JP2008207331A - ロボット制御装置、ロボット制御方法及びロボット制御プログラム - Google Patents
ロボット制御装置、ロボット制御方法及びロボット制御プログラム Download PDFInfo
- Publication number
- JP2008207331A JP2008207331A JP2008076568A JP2008076568A JP2008207331A JP 2008207331 A JP2008207331 A JP 2008207331A JP 2008076568 A JP2008076568 A JP 2008076568A JP 2008076568 A JP2008076568 A JP 2008076568A JP 2008207331 A JP2008207331 A JP 2008207331A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- virtual
- cpc
- component
- gravity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Manipulator (AREA)
Abstract
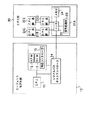
【解決手段】仮想ロボットのエージェントモデル部110は、実ロボットにおけるエージェントモデル部とハードウエア構成及びソフトウエア構成を同じとする。バーチャルCPC(Configurable Physical Component)部120は、実ロボットにおけるCPC部の情報のみで構成され、バーチャルロボット機能部品を結合するソフトウエアからなるバーチャルCPCマネージャ120Bが存在する。ミュレーションにおいては仮想ロボットを構成する1つ以上のバーチャルロボット機能部品にそれぞれ設定された座標系において、重心,質量,回転軸,重心における慣性行列を求める手段と、連結されたバーチャルロボット機能部品間の座標変換を行う手段とを備える。
【選択図】図3
Description
角度θ(t)[p×1]
角度θ'(t)[p×1]
角度θ"(t)[p×1]
が与えられたとき、それらをリンクロボットの一般的な運動方程式
J(θ)θ"+C(θ',θ)+Dθ'+P(θ)+E(θ',θ)=τ
の左辺に直接代入することにより、右辺のトルクを求める問題である。ここで、
J(θ)θ"は p×1 の慣性項、
C(θ',θ)は p×1 の遠心力、コリオリの力に関する項、
Dθ'は p×1 の粘性摩擦係数、
P(θ)は p×1 の重力の項、
E(θ',θ)は p×1 の非線形摩擦の項、
τ(t)は p×1 の入力トルク
である。
J(θ)θ"+C(θ',θ)+Dθ'+P(θ)+E(θ',θ)=τ
をもとに求める問題である。すなわち、順動力学問題は、微分方程式を解く問題であって、上式を
θ"=J(θ)−1[−C(θ',θ)−Dθ'−P(θ)−E(θ',θ)+τ]
と変形した後、適当な初期条件
θ(0)=θ0
θ'(0)=θ0'
のもとで、オイラー法やルンゲタック法などによる数値積分を行うことにより解くことができる。
h(t)i=INV[θ(t),0,ei,0]
の演算を行う。
b(t)=INV[θ(t),θ(t)',0,g]
によってb(t)を計算する。
θ"(t)=H(t)−1[τ(t)−b(t)]
によってθ"(t)を計算する。
θ'(t+Δt)=θ'(t)+θ"(t)Δtθ(t+Δt)=θ(t)+θ'(t)Δt+θ"(t)Δt2/2
を計算する。
t=t+Δt
とする。
Claims (4)
- 仮想ロボットを構成する1つ以上の仮想構成部品にそれぞれ設定された座標系において、重心,質量,回転軸,重心における慣性行列を求める手段と、連結された仮想構成部品間の座標変換を行う手段とを備えるロボットシミュレーション装置。
- 各仮想構成部品に附属して、その座標系において、重心,質量,回転軸,重心における慣性行列を求めるための情報及び連結された仮想構成部品間の座標変換を行うための情報を記憶している請求項1記載のロボットシミュレーション装置。
- 実ロボットを構成する1つ以上の構成部品にそれぞれ設定された座標系において、重心,質量,回転軸,重心における慣性行列を求める手段と、連結された構成部品間の座標変換を行う手段とを備えるロボットシミュレーション装置。
- 各構成部品に記憶されている情報を用いて、慣性行列を求めるとともに構成部品間の座標変換を行い、ロボットの動きをシミュレーションする請求項3記載のロボットシミュレーション装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008076568A JP4569653B2 (ja) | 2008-03-24 | 2008-03-24 | ロボット制御装置、ロボット制御方法及びロボット制御プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008076568A JP4569653B2 (ja) | 2008-03-24 | 2008-03-24 | ロボット制御装置、ロボット制御方法及びロボット制御プログラム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP22689497A Division JP4121587B2 (ja) | 1997-08-22 | 1997-08-22 | ロボットシミュレーション装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008207331A true JP2008207331A (ja) | 2008-09-11 |
| JP4569653B2 JP4569653B2 (ja) | 2010-10-27 |
Family
ID=39784065
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008076568A Expired - Lifetime JP4569653B2 (ja) | 2008-03-24 | 2008-03-24 | ロボット制御装置、ロボット制御方法及びロボット制御プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4569653B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10302519B2 (en) | 2016-07-12 | 2019-05-28 | Fanuc Corporation | Robot center-of-gravity display device, robot control device, and robot simulation device |
| JP2021506604A (ja) * | 2017-12-19 | 2021-02-22 | 北京可以科技有限公司Beijing Keyi Technology Co.,Ltd | モジュラリゼーションロボットの制御方法およびそのシステム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63241613A (ja) * | 1987-03-30 | 1988-10-06 | Hitachi Ltd | モジユ−ル型マニピユレ−タの制御装置 |
| JPH04347703A (ja) * | 1991-05-24 | 1992-12-02 | Sony Corp | 多軸ロボットの制御装置 |
| JPH054181A (ja) * | 1991-06-24 | 1993-01-14 | Toshiba Corp | ロボツト制御装置 |
| JPH05245784A (ja) * | 1991-11-25 | 1993-09-24 | Toshiba Corp | マニピュレータ装置 |
| JPH05298422A (ja) * | 1992-04-16 | 1993-11-12 | Hitachi Ltd | 多関節構造体の動作生成方法 |
| JPH10217174A (ja) * | 1996-07-08 | 1998-08-18 | Sony Corp | ロボツト装置 |
-
2008
- 2008-03-24 JP JP2008076568A patent/JP4569653B2/ja not_active Expired - Lifetime
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63241613A (ja) * | 1987-03-30 | 1988-10-06 | Hitachi Ltd | モジユ−ル型マニピユレ−タの制御装置 |
| JPH04347703A (ja) * | 1991-05-24 | 1992-12-02 | Sony Corp | 多軸ロボットの制御装置 |
| JPH054181A (ja) * | 1991-06-24 | 1993-01-14 | Toshiba Corp | ロボツト制御装置 |
| JPH05245784A (ja) * | 1991-11-25 | 1993-09-24 | Toshiba Corp | マニピュレータ装置 |
| JPH05298422A (ja) * | 1992-04-16 | 1993-11-12 | Hitachi Ltd | 多関節構造体の動作生成方法 |
| JPH10217174A (ja) * | 1996-07-08 | 1998-08-18 | Sony Corp | ロボツト装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10302519B2 (en) | 2016-07-12 | 2019-05-28 | Fanuc Corporation | Robot center-of-gravity display device, robot control device, and robot simulation device |
| JP2021506604A (ja) * | 2017-12-19 | 2021-02-22 | 北京可以科技有限公司Beijing Keyi Technology Co.,Ltd | モジュラリゼーションロボットの制御方法およびそのシステム |
| JP7053067B2 (ja) | 2017-12-19 | 2022-04-12 | 北京可以科技有限公司 | モジュラリゼーションロボットの制御方法およびそのシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4569653B2 (ja) | 2010-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2011074838A2 (ko) | 로봇 동기화 장치 및 그 방법 | |
| WO2017097170A1 (zh) | 自主定位导航设备、定位导航方法及自主定位导航系统 | |
| KR20210114467A (ko) | 자율 주행 시뮬레이션 방법 및 장치, 전자 디바이스 및 저장매체 | |
| US11559898B2 (en) | Teleoperation system, method, apparatus, and computer-readable medium | |
| CN106060058A (zh) | 基于互联网的工业机器人远程控制方法 | |
| CN103926845A (zh) | 空间机器人视觉伺服捕获运动目标的地面模拟系统及模拟方法 | |
| Boren et al. | Exponential growth of ROS [ROS topics] | |
| US10726248B2 (en) | Validating gesture recognition capabilities of automated systems | |
| KR100756345B1 (ko) | 네트워크를 이용한 로봇 시뮬레이션 시스템 | |
| JP4569653B2 (ja) | ロボット制御装置、ロボット制御方法及びロボット制御プログラム | |
| CN115122325A (zh) | 一种具有视场约束的拟人化机械手鲁棒视觉伺服控制方法 | |
| JP4121587B2 (ja) | ロボットシミュレーション装置 | |
| KR101103586B1 (ko) | 로봇용 시뮬레이션 시스템 및 방법 | |
| CN1440856A (zh) | Internet的网上遥操作机器人对弈的控制系统 | |
| CN112613469A (zh) | 目标对象的运动控制方法及相关设备 | |
| CN109213306A (zh) | 一种机器人远程控制平台及其设计方法 | |
| KR100536537B1 (ko) | 로보트의구조기술방법과로보트장치및로보트의구성부품 | |
| US11645778B2 (en) | Apparatus and method for identifying and picking object using artificial intelligence algorithm | |
| CN112783142B (zh) | 车道居中控制的仿真测试系统、方法、设备和存储介质 | |
| KR102175943B1 (ko) | 무인자동차 교육용 플랫폼 및 자동차 플랫폼 | |
| CN113059566A (zh) | 基于柔性机器人的直接力反馈遥操作方法及装置 | |
| JP5200400B2 (ja) | 分散シミュレーション連携装置、該連携装置に用いられる連携制御方法及び連携制御プログラム | |
| Goila et al. | ADAS Feature Concepts Development Framework via a Low Cost RC Car | |
| US20240157974A1 (en) | Simulation device for outputting image data from a virtual environment of a vehicle to a control unit, test setup having such a simulation device, and method for outputting image data from a virtual environment of a vehicle to a control unit | |
| JP6908257B2 (ja) | ロボットおよびロボット制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100708 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100713 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100726 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130820 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130820 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |