JP2007202632A - Medicinal solution administrating apparatus and its method of control - Google Patents
Medicinal solution administrating apparatus and its method of control Download PDFInfo
- Publication number
- JP2007202632A JP2007202632A JP2006022041A JP2006022041A JP2007202632A JP 2007202632 A JP2007202632 A JP 2007202632A JP 2006022041 A JP2006022041 A JP 2006022041A JP 2006022041 A JP2006022041 A JP 2006022041A JP 2007202632 A JP2007202632 A JP 2007202632A
- Authority
- JP
- Japan
- Prior art keywords
- blood
- sensor
- needle
- administration device
- solution administration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 0 C(CC1)CC2=C1C21C*CCC1 Chemical compound C(CC1)CC2=C1C21C*CCC1 0.000 description 5
- XDTMQSROBMDMFD-UHFFFAOYSA-N C1CCCCC1 Chemical compound C1CCCCC1 XDTMQSROBMDMFD-UHFFFAOYSA-N 0.000 description 1
- BPBOWYWUOUJKLO-UHFFFAOYSA-N CC=C1CCCCC1 Chemical compound CC=C1CCCCC1 BPBOWYWUOUJKLO-UHFFFAOYSA-N 0.000 description 1
Images











Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
Abstract
Description
本発明は、薬液投与装置とその制御方法に関するものである。 The present invention relates to a chemical solution administration device and a control method thereof.
糖尿病患者は、定期的に血糖値を測定し、その血糖値に基づいてインスリン(薬液の一例として用いた)を注射し、血糖値を正常に保つ必要がある。従来、血糖値を測定するために穿刺装置を用いて患者の指先等から、少量の血液を採取し、次に測定装置を用いて採取した血液の血糖値を測定し、その後測定された血糖値に応じて注射装置でインスリンを注射するものであった。 A diabetic patient needs to regularly measure a blood glucose level and inject insulin (used as an example of a drug solution) based on the blood glucose level to keep the blood glucose level normal. Conventionally, a small amount of blood is collected from a patient's fingertip, etc., using a puncture device to measure the blood glucose level, and then the blood glucose level of the collected blood is measured using a measuring device, and then the measured blood glucose level Insulin was injected with an injection device in response to this.
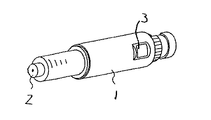
即ち、図11に示すように、先ず穿刺装置1の刺針口2を患者の指先等に当接させる。そして、ボタン3を押す。すると刺針口2から針が高速で突出するとともに瞬時に後退し、指先等に微小な傷をつける。そして、この傷から血液を採取する。 That is, as shown in FIG. 11, the puncture port 2 of the puncture device 1 is first brought into contact with the patient's fingertip or the like. Then, button 3 is pressed. As a result, the needle protrudes from the puncture needle 2 at a high speed and retracts instantaneously, thereby causing a minute scratch on the fingertip or the like. Then, blood is collected from this wound.
次に、図12に示す血糖値を測定する測定装置4を用い、この測定装置4に挿入された血液センサ5に採取した血液を点着する。そうすると、血糖値が表示部6に表示される。この表示部6に表示された血糖値に基づいて、図13示す注射装置7を用い、この注射装置7の設定ボタン8を操作してインスリンの投与量を設定する。
Next, using the
次に、この注射装置7の注射口9を患者の皮膚に当接させて投与ボタン10を押す。すると、注射口9から針が進出してインスリンを患者に投与する。
Next, the injection port 9 of the
なお、この出願の発明に関連する先行技術文献情報としては、例えば、特許文献1、特許文献2が知られている。
しかしながらこのような従来のインスリンの投与操作は、患者に多大の負担をかけるものであった。 However, such conventional insulin administration operations place a great burden on the patient.
この様子をいま少し説明する。先ず、患者は穿刺装置1で皮膚に傷をつける。そして血液を流出させる。次に皮膚から流出した血液を測定装置4に挿入されたセンサ5に点着する。測定装置4での血液の測定を待って、この測定装置4の表示部6に表示された血糖値の値を正確に記憶し、このとき注射装置7の設定ボタン8を用いて投与量の設定に間違いのないよう細心の注意を払わなければならない。次に、この注射装置7を患者の皮膚に再び当接させてインスリンを投与する。
I will explain this situation a bit now. First, the patient scratches the skin with the puncture device 1. And blood is drained. Next, blood flowing out from the skin is spotted on the sensor 5 inserted into the
以上説明したようにインスリンの投与操作は、細心の注意の下に操作しなければならず、患者に多大の負担をかけるものであった。 As described above, the insulin administration operation must be performed with great care, and places a great burden on the patient.
本発明は、この問題を解決したもので、容易に血液の採取から薬液の投与までの操作ができる薬液投与装置を提供することを目的としたものである。 The present invention has been made to solve this problem, and an object of the present invention is to provide a drug solution administration device that can easily perform operations from blood collection to drug solution administration.
この目的を達成するために本発明の薬液投与装置は、一方が開放するとともに他方が封止された筒体と、この筒体の前記開放側に装着された血液センサと、この血液センサに対して前記封止側に設けられた中空の針と、この針が装着されたカートリッジと、このカートリッジに封入された薬液を押し出す押し出し手段と、前記カートリッジと前記押し出し手段とを一体的に往復運動させる往復運動手段と、前記血液センサからの信号に基づいて血液の性質を測定する測定回路部と、この測定回路部と前記往復手段と前記押し出し手段とを制御する制御部と、この制御部に接続された開始ボタンとを同一筺体内に設け、前記開始ボタンの操作により、前記針の往復運動と、血液の測定動作と、前記薬液の押し出し動作とをするものである。これにより、所期の目的を達成することができる。 In order to achieve this object, a drug solution administration device according to the present invention includes a cylindrical body that is open on one side and sealed on the other side, a blood sensor mounted on the open side of the cylindrical body, and a blood sensor. The hollow needle provided on the sealing side, the cartridge to which the needle is attached, the pushing means for pushing out the chemical solution sealed in the cartridge, and the cartridge and the pushing means are reciprocated integrally. A reciprocating means, a measuring circuit section for measuring blood properties based on a signal from the blood sensor, a control section for controlling the measuring circuit section, the reciprocating means and the pushing means, and a connection to the control section The start button is provided in the same housing, and the reciprocating motion of the needle, the blood measurement operation, and the drug solution push-out operation are performed by operating the start button. Thereby, the intended purpose can be achieved.
以上のように本発明によれば、開始ボタンの押下により自動的に血液の採取と、この採取した血液の性質の測定と、この測定結果に基づいた薬液量の設定と、この薬液の投与をすることができる。即ち、患者は開始ボタンを押下するのみであり、その操作は非常に簡単で容易なものとなり、操作にまつわる負担を著しく軽減することができる。 As described above, according to the present invention, blood is automatically collected by pressing the start button, the property of the collected blood is measured, the amount of the drug solution is set based on the measurement result, and the drug solution is administered. can do. That is, the patient only presses the start button, and the operation becomes very simple and easy, and the burden on the operation can be remarkably reduced.
また、血液を採取するための穿刺装置の機能と、前記血液の性質を測定する測定装置の機能と、薬液を投与するための注射装置の機能とを同一筺体内に有しているので容易に携帯することができる。 In addition, since it has the function of a puncture device for collecting blood, the function of a measuring device for measuring the properties of the blood, and the function of an injection device for administering a drug solution in the same housing, it can be easily Can be carried around.
更に、血液の採取と薬液を投与する針、及びこの針を往復運動させる往復運動手段を共用化することができるので、小型化を実現することができる。 Furthermore, since a needle for collecting blood and administering a drug solution and a reciprocating means for reciprocating the needle can be used in common, a reduction in size can be realized.
(実施の形態1)
以下、本発明の実施の形態について、図面に基づいて説明する。図1は、実施の形態1における薬液投与装置11のブロック図である。図1において、12は円筒状の筒体であり、この筒体12の一方12aは開放するとともに他方12bは封止されたものである。この筒体12の一方12aには血液センサ(以下、センサという)13が着脱自在に装着されている。そして、このセンサ13の内側(筒体12の他方12b側)には金属製の中空針(以下、針という)14がカートリッジ15に装着されてセンサ13に対向している。このカートリッジ15内にはインスリン(薬液の一例として用いた)16が封入されている。
(Embodiment 1)
Hereinafter, embodiments of the present invention will be described with reference to the drawings. FIG. 1 is a block diagram of a drug solution administration device 11 according to the first embodiment. In FIG. 1,
カートリッジ15は押し出し手段17に機械的に連結されており、この押し出し手段17は往復運動手段18に機械的に連結されている。この押し出し手段17と往復運動手段18は夫々制御部19に接続されており、この制御部19で制御される。即ち、押し出し手段17はカートリッジ15内のインスリン16を針14から設定量に基づいて押し出すものであり、往復運動手段18は押し出し手段17と一体的に連結して針14をセンサ13側へ往復運動をさせるものである。
The
25(25a〜25eで構成されている)はコネクタであり、測定回路部26を形成する切替回路27に接続されている。この切替回路27の出力は電流/電圧変換器28の入力に接続されており、この電流/電圧変換器28の出力はA/D変換器29の入力に接続されている。このA/D変換器29の出力は演算部30の入力に接続されており、この演算部30の出力は液晶で形成された表示部31に接続されている。また、制御部19には演算部30と、切替回路27とが接続されている。また、32は基準電圧源であり切替回路27に接続されている。ここで、切替回路27から基準電圧源32までが測定回路部26であり、センサ13に採取された血液の性質を測定するものである。
Reference numeral 25 (consisting of 25a to 25e) denotes a connector, which is connected to a
35は、センサ供給手段であり、このセンサ供給手段35内にはセンサ13が積層されて収納されている。このセンサ供給手段35は制御部19に接続されており、制御部19の指令でセンサ13を一枚ずつ順次筒体12の一方12aに供給するものである。
36は、当接スイッチ(当接センサの一例として用いた)であり、制御部に19接続されている。この当接スイッチ36は筒体12の一方12a先端の刺針口に隣接して装着されており、皮膚への当接を検出するものである。本実施の形態では当接スイッチとして、機構的に動作するマイクロスイッチを用いたが、これはマイクロスイッチに限ることはなく、光学的に当接を検知するフォトセンサであっても良いし、皮膚の電気抵抗を測定することにより当接を検知するものであっても良い。
Reference numeral 36 denotes a contact switch (used as an example of a contact sensor), which is connected to the control unit 19. The contact switch 36 is mounted adjacent to the puncture opening at the tip of one
37は負圧手段であり、その入力は制御部19に接続されるとともに出力は負圧路92を介して筒体12内に接続されている。そして、センサ13の近傍を負圧にすることにより皮膚表面を緊張させる。皮膚を緊張させることにより、針14での穿刺を容易にしたり、血液の流出を助長するものである。
38は制御部19に接続されたメモリであり、演算部30での演算結果や、押し出し手段17の押し出し量(すなわち薬液の投与量)、或いは往復運動手段18の運動量やそのスピードの制御値等を格納するものである。このメモリ38は着脱自在に設けられているので、演算部30で測定した血液の性質(測定日時、血糖値、インスリンの投与量等)が格納されており、そのまま医療機関へ提出して適切な指示を得ることができる。
39は、制御部19に接続された警報手段であり、本実施の形態ではブザーで形成している。これは、ブザーに限ることはなく、音声を用いて注意やガイドをしても良く、また、光等を用いても良い。40は、制御部19に接続された開始ボタンであり、一連の操作を開始する指示を与えるものである。 Reference numeral 39 denotes alarm means connected to the control unit 19, which is formed by a buzzer in this embodiment. This is not limited to a buzzer, but may be used for caution and guidance using sound, or light or the like may be used. Reference numeral 40 denotes a start button connected to the control unit 19, which gives an instruction to start a series of operations.
33は制御部19に接続されたタイマであり、測定回路部26での測定時間の管理や、押し出し手段17や往復運動手段18の時間管理をするものである。また、時計機能も有している。
A
次に、図2〜図5を用いてセンサ13の説明を行なう。図2は、本実施の形態におけるセンサ13の断面図である。このセンサ13を形成する基体45は、基板46と、この基板46の上面に貼り合わされたスペーサ47と、このスペーサ47の上面に貼り合わされたカバー48とで構成されている。
Next, the
50は、血液の貯留部であり、その容積は0.904μLである。またこの貯留部50は、基板46に設けられた孔46aとスペーサ47に設けられた孔47aに連通して形成されており、下方に向かって開口している。51はこの貯留部50に一方の端が連結された供給路であり、貯留部50に溜められた血液を毛細管現象で検出部52に導く路である。また、この供給路51の他端は空気孔53に連結している。
54は、検出部(図4参照)52上に載置された試薬であって、この試薬54は、0.01〜2.0wt%CMC水溶液に、PQQ−GDHを0.1〜5.0U/センサ、フェリシアン化カリウムを10〜200mM、マルチトールを1〜50mM、タウリンを20〜200mM添加して溶解させて試薬溶液を調整し、これを基板46に形成された検出電極55,57(図4参照)上に滴下し、乾燥させることで形成したものである。
54 is a reagent placed on the detection unit (see FIG. 4) 52. This
図3は、センサ13の分解平面図である。図3(c)は、センサ13を構成する長方形をした基板46の平面図であり、その一方の寸法46bは10mmであり、他方の寸法46cは7mmである。この基板46の材質はポリエチレンテレフタレート(PET)であり、その厚さは0.188mm(0.075〜0.250mmの範囲)の物を用いている。
FIG. 3 is an exploded plan view of the
そして、この基板46の上面には金、白金、パラジウム等を材料として、スパッタリング法或いは蒸着法により導電層を形成し、これをレーザ加工により検出電極55〜58と、この検出電極55〜58から夫々導出された接続電極55a〜58aを一体的に形成している。46aは、基板46の略中央に設けられた孔であり、その直径は2.000mmとしている。この孔46aの壁面は、供給路51より弱い親水性処理をするか、或いはカバー48の上面48eより弱い撥水性処理をすることが好ましい。
Then, a conductive layer is formed on the upper surface of the
図3(b)はスペーサ47の平面図であり、一方の寸法47bは8mmである。また、他方の寸法47cは4mmである。そしてその形状は長方形状をしている。47aは、スペーサ47の略中央に設けられた直径2.000mm孔であり、基板46に設けられた孔46aに対応する位置に設けられている。この孔47aの壁面は、供給路51より弱い親水性処理をするか、或いはカバー48の上面48eより弱い撥水性処理をすることが好ましい。
FIG. 3B is a plan view of the
また、この孔47aから検出部52方向に向かってスリット47eが形成されている。このスリット47eは血液の供給路51を形成するものである。このスリット47eの壁面と、それに対応する前記基板46の上面も親水性処理を行なう。また、このスリット47eの幅47fは0.600mmとし、その長さ47gは2.400mmとして、0.144μLの容積を有する供給路51を形成している。なお、スペーサ47の材質はポリエチレンテレフタレートであり、その厚さは0.100mm(0.050〜0.125mmの範囲)の物を用いている。
A slit 47e is formed from the
図3(a)はカバー48の平面図である。その形状は、一方の寸法48bは8mmであり、他方の寸法48cは4mmとして長方形状をしている。53は空気孔であり、供給路51の先端部に対応して設けられている。その直径は50μmである。
このカバー48の材質はポリエチレンテレフタレートであり、その厚さは0.075mm(0.050〜0.125mmの範囲)の物を用いている。このカバー48は以下の処理を行なっている。即ち、基体45の上面を形成するカバー48の上面48eは撥水性処理を行なっている。また、供給路51の天面を形成するカバー48の下面側は親水性処理を行なっている。また、貯留部50の天面50aは、供給路51より弱い親水性処理をするか、或いはカバー48の上面48eより弱い撥水性処理をすることが好ましい。本実施の形態では、貯留部50の天面50aは供給路51より弱い親水性処理にするとともに、カバー48の上面48eより弱い撥水性処理を行なっている。
FIG. 3A is a plan view of the
The
ここで、親水性を弱にする方法、及び、撥水性を弱にする方法について述べる。先ず、親水性を弱にするには、材料として用いているポリエチレンテレフタレート(PET)の親水性材料を剥がし、ポリエチレンテレフタレートの有する疎水性を強くする。なお、これは、UV(紫外線)を照射して親水性材料を分解することで実現できる。また、貯留部50の天面50aは、ポリエチレンテレフタレート素材の疎水性をそのまま用いることができる。
Here, a method for weakening hydrophilicity and a method for weakening water repellency will be described. First, in order to weaken the hydrophilicity, the hydrophilic material of polyethylene terephthalate (PET) used as a material is peeled off to increase the hydrophobicity of polyethylene terephthalate. This can be realized by decomposing the hydrophilic material by irradiating UV (ultraviolet rays). Moreover, the top surface 50a of the
次に、撥水性についてのべる。撥水性材料を得るには、材料に撥水性材料を混入すれば良い。また、親水性材料の上に適量の撥水性材料を塗布しても良い。なお撥水性を弱にするには、混入する撥水性材料の量でその撥水度を調整することができる。 Next, we will talk about water repellency. In order to obtain a water-repellent material, the material may be mixed with a water-repellent material. Further, an appropriate amount of water repellent material may be applied on the hydrophilic material. In order to weaken the water repellency, the water repellency can be adjusted by the amount of the water repellant material to be mixed.
このような親水性処理或いは撥水性処理をセンサ13に施すには、以下の製造方法による。先ず、予め、カバー48の上面48eには撥水性処理を行なう。また、供給路51の天面となるカバー48の下面には親水性処理を全面に渡って施す。次に、基板46、スペーサ47、カバー48を貼り合わせる。そして、貼り合わせた後に、貯留部50の開口から短波長のUVを照射して、天面50aの親水性材料を分解除去する。
Such a hydrophilic treatment or water repellency treatment is applied to the
以上のように製造することにより、カバー48の上面48eを撥水性にするとともに、供給路51内を親水性にすることができる。また、貯留部50内部は、供給路51より親水性の弱いもの、或いは上面48eより、撥水性の弱いものを実現することができる。
By manufacturing as described above, the
また、本実施の形態における各部材の厚みは以下のようになっている。即ち、基板46の厚み(0.188mm)と、スペーサ47の厚み(0.100mm)と、カバー48の厚み(0.075mm)との比は、略1:1.3:2.5となっており、センサ13の薄型化を図りながら、しかも十分な血液を溜める貯留部50を形成することができる。また、スペーサ47の厚み(0.100mm)により、供給路51の毛細管現象の効果も十分に得ることができる。
Moreover, the thickness of each member in this Embodiment is as follows. That is, the ratio of the thickness of the substrate 46 (0.188 mm), the thickness of the spacer 47 (0.100 mm), and the thickness of the cover 48 (0.075 mm) is approximately 1: 1.3: 2.5. In addition, while the thickness of the
以下、センサ13における作用効果について説明する。先ず、空気孔53と穿刺孔60の関係に関する作用効果について説明する。本実施の形態におけるセンサ13は、針14によって形成される穿刺孔60(図5参照)の面積より、空気孔53の面積を小さくしたものである。即ち、空気孔53の面積より穿刺孔60の面積の方を大きくすることにより、空気孔53より穿刺孔60の方が血液62の流出に対する抵抗が小さくなる。従って、過剰に採取された血液62があったとしても、その血液62のほとんどは穿刺孔60から流出することになる。このことにより、空気孔53から流出する血液62は極めて少なくなり、この血液62により試薬54を押し流すようなことはない。即ち、試薬54は検出部52から移動することはなく、検出部52において血液62の正確な検査ができる。
Hereinafter, the function and effect of the
次に、撥水性、親水性の作用効果について説明する。本実施の形態におけるセンサ13は、カバー48の上面48eに撥水性処理が施されているので、空気孔53と穿刺孔60からの血液62の流出は抑制される。従って、無駄な血液62を採取する必要はなく、患者に負担をかけることはない。
Next, the effects of water repellency and hydrophilicity will be described. In the
更に、貯留部50は、供給路51より弱い親水性処理か、或いは上面48eより弱い撥水性処理が施されており、貯留部50に貯留された血液62は、一気に律速状態で検出部52に達する。従って、試薬54の溶融性にばらつきが生ずることはなく、正確な血液62の成分を測定することができる。
Furthermore, the
次に、貯留部50の容積と供給路51の容積の関係における作用効果について説明する。本実施の形態におけるセンサ13は、貯留部50の容積(0.904μL)と供給路51の容積(0.144μL)の比を略6:1としたものであり、貯留部50の容積は供給路51の容積の約6倍の容積を有している。従って、血液62の不足で検査が不正確になることはない。また、貯留部50の容積は必要とする供給路51の容積に対して大き過ぎることはなく、血液62が大量に供給路51を流れて試薬54を押し流すこともない。従って、この面でも血液62の流れが律速状態となり、試薬54の溶解性にばらつきが生ずることはなく、正確な血液62の検査ができる。
Next, the effect in the relationship between the volume of the
また、採取する血液62の量は、血液62の検査に必要十分な微小容量に形成されたものであり、供給路容積の約6倍の血液62を採取するのみであり、患者にかける負担を極めて少なくすることができる。なお、正確な測定のために血液62の採取量と、患者への負担を少なくするための血液62の採取量とを勘案して、貯留部50の容積は、供給路51の容積の5倍以上、7倍以下が最適となる。
In addition, the amount of blood 62 to be collected is formed in a micro volume necessary and sufficient for the examination of the blood 62, and only the blood 62 that is about 6 times the volume of the supply channel is collected. It can be very small. Note that the volume of the
図4は、センサ13の透視平面図である。基板46上には検出部52を構成する検出電極55,56,57,58が形成されており、これらの検出電極は、例えば順番に作用極、検知極、対極、Hct(ヘマトクリット)極として作用する。そして、これらの検出電極55〜58は、基板46の外周側に形成された接続電極55a,56a,57a,58aに夫々対応して接続されている。そして、これらの接続電極55a〜58aは、コネクタ25(このコネクタ25にはコネクタ25a、25b、25c、25d,25eが含まれる)に夫々接続される。55b〜58b、58cは、夫々対応するコネクタが接触する接触場所であり、基板46の外周近傍に配置されている。
FIG. 4 is a perspective plan view of the
接触場所58cは接続電極58a内に接触場所58bと共に形成されている。これは接触場所58cと接触場所58bとの導通を測定することにより、センサ13の装着の有無の検知や接続電極55a〜58aの夫々の位置を特定する基準とするためのものである。
The contact location 58c is formed in the connection electrode 58a together with the contact location 58b. This is for measuring the continuity between the contact location 58c and the contact location 58b, thereby detecting whether or not the
以上のように構成されたセンサ13について、以下にその動作を説明する。図5に示すように、先ず、センサ13を患者の指等の皮膚61に当接させる。そして、針14を矢印59方向に発射させる。そうすると、針14は、貯留部50の天面50aを形成するカバー48を突き破り、このカバー48に穿刺孔60を形成する。そして針14は、この穿刺孔60を介して皮膚61に傷をつける。そうすると、この皮膚61から血液62が流出する。この流出した血液62は貯留部50を満たす。貯留部50を満たした血液62は供給路51に達し、この供給路51の毛細管現象で検出部52へ向かって一気に一定速度で流入する。
The operation of the
次に、図1と図4を参照しながら血糖値の測定について説明する。図4において、55b〜58bは接触場所であり、コネクタ25a〜25dと接続されている。血糖値の測定動作では、先ず切替回路27を切換えて、血液成分量を測定するための作用極となる検出電極55を電流/電圧変換器28に接続する。また、血液62の流入を検知するための検知極となる検出電極56を基準電圧源32に接続する。そして、検出電極55及び検出電極56間に一定の電圧を印加する。この状態において、血液62が流入すると、検出電極55,56間に電流が流れる。この電流は、電流/電圧変換器28によって電圧に変換され、その電圧値はA/D変換器29によってデジタル値に変換される。そして、演算部30に向かって出力される。演算部30はそのデジタル値に基づいて血液62が十分に流入したことを検出する。
Next, blood glucose level measurement will be described with reference to FIGS. In FIG. 4, 55b-58b is a contact location and is connected with the connectors 25a-25d. In the blood glucose level measurement operation, first, the switching
次に、血液成分であるグルコースの測定が行なわれる。グルコース成分量の測定は、先ず、制御部19の指令により、切替回路27を切換えて、グルコース成分量の測定のための作用極となる検出電極55を電流・電圧変換器28に接続する。また、グルコース成分量の測定のための対極となる検出電極57を基準電圧源32に接続する。
Next, glucose, which is a blood component, is measured. In the measurement of the glucose component amount, first, the switching
なお、例えば血液中のグルコースとその酸化還元酵素とを一定時間反応させる間は、電流/電圧変換器28及び基準電圧源32をオフにしておく。そして、一定時間(1〜10秒)の経過後に、制御部19の指令により、検出電極55と57間に一定の電圧(0.2〜0.5V)を印加する。そうすると、検出電極55,57間に電流が流れる。この電流は電流/電圧変換器28によって電圧に変換され、その電圧値はA/D変換器29によってデジタル値に変換されて、演算部30に向かって出力される。演算部30はそのデジタル値を基にグルコース成分量に換算する。なお、時間はタイマ33で測定される。
For example, the current /
次に、グルコース成分量の測定後、Hct値の測定が行なわれる。Hct値の測定は次のように行なわれる。先ず、制御部19からの指令により切替回路27を切換える。そして、Hct値の測定のための作用極となる検出電極58を電流/電圧変換器28に接続する。また、Hct値の測定のための対極となる検出電極55を基準電圧源32に接続する。
Next, after the glucose component amount is measured, the Hct value is measured. The Hct value is measured as follows. First, the switching
次に、制御部19の指令により、電流/電圧変換器27及び基準電圧源32から検出電極58と55間に一定の電圧(2V〜3V)を印加する。検出電極58と55間に流れる電流は、電流/電圧変換器28によって電圧に変換され、その電圧値はA/D変換器29によってデジタル値に変換される。そして演算部30に向かって出力される。演算部30はそのデジタル値に基づいてHct値に換算する。
Next, a constant voltage (2 V to 3 V) is applied between the
この測定で得られたHct値とグルコース成分量を用い、予め求めておいた検量線または検量線テーブルを参照して、グルコース成分量をHct値で補正し、その補正された結果をメモリ38に格納するとともに表示部31に表示する。このように補正された測定データに基づいてインスリンの投与量が自動的に設定される。このように、患者が自ら投与するインスリンの量を注射装置に設定する必要は無く、設定の煩わしさは無い。また、人為手段を介さずにインスリンの量を設定することができるので、設定ミスを防止することができる。
Using the Hct value and the glucose component amount obtained in this measurement, referring to a calibration curve or a calibration curve table obtained in advance, the glucose component amount is corrected with the Hct value, and the corrected result is stored in the
次に、センサ13を自動供給するセンサ供給手段35について説明する。図6(a)において、63は直方体形状をしたセンサ13の収納部であり、この収納部63にはセンサ13が積層して収納される。63aは押圧板であり、バネ63bでセンサ13を供給板64方向へ押圧している。63cは収納部63の上面に設けられた開口であり、センサ13の消費に応じてこの開口63cからセンサ13を供給する。また、63dは押圧板63aに連結されたつまみであり、このつまみ63dを矢印63e方向に移動して開口63cからセンサ13を供給する。なお、このつまみ63dの位置でセンサ13の残量を知ることができる。なお、収納部63を透明部材で形成してセンサ13の残量を検知しても良い。
Next, the sensor supply means 35 that automatically supplies the
センサ13は一枚ずつ供給板64に形成された供給孔69aにバネ63bの圧力で供給される。65は供給板64を回転させるモータであり、制御器66を介して制御部19に接続されている。また、67は透過型の光学センサであり、供給板64の回転角を検出するものである。この光学センサ67の出力は、制御器66を介して制御部19に接続されている。
The
25(25a〜25e)は、センサ13の接続場所55b〜58b、58cに接触するように設けられたコネクタであり、測定孔69b近傍に設けられている。そしてこのコネクタ25は、測定回路部26の切替回路27に接続されている。
Reference numeral 25 (25a to 25e) denotes a connector provided so as to contact the connection places 55b to 58b and 58c of the
図6(b)は、供給板64の平面図である。この供給板64は円形をしており、収納部63の開口側に回転自在に装着されている。この供給板64は、中心64eから等角度に4個の長方形状をしたセンサ挿入孔69(このセンサ挿入孔69には供給孔69a、測定孔69b、排出孔69dが含まれる)が設けられている。このセンサ挿入孔69は長方形状をしたセンサ13が嵌入するものであり、このセンサ挿入孔69に挿入されたセンサ13の接続場所55b〜58b、58cは夫々コネクタ25a〜25eに接続されることになる。
FIG. 6B is a plan view of the
また、この4個のセンサ挿入孔69に対応して4個の検出孔64fが設けられている。この供給板64の中心64eにはモータ65が減速機構を介して連結されている。そして、モータ65でこの供給板64を4分の1回転ずつ回転させるものである。この4分の1の回転は光学センサ67が検出孔64fを検出することにより行われる。
Further, four detection holes 64 f are provided corresponding to the four sensor insertion holes 69. A
この供給板64は矢印68方向に回転し、図において供給板64の上方に位置するセンサ挿入孔69がセンサ13の供給孔69aとなり、下方に位置するセンサ挿入孔69がセンサ13の測定孔69bとなる。また、この測定孔69bから90度の角度にあるセンサ挿入孔69がセンサ13の排出孔69dとなる。
The
従って、供給孔69aで収納部63から供給されたセンサ13は、測定孔69bまで回転して、血液62の採取をし、その性質が測定される。測定が終了したら4分の1回転して排出孔69dの位置で排出されることになる。このようにして、収納部63内にあるセンサ13を順次測定孔69bに供給することができる。
Accordingly, the
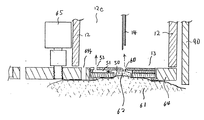
図7は、薬液投与装置11の断面図である。図7において、90は、筒体12とセンサ供給手段35と負圧手段37と測定回路部26を含む電気回路91が収納された筺体である。センサ供給手段35は筒体12の一方12a近傍の上面に装着されており、供給板64は一方12aの開口を塞ぐように装着されている。従って、通常時において、針14の先端は外部からは見えず恐怖心は軽減される。
FIG. 7 is a cross-sectional view of the drug solution administration device 11. In FIG. 7,
負圧手段37は、筒体12の上面であってセンサ供給手段35の後方に装着されている。そして、この負圧手段37の負圧出力は筒体12に設けられた負圧路92を通って筒体12内に連結しており、センサ13の近傍を負圧にする。この負圧手段37は図9に示すように筒体12の内部12cを負圧にする。また、供給板64に設けられた検出孔64fを介してセンサ13の下面を負圧にする。従って、皮膚61はセンサ13にピッタリと密着するので、血液62が流れ出して皮膚61を汚すことはない。また、負圧手段37は、穿刺前においては空気孔53を介して貯留部50内を負圧にする。従って、貯留部50内の皮膚61が緊張状態となり、穿刺が容易となる。更に、穿刺後においては穿刺孔60を介して貯留部50を負圧にし、血液62を吸引し皮膚61からの血液62の流出を加速させる。
The negative pressure means 37 is mounted on the upper surface of the
電気回路91は、負圧手段37の更に後方に装着されており、センサ供給手段35と負圧手段37と押し出し手段17と往復運動手段18を制御する。
The
次に、図7に戻り筒体12内を中心に説明する。15はインスリン16が封入された円筒形状のカートリッジであり、このカートリッジ15の先端15aと後端15bは夫々ゴムで形成された栓15c、15dが挿入されている。
Next, returning to FIG. 7, the inside of the
71は、カートリッジ15が挿入されるカートリッジホルダであり、このカートリッジホルダ71にカートリッジ15が着脱自在に装着される。このカートリッジ15の先端側には円形のキャップ72が装着されている。そして、このキャップ72の略中央には針14が装着されている。この針14の根元側は、カートリッジ15の先端15aに挿入された栓15cを貫通してインスリン16まで達している。
73は、インスリン16を針14方向に押し出す動力として用いるDC(直流)モータであり、このモータ73の回転軸はギアで形成された減速機構89を介してシャフト74に連結している。このシャフト74の表面には、雄ねじ74aが形成されている。
Reference numeral 73 denotes a DC (direct current) motor used as power for pushing the
75はシャフト74に連結して設けられたエンコーダであり、76はこのエンコーダ75の回転(回転量及び回転速度)を検出する透過型のセンサである。なお、このセンサ76は透過型である必要は無く、反射型センサであっても良い。また、エンコーダ75は、図8に示すように円板形状をしている。75aは回転の中心であり、75bは外周近傍の内側の同心円上に設けられた孔である。この孔75bは等間隔に12個設けている。モータ73が回転することにより、このエンコーダ75が回転する。そうすると、センサ76からはこの孔75bを透過する度に光信号がパルス信号に変換されて出力される。従って、このパルス信号を計数することで、モータ73の回転数やシャフト74の回転数(回転角を含む)、並びに回転速度を容易かつ精密に計測することができる。このエンコーダ75とセンサ76とで回転数検出部17aを構成している。
図7に戻って、77は、ピストン78に連結して固定されたナットであり、このナット77の内側にはシャフト74に形成された雄ねじ74aと螺合する雌ねじ77aが設けられている。従って、モータ73が正方向に回転することにより、シャフト74の回転運動がナット77と協働して、ピストン78を矢印79に示す前進する方向(針14の装着された方向)に移動させる。そして、その移動する距離はセンサ76から出力されるパルス信号を計数することで測定することができる。また、移動する速度はセンサ76から出力されるパルス信号の密度(周波数)で測定することができる。従って、ピストン78の移動量を精密にコントロールすることができる。この雄ねじ74aと雌ねじ77aとで回転数/直進運動変換部17bを構成している。
Returning to FIG. 7, reference numeral 77 denotes a nut connected and fixed to the
ピストン78の先端は、カートリッジ15に挿入された栓15dに当接している。この栓15dはカートリッジ15の後端15b方向から先端15aの方向に摺動可能に設けられている。従って、ピストン78が矢印79方向に前進することにとり、カートリッジ15内の栓15dが矢印79方向に押される。このようにして、精密なインスリン16の量を中空の針14の先端から患者に投与することができる。なお、モータ73を逆回転させれば、ピストン78は矢印79と反対方向に後退する。
The tip of the
80は、モータ73が固定されたフレームであり、このフレーム80はモータ73を囲うように設けられている。ここで、モータ73とシャフト74とナット77とピストン78とエンコーダ75とセンサ76と押し出しを制御する制御部19の一部(図1参照)とでインスリン16を押し出す押し出し手段17を形成している。
81は、筒体12に固定されたDCモータである。このDCモータ81は、フレーム80に往復運動を与える動力として用いるものであり、カートリッジ15と針14もフレーム80に従って往復運動する。モータ81の回転軸はギアで形成された減速機構(図示せず)を介してシャフト82に連結している。このシャフト82の表面には、雄ねじ82aが形成されている。
83はシャフト82に連結して設けられたエンコーダであり、84はこのエンコーダ83の回転(回転量及び回転速度)を検出する透過型のセンサである。なお、このセンサ84も透過型である必要は無く、反射型センサであっても良い。また、エンコーダ83は、図8に示したエンコーダ75と同様であり、モータ81が回転することにより、このエンコーダ83が回転する。そうすると、エンコーダ83の回転情報(回転量及び回転速度)がセンサ84からパルス信号となって出力される。従って、このパルス信号を計数することで、モータ81の回転数やシャフト82の回転数(回転角を含む)、並びに回転速度を計測することができる。このエンコーダ83とセンサ84とで回転数検出部18aを構成している。
85は、フレーム80に固定されたナットであり、このナット85の内側にはシャフト82に形成された雄ねじ82aと螺合する雌ねじ85aが設けられている。従って、フレーム80の移動量を精密にコントロールすることができる。この雄ねじ82aと雌ねじ85aとで回転数/直進運動変換部18bを構成している。
Reference numeral 85 denotes a nut fixed to the
従って、モータ81が正方向に回転することにより、シャフト82の回転運動がナット85と協働して、フレーム80を矢印86で示す前進する方向に移動させる。そして、その移動する距離はセンサ84から出力されるパルス信号の数で検出することができる。また、移動する速度はセンサ84から出力されるパルス信号の密度(周波数)で検出することができる。
Accordingly, when the
即ち、シャフト82の先端は、ナット85を介してフレーム80と連結しているので、モータ81が正回転すると、フレーム80が矢印86方向に前進することになり、押し出し手段17全体を前進させることになる。逆に、モータ81が逆回転すると、フレーム80が矢印86と反対方向に進む(即ち後退)ことになり、押し出し手段17全体を後退させることになる。このようにして、モータ81を正回転、或いは逆回転させることにより、押し出し手段17及びこの押し出し手段17に連結されたカートリッジ15や針14を精密に往復運動させることができる。ここで、モータ81とシャフト82とナット85とエンコーダ83とセンサ84と往復運動を制御する制御部19の一部(図1参照)とで往復運動手段18を形成している。
That is, since the tip of the
また、フレーム80から外側に向かってフレーム凸部80aが形成されており、一方筒体12には、フレーム凸部80aが嵌入するレール87が設けられている。従って、フレーム凸部80aはレール87上を滑動する。即ち、フレーム80(カートリッジ15と針14も同じ)は、矢印86方向或いはその逆方向に往復運動する。このときフレーム凸部80aとレール87の効果により、筒体12との間において回転運動をすることはない。
Further, a frame convex portion 80a is formed outward from the
また同様に、ピストン78から外側に向かってピストン凸部78aが形成されており、一方フレーム80には、ピストン凸部78aが嵌入するピストンガイド88が設けられている。従って、ピストン凸部78aはピストンガイド88上を滑動する。即ち、ピストン78は、矢印79の方向或いはその逆方向に往復運動する。このときピストン凸部78aとピストンガイド88の効果により、フレーム80との間において回転運動をすることはない。
Similarly, a piston convex portion 78a is formed outward from the
以上のように構成された薬液投与装置11について、以下その動作を説明する。図10において、先ず、ステップ101において薬液投与装置11の電源スイッチをオンする。そして、ステップ102の準備ステップに移り、薬液投与装置11の動作種類の表示として表示部31には「血糖値の測定」の表示がなされる。
About the chemical | medical solution administration apparatus 11 comprised as mentioned above, the operation | movement is demonstrated below. In FIG. 10, first, in step 101, the power switch of the drug solution administration device 11 is turned on. Then, the process proceeds to the preparation step of
このとき制御部19では、センサ供給手段35に設けられたコネクタ25d、25eによる短絡信号を検知してセンサ13有り状態の検知と、押し出し手段17の押し出し量によりインスリン16の残量の検知と、当接スイッチ36の皮膚61への当接検知の確認を行なう。これらの検知確認のうち一つでも条件が揃わないときは警報手段39で警報するとともに、表示部31にその内容を表示する。全ての条件が揃った状態で「OK」の旨を表示部31に表示する。そして、患者は「OK」の表示を確認した後、開始ボタン40を押下する。すると、ステップ103の負圧発生ステップに移行する。
At this time, the control unit 19 detects the short-circuit signal by the connectors 25d and 25e provided in the sensor supply means 35 to detect the presence of the
ステップ103では、負圧手段37を動作させて負圧路92を介してセンサ13の近傍に負圧を加える。この負圧で皮膚61とセンサ13の下面とを密着させる。また、センサ13の貯留部50内は空気孔53を介して負圧を加える。このようにして皮膚61の表面を負圧にして皮膚を緊張状態にすることにより、穿刺を容易にし、ステップ104の穿刺ステップに移行する。
In
ステップ104では、モータ81を正回転させて、往復運動手段18を高速(0.05sec)で小距離(10mm)前進させる。針14はセンサ13のカバー48を突き破り、皮膚61に傷をつける。そして、ステップ105の採血ステップに移行する。
ステップ105では、前記傷から血液62が流出し、この血液62で貯留部50が満たされる。このとき、貯留部50の天面50aには針14で穿刺孔60が形成されるので、負圧はこの穿刺孔60を介して貯留部50内を更に負圧にし、血液の流出を助長する。貯留部50を満たした血液62は毛細管現象で供給路51を律速(一定の速度)状態で検出部52に至る。そして、ステップ106の負圧停止ステップに移行する。
In
In
ステップ106では、血液62が検出電極56に到達したことを検出して負圧手段37の負圧動作を停止させる。従って、血液62の採取量は最低となり、患者にかける負担は最低となる。負圧動作を停止させた後、ステップ107の測定ステップに移行する。ここで、予め定められた時間が経過しても、検出電極56で血液62の流入が検出できないときは、警報手段39を動作させ警報するともに表示部31にその旨と今後の処置を表示する。また、これまでのステップにおいて、当接スイッチ36がオフになった場合も同様に警報手段39を動作させ警報するともに表示部31にその旨と今後の処置を表示する。
In
ステップ107では、先ずグルコースの測定を行う。即ち、血液中のグルコースとグルコース酸化還元酵素とを一定時間反応させた後、検出電極55を作用極、検出電極57を対極として、前記両検出電極55,57間に電圧を印加する。そして、グルコースの測定を行う。
In
次に、Hct値の測定をする。検出電極58を作用極、検出電極55を対極として、両検出電極55,58間に電圧を印加する。このことにより、Hct値に依存する電流が検出できる。従って、この電流に基づきHct値を測定する。
Next, the Hct value is measured. A voltage is applied between the
そして最後に、血液成分の補正を行なう。即ち、測定した前記Hct値を用いて、先に得られたグルコース量を補正する。この補正されたグルコース量はメモリ38に格納される。なお、このステップ107の後に負圧手段37を停止しても良い。この場合、薬液投与装置11が血液62の測定中の時間皮膚61に当接しているので、薬液投与装置11の動揺は少なく、試薬54による化学反応が安定するので、精密で安定した測定が可能となる。次にステップ108の薬液投与ステップに移る。
Finally, the blood component is corrected. That is, the previously obtained glucose amount is corrected using the measured Hct value. The corrected glucose amount is stored in the
ステップ108では、モータ81を正回転させて、往復運動手段18を低速(0.2sec)で小距離(10mm)前進させる。そして、モータ73を正回転させて、押し出し手段17を低速(0.2sec)で前記メモリ38に格納されたグルコース量に基づいた距離前進させる。このことにより、精密にインスリン16の量が投与される。しかも、メモリ38に格納された測定値を自動的に用いるので、患者による投与量の設定ミスは生じない。次に、ステップ109の待機ステップに移行する。
ステップ109では、穿刺した状態で5秒間待機する。これは投与したインスリン16が確実に患者の体内に移行する時間である。そして、ステップ110の針14の後退ステップに移行する。
In step 108, the
In step 109, the process waits for 5 seconds with puncturing. This is the time when the administered
ステップ110では、モータ81を逆転させて、往復運動手段18を低速(0.2sec)で大距離(20mm)後退させる。そして、ステップ111の後処理ステップに移行する。
In step 110, the
ステップ111では、測定及び投与した日時、血糖値、投与量等を表示部31に表示する。そして、センサ供給手段35では、供給板64を4分の1回転させて、使用済みのセンサ13を排出(廃棄)されるとともに、未使用のセンサ13を供給孔64aに供給(測定孔64bにも未使用のセンサ13が供給される)される。そして、ステップ112の電源をオフするステップ112の終了ステップに移行する。
In step 111, the date and time of measurement and administration, blood glucose level, dosage, etc. are displayed on the
ステップ112では、薬液投与装置11の電源をオフして全ての動作を終了する。なお、薬液投与装置11に送信部を設けておけば、その結果を医療機関等に送信することができる。また、その他にも血液62の採取、測定、薬液の投与中に異常が発生した場合は、警報手段39で患者に警告するとともに、表示部31にその対処方法を表示するようになっている。
In
以上説明したように、患者は開始ボタン40を押下するのみであり、その操作は非常に簡単で容易なものとなり、操作にまつわる負担を著しく軽減することができる。
また、血液62を採取するための穿刺装置の機能と、前記血液62の性質を測定する測定装置の機能と、インスリン16を投与するための注射装置の機能とを同一筺体90内に有しているので容易に携帯することができる。
As described above, the patient only presses the start button 40, and the operation becomes very simple and easy, and the burden on the operation can be remarkably reduced.
Further, the
更に、血液62の採取と薬液を投与する針14、及びこの針14を往復運動させる往復運動手段18を共用化することができるので、小型化を実現することができる。
以上、グルコースの測定を例に説明したが、グルコースの測定の他に乳酸値やコレステロールの血液成分の測定にも有用である。
Further, since the
As described above, the measurement of glucose has been described as an example. However, in addition to the measurement of glucose, it is also useful for the measurement of blood components of lactic acid level and cholesterol.
本発明にかかる薬液投与装置は、操作が容易であり十分な訓練を受け難い患者が使用する医療装置等として有用である。 The drug solution administration device according to the present invention is useful as a medical device or the like used by a patient who is easy to operate and who is not easily trained.
11 薬液投与装置
12 筒体
12a 一方
13 センサ
14 針
15 カートリッジ
16 インスリン
17 押し出し手段
18 往復運動手段
19 制御部
26 測定回路部
38 メモリ
40 開始ボタン
62 血液
90 筺体
DESCRIPTION OF SYMBOLS 11 Chemical
Claims (18)
The control method according to claim 15, further comprising a preparatory step for detecting presence / absence of a blood sensor and presence / absence of a chemical solution before the puncturing step.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006022041A JP4802737B2 (en) | 2006-01-31 | 2006-01-31 | Chemical solution administration device and control method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006022041A JP4802737B2 (en) | 2006-01-31 | 2006-01-31 | Chemical solution administration device and control method thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007202632A true JP2007202632A (en) | 2007-08-16 |
| JP4802737B2 JP4802737B2 (en) | 2011-10-26 |
Family
ID=38482644
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006022041A Expired - Fee Related JP4802737B2 (en) | 2006-01-31 | 2006-01-31 | Chemical solution administration device and control method thereof |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4802737B2 (en) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010051720A (en) * | 2008-08-29 | 2010-03-11 | Jms Co Ltd | Transfusion device |
| WO2010056878A2 (en) * | 2008-11-14 | 2010-05-20 | Pepex Biomedical, Llc | Electrochemical sensor module |
| KR101186909B1 (en) | 2011-06-10 | 2012-10-08 | 한국과학기술원 | Blood collection module of blood sugar, measurement module, measurement device, measurement method using the same, and recording medium thereof |
| US8506740B2 (en) | 2008-11-14 | 2013-08-13 | Pepex Biomedical, Llc | Manufacturing electrochemical sensor module |
| US8951377B2 (en) | 2008-11-14 | 2015-02-10 | Pepex Biomedical, Inc. | Manufacturing electrochemical sensor module |
| US9044178B2 (en) | 2007-08-30 | 2015-06-02 | Pepex Biomedical, Llc | Electrochemical sensor and method for manufacturing |
| US9459228B2 (en) | 2007-08-30 | 2016-10-04 | Pepex Biomedical, Inc. | Electrochemical sensor and method for manufacturing |
| US9504162B2 (en) | 2011-05-20 | 2016-11-22 | Pepex Biomedical, Inc. | Manufacturing electrochemical sensor modules |
| JP2017169988A (en) * | 2016-03-25 | 2017-09-28 | テルモ株式会社 | Medical solution administration device and image display program |
| US10034629B2 (en) | 2011-01-06 | 2018-07-31 | James L. Say | Sensor module with enhanced capillary flow |
| US11045124B2 (en) | 2014-06-04 | 2021-06-29 | Pepex Biomedical, Inc. | Electrochemical sensors and methods for making electrochemical sensors using advanced printing technology |
| JP2021119988A (en) * | 2014-08-06 | 2021-08-19 | レプリセル ライフ サイエンシーズ インコーポレイテッド | Injection devices |
| US11224367B2 (en) | 2012-12-03 | 2022-01-18 | Pepex Biomedical, Inc. | Sensor module and method of using a sensor module |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002219114A (en) * | 2001-01-26 | 2002-08-06 | Matsushita Electric Works Ltd | Blood collecting device |
| JP2004000555A (en) * | 2002-04-25 | 2004-01-08 | Matsushita Electric Ind Co Ltd | Dosage determination support device, syringe, and health care support system |
| JP2005110712A (en) * | 2003-10-02 | 2005-04-28 | Matsushita Electric Ind Co Ltd | Blood component analysis sensor |
| JP2005177071A (en) * | 2003-12-18 | 2005-07-07 | Matsushita Electric Ind Co Ltd | Electric injector |
| WO2005077441A2 (en) * | 2004-02-18 | 2005-08-25 | Ares Trading S.A. | Hand-held electronically controlled injection device for injecting liquid medications |
-
2006
- 2006-01-31 JP JP2006022041A patent/JP4802737B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002219114A (en) * | 2001-01-26 | 2002-08-06 | Matsushita Electric Works Ltd | Blood collecting device |
| JP2004000555A (en) * | 2002-04-25 | 2004-01-08 | Matsushita Electric Ind Co Ltd | Dosage determination support device, syringe, and health care support system |
| JP2005110712A (en) * | 2003-10-02 | 2005-04-28 | Matsushita Electric Ind Co Ltd | Blood component analysis sensor |
| JP2005177071A (en) * | 2003-12-18 | 2005-07-07 | Matsushita Electric Ind Co Ltd | Electric injector |
| WO2005077441A2 (en) * | 2004-02-18 | 2005-08-25 | Ares Trading S.A. | Hand-held electronically controlled injection device for injecting liquid medications |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9044178B2 (en) | 2007-08-30 | 2015-06-02 | Pepex Biomedical, Llc | Electrochemical sensor and method for manufacturing |
| US11150212B2 (en) | 2007-08-30 | 2021-10-19 | Pepex Biomedical, Inc. | Electrochemical sensor and method for manufacturing |
| US11016052B2 (en) | 2007-08-30 | 2021-05-25 | Pepex Biomedical Inc. | Electrochemical sensor and method for manufacturing |
| US9746440B2 (en) | 2007-08-30 | 2017-08-29 | Pepex Biomedical, Llc | Electrochemical sensor and method for manufacturing |
| US9459228B2 (en) | 2007-08-30 | 2016-10-04 | Pepex Biomedical, Inc. | Electrochemical sensor and method for manufacturing |
| JP2010051720A (en) * | 2008-08-29 | 2010-03-11 | Jms Co Ltd | Transfusion device |
| US8506740B2 (en) | 2008-11-14 | 2013-08-13 | Pepex Biomedical, Llc | Manufacturing electrochemical sensor module |
| US10278632B2 (en) | 2008-11-14 | 2019-05-07 | Pepex Biomedical, LLC. | Electrochemical sensor module |
| US9445755B2 (en) * | 2008-11-14 | 2016-09-20 | Pepex Biomedical, Llc | Electrochemical sensor module |
| WO2010056878A2 (en) * | 2008-11-14 | 2010-05-20 | Pepex Biomedical, Llc | Electrochemical sensor module |
| US8951377B2 (en) | 2008-11-14 | 2015-02-10 | Pepex Biomedical, Inc. | Manufacturing electrochemical sensor module |
| US20110270061A1 (en) * | 2008-11-14 | 2011-11-03 | Pepex Biomedical, Llc | Electrochemical sensor module |
| WO2010056878A3 (en) * | 2008-11-14 | 2010-08-26 | Pepex Biomedical, Llc | Electrochemical sensor module |
| US10034629B2 (en) | 2011-01-06 | 2018-07-31 | James L. Say | Sensor module with enhanced capillary flow |
| US9504162B2 (en) | 2011-05-20 | 2016-11-22 | Pepex Biomedical, Inc. | Manufacturing electrochemical sensor modules |
| KR101186909B1 (en) | 2011-06-10 | 2012-10-08 | 한국과학기술원 | Blood collection module of blood sugar, measurement module, measurement device, measurement method using the same, and recording medium thereof |
| US11224367B2 (en) | 2012-12-03 | 2022-01-18 | Pepex Biomedical, Inc. | Sensor module and method of using a sensor module |
| US11045124B2 (en) | 2014-06-04 | 2021-06-29 | Pepex Biomedical, Inc. | Electrochemical sensors and methods for making electrochemical sensors using advanced printing technology |
| JP2021119988A (en) * | 2014-08-06 | 2021-08-19 | レプリセル ライフ サイエンシーズ インコーポレイテッド | Injection devices |
| JP7159386B2 (en) | 2014-08-06 | 2022-10-24 | レプリセル ライフ サイエンシーズ インコーポレイテッド | injection device |
| JP2017169988A (en) * | 2016-03-25 | 2017-09-28 | テルモ株式会社 | Medical solution administration device and image display program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4802737B2 (en) | 2011-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4802737B2 (en) | Chemical solution administration device and control method thereof | |
| RU2360248C2 (en) | Integrated measuring instrument for sample testing | |
| US8057404B2 (en) | Blood sensor, blood testing apparatus, and method for controlling blood testing apparatus | |
| EP1997432B1 (en) | Blood test device | |
| EP1997434B1 (en) | Blood inspection device | |
| CN101346101B (en) | Blood test apparatus | |
| US7998087B2 (en) | Blood test apparatus and blood test method | |
| RU2343833C2 (en) | Integral sample gauge | |
| US7976478B2 (en) | Blood test apparatus and method of controlling the same | |
| US8556828B2 (en) | Blood test device | |
| US20080200838A1 (en) | Wearable, programmable automated blood testing system | |
| JP5047194B2 (en) | Blood test equipment | |
| CN1407871A (en) | Body fluid measuring apparatus with lancet and lancet holder used for the measuring apparatus | |
| JP2007330510A (en) | Blood test device | |
| JP4952078B2 (en) | Blood test equipment | |
| JP5011936B2 (en) | Blood test equipment | |
| JP2008067743A (en) | Blood examination device | |
| JP2009039203A (en) | Blood testing apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090127 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110202 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110412 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110602 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20110614 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110712 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110725 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4802737 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140819 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |