値を設定するように構成するとよい。
Therefore, as described in
つまり、各学習手段で得られる学習値は、通常、大きく変動することはなく、燃料噴射装置の特性変化等によって徐々に変化する。このため、比較手段を請求項2に記載のように構成すれば、各学習手段で得られた学習値の差が許容範囲内にないときには、複数の学習値の中から、変動幅が小さく信頼性が高い学習値を選択して、補正値を設定することができる。
That is, the learning value obtained by each learning means usually does not fluctuate greatly and changes gradually due to changes in the characteristics of the fuel injection device. Therefore, if the comparison means is configured as described in
よって、請求項2に記載の燃料噴射制御装置によれば、燃料噴射量に対する補正値の信頼性を高めることができるだけでなく、各学習手段で比較対象となる学習値が算出される度に補正値を設定できることになり、補正値の更新頻度が低下するのを防止できる。 Therefore, according to the fuel injection control device of the second aspect, not only can the reliability of the correction value for the fuel injection amount be improved, but also the correction is made each time the learning value to be compared is calculated by each learning means. Since the value can be set, it is possible to prevent the update frequency of the correction value from decreasing.
ところで、上記複数の学習手段は、従来より知られている各種学習方式のうちの何れの学習方式で学習値を算出するようにしてもよい。
そして、各学習手段が、上述した排ガス組成検出方式(6)の学習制御のように、ディーゼル機関の気筒毎に学習値を算出することができない場合に、請求項2に記載の発明を適用して、比較手段にて変動幅の大きい学習値を破棄するようにするには、各学習値の変動幅として、学習手段で得られた学習値の最新値と前回値との偏差を求めるようにすればよい。
By the way, the plurality of learning means may calculate the learning value by any learning method among various learning methods conventionally known.
Then, when each learning means cannot calculate the learning value for each cylinder of the diesel engine as in the above-described learning control of the exhaust gas composition detection method (6), the invention according to
また、各学習手段が、ディーゼル機関の気筒毎に学習値を算出するよう構成されている場合には、比較手段において、ディーゼル機関の気筒毎に、各学習手段にて算出された学習値を比較して、補正値を設定するようにすればよいが、この場合、請求項2に記載の発明を適用して、比較手段にて気筒毎に変動幅の大きい学習値を破棄するようにするには、比較手段を、請求項3又は請求項4に記載のように構成するとよい。
In addition, when each learning means is configured to calculate a learning value for each cylinder of the diesel engine, the comparison means compares the learning value calculated by each learning means for each cylinder of the diesel engine. Then, the correction value may be set, but in this case, the invention according to
すなわち、請求項3に記載の燃料噴射制御装置において、比較手段は、ディーゼル機関の気筒毎に各学習手段にて算出された学習値を比較し、各学習手段で得られた学習値の差が許容範囲内にない気筒があるときには、その気筒に対する複数の学習値のうち、全気筒の学習値の平均値との差が大きい学習値を、変動幅の大きい学習値として選択し、その学習値を破棄する。
That is, in the fuel injection control device according to
また、請求項4に記載の燃料噴射制御装置において、比較手段は、請求項3と同様、ディーゼル機関の気筒毎に各学習手段にて算出された学習値を比較するが、各学習手段で得られた学習値の差が許容範囲内にない気筒があるときには、その気筒に対する複数の学習値のうち、変化傾向が他気筒の学習値の変化傾向と大きく異なる学習値を、変動幅の大きい学習値として選択し、その学習値を破棄する。
Further, in the fuel injection control device according to
従って、請求項3又は請求項4に記載の燃料噴射制御装置によれば、ディーゼル機関の気筒毎に、実燃料噴射量と指令噴射量とのずれを補正するための補正値を設定できるだけでなく、何れかの学習手段で特定気筒の学習値に異常が生じたときには、その特定気筒で異常が生じた学習値を、他の気筒の学習値を利用して、より正確に特定することができるようになる。 Therefore, according to the fuel injection control device of the third or fourth aspect, not only the correction value for correcting the deviation between the actual fuel injection amount and the command injection amount can be set for each cylinder of the diesel engine. When any of the learning means has an abnormality in the learning value of the specific cylinder, the learning value in which the abnormality has occurred in the specific cylinder can be more accurately specified using the learning value of the other cylinder. It becomes like this.
なお、請求項3又は請求項4に記載の燃料噴射制御装置のように、各学習手段にて、ディーゼル機関の気筒毎に学習値を算出するようにするには、各学習手段を、上述した学習制御(1)〜(5)の何れかを実行するように構成すればよい。
In order to calculate the learning value for each cylinder of the diesel engine by each learning means as in the fuel injection control device according to
そして、これらの学習制御(1)〜(5)のうち、特に、減速式の学習制御(1)と多段式の学習制御(2)とは、ディーゼル機関に通常設けられている回転速度センサを用いて、実燃料噴射量と指令噴射量とのずれを求めることができるので、請求項3又は請求項4に記載の燃料噴射制御装置においては、請求項5に記載のように、複数の学習手段として、減速式の学習制御を実行する第1学習手段と、多段式の学習制御を実行する第2学習手段とを設けるとよい。
Of these learning controls (1) to (5), in particular, the deceleration learning control (1) and the multistage learning control (2) are rotational speed sensors normally provided in a diesel engine. Accordingly, the difference between the actual fuel injection amount and the command injection amount can be obtained. Therefore, in the fuel injection control device according to
つまり、上述した学習制御(1)〜(5)のうち、筒内圧検出方式の学習制御(3)及びイオン電流検出方式の学習制御(5)では、筒内圧センサやイオン電流センサ等、学習制御専用の特別なセンサを設ける必要がある。また、コモンレール圧検出方式の学習制御(4)は、インジェクタの空打ちによって生じるコモンレール圧の変化に基づき、インジェクタから燃料排出通路にリークする燃料量を学習値として算出するものであるため、インジェクタからリークする燃料以外の要因で実燃料噴射量と指令噴射量とにずれが生じたときには、燃料噴射量を補正することができない。 That is, among the above-described learning controls (1) to (5), in-cylinder pressure detection learning control (3) and ionic current detection learning control (5), learning control such as an in-cylinder pressure sensor and an ion current sensor is used. It is necessary to provide a dedicated special sensor. Further, the learning control (4) of the common rail pressure detection method calculates the amount of fuel leaking from the injector to the fuel discharge passage as a learning value based on a change in the common rail pressure caused by the idling of the injector. When a difference occurs between the actual fuel injection amount and the command injection amount due to factors other than the leaking fuel, the fuel injection amount cannot be corrected.
これに対し、減速式及び多段式の学習制御(1)、(2)であれば、ディーゼル機関に通常設けられている回転速度センサを用いて燃料噴射系全体で生じる実燃料噴射量と指令噴射量とのずれを学習値として求めることができるので、本発明の複数の学習手段として採用すれば、燃料噴射制御装置のコストアップを招くことなく、燃料噴射の制御精度を高めることができる。 On the other hand, in the case of the deceleration type and multistage learning control (1) and (2), the actual fuel injection amount and the command injection generated in the entire fuel injection system using the rotational speed sensor normally provided in the diesel engine. Since the deviation from the quantity can be obtained as a learning value, if it is adopted as a plurality of learning means of the present invention, the control accuracy of the fuel injection can be improved without increasing the cost of the fuel injection control device.
一方、本発明(請求項1〜5)の燃料噴射制御装置において、各学習手段は、互いに異なる学習条件下で動作することから、例えば、複数の学習手段のうちの一つで学習条件が成立するのに時間がかかり、比較手段で各学習値を比較して補正値を設定(更新)するのに要する時間が長くなることも考えられる。 On the other hand, in the fuel injection control apparatus according to the present invention (claims 1 to 5), each learning means operates under different learning conditions, so that, for example, the learning condition is established by one of a plurality of learning means. It takes time to do this, and it is conceivable that the time required for setting (updating) the correction value by comparing each learning value with the comparison means becomes longer.
そこで、本発明(請求項1〜5)の燃料噴射制御装置には、更に請求項6に記載のように、比較動作制限手段を設けるようにしてもよい。
つまり、請求項6に記載の燃料噴射装置において、比較動作制限手段は、複数の学習手段の少なくとも一つから学習値を取得し、その学習値の変動幅が設定範囲内にあれば、その学習値に基づき補正値を設定し、その学習値の変動幅が設定範囲内になければ、比較手段を動作させる。
Therefore, the fuel injection control device of the present invention (
That is, in the fuel injection device according to claim 6, the comparison operation restriction unit acquires the learning value from at least one of the plurality of learning units, and if the variation range of the learning value is within the set range, the learning operation is performed. A correction value is set based on the value, and if the fluctuation range of the learning value is not within the setting range, the comparison unit is operated.
このため、請求項6に記載の燃料噴射制御装置によれば、複数の学習手段の一つで得られた学習値の変動幅が小さく、その学習値の信頼性が高い場合には、その学習値だけで補正値を設定(更新)できることになり、比較手段だけで補正値を設定(更新)するようにした場合に比べて、補正値の更新頻度を高めることができる。 Therefore, according to the fuel injection control device of the sixth aspect, when the fluctuation range of the learning value obtained by one of the plurality of learning means is small and the reliability of the learning value is high, the learning is performed. The correction value can be set (updated) only by the value, and the correction value update frequency can be increased as compared with the case where the correction value is set (updated) only by the comparison means.
以下に、本発明の実施形態を図面に基づき説明する。
(第1実施形態)
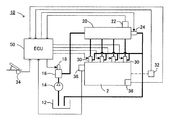
図1は、第1実施形態の蓄圧式の燃料噴射システム10全体の構成を表す概略構成図である。
Embodiments of the present invention will be described below with reference to the drawings.
(First embodiment)
FIG. 1 is a schematic configuration diagram illustrating the overall configuration of a pressure accumulation
本実施形態の燃料噴射システム10は、例えば、自動車用の4気筒のディーゼル機関2に燃料を供給するためのものであり、高圧燃料を蓄えるコモンレール20と、コモンレール20より供給される高圧燃料をディーゼル機関2の各気筒の燃焼室に噴射するインジェクタ30と、本システムを制御する電子制御ユニット(ECU)50とを備える。
The
また、当該燃料噴射システム10には、コモンレール20に燃料を供給するために、燃料タンク12から燃料を汲み上げるフィードポンプ14と、フィードポンプ14から供給された燃料を加圧してコモンレール20に供給する高圧ポンプ16とが備えられている。
Further, in order to supply fuel to the
ここで、高圧ポンプ16は、カムシャフトのカムの回転に伴いプランジャが往復移動することにより加圧室に吸入した燃料を加圧する公知のポンプである。そして、この高圧ポンプ16には、吸入行程でフィードポンプ14から吸入する燃料量を調量するための調量弁18が設けられている。
Here, the high-
また、コモンレール20には、内部の燃料圧力(コモンレール圧)を検出する圧力センサ22、及び、内部の燃料を燃料タンク12側へ溢流させることで内部の燃料圧力を減圧する減圧弁24が設けられている。
The
また、ディーゼル機関2には、その運転状態を検出するセンサとして、回転速度NEを検出する回転速度センサ32、運転者によるアクセル操作量(アクセル開度ACC)を検出するアクセルセンサ34、冷却水の温度(冷却水温THW)を検出する水温センサ36、吸入空気の温度(吸気温TA)を検出する吸気温センサ38、等が設けられている。
Further, the
一方、ECU50は、CPU,ROM,RAM等を中心とするマイクロコンピュータにて構成されている。
そして、ECU50は、コモンレール20に設けられた圧力センサ22や、ディーゼル機関2に設けられた各種センサ32,34,36,38…から検出信号を取り込み、コモンレール圧やインジェクタ30からの燃料噴射量及び燃料噴射時期を制御する。
On the other hand, the
The
つまり、ECU50は、ディーゼル機関2の運転状態に基づきコモンレール20の目標圧力を算出し、圧力センサ22にて検出されたコモンレール圧が目標圧力となるよう調量弁18及び減圧弁24を通電制御するコモンレール圧制御、及び、ディーゼル機関2の運転状態に基づき燃料噴射量及び燃料噴射時期を算出し、その算出結果に応じて各気筒のインジェクタ30を所定タイミングで所定時間開弁することで、各気筒に燃料を噴射供給させる燃料噴射制御を実行する。
That is, the
また、この燃料噴射制御では、ECU50は、メイン噴射に先立ってパイロット噴射を実行させる。そして、インジェクタ30に対する燃料噴射の指令値(指令噴射量)とインジェクタ30から実際に噴射される燃料量(実燃料噴射量)とのずれは燃焼騒音悪化、振動大、エミッション悪化等を発生させてしまうため、これらを防止するため、ECU50は、インジェクタ30からの実燃料噴射量と指令噴射量とのずれを燃料噴射量に対する補正値(学習値)として算出する、学習処理を実行する。
In this fuel injection control, the
以下、この学習処理を、図2に示すフローチャートに沿って説明する。
この学習処理は、ディーゼル機関2の運転時に、ECU50において燃料噴射制御と並列的に実行されるものであり、図2に示すように、処理が開始されると、まず、S110(Sはステップを表す)にて、上述した減速式の学習制御を実行する。
Hereinafter, this learning process will be described with reference to the flowchart shown in FIG.
This learning process is executed in parallel with the fuel injection control in the
つまり、S110では、アクセル開度ACCが零となって、ディーゼル機関2が減速運転に入り、各気筒への燃料噴射量が零となっているときに、学習対象となる気筒i(iは気筒番号を表す)のインジェクタ30から学習用の燃料量(一定量)だけ燃料噴射を単発的に実行させ、その後ディーゼル機関2に生じる回転変動量と回転速度とから、ディーゼル機関2の発生トルクを求め、その発生トルクから実燃料噴射量を推定して、指令噴射量とのずれを算出する、といった手順で、各気筒i毎に、実燃料噴射量と指令噴射量とのずれを表す学習値△Q1iを算出する。
That is, in S110, when the accelerator opening ACC is zero, the
そして、S110の減速式学習制御により、全ての気筒i(i:1〜4)の学習値△Q1iが算出されると、S120に移行して、減速式学習制御で算出された各気筒iの学習値△Q1iの平均値△Q1AVEを算出し、続くS130に移行する。 When the learning value ΔQ1i of all the cylinders i (i: 1 to 4) is calculated by the deceleration type learning control in S110, the process proceeds to S120, and each cylinder i calculated by the deceleration type learning control is transferred. An average value ΔQ1AVE of the learning values ΔQ1i is calculated, and the process proceeds to S130.
S130では、上述した多段式の学習制御を実行する。つまり、S130では、アクセル開度ACCが零となって、ディーゼル機関2がアイドル運転されているときに、各気筒iのインジェクタ30からの燃料噴射を複数回(多段階)に分けて行い、その燃料噴射によって生じるディーゼル機関2の回転速度及び回転変動を各気筒i毎に検出して、各気筒i間で回転変動を平滑化するための第1燃料噴射補正量と、全気筒の平均回転速度を目標回転速度(アイドル回転速度)に制御するための第2燃料噴射補正量とを求め、これら各補正量を加算して移動平均をとることで、各気筒i毎に、実燃料噴射量と指令噴射量とのずれを表す学習値△Q2iを算出する。
In S130, the multistage learning control described above is executed. That is, in S130, when the accelerator opening ACC is zero and the
そして、S130の多段式学習制御により、全ての気筒i(i:1〜4)の学習値△Q2iが算出されると、S140に移行して、多段式学習制御で算出された各気筒iの学習値△Q2iの平均値△Q2AVEを算出し、続くS150に移行する。 Then, when the learning value ΔQ2i of all the cylinders i (i: 1 to 4) is calculated by the multistage learning control of S130, the process proceeds to S140, and each cylinder i calculated by the multistage learning control is transferred. An average value ΔQ2AVE of the learning values ΔQ2i is calculated, and the process proceeds to S150.
なお、S110及びS130にて実行される減速式及び多段式の学習制御の詳細については、上述した特許文献1、2等に記載されており、従来より公知であるため、ここでは、より詳細な説明は省略する。
Note that the details of the deceleration type and multistage learning control executed in S110 and S130 are described in the above-mentioned
次に、S150では、以降の処理で、上記2種類の学習制御で得られた学習値に基づき、ディーゼル機関2の気筒i毎に燃料噴射量の補正値を設定するために、設定対象となる気筒iを特定するためのカウンタiに初期値「1」をセットする。
Next, in S150, in the subsequent processing, the fuel injection amount correction value is set for each cylinder i of the
そして、続くS160では、S110及びS130の学習制御で得られた気筒毎の学習値のうち、気筒iに対する学習値△Q1i、△Q2iを比較し、その偏差(△Q1i−△Q2i)の絶対値が、予め設定された閾値(換言すれば許容範囲)△QTHを越えたか否かを判断する。 In the subsequent S160, learning values ΔQ1i and ΔQ2i for the cylinder i are compared among the learning values for each cylinder obtained by the learning control in S110 and S130, and the absolute value of the deviation (ΔQ1i−ΔQ2i) is compared. Is determined to exceed a preset threshold value (in other words, an allowable range) ΔQTH.
S160にて、学習値△Q1i、△Q2iの偏差の絶対値が閾値△QTHを越えていないと判断されると、S170に移行して、気筒iの燃料噴射量に対する補正値△Qiとして、気筒iの2種類の学習値△Q1i、△Q2iの平均値「(△Q1i+△Q2i)/2」を設定し、S220に移行する。 If it is determined in S160 that the absolute value of the deviation between the learned values ΔQ1i and ΔQ2i does not exceed the threshold value ΔQTH, the process proceeds to S170, and the correction value ΔQi for the fuel injection amount of the cylinder i is set as the cylinder The average value “(ΔQ1i + ΔQ2i) / 2” of the two learning values ΔQ1i and ΔQ2i of i is set, and the process proceeds to S220.
一方、S160にて、学習値△Q1i、△Q2iの偏差の絶対値が閾値△QTHを越えていると判断されると、S180に移行して、減速式の学習制御で得られた気筒iの学習値△Q1iと全気筒平均値△Q1AVEとの差△Q1Ai、及び、多段式の学習制御で得られた気筒iの学習値△Q2iと全気筒平均値△Q2AVEとの差△Q2Aiをそれぞれ算出する。 On the other hand, if it is determined in S160 that the absolute value of the deviation between the learning values ΔQ1i and ΔQ2i exceeds the threshold value ΔQTH, the process proceeds to S180, where the cylinder i obtained by the deceleration type learning control is obtained. The difference ΔQ1Ai between the learning value ΔQ1i and the average value of all cylinders ΔQ1AVE and the difference ΔQ2Ai between the learning value ΔQ2i of the cylinder i obtained by the multistage learning control and the average value of all cylinders ΔQ2AVE are calculated. To do.
そして、続くS190では、S180で算出された各学習制御毎の差△Q1Ai、△Q2Aiを比較し、減速式学習制御での差△Q1Aiが多段式学習制御での差△Q2Aiよりも大きいか否かを判断する。 In the subsequent S190, the differences ΔQ1Ai and ΔQ2Ai for each learning control calculated in S180 are compared, and whether or not the difference ΔQ1Ai in the deceleration learning control is larger than the difference ΔQ2Ai in the multistage learning control. Determine whether.
そして、S190にて、減速式学習制御での差△Q1Aiが多段式学習制御での差△Q2Aiよりも大きいと判断された場合には、減速式学習制御で得られた学習値△Q1iよりも多段式学習制御で得られた学習値△Q2iの方が、信頼性が高いと判断して、S200に移行し、信頼性が高いと判断した学習値△Q2iを、気筒iの燃料噴射量に対する補正値△Qiとして設定し、S220に移行する。 In S190, when it is determined that the difference ΔQ1Ai in the deceleration learning control is larger than the difference ΔQ2Ai in the multistage learning control, it is larger than the learning value ΔQ1i obtained in the deceleration learning control. The learning value ΔQ2i obtained by the multistage learning control is determined to have higher reliability, and the process proceeds to S200, where the learning value ΔQ2i determined to have high reliability is set to the fuel injection amount of the cylinder i. The correction value ΔQi is set, and the process proceeds to S220.
また、S190にて、減速式学習制御での差△Q1Aiが多段式学習制御での差△Q2Ai以下であると判断された場合には、多段式学習制御で得られた学習値△Q2iよりも減速式学習制御で得られた学習値△Q1iの方が、信頼性が高いと判断して、S210に移行し、信頼性が高いと判断した学習値△Q1iを、気筒iの燃料噴射量に対する補正値△Qiとして設定し、S220に移行する。 In S190, when it is determined that the difference ΔQ1Ai in the deceleration learning control is equal to or less than the difference ΔQ2Ai in the multistage learning control, the learning value ΔQ2i obtained by the multistage learning control is larger than the learning value ΔQ2i obtained in the multistage learning control. It is determined that the learning value ΔQ1i obtained by the deceleration learning control is higher in reliability, the process proceeds to S210, and the learning value ΔQ1i determined as higher in reliability is determined with respect to the fuel injection amount of the cylinder i. The correction value ΔQi is set, and the process proceeds to S220.
次に、S220では、カウンタiの値がディーゼル機関2の気筒数n(本実施形態ではn=4)以上であるか否か、つまり、S160〜S210の処理をディーゼル機関2の全ての気筒iに対して行ったか否か、を判断する。
Next, in S220, whether or not the value of the counter i is equal to or greater than the number n of cylinders of the diesel engine 2 (n = 4 in the present embodiment), that is, the processing of S160 to S210 is performed for all the cylinders i of the
そして、カウンタiの値がディーゼル機関2の気筒数n以上で、S160〜S210の処理をディーゼル機関2の全ての気筒に対して行っていれば、当該学習処理を一旦終了し、逆に、カウンタiの値がディーゼル機関2の気筒数nよりも小さく、S160〜S210の処理を行っていない気筒が残っていれば、S230にて、カウンタiをカウントアップ(+1)した後、S160に移行し、次の気筒iに対して、上記と同様の手順で燃料噴射量の補正値△Qiを設定する。
If the value of the counter i is equal to or greater than the number of cylinders n of the
以上説明したように、本実施形態の燃料噴射システム10においては、燃料噴射制御装置としてのECU50が、ディーゼル機関2の各気筒のインジェクタ30からの実燃料噴射量と指令噴射量とのずれを検出して燃料噴射量を補正するための学習処理を実行する。
As described above, in the
そして、この学習処理では、ディーゼル機関2の減速時に気筒毎に学習値△Q1iを算出する減速式の学習制御と、ディーゼル機関2のアイドル運転時に気筒毎に学習値△Q2iを算出する多段式の学習制御との2種類の学習制御を順に実行し、各学習制御で得られた学習値△Q1i、△Q2iが略一致しているとき(|△Q1i−△Q2i|≦△QTH)には、2種類の学習値△Q1i、△Q2iの平均値を、気筒iの燃料噴射量に対する補正値△Qiとして設定する。
In this learning process, a deceleration type learning control that calculates a learning value ΔQ1i for each cylinder when the
また、各学習制御で得られた学習値△Q1i、△Q2iの偏差が大きいとき(|△Q1i−△Q2i|>△QTH)には、2種類の学習値△Q1i、△Q2iのうち、全気筒平均値△Q1AVE、△Q2AVEとの偏差△Q1Ai、△Q2Aiが大きい方を破棄し、残りの(換言すれば偏差△Q1Ai、△Q2Aiが小さい方の)学習値△Q1i又は△Q2iを、気筒iの燃料噴射量に対する補正値△Qiとして設定する。 Further, when the deviation between the learning values ΔQ1i and ΔQ2i obtained by each learning control is large (| ΔQ1i−ΔQ2i |> ΔQTH), all of the two learning values ΔQ1i and ΔQ2i Discard the larger deviations ΔQ1Ai and ΔQ2Ai from the cylinder average values ΔQ1AVE and ΔQ2AVE, and use the remaining learned values ΔQ1i or ΔQ2i (in other words, the smaller deviation ΔQ1Ai or ΔQ2Ai) It is set as a correction value ΔQi for the fuel injection amount of i.
このため、本実施形態によれば、例えば、図3(a)に示すように、減速式学習制御で得られた第1気筒#1の学習値△Q1i(図に示すA)が、他の気筒#2〜#4の学習値△Q1iに比べて、前回値から大きく変化した場合、図3(b)に点線で示すように、多段式学習制御で得られた第1気筒#1の学習値△Q2i(図に示すB)も、減速式学習制御で得られた学習値Bと同様に前回値から大きく変化しており、これら各値A、Bが略一致している場合には、各学習制御で誤学習は発生していないものと判定されて、これら学習値A、Bの平均値が第1気筒#1の燃料噴射量の補正値として設定される。
For this reason, according to the present embodiment, for example, as shown in FIG. 3A, the learning value ΔQ1i (A shown in the figure) of the
これに対し、図3(b)に実線で示すように、多段式学習制御で得られた第1気筒#1の学習値△Q2i(図に示すC)が、他の気筒#2〜#4の学習値△Q2iと同様に前回値から大きく変化しておらず、第1気筒#1の学習値A、Cが大きく異なる場合には、一方の学習制御で誤学習が発生したと判定されて、全気筒平均値△Q2AVEに近い多段式学習制御による学習値Cが、第1気筒#1の燃料噴射量の補正値として設定される。
In contrast, as indicated by a solid line in FIG. 3B, the learning value ΔQ2i (C shown in the figure) of the
従って、本実施形態によれば、各方式の学習制御で得られた学習値△Q1i、△Q2iを気筒毎に比較することにより、一方の学習制御の誤学習が発生したことを正確に判定することができ、しかも、誤学習の発生を判定した際には、2種類の学習値△Q1i、△Q2iの中から正常な学習値を選択して、燃料噴射量に対する補正値を設定することができる。よって、本実施形態によれば、学習値の誤学習によってディーゼル機関2の運転性能(騒音、振動、排気等)が悪化するのを防止することができる。
Therefore, according to the present embodiment, by comparing the learning values ΔQ1i and ΔQ2i obtained by the learning control of each method for each cylinder, it is accurately determined that an erroneous learning of one learning control has occurred. In addition, when the occurrence of erroneous learning is determined, it is possible to select a normal learning value from two types of learning values ΔQ1i and ΔQ2i and set a correction value for the fuel injection amount. it can. Therefore, according to the present embodiment, it is possible to prevent the operation performance (noise, vibration, exhaust, etc.) of the
また、本実施形態では、学習処理で実行する学習制御として、減速式と多段式の2種類の学習制御を採用していることから、各学習制御では、回転速度センサ32からの検出信号を用いてディーゼル機関2の気筒毎に学習値を算出することができ、ディーゼル機関の気筒毎に学習値を算出するために、筒内圧センサやイオン電流センサ等の学習制御用の特別なセンサを別途設ける必要がない。よって、本実施形態によれば、ディーゼル機関2の気筒毎に燃料噴射量に対する補正値を正確に設定し得る燃料噴射制御装置を、低コストで実現できることになる。
In the present embodiment, two types of learning control, a deceleration type and a multistage type, are adopted as the learning control to be executed in the learning process. Therefore, in each learning control, a detection signal from the
なお、本実施形態においては、燃料噴射制御装置としてのECU50にて実行される学習処理のうち、S110の処理が、本発明の第1学習手段に相当し、S130の処理が、本発明の第2学習手段に相当し、S150〜S220の一連の処理が、本発明の比較手段に相当する。
(第2実施形態)
次に、本発明の第2実施形態について説明する。
In the present embodiment, among the learning processes executed by the
(Second Embodiment)
Next, a second embodiment of the present invention will be described.
なお、本実施形態において、第1実施形態と異なる点は、燃料噴射制御装置としてのECU50にて実行される学習処理の一部であり、燃料噴射システム10全体の構成等は、全て第1実施形態と同じであるため、以下の説明では学習処理における第1実施形態との相違点についてのみ説明し、構成等の他の説明は省略する。
In this embodiment, the difference from the first embodiment is a part of the learning process executed by the
図4は、本実施形態のECU50にて実行される学習処理を表すフローチャートである。
図4に示すように、本実施形態の学習処理では、S110の減速式学習制御にて、各気筒の学習値△Q1iを算出すると、S125に移行して、各気筒i毎に、S110で今回算出された学習値△Q1iの前回学習値からの変化量△Q1Diを算出し、S130に移行する。
FIG. 4 is a flowchart showing a learning process executed by the
As shown in FIG. 4, in the learning process of the present embodiment, when the learning value ΔQ1i of each cylinder is calculated in the deceleration type learning control in S110, the process proceeds to S125, and this time in S110 for each cylinder i. The amount of change ΔQ1Di from the previous learning value of the calculated learning value ΔQ1i is calculated, and the process proceeds to S130.
同様に、S130の多段式学習制御にて、各気筒の学習値△Q2iを算出すると、S145に移行して、各気筒i毎に、S130で今回算出された学習値△Q2iの前回学習値からの変化量△Q2Diを算出し、S150に移行する。 Similarly, when the learning value ΔQ2i of each cylinder is calculated in the multistage learning control of S130, the process proceeds to S145, and for each cylinder i, from the previous learning value of the learning value ΔQ2i calculated this time in S130. Change amount ΔQ2Di is calculated, and the process proceeds to S150.
一方、S160にて、学習値△Q1i、△Q2iの偏差の絶対値が閾値△QTHを越えていると判断された場合には、S185に移行して、S125、S145にて算出した気筒iの学習値変化量△Q1Di、△Q2Diと、当該気筒iを除く他の気筒の学習値変化量の平均値△Q1AD、△Q2ADとの差△Q1Ei、△Q2Ei(△Q1Ei=|△Q1ADi−△Q1Di|、△Q2Ei=|△Q2ADi−△Q2Di|)をそれぞれ算出し、S195に移行する。 On the other hand, if it is determined in S160 that the absolute value of the deviation between the learned values ΔQ1i and ΔQ2i exceeds the threshold value ΔQTH, the process proceeds to S185, and the cylinder i calculated in S125 and S145 is calculated. Differences ΔQ1Ei, ΔQ2Ei (ΔQ1Ei = | ΔQ1ADi−ΔQ1Di) between the learning value variation ΔQ1Di, ΔQ2Di and the average value ΔQ1AD, ΔQ2AD of the learning value variation of the other cylinders excluding the cylinder i |, ΔQ2Ei = | ΔQ2ADi−ΔQ2Di |) are calculated, and the process proceeds to S195.
そして、S195では、S185で算出された学習値変化量と他気筒の平均値との差△Q1Ei、△Q2Eiを比較し、減速式学習制御での差△Q1Eiが多段式学習制御での差△Q2Eiよりも大きいか否かを判断し、減速式学習制御での差△Q1Eiが多段式学習制御での差△Q2Eiよりも大きいと判断された場合には、S200に移行し、減速式学習制御での差△Q1Eiが多段式学習制御での差△Q2Eiよりも大きくないと判断された場合には、S210に移行する。 In S195, the differences ΔQ1Ei and ΔQ2Ei between the learning value variation calculated in S185 and the average value of the other cylinders are compared, and the difference ΔQ1Ei in the deceleration learning control is the difference Δ in the multistage learning control. When it is determined whether or not the difference ΔQ1Ei in the deceleration learning control is larger than the difference ΔQ2Ei in the multistage learning control, the process proceeds to S200, and the deceleration learning control is performed. If it is determined that the difference ΔQ1Ei at is not larger than the difference ΔQ2Ei in the multistage learning control, the process proceeds to S210.
このように、本実施形態では、減速式及び多段式の各学習制御で得られた学習値△Q1i、△Q2iの偏差が大きいとき(|△Q1i−△Q2i|>△QTH)には、各学習値△Q1i、△Q2i毎に、その学習値の前回学習値からの変化量△Q1Di、△Q2Diと、他の気筒の学習値変化量の平均値△Q1AD、△Q2ADとの差△Q1Ei、△Q2Eiを、各学習値△Q1i、△Q2iの他の気筒との変化傾向の違いを表すパラメータとして算出し、その差△Q1Ei、△Q2Eiが小さい方の学習値△Q1i又は△Q2iを、気筒iの燃料噴射量に対する補正値△Qiとして設定する。 As described above, in this embodiment, when the deviation between the learning values ΔQ1i and ΔQ2i obtained by the deceleration type and multistage learning control is large (| ΔQ1i−ΔQ2i |> ΔQTH), For each learning value ΔQ1i, ΔQ2i, the difference ΔQ1Ei, ΔQ1Di, ΔQ2Di between the learning values ΔQ1Di, ΔQ2Di from the previous learning value and the average values ΔQ1AD, ΔQ2AD of the other cylinders ΔQ2Ei is calculated as a parameter representing the difference in change tendency of each learning value ΔQ1i, ΔQ2i from the other cylinders, and the learning value ΔQ1i or ΔQ2i of which the difference ΔQ1Ei, ΔQ2Ei is smaller is It is set as a correction value ΔQi for the fuel injection amount of i.
このため、本実施形態においても、第1実施形態と同様、各方式の学習制御で得られた学習値△Q1i、△Q2iを気筒毎に比較することにより、一方の学習制御の誤学習が発生したことを正確に判定することができるだけでなく、誤学習の発生を判定した際には、2種類の学習値△Q1i、△Q2iの中から正常な学習値を選択して、燃料噴射量に対する補正値を設定することができ、学習値の誤学習によってディーゼル機関2の運転性能(騒音、振動、排気等)が悪化するのを防止することができる。
(第3実施形態)
次に、本発明の第3実施形態について説明する。
For this reason, in this embodiment as well, as in the first embodiment, the learning values ΔQ1i and ΔQ2i obtained by the learning control of each method are compared for each cylinder, thereby causing erroneous learning of one learning control. When the occurrence of mislearning is determined, a normal learning value is selected from two types of learning values ΔQ1i and ΔQ2i, and the fuel injection amount is determined. A correction value can be set, and it is possible to prevent the operation performance (noise, vibration, exhaust, etc.) of the
(Third embodiment)
Next, a third embodiment of the present invention will be described.
なお、本実施形態において、上記各実施形態と異なる点は、燃料噴射制御装置としてのECU50にて実行される学習処理であり、燃料噴射システム10全体の構成等は、全て上記各実施形態と同じであるため、以下の説明では学習処理だけについて説明する。
In this embodiment, the difference from each of the above embodiments is a learning process executed by the
図5は、本実施形態のECU50にて実行される学習処理を表すフローチャートである。
図5に示すように、本実施形態の学習処理が開始されると、まずS310にて、以降の処理で使用する全気筒共通のフラグXQDA、及び気筒i毎のフラグXCYLiをリセット(OFF)状態に初期化し、続くS320にて、上述したS110と同様の手順で、減速式の学習制御を実行する。
FIG. 5 is a flowchart showing a learning process executed by the
As shown in FIG. 5, when the learning process of the present embodiment is started, first, in S310, the flag XQDA common to all cylinders used in the subsequent processes and the flag XCYLi for each cylinder i are reset (OFF). In the subsequent S320, deceleration type learning control is executed in the same procedure as in S110 described above.
そして、続くS330では、S320の学習制御で得られた各気筒iの学習値△Q1iとその学習値△Q1iの全気筒平均値△Q1AVEとの差△Q1Aiを各気筒i毎に算出し、続くS340にて、カウンタiに初期値「1」をセットした後、S350に移行する。 In the subsequent S330, a difference ΔQ1Ai between the learning value ΔQ1i of each cylinder i obtained by the learning control in S320 and the average value ΔQ1AVE of all the cylinders of the learning value ΔQ1i is calculated for each cylinder i. In S340, the initial value “1” is set in the counter i, and then the process proceeds to S350.
S350では、S330で気筒iに対して算出された差△Q1Aiと予め設定された第1閾値△QTH1とを比較し、差△Q1Aiが第1閾値△QTH1を越えたか否かを判断する。そして、差△Q1Aiが第1閾値△QTH1を越えていなければ、S370にて、気筒iの燃料噴射量に対する補正値△Qiとして、S320にて算出された気筒iの学習値△Q1iを設定した後、S380に移行し、逆に、差△Q1Aiが第1閾値△QTH1を越えていれば、S360にて、フラグXQDA及び気筒iに対するフラグXCYLiをセット(ON)した後、S380に移行する。 In S350, the difference ΔQ1Ai calculated for the cylinder i in S330 is compared with a preset first threshold value ΔQTH1, and it is determined whether or not the difference ΔQ1Ai exceeds the first threshold value ΔQTH1. If the difference ΔQ1Ai does not exceed the first threshold value ΔQTH1, the learning value ΔQ1i of the cylinder i calculated in S320 is set as a correction value ΔQi for the fuel injection amount of the cylinder i in S370. Thereafter, the process proceeds to S380. Conversely, if the difference ΔQ1Ai exceeds the first threshold value ΔQTH1, the flag XQDA and the flag XCYLi for the cylinder i are set (ON) in S360, and then the process proceeds to S380.
次に、S380では、カウンタiの値がディーゼル機関2の気筒数n(本実施形態ではn=4)以上であるか否か、つまり、S350〜S370の処理をディーゼル機関2の全ての気筒iに対して行ったか否か、を判断する。
Next, in S380, whether or not the value of the counter i is equal to or greater than the number of cylinders n of the diesel engine 2 (n = 4 in the present embodiment), that is, the processing of S350 to S370 is performed for all the cylinders i of the
そして、カウンタiの値がディーゼル機関2の気筒数n以上で、S350〜S370の処理をディーゼル機関2の全ての気筒に対して行っていれば、S400に移行し、逆に、カウンタiの値がディーゼル機関2の気筒数nよりも小さく、S350〜S370の処理を行っていない気筒が残っていれば、S390にて、カウンタiをカウントアップ(+1)した後、S350に移行し、次の気筒iに対し上記と同様の処理を実行する。
If the value of the counter i is equal to or greater than the number of cylinders n of the
次に、S400では、フラグXQDAがセット(ON)されているか否か、つまり、上記S350にて、何れかの気筒iの学習値△Q1iと全気筒平均値△Q1AVEとの差△Q1Aiが第1閾値△QTH1を越えたと判断されたか否かを判断する。 Next, in S400, whether or not the flag XQDA is set (ON), that is, in S350, the difference ΔQ1Ai between the learning value ΔQ1i of any cylinder i and the average value ΔQ1AVE of all cylinders is the first. It is determined whether or not it is determined that the threshold value ΔQTH1 has been exceeded.
そして、フラグXQDAがリセット(OFF)状態であり、S350〜S380の処理によって、全ての気筒iに対して補正値が設定されている場合には、当該処理を一旦終了し、逆に、フラグXQDAがリセット(OFF)状態である場合、つまり、少なくとも一つの気筒iについては、S350にて、学習値△Q1iと全気筒平均値△Q1AVEとの差△Q1Aiが第1閾値△QTH1を越えたと判断されて、燃料噴射量に対する補正値が未設定である場合には、S410に移行する。 If the flag XQDA is in a reset (OFF) state and correction values have been set for all the cylinders i by the processing of S350 to S380, the processing is temporarily terminated, and conversely, the flag XQDA Is in the reset (OFF) state, that is, for at least one cylinder i, it is determined in S350 that the difference ΔQ1Ai between the learning value ΔQ1i and the average value of all cylinders ΔQ1AVE exceeds the first threshold value ΔQTH1. If the correction value for the fuel injection amount is not set, the process proceeds to S410.
S410では、上述したS130と同様の手順で、多段式の学習制御を実行し、続くS420にて、この多段式の学習制御で得られた各気筒iの学習値△Q2iとその学習値△Q2iの全気筒平均値△Q2AVEとの差△Q2Aiを各気筒i毎に算出する。そして、続くS430では、カウンタiに初期値「1」をセットし、S440に移行する。 In S410, multistage learning control is executed in the same procedure as in S130 described above, and in S420, the learning value ΔQ2i of each cylinder i obtained by this multistage learning control and its learning value ΔQ2i. A difference ΔQ2Ai from the average value of all cylinders ΔQ2AVE is calculated for each cylinder i. In the subsequent S430, the initial value “1” is set in the counter i, and the process proceeds to S440.
S440では、カウンタiに対応した気筒iに対するフラグXCYLiがセット(ON)されているか否か、つまり、気筒iに対する燃料噴射量の補正値は未設定状態であるか否か、を判断する。そして、フラグXCYLiがセット(ON)されていなければ、S500に移行し、逆に、フラグXCYLiがセット(ON)されていれば、S450に移行する。 In S440, it is determined whether or not the flag XCYLi for the cylinder i corresponding to the counter i is set (ON), that is, whether or not the correction value of the fuel injection amount for the cylinder i is not set. If the flag XCYLi is not set (ON), the process proceeds to S500. If the flag XCYLi is set (ON), the process proceeds to S450.
S450では、上述したS160と同様に、S320及びS420の学習制御で得られた気筒毎の学習値のうち、気筒iに対する学習値△Q1i、△Q2iを比較し、その偏差(△Q1i−△Q2i)の絶対値が、予め設定された第2閾値△QTH2を越えたか否かを判断する。 In S450, the learning values ΔQ1i and ΔQ2i for the cylinder i among the learning values for each cylinder obtained by the learning control in S320 and S420 are compared as in S160 described above, and the deviation (ΔQ1i−ΔQ2i) is compared. ) Exceeds the preset second threshold value ΔQTH2.
そして、S450にて、学習値△Q1i、△Q2iの偏差の絶対値が第2閾値△QTH2を越えていないと判断されると、S460に移行して、気筒iの燃料噴射量に対する補正値△Qiとして、気筒iの2種類の学習値△Q1i、△Q2iの平均値「(△Q1i+△Q2i)/2」を設定し、S500に移行する。 If it is determined in S450 that the absolute value of the deviation between the learned values ΔQ1i and ΔQ2i does not exceed the second threshold value ΔQTH2, the process proceeds to S460, where the correction value Δ for the fuel injection amount of the cylinder i is Δ. As Qi, an average value “(ΔQ1i + ΔQ2i) / 2” of the two types of learning values ΔQ1i and ΔQ2i of the cylinder i is set, and the process proceeds to S500.
一方、S450にて、学習値△Q1i、△Q2iの偏差の絶対値が第2閾値△QTH2を越えていると判断されると、S470に移行し、上記S190と同様に、S330で算出した気筒iの学習値△Q1iと全気筒平均値△Q1AVEとの差△Q1Ai、及び、S420で算出した気筒iの学習値△Q2iと全気筒平均値△Q2AVEとの差△Q2Aiを比較する。 On the other hand, if it is determined in S450 that the absolute value of the deviation between the learned values ΔQ1i and ΔQ2i exceeds the second threshold value ΔQTH2, the process proceeds to S470, and the cylinder calculated in S330 is the same as in S190. The difference ΔQ1Ai between the learning value ΔQ1i of i and the average value of all cylinders ΔQ1AVE and the difference ΔQ2Ai between the learning value ΔQ2i of the cylinder i calculated in S420 and the average value of all cylinders ΔQ2AVE are compared.
そして、S470にて、差△Q1Aiが差△Q2Aiよりも大きいと判断された場合には、減速式学習制御で得られた学習値△Q1iよりも多段式学習制御で得られた学習値△Q2iの方が、信頼性が高いと判断して、S480に移行し、上述したS200と同様に、学習値△Q2iを気筒iの補正値△Qiとして設定した後、S500に移行する。 In S470, if it is determined that the difference ΔQ1Ai is larger than the difference ΔQ2Ai, the learning value ΔQ2i obtained by the multistage learning control rather than the learning value ΔQ1i obtained by the deceleration learning control. Therefore, the process proceeds to S480, and after the learning value ΔQ2i is set as the correction value ΔQi for the cylinder i as in S200 described above, the process proceeds to S500.
また、S470にて、差△Q1Aiが差△Q2Ai以下であると判断された場合には、多段式学習制御で得られた学習値△Q2iよりも減速式学習制御で得られた学習値△Q1iの方が、信頼性が高いと判断して、S490に移行し、上述のS210と同様に、学習値△Q1iを気筒iの燃料噴射量に対する補正値△Qiとして設定し、S500に移行する。 In S470, when it is determined that the difference ΔQ1Ai is equal to or less than the difference ΔQ2Ai, the learning value ΔQ1i obtained by the deceleration learning control rather than the learning value ΔQ2i obtained by the multistage learning control. Therefore, the process proceeds to S490, and similarly to S210 described above, the learning value ΔQ1i is set as the correction value ΔQi for the fuel injection amount of the cylinder i, and the process proceeds to S500.
そして、S500では、カウンタiの値がディーゼル機関2の気筒数n(本実施形態ではn=4)以上であるか否か、つまり、S440〜S490の処理をディーゼル機関2の全ての気筒iに対して行ったか否かを判断し、カウンタiの値がディーゼル機関2の気筒数n以上で、S440〜S490の処理をディーゼル機関2の全ての気筒に対して行っていれば、当該学習処理を一旦終了し、逆に、カウンタiの値がディーゼル機関2の気筒数nよりも小さく、S440〜S490の処理を行っていない気筒が残っていれば、S510にて、カウンタiをカウントアップ(+1)した後、S440に移行し、次の気筒iに対して、上記と同様の手順で燃料噴射量の補正値△Qiを設定する。
In S500, whether or not the value of the counter i is equal to or greater than the number of cylinders n of the diesel engine 2 (n = 4 in the present embodiment), that is, the processing of S440 to S490 is performed on all the cylinders i of the
このように、本実施形態の学習処理では、減速式の学習制御を実行してから、減速式の学習制御で得られた学習値△Q1iの中に、全気筒平均値△Q1AVEと大きく異なる(△Q1A1>△QTH1となる)学習値が存在するか否かを判定して、全気筒平均値△Q1AVEと大きく異なる学習値が存在しなければ、多段式の学習制御を実行することなく、減速式の学習制御で得られた学習値△Q1iをそのまま各気筒iの補正値△Qiとして設定する。 Thus, in the learning process of the present embodiment, the learning value ΔQ1i obtained by the deceleration type learning control after executing the deceleration type learning control is greatly different from the all cylinder average value ΔQ1AVE ( It is determined whether or not there is a learning value (ΔQ1A1> ΔQTH1), and if there is no learning value greatly different from the all-cylinder average value ΔQ1AVE, deceleration is performed without executing multistage learning control. The learning value ΔQ1i obtained by the learning control of the equation is set as it is as the correction value ΔQi of each cylinder i.
また、減速式の学習制御で得られた学習値△Q1iの中に、全気筒平均値△Q1AVEと大きく異なる学習値が存在する場合には、多段式の学習制御を実行して、その気筒iの補正値△Qiを、第1実施形態と同様に、各学習制御で得られた学習値△Q1i、△Q2iを比較することにより設定する。 If there is a learning value greatly different from the average value ΔQ1AVE for all cylinders in the learning value ΔQ1i obtained by the deceleration type learning control, the multistage learning control is executed, and the cylinder i As in the first embodiment, the correction value ΔQi is set by comparing the learning values ΔQ1i and ΔQ2i obtained by each learning control.
このため、本実施形態の燃料噴射システム10によれば、第1実施形態と同様の効果が得られる他、減速式の学習制御で得られた学習値△Q1iの中に全気筒平均値△Q1AVEと大きく異なる学習値が存在しなければ、多段式の学習制御を実行することなく、補正値△Qiを設定できるので、補正値△Qiをより速やかに設定することができるようになり、補正値△Qiの更新頻度を高めることができる。
Therefore, according to the
なお、本実施形態においては、図5に示した学習処理のうち、S320の処理が、本発明の第1学習手段に相当し、S340〜S400の処理が、本発明の比較動作制限手段に相当し、S410の処理が、本発明の第2学習手段に相当し、S430〜S500の一連の処理が、本発明の比較手段に相当する。 In the present embodiment, among the learning processes shown in FIG. 5, the process of S320 corresponds to the first learning means of the present invention, and the processes of S340 to S400 correspond to the comparison operation limiting means of the present invention. The process of S410 corresponds to the second learning unit of the present invention, and the series of processes of S430 to S500 corresponds to the comparison unit of the present invention.
以上、本発明の実施形態について説明したが、本発明は、上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内にて種々の態様をとることができる。
例えば、第3実施形態では、減速式の学習制御を優先的に実行して、この減速式学習制御で得られた学習値△Q1iの中に、全気筒平均値△Q1AVEとの偏差△Q1Aiが第1閾値△QTH1を越える学習値△Q1iが存在する場合に、多段式の学習制御を実行するものとして説明したが、減速式学習制御及び多段式学習制御は、各々の学習条件成立時にそれぞれ実行するようにし、各学習制御実行後に、それぞれ、その学習制御で得られた学習値と全気筒平均値との偏差を比較して、偏差が小さい場合には、その学習制御で得られた学習値を用いて補正値を設定するようにし、その学習制御で得られた学習値の中に全気筒平均値との偏差が大きい学習値が存在するときに限って、その学習値を用いた補正値の更新を禁止し、その後、他の学習制御で得られた学習値と比較することで補正値を更新するようにしてもよい。
As mentioned above, although embodiment of this invention was described, this invention is not limited to the said embodiment, A various aspect can be taken in the range which does not deviate from the summary of this invention.
For example, in the third embodiment, the deceleration type learning control is preferentially executed, and the deviation ΔQ1Ai from the all-cylinder average value ΔQ1AVE is included in the learning value ΔQ1i obtained by the deceleration type learning control. Although it has been described that multistage learning control is executed when there is a learning value ΔQ1i exceeding the first threshold ΔQTH1, deceleration type learning control and multistage learning control are executed when each learning condition is satisfied. After each learning control is executed, the learning value obtained by the learning control is compared with the average value of all cylinders. If the deviation is small, the learning value obtained by the learning control is obtained. The correction value using the learning value is set only when there is a learning value with a large deviation from the average value of all cylinders among the learning values obtained by the learning control. Ban renewal and then other It may be updated correction value by comparing the learning value obtained by the learning control.
また、上記各実施形態では、燃料噴射量の学習制御として、減速式及び多段式の2種類の学習制御を実行するものとして説明したが、上述した筒内圧検出方式、コモンレール圧検出方式、イオン電流検出方式、排ガス組成検出方式、…等、減速式や多段式の学習制御以外の学習制御を組み合わせて実行するようにしてもよい。 In each of the above embodiments, the fuel injection amount learning control has been described as performing two types of learning control, the deceleration type and the multistage type. However, the above-described in-cylinder pressure detection method, common rail pressure detection method, ion current You may make it perform combining learning control other than the deceleration type or multistage type learning control, such as a detection system, an exhaust gas composition detection system,.
また、上記各実施形態では、本発明を、コモンレール20を備えた蓄圧式の燃料噴射システムに適用した場合について説明したが、本発明は、分配型燃料噴射ポンプを備えた燃料噴射システムであっても適用することはできる。
In each of the above embodiments, the case where the present invention is applied to an accumulator fuel injection system including the
2…ディーゼル機関、10…燃料噴射システム、12…燃料タンク、14…フィードポンプ、16…高圧ポンプ、18…調量弁、20…コモンレール、22…圧力センサ、24…減圧弁、30…インジェクタ、32…回転速度センサ、34…アクセルセンサ、36…水温センサ、38…吸気温センサ、50…ECU(電子制御ユニット)。
DESCRIPTION OF
Claims (6)
互いに異なる学習条件下で動作し、燃料噴射後のディーゼル機関の所定の動作状態に基づき、前記燃料噴射装置に対する指令噴射量と実燃料噴射量とのずれを表す学習値を算出する複数の学習手段と、
該複数の学習手段にて算出された学習値を比較し、各学習値の差が許容範囲内にあるとき、該複数の学習値の少なくとも一つを用いて、前記燃料噴射量に対する補正値を設定する比較手段と、
を備えたことを特徴とするディーゼル機関の燃料噴射制御装置。 In a fuel injection control device that calculates a fuel injection amount based on an operation state of a diesel engine, and injects fuel into a cylinder of the diesel engine by driving the fuel injection device according to the calculation result.
A plurality of learning means that operate under different learning conditions and calculate a learning value representing a deviation between the command injection amount and the actual fuel injection amount for the fuel injection device based on a predetermined operation state of the diesel engine after fuel injection When,
The learning values calculated by the plurality of learning means are compared, and when the difference between the learning values is within an allowable range, a correction value for the fuel injection amount is obtained using at least one of the plurality of learning values. A comparison means to set;
A fuel injection control device for a diesel engine, comprising:
前記比較手段は、ディーゼル機関の気筒毎に各学習手段にて算出された学習値を比較し、各学習手段で得られた学習値の差が許容範囲内にない気筒があるときには、当該気筒に対する複数の学習値のうち、全気筒の学習値の平均値との差が大きい学習値を破棄し、残りの学習値を用いて当該気筒の燃料噴射量に対する補正値を設定することを特徴とする請求項2に記載のディーゼル機関の燃料噴射制御装置。 Each of the learning means calculates the learning value for each of a plurality of cylinders of the diesel engine,
The comparison means compares the learning value calculated by each learning means for each cylinder of the diesel engine, and when there is a cylinder in which the difference between the learning values obtained by each learning means is not within an allowable range, Among the plurality of learning values, the learning value having a large difference from the average value of the learning values of all the cylinders is discarded, and a correction value for the fuel injection amount of the cylinder is set using the remaining learning values. The diesel engine fuel injection control device according to claim 2.
前記比較手段は、ディーゼル機関の気筒毎に各学習手段にて算出された学習値を比較し、各学習手段で得られた学習値の差が許容範囲内にない気筒があるときには、当該気筒に対する複数の学習値のうち、変化傾向が他気筒の学習値の変化傾向と大きく異なる学習値を破棄し、残りの学習値を用いて当該気筒の燃料噴射量に対する補正値を設定することを特徴とする請求項2に記載のディーゼル機関の燃料噴射制御装置。 Each of the learning means calculates the learning value for each of a plurality of cylinders of the diesel engine,
The comparison means compares the learning value calculated by each learning means for each cylinder of the diesel engine, and when there is a cylinder in which the difference between the learning values obtained by each learning means is not within an allowable range, Of the plurality of learning values, the learning value whose change tendency is significantly different from the learning tendency of the other cylinders is discarded, and the correction value for the fuel injection amount of the cylinder is set using the remaining learning values. The fuel injection control device for a diesel engine according to claim 2.
ディーゼル機関への燃料噴射量が零となる減速運転時に、ディーゼル機関の気筒毎に、燃料噴射装置から単発的に燃料噴射を実行させて、燃料噴射後に生じるディーゼル機関の回転変動を検出し、該検出結果から実燃料噴射量を算出して指令噴射量とのずれを求め、前記学習値を設定する第1学習手段と、
ディーゼル機関のアイドル運転時に、ディーゼル機関の気筒毎に、燃料噴射装置からの燃料噴射を複数回に分けて行い、そのとき生じたディーゼル機関の回転速度及び回転変動に基づき、各気筒間で回転変動を平滑化するための第1燃料噴射補正量、及び、前記気筒の平均回転速度を目標回転速度に制御するための第2燃料噴射補正量を求め、これら両燃料噴射補正量に基づき前記学習値を設定する第2学習手段と、
を備えたことを特徴とする請求項3又は請求項4に記載のディーゼル機関の燃料噴射制御装置。 As the plurality of learning means,
During deceleration operation in which the fuel injection amount to the diesel engine becomes zero, for each cylinder of the diesel engine, fuel injection is executed from the fuel injection device in a single shot to detect rotational fluctuations of the diesel engine that occur after fuel injection, A first learning means for calculating an actual fuel injection amount from a detection result to obtain a deviation from a command injection amount, and setting the learning value;
During idle operation of the diesel engine, fuel injection from the fuel injection device is performed in multiple times for each cylinder of the diesel engine, and the rotation fluctuation between the cylinders based on the rotation speed and rotation fluctuation of the diesel engine that occurred at that time The first fuel injection correction amount for smoothing the engine and the second fuel injection correction amount for controlling the average rotation speed of the cylinder to the target rotation speed are obtained, and the learning value is calculated based on these two fuel injection correction amounts. A second learning means for setting
The fuel injection control device for a diesel engine according to claim 3 or 4, characterized by comprising:
を設けたことを特徴とする請求項1〜請求項5のいずれかに記載のディーゼル機関の燃料噴射制御装置。 A learning value is acquired from at least one of the plurality of learning means, and if the fluctuation range of the learning value is within a setting range, the correction value is set based on the learning value, and the fluctuation range of the learning value is set. If not within the range, the comparison operation limiting means for operating the comparison means,
The fuel injection control device for a diesel engine according to any one of claims 1 to 5, wherein
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007166295A JP4706670B2 (en) | 2007-06-25 | 2007-06-25 | Fuel injection control device for diesel engine |
| DE102008002620.4A DE102008002620B4 (en) | 2007-06-25 | 2008-06-24 | Fuel injection control device of a diesel engine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007166295A JP4706670B2 (en) | 2007-06-25 | 2007-06-25 | Fuel injection control device for diesel engine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009002301A true JP2009002301A (en) | 2009-01-08 |
| JP4706670B2 JP4706670B2 (en) | 2011-06-22 |
Family
ID=40092665
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007166295A Expired - Fee Related JP4706670B2 (en) | 2007-06-25 | 2007-06-25 | Fuel injection control device for diesel engine |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4706670B2 (en) |
| DE (1) | DE102008002620B4 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101900052A (en) * | 2009-06-01 | 2010-12-01 | 株式会社电装 | The fuel injection control system of internal-combustion engine |
| WO2012086025A1 (en) * | 2010-12-22 | 2012-06-28 | トヨタ自動車株式会社 | Apparatus for controlling internal combustion engine |
| JP2014214653A (en) * | 2013-04-24 | 2014-11-17 | 株式会社デンソー | Fuel injection control device |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01104939A (en) * | 1987-10-14 | 1989-04-21 | Fuji Heavy Ind Ltd | Idle revolution speed learning control |
| JPH05106485A (en) * | 1991-10-18 | 1993-04-27 | Toyota Motor Corp | Fuel oil consumption control device for internal combustion engine |
| JPH09222041A (en) * | 1996-02-19 | 1997-08-26 | Denso Corp | Fuel injection amount control device for multicylinder engine |
| JPH11229930A (en) * | 1998-02-13 | 1999-08-24 | Toyota Motor Corp | Internal combustion engine controller |
| JP2000038946A (en) * | 1998-07-22 | 2000-02-08 | Toyota Motor Corp | Air-fuel ratio control device for internal combustion engine |
| JP2003254139A (en) * | 2002-03-01 | 2003-09-10 | Denso Corp | Injection quantity control device for internal combustion engine |
| JP2005140046A (en) * | 2003-11-07 | 2005-06-02 | Denso Corp | Injection amount controller for diesel engine |
| JP2005163696A (en) * | 2003-12-04 | 2005-06-23 | Denso Corp | Misfire detection device of internal combustion engine |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0821050B2 (en) | 1989-06-05 | 1996-03-04 | 松下電子工業株式会社 | Neurotip |
| JPH038946A (en) | 1989-06-06 | 1991-01-16 | Osami Kato | Structure for assembling framework member and hardware therefor |
| JPH10252542A (en) * | 1997-03-10 | 1998-09-22 | Toyota Motor Corp | Fuel injection amount control device for diesel engine |
| DE19809173A1 (en) * | 1998-03-04 | 1999-09-09 | Bosch Gmbh Robert | Method and device for controlling fuel injection |
| JP2002051208A (en) | 2000-08-03 | 2002-02-15 | Ricoh Co Ltd | Image processor |
| JP2003007885A (en) | 2001-06-26 | 2003-01-10 | Kyocera Corp | Package for storing semiconductor element |
| JP4221574B2 (en) * | 2003-02-20 | 2009-02-12 | 株式会社デンソー | Fuel injection system |
| JP2005004139A (en) | 2003-06-16 | 2005-01-06 | Berutekku Kk | Supporting stand of planarl display device |
| JP4277677B2 (en) * | 2003-06-27 | 2009-06-10 | 株式会社デンソー | Injection quantity control device for diesel engine |
| JP4321342B2 (en) * | 2004-04-22 | 2009-08-26 | 株式会社デンソー | Common rail fuel injection system |
-
2007
- 2007-06-25 JP JP2007166295A patent/JP4706670B2/en not_active Expired - Fee Related
-
2008
- 2008-06-24 DE DE102008002620.4A patent/DE102008002620B4/en not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01104939A (en) * | 1987-10-14 | 1989-04-21 | Fuji Heavy Ind Ltd | Idle revolution speed learning control |
| JPH05106485A (en) * | 1991-10-18 | 1993-04-27 | Toyota Motor Corp | Fuel oil consumption control device for internal combustion engine |
| JPH09222041A (en) * | 1996-02-19 | 1997-08-26 | Denso Corp | Fuel injection amount control device for multicylinder engine |
| JPH11229930A (en) * | 1998-02-13 | 1999-08-24 | Toyota Motor Corp | Internal combustion engine controller |
| JP2000038946A (en) * | 1998-07-22 | 2000-02-08 | Toyota Motor Corp | Air-fuel ratio control device for internal combustion engine |
| JP2003254139A (en) * | 2002-03-01 | 2003-09-10 | Denso Corp | Injection quantity control device for internal combustion engine |
| JP2005140046A (en) * | 2003-11-07 | 2005-06-02 | Denso Corp | Injection amount controller for diesel engine |
| JP2005163696A (en) * | 2003-12-04 | 2005-06-23 | Denso Corp | Misfire detection device of internal combustion engine |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101900052A (en) * | 2009-06-01 | 2010-12-01 | 株式会社电装 | The fuel injection control system of internal-combustion engine |
| JP2010275989A (en) * | 2009-06-01 | 2010-12-09 | Denso Corp | Fuel injection control apparatus for internal combustion engine |
| US8433497B2 (en) | 2009-06-01 | 2013-04-30 | Denso Corporation | Fuel injection control apparatus for internal combustion engines |
| WO2012086025A1 (en) * | 2010-12-22 | 2012-06-28 | トヨタ自動車株式会社 | Apparatus for controlling internal combustion engine |
| JP2014214653A (en) * | 2013-04-24 | 2014-11-17 | 株式会社デンソー | Fuel injection control device |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102008002620A1 (en) | 2009-01-08 |
| DE102008002620B4 (en) | 2018-06-14 |
| JP4706670B2 (en) | 2011-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4424393B2 (en) | Fuel injection control device for internal combustion engine | |
| US7921706B2 (en) | NOx sensor diagnostic device and exhaust gas purifying system using the device | |
| US8011231B2 (en) | Control apparatus for internal combustion engine | |
| JP4407730B2 (en) | Fuel injection control device for internal combustion engine | |
| US20100305836A1 (en) | Fuel injection control apparatus for internal combustion engines | |
| US10113499B2 (en) | Fuel injection control device for internal combustion engine | |
| JP6359122B2 (en) | Method and apparatus for calibrating post-injection of an internal combustion engine | |
| JP2010261334A (en) | Fuel injection control device | |
| JP4623157B2 (en) | Anomaly detection device | |
| JP2012021514A (en) | Fuel injection control device | |
| US20140046573A1 (en) | Control device and control method for internal combustion engine | |
| JP4706670B2 (en) | Fuel injection control device for diesel engine | |
| JP2011231628A (en) | Method for correcting control of fuel injection and fuel injection controlling device | |
| JP2009097347A (en) | Device for controlling internal combustion engine | |
| JP4551425B2 (en) | Fuel injection control device for diesel engine | |
| JP4532532B2 (en) | Fuel injection control device and fuel injection system | |
| JP5256922B2 (en) | Injection quantity control device for internal combustion engine | |
| JP2008297954A (en) | Abnormality detection device and fuel-injection system using the same | |
| CN111502848B (en) | Method for determining a correction value for a fuel metering of a fuel injector | |
| JP6036519B2 (en) | Fuel injection control device | |
| JP2007170246A (en) | Fuel injection control device for multi-cylinder engine | |
| JP5448181B2 (en) | Fuel injection control correction method and fuel injection control device | |
| CN110685812B (en) | Control device and control method for internal combustion engine | |
| JP4854796B2 (en) | Abnormality detection device for internal combustion engine | |
| JP2010270698A (en) | Fuel injection control device for internal combustion engine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100727 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110228 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4706670 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |